
頼んでいた台形ねじ500mmが届きました。曲がってなくて一安心。

これまでの300mmと比較。
今週末はこの500mmねじを組み込んでZ軸の駆動系を完成させるところから着手です。
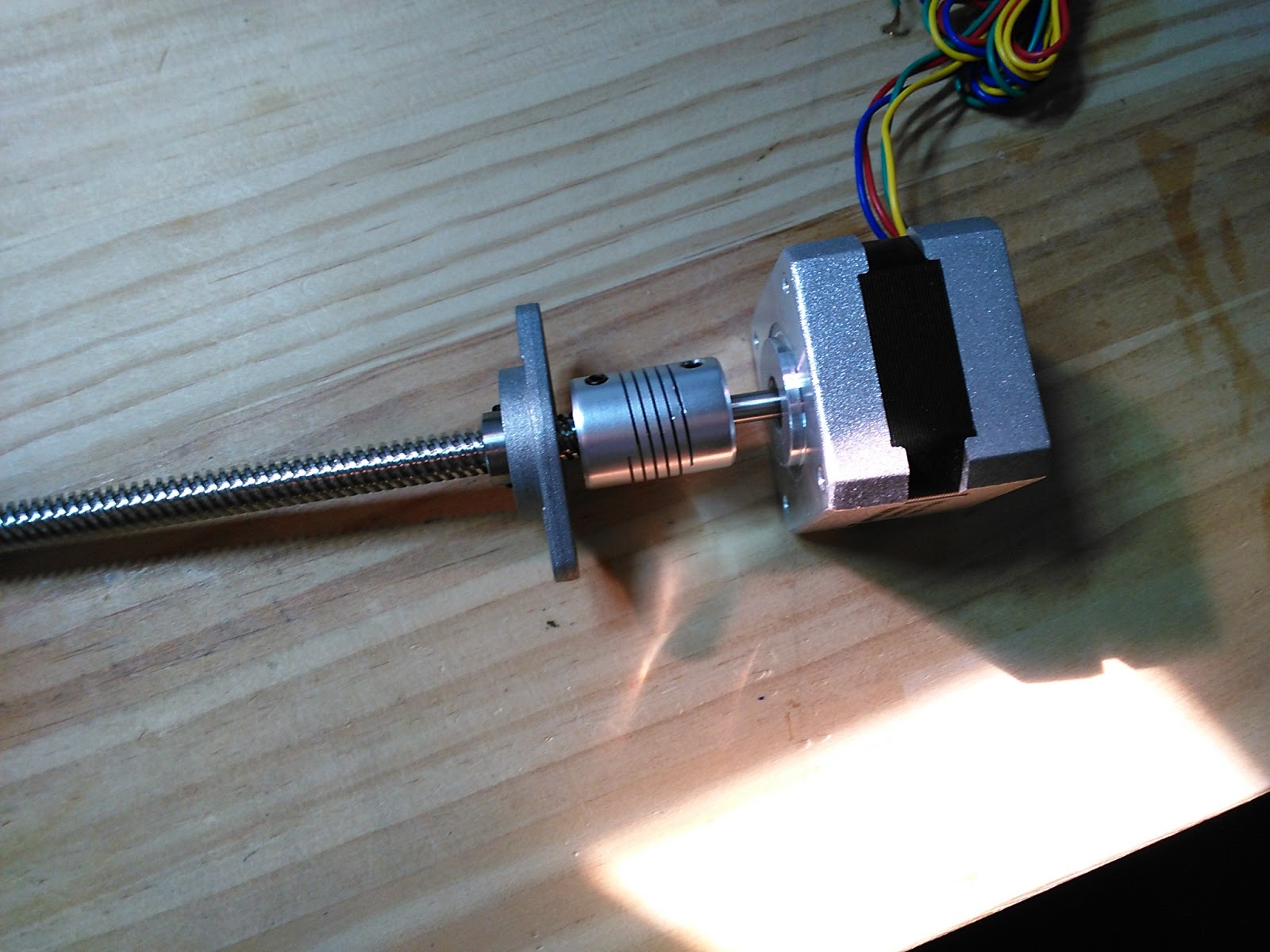
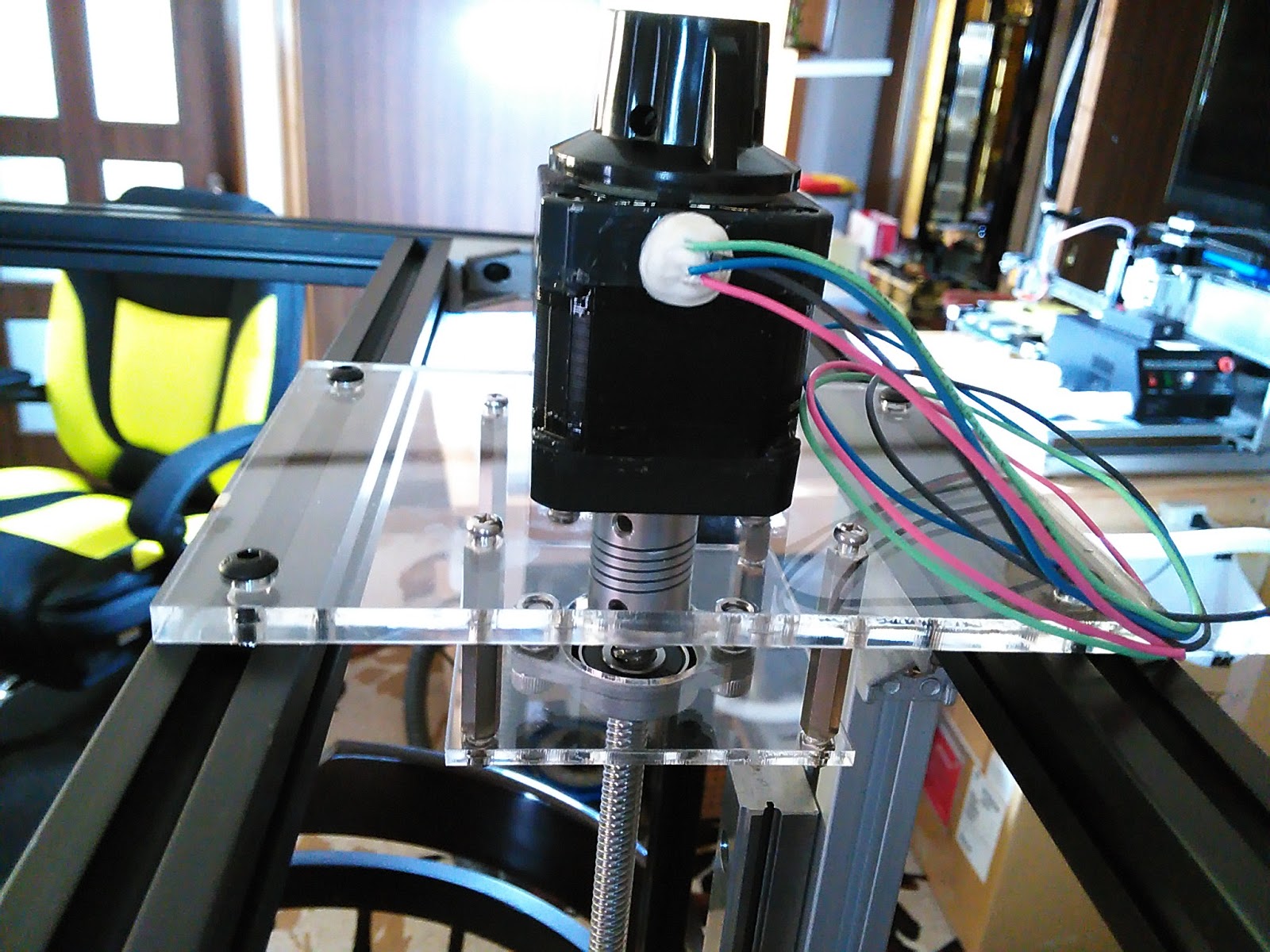
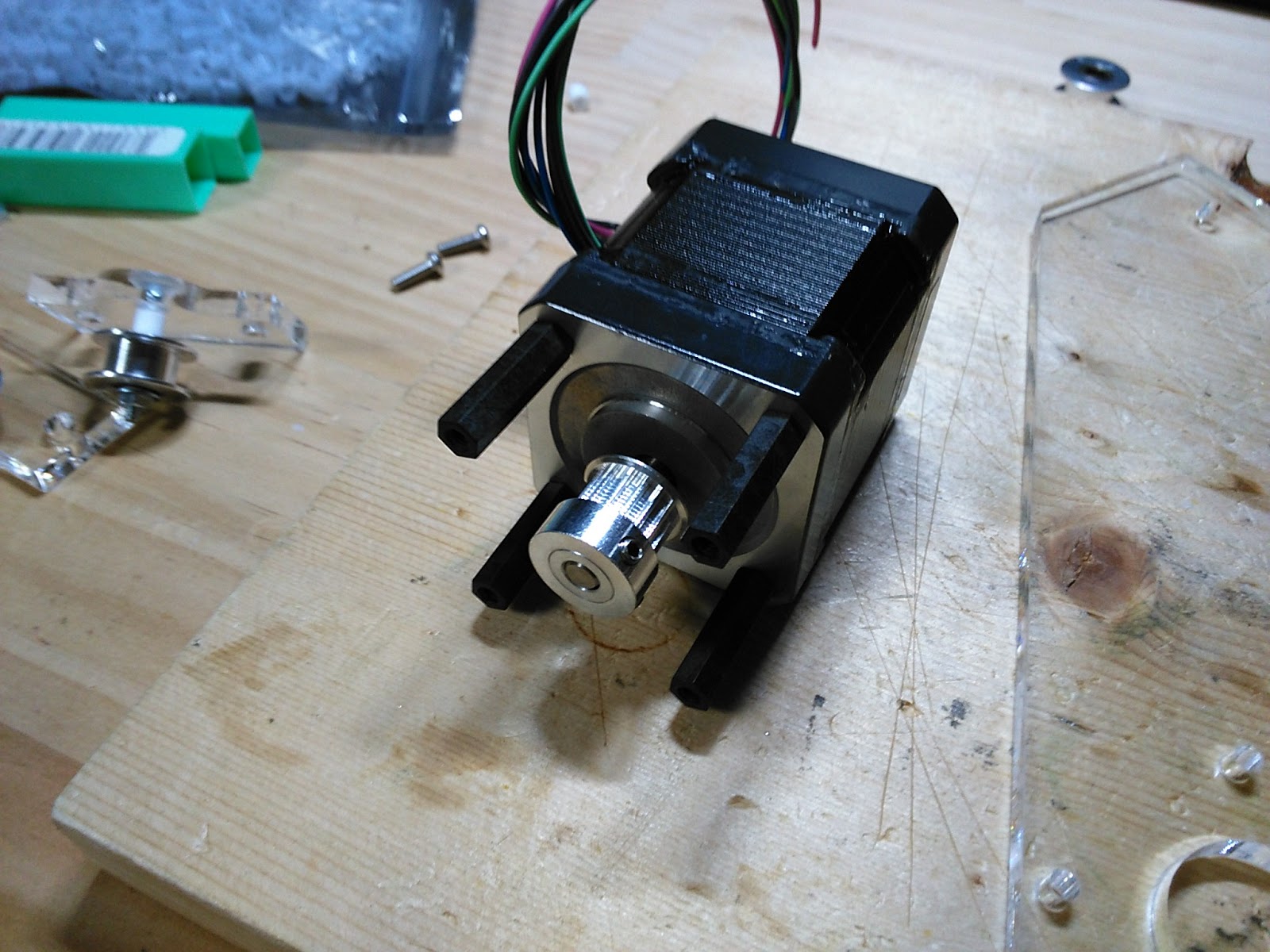
台形ねじは、

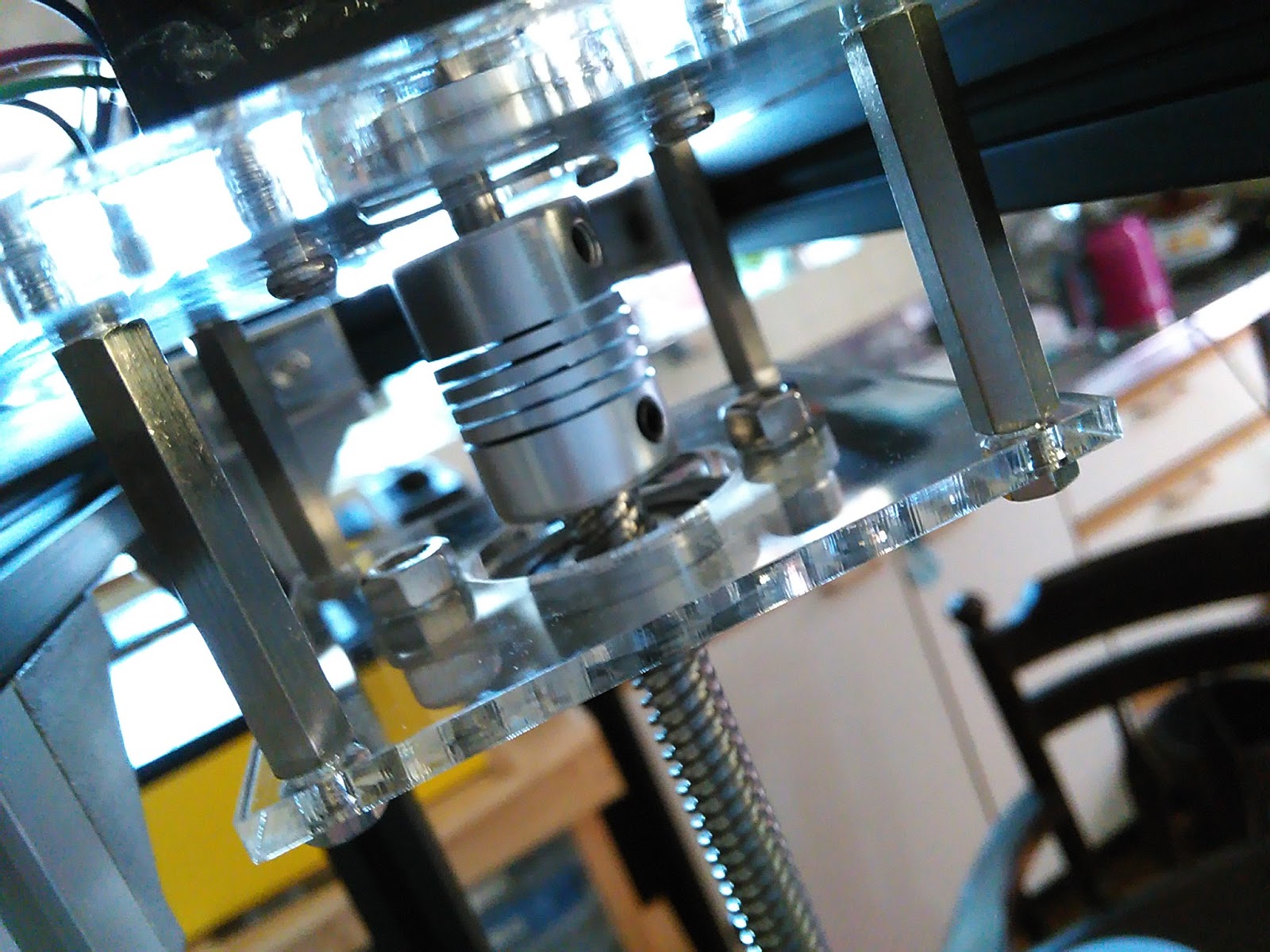
このカプラを介してステッピングモータと接続されます。

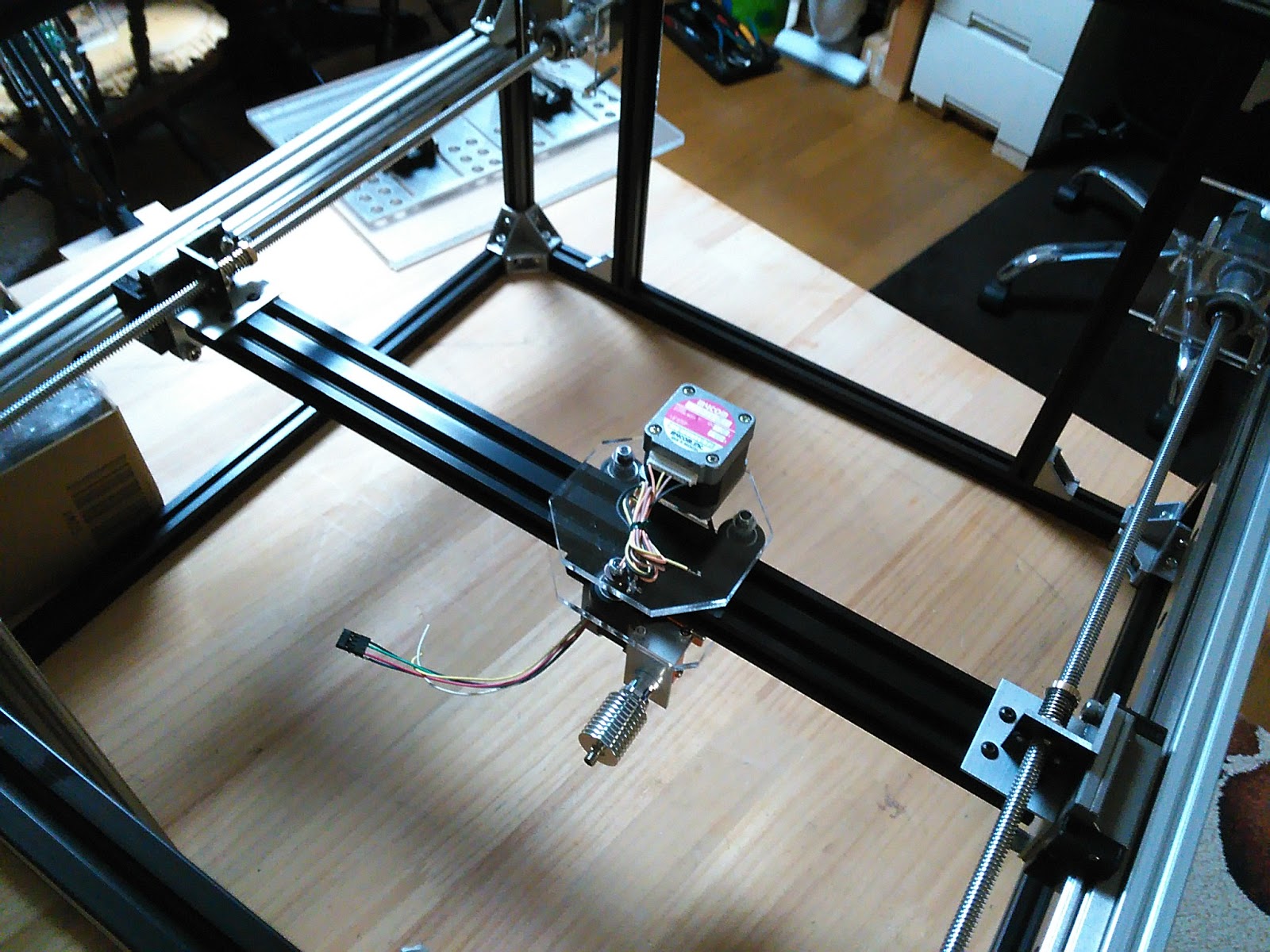
今回はモータを上に持っていきますので、X軸はモータにぶら下がる形になります。

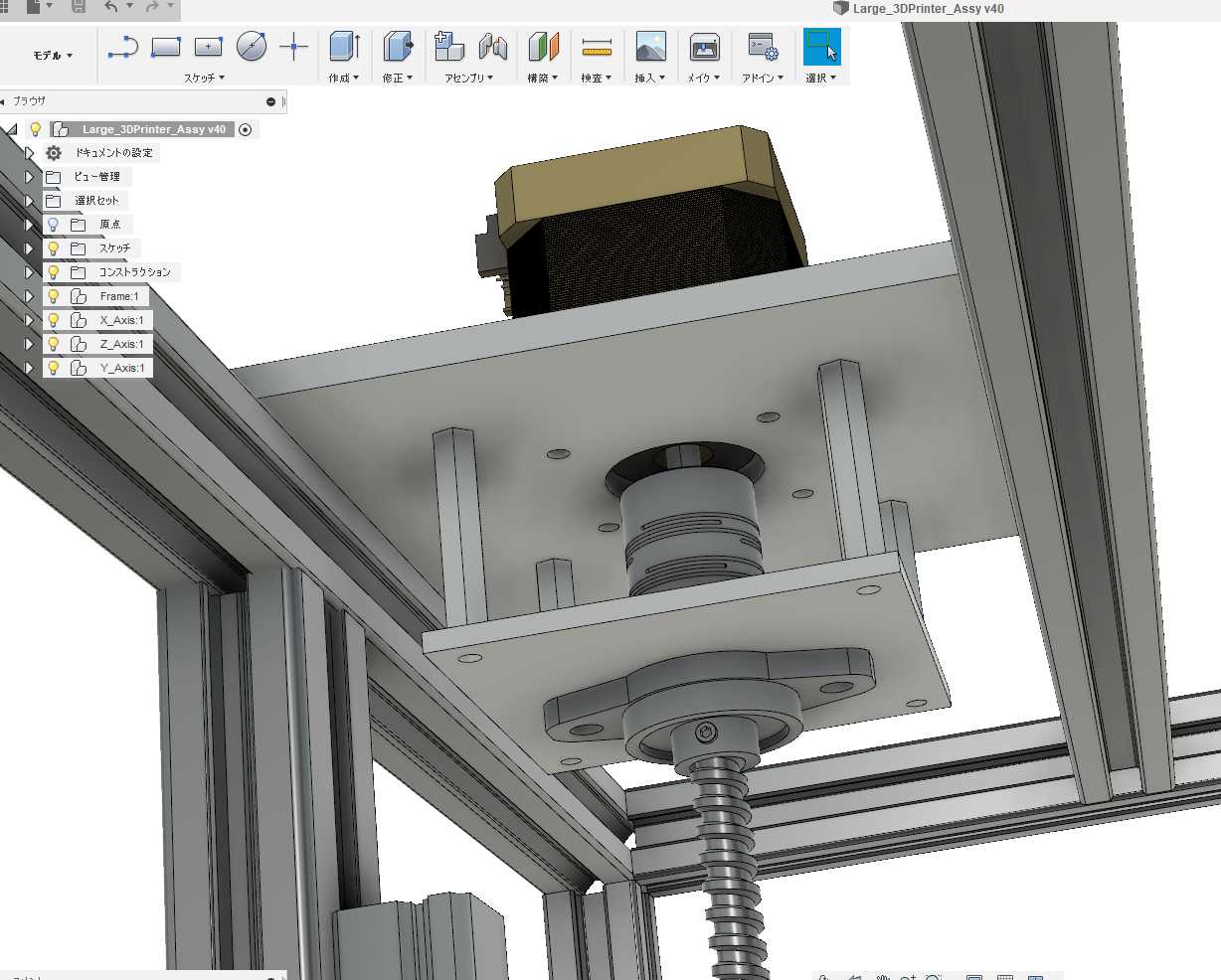
このカプラだけでモータをつなぐと、モータの軸にX軸、キャリッジ等々全重量がかかってしまいます。相当な重さになりますのでこのカプラはのびのびになってしまいます。
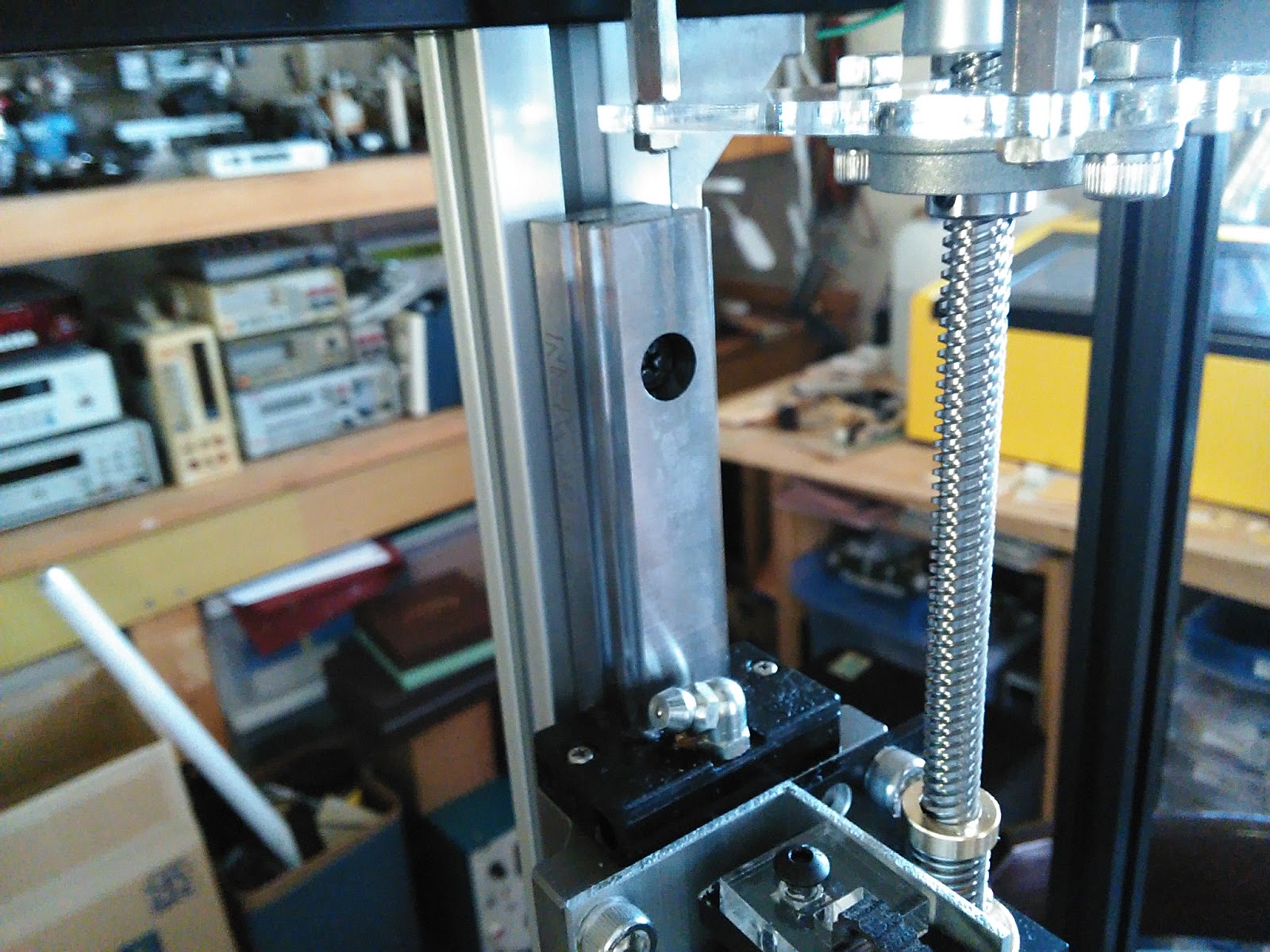
そこで、重さを支えるためだけのこのフランジ付きのベアリングブロックを使います。このベアリングブロックには軸を留めるためのイモネジがついていて、中に通す台形ねじをしっかり抱えることができます。このベアリングブロックを筐体で支えることで、重量を持つベアリングブロックと昇降を行うモータで仕事を分担します。


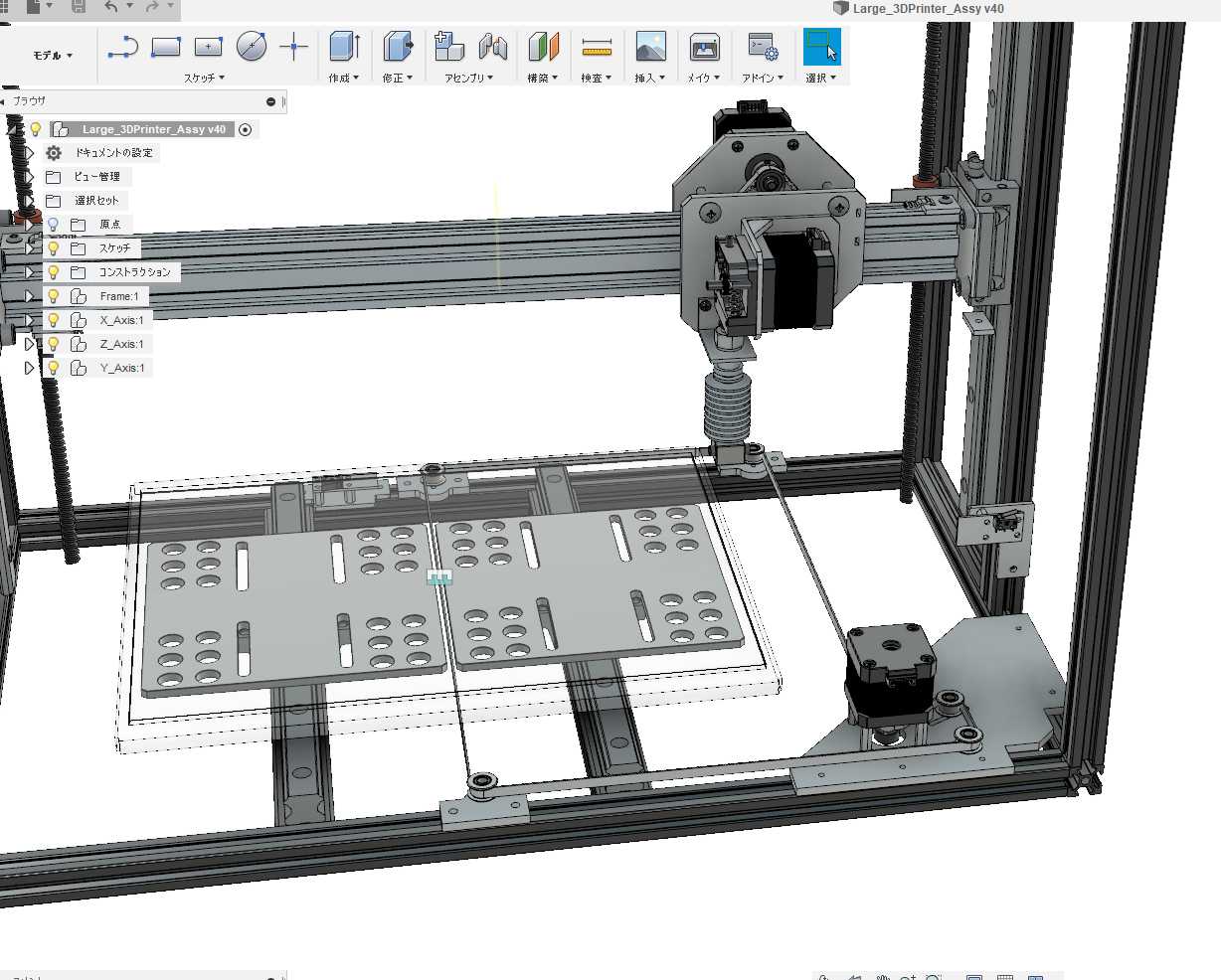
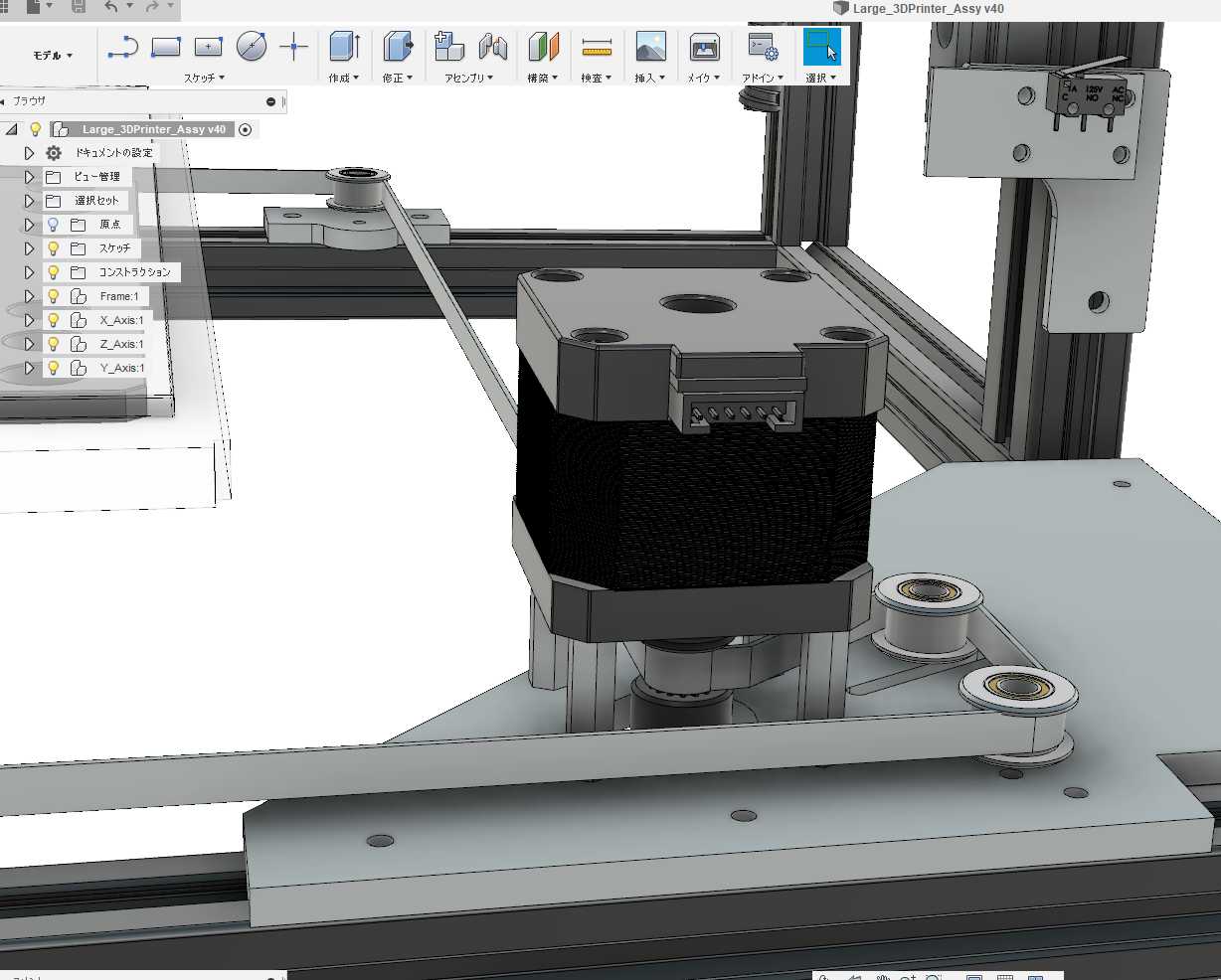
では設計です。
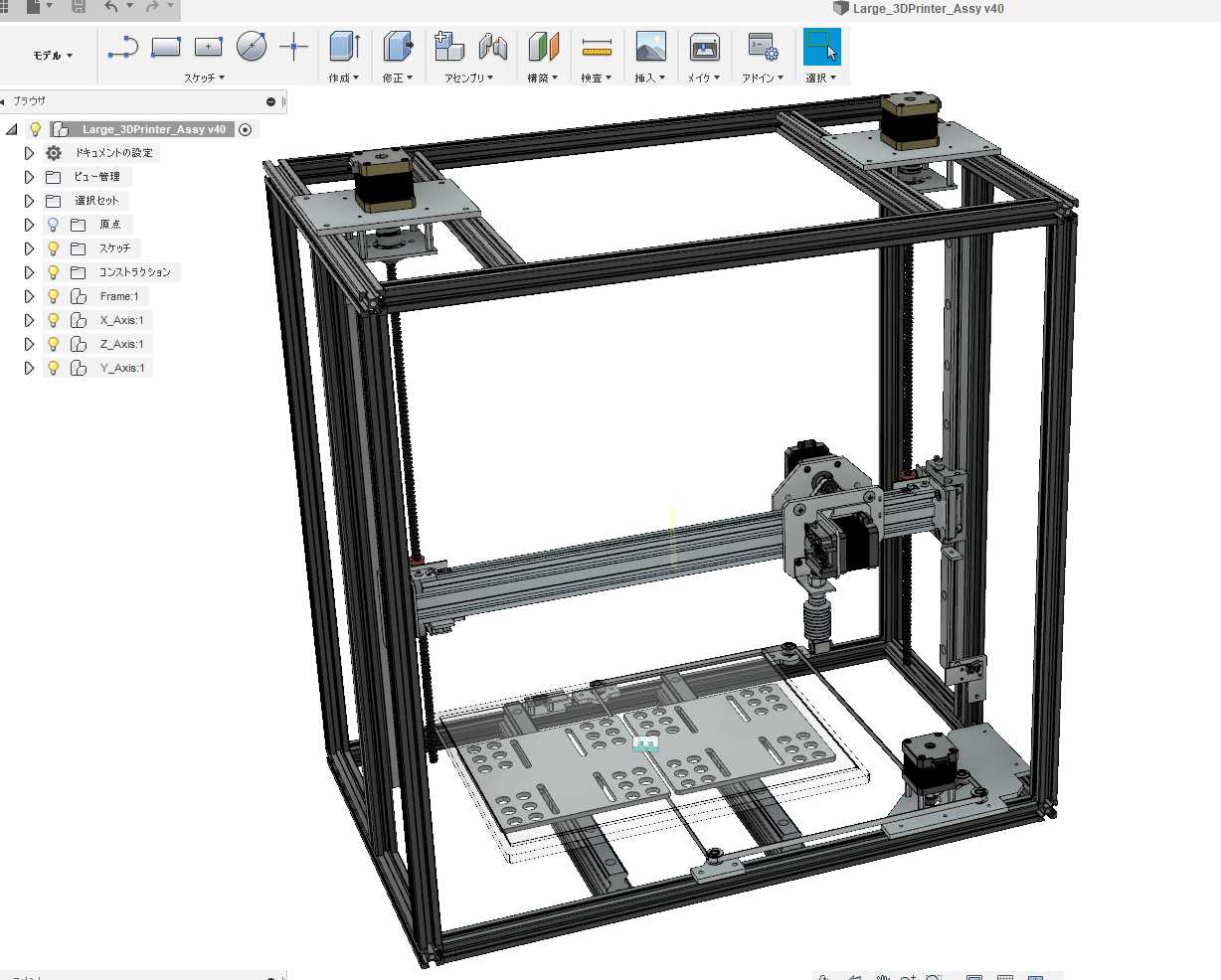
こんな感じでスペーサーでベアリングブロックを固定した板を支えて、カプラが入る空間を確保します。よくある構造です。
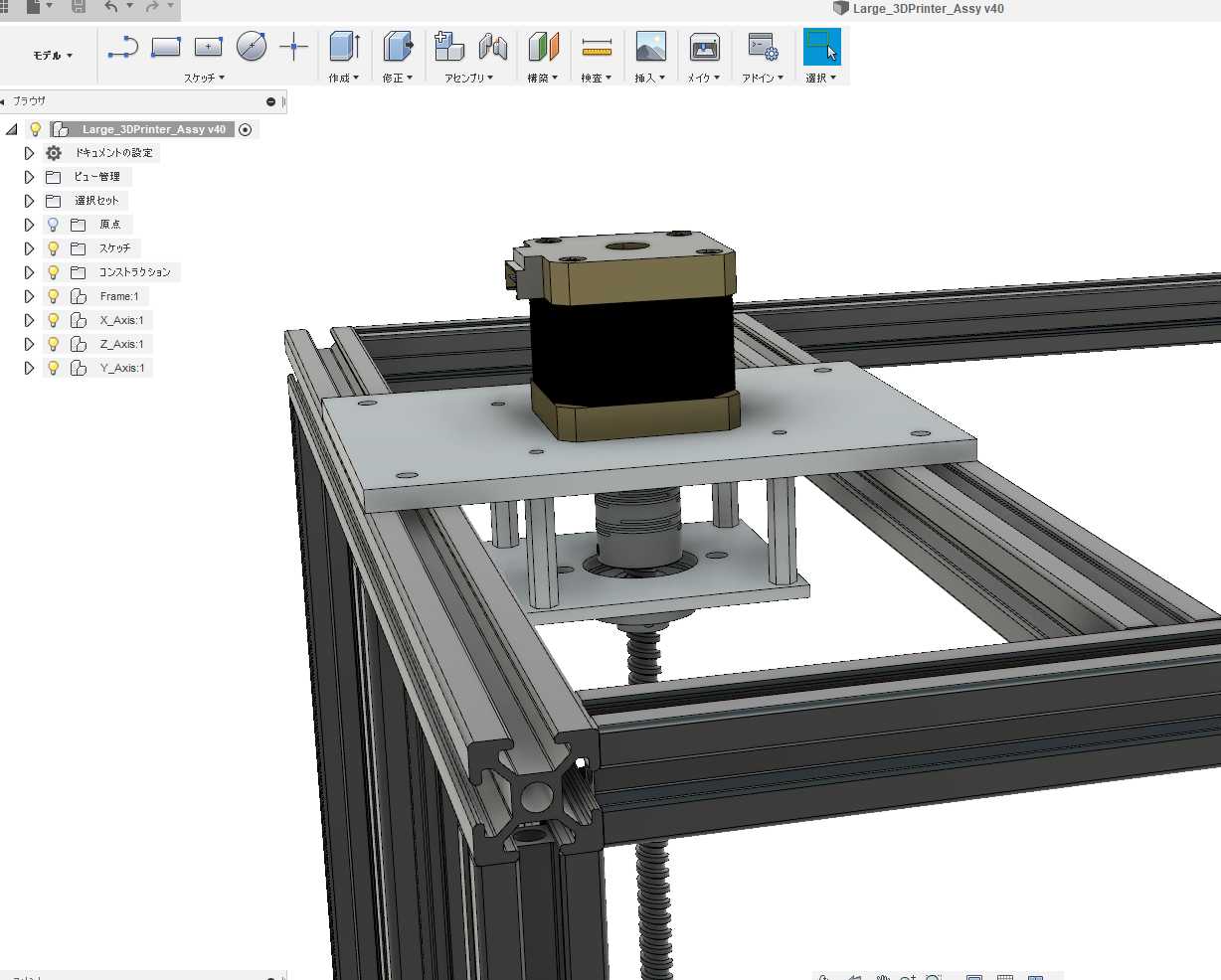
イモネジ回しやすいようにブロックは外に向けました。
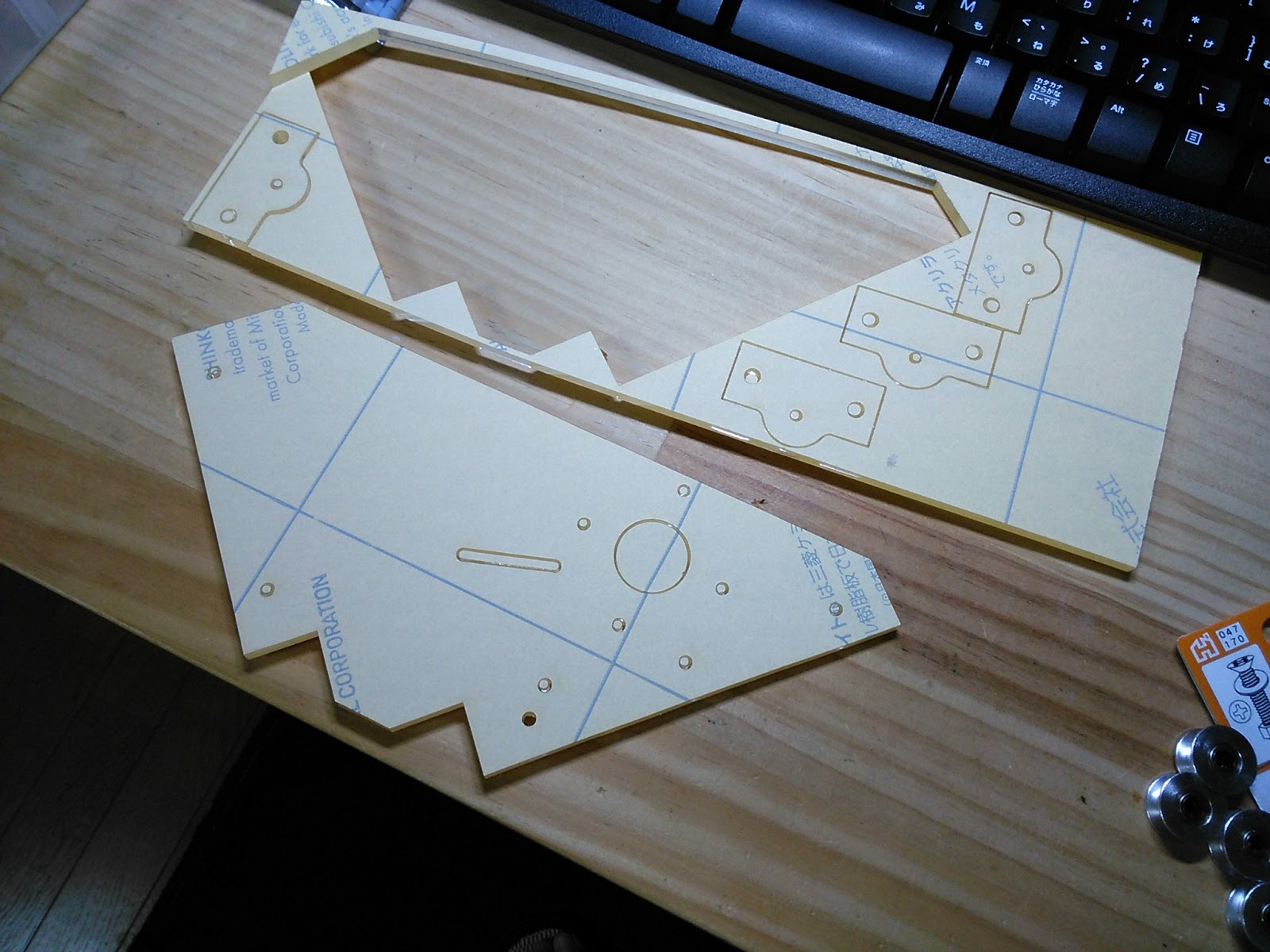
モデルからdxfを作ってレーザ加工機でアクリル板を切り出します。
ここは力がかかるところですので5mmの厚さを使うことに。

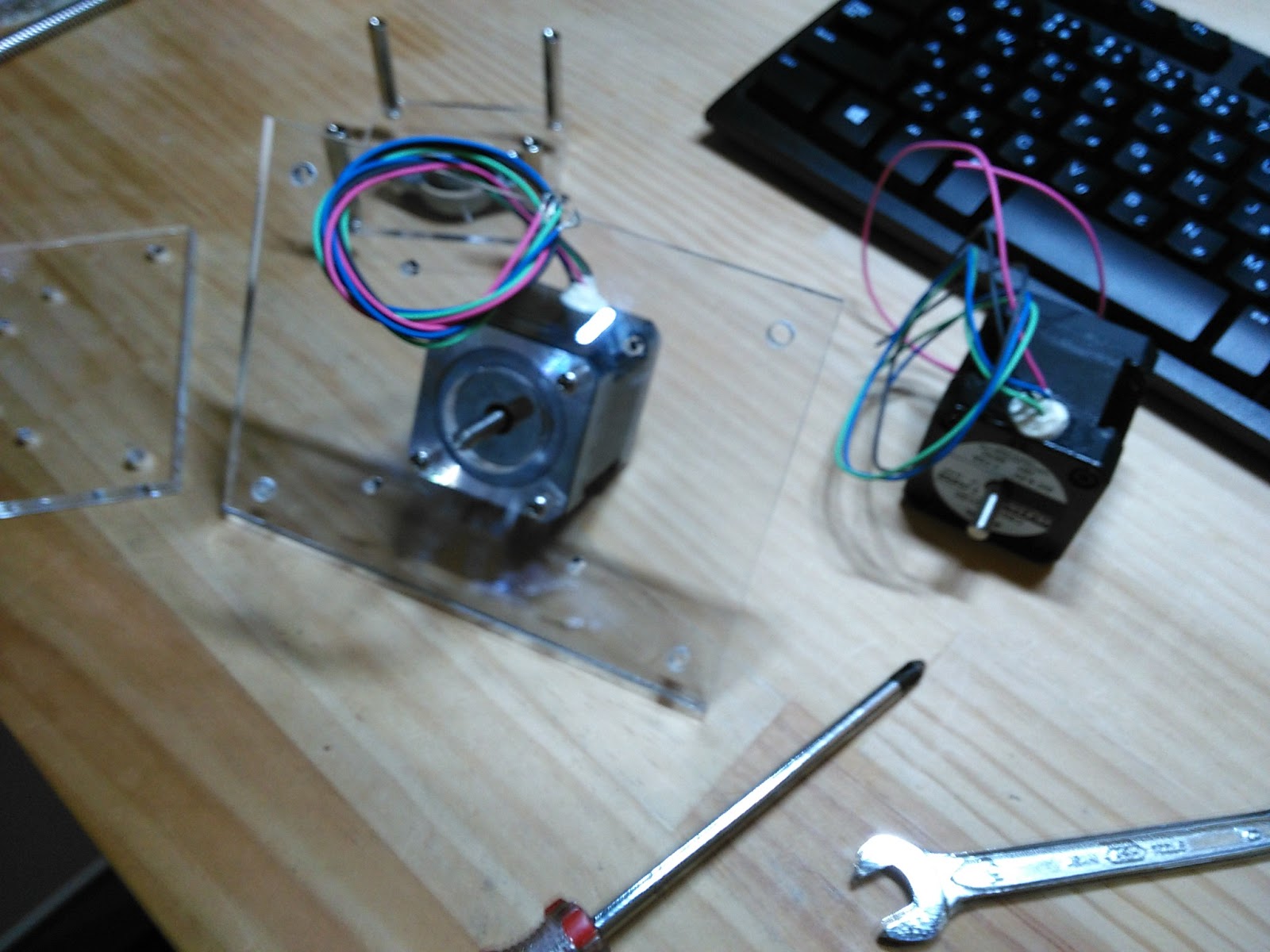
これがベアリングブロックを取り付ける板。

組み立てていきます。

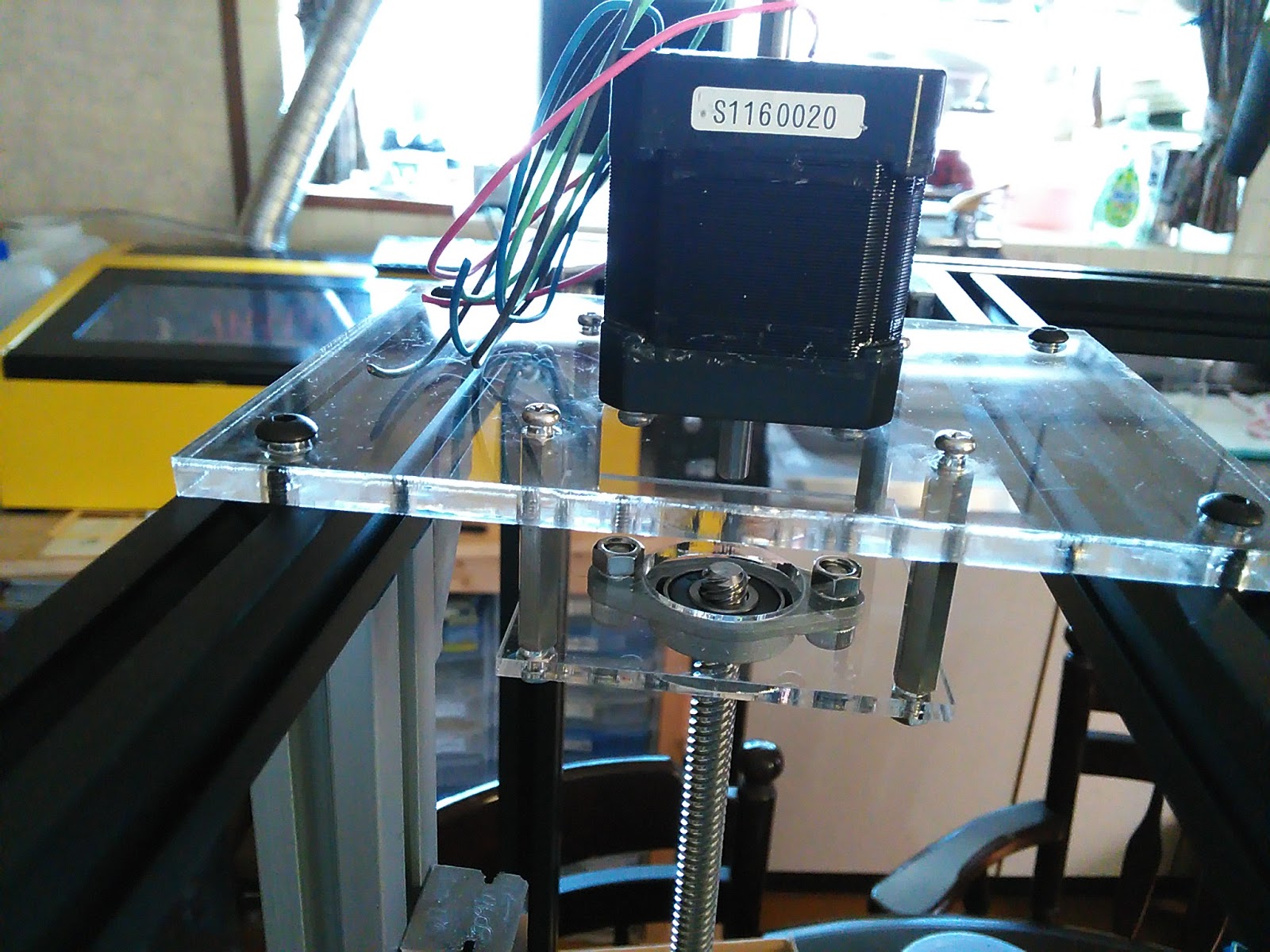
モータは、今は亡き日米無線電機で買ったVEXTAの二相バイポーラ、両軸のものを使います。
おおよその位置を合わせて板を仮固定。
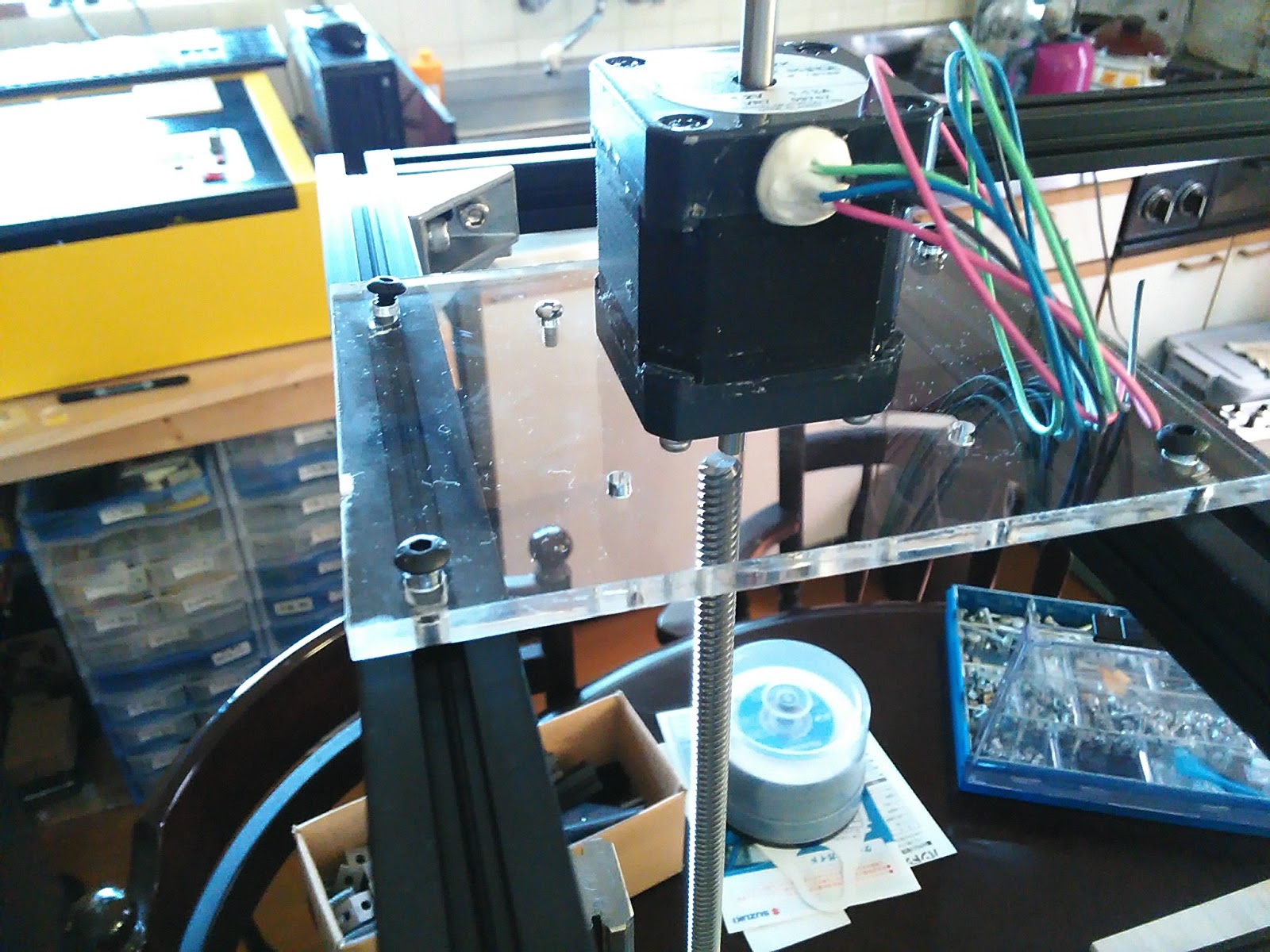
台形ねじもふらふらするのでいまいちやりにくいです。
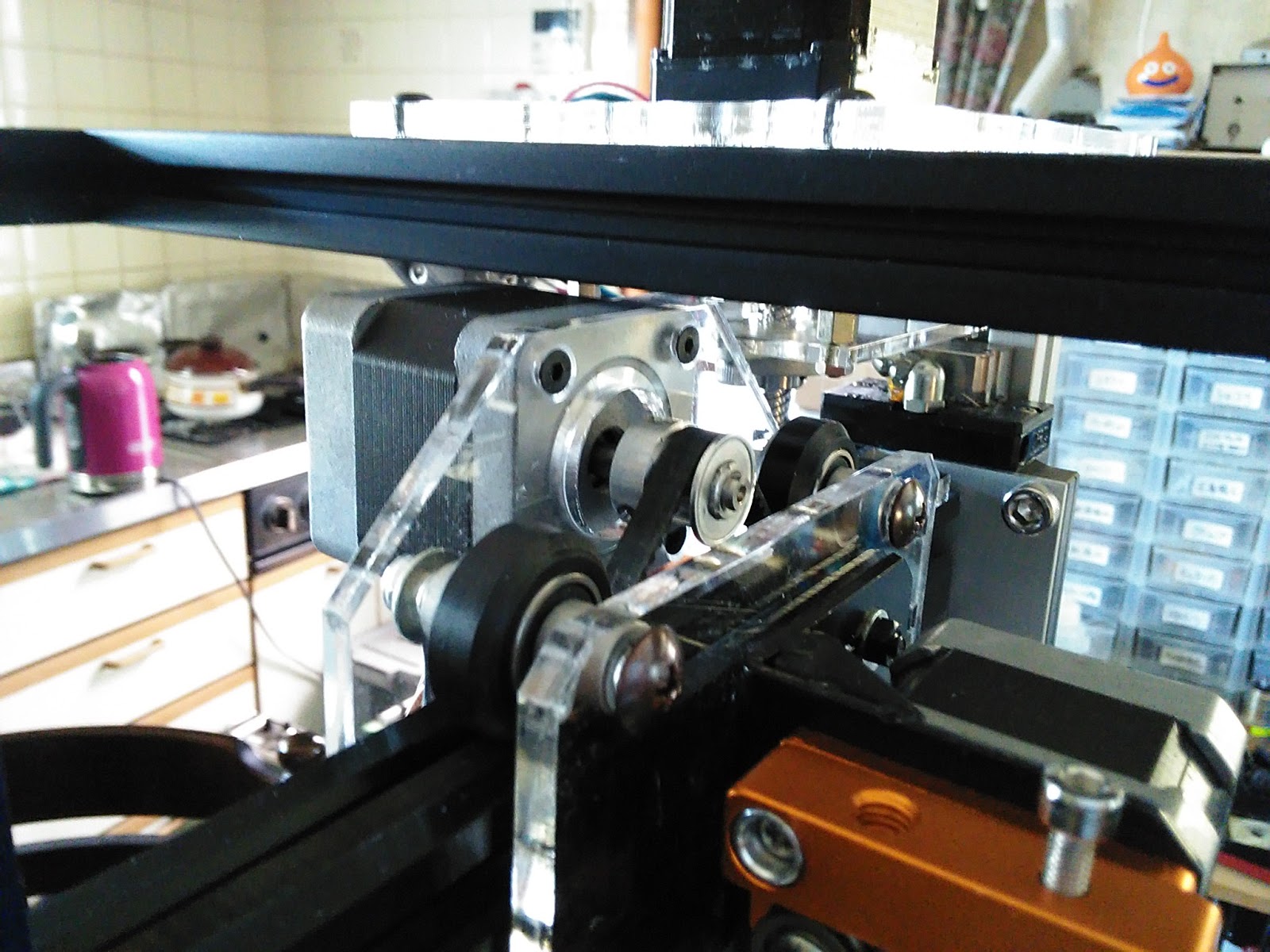
ベアリングブロック取り付けて、
カプラ入れます。
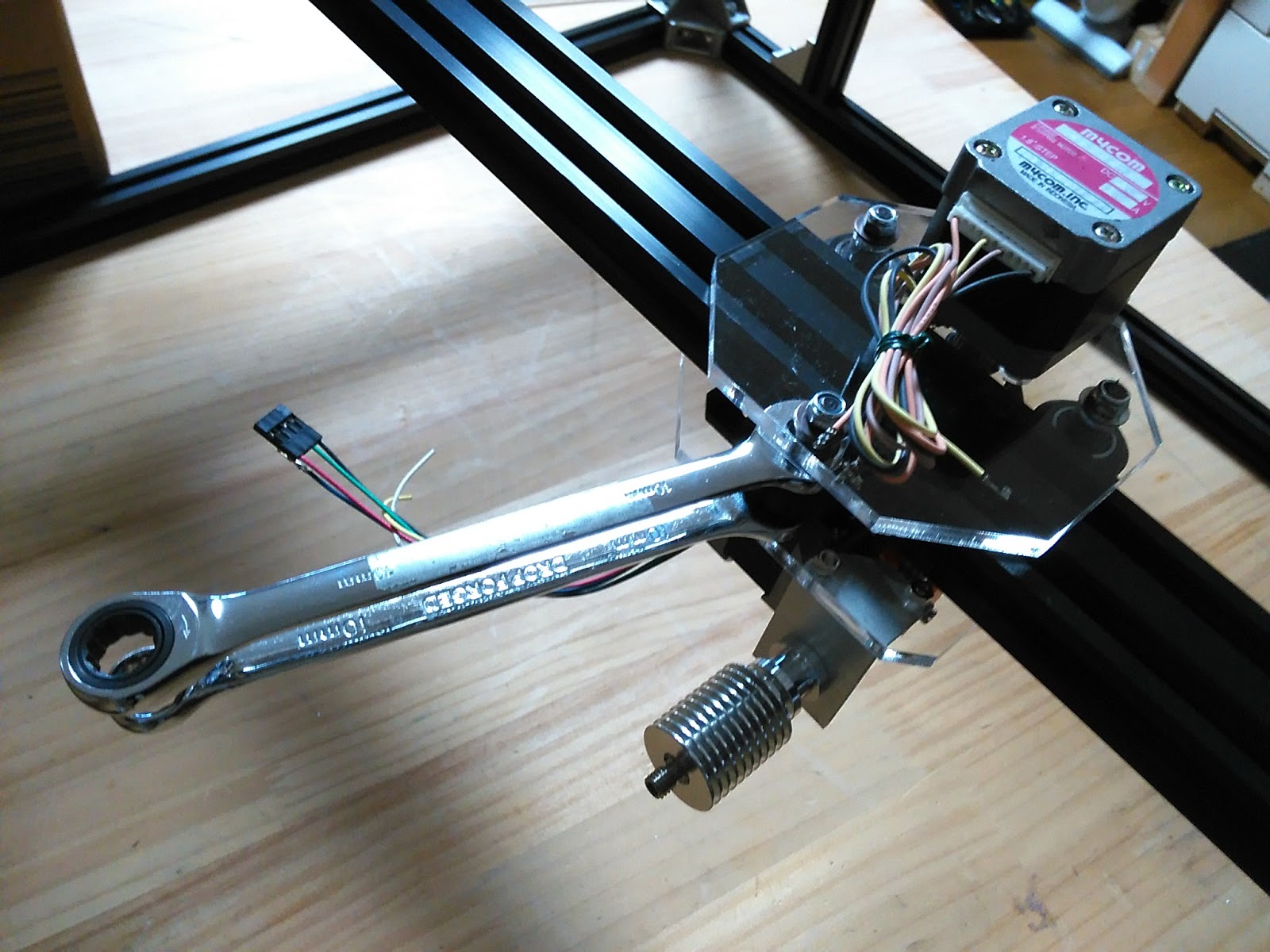
両軸のモータを使ったのは、こうやってつまみをつけると手で回しやすいからです。もし左右どちらかが脱調した時も手動でリカバリできる可能性があります。それに回っているのもわかりやすいです。
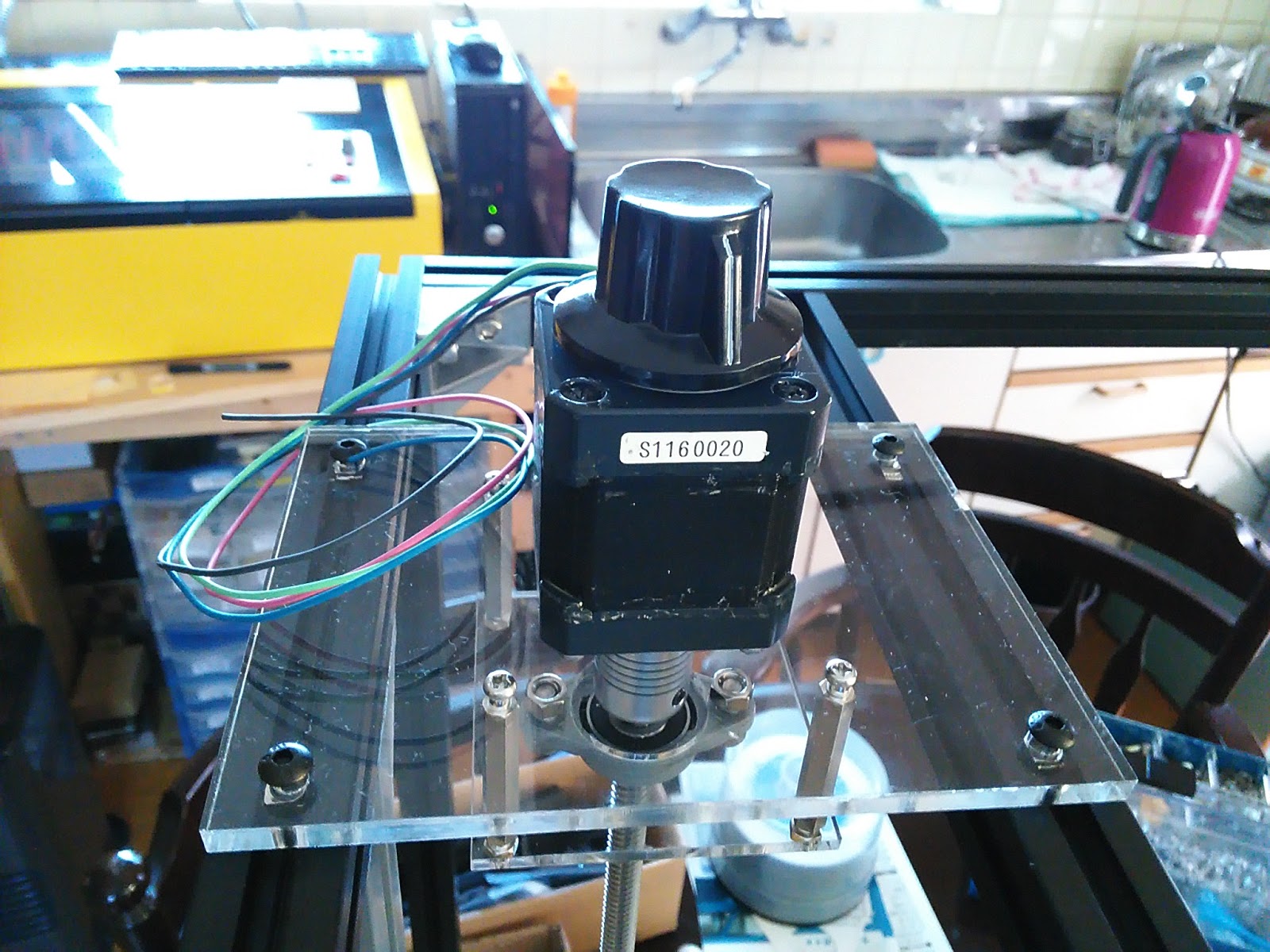
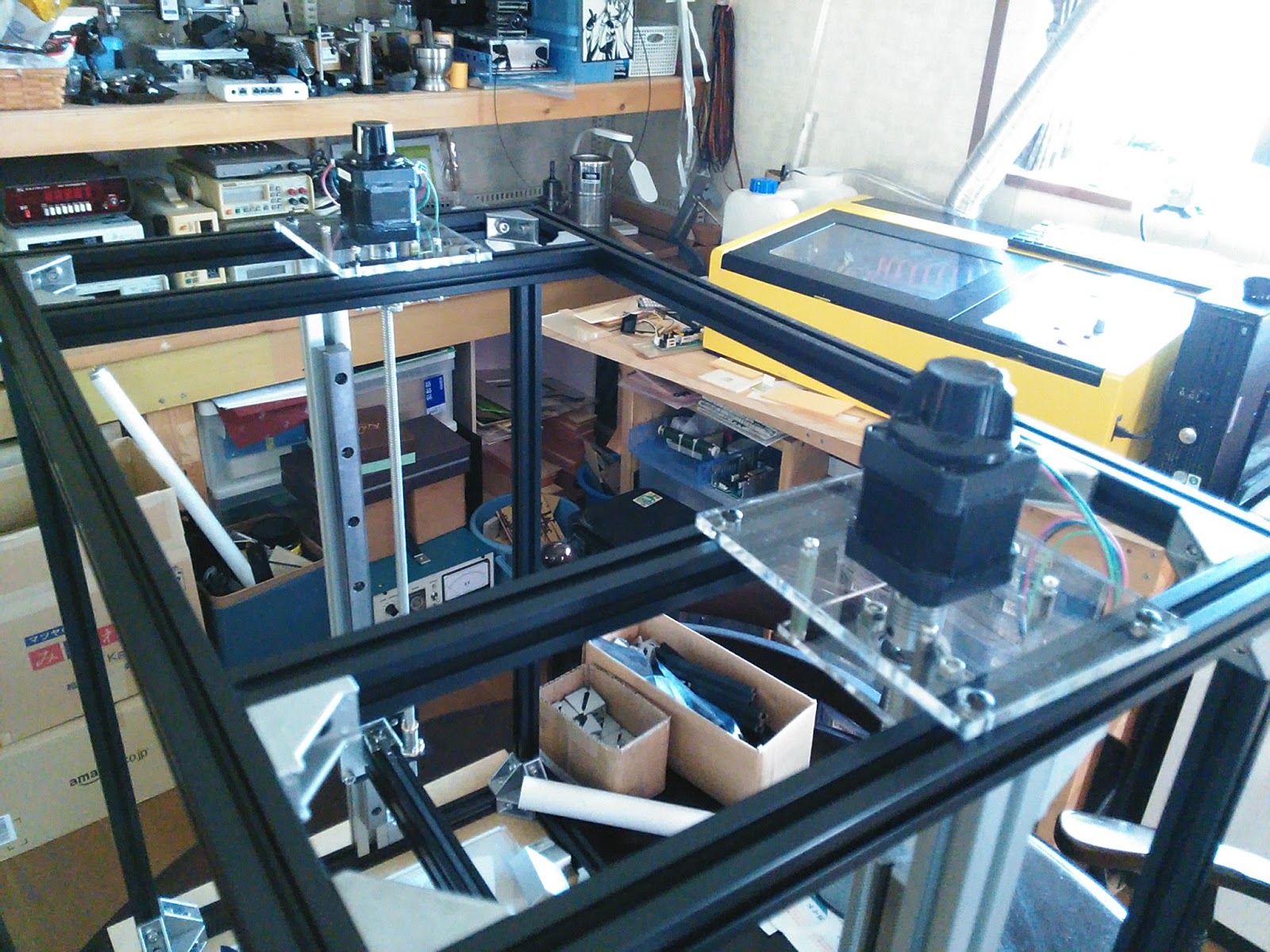
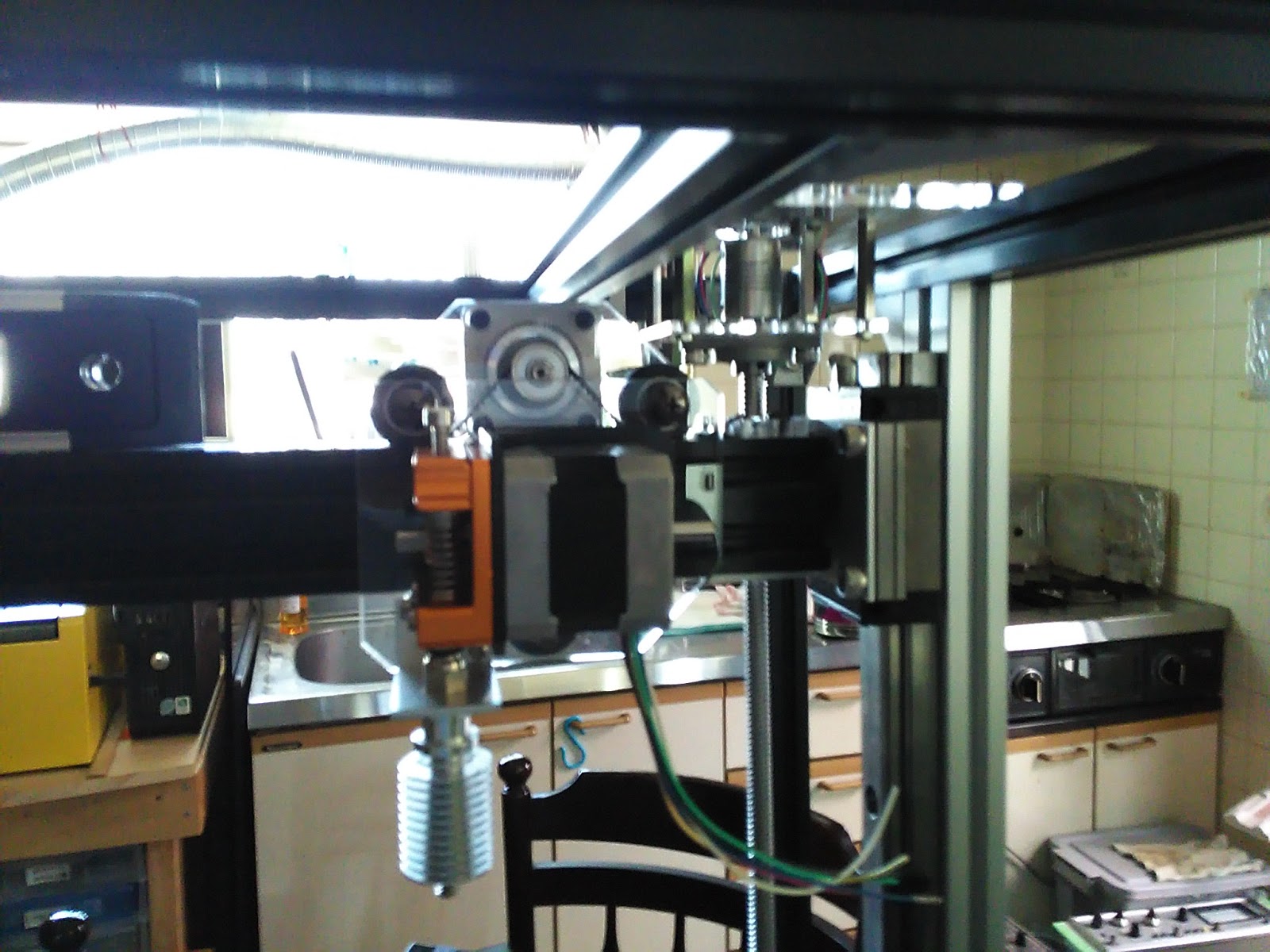
後ろから。
調整は後まわしにして、反対側も取り付けます。

つけました。
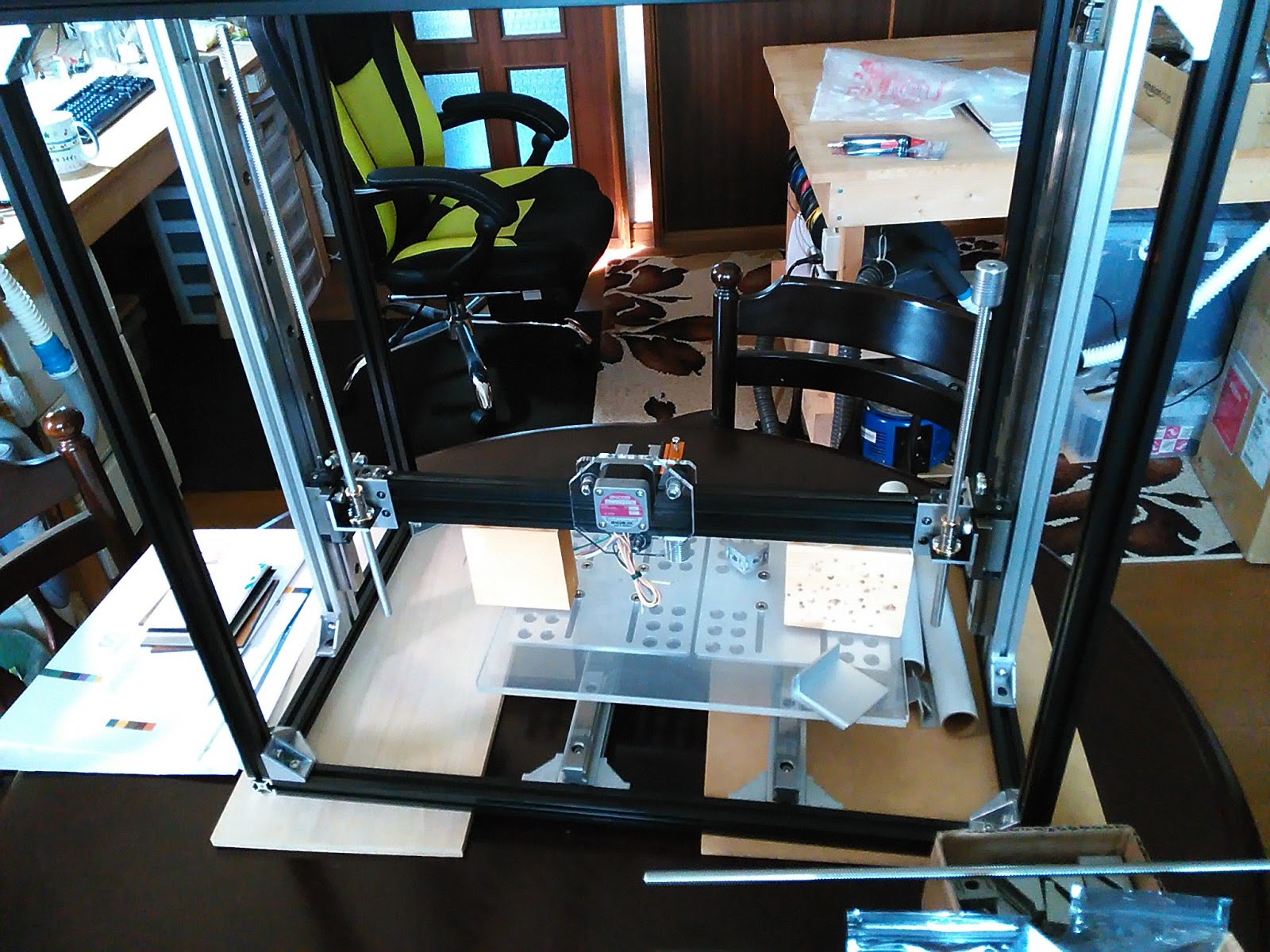
X軸を一番下に下げて、
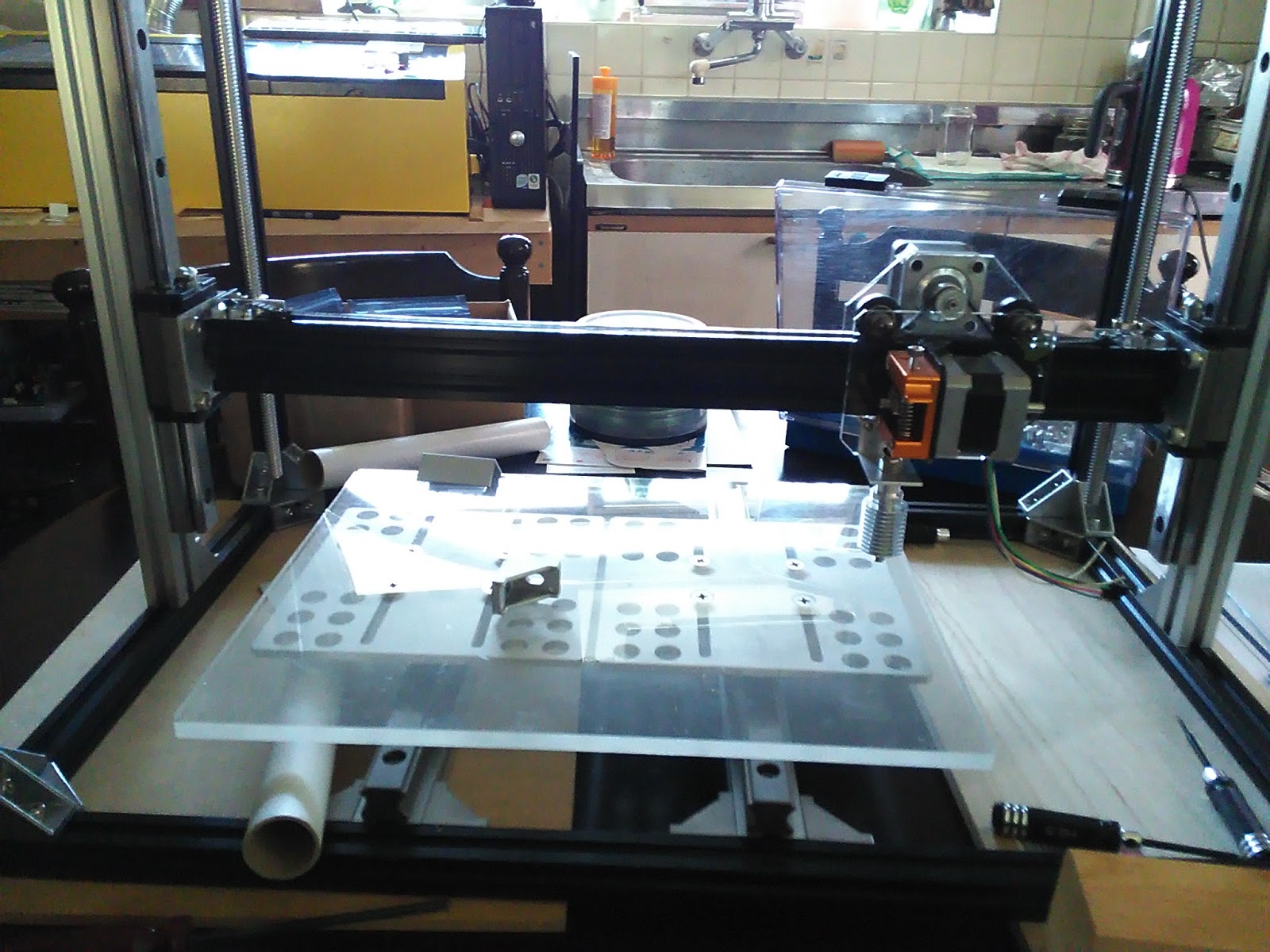
水平を出して、
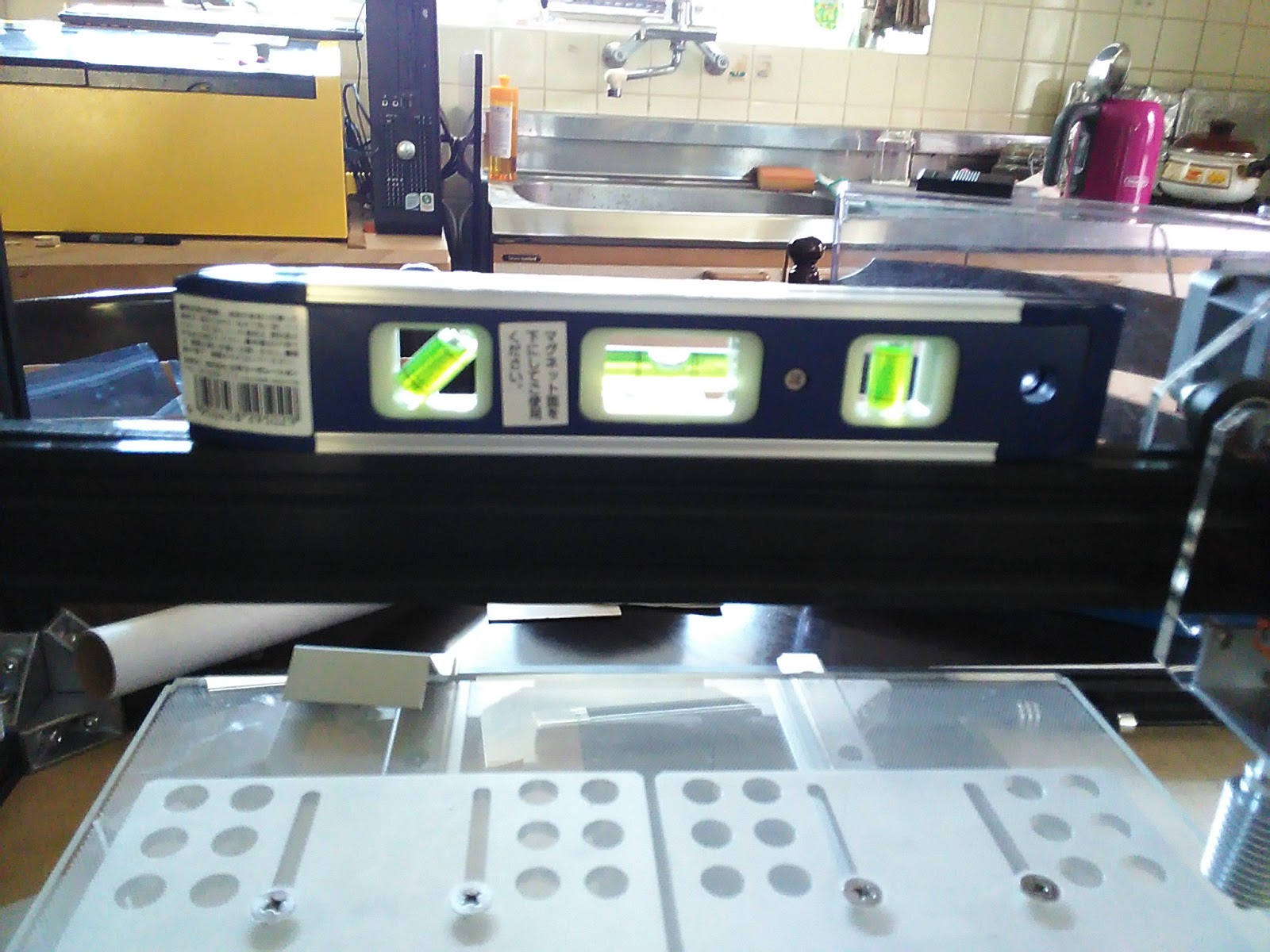
上いっぱいまで上げてみます(手動)
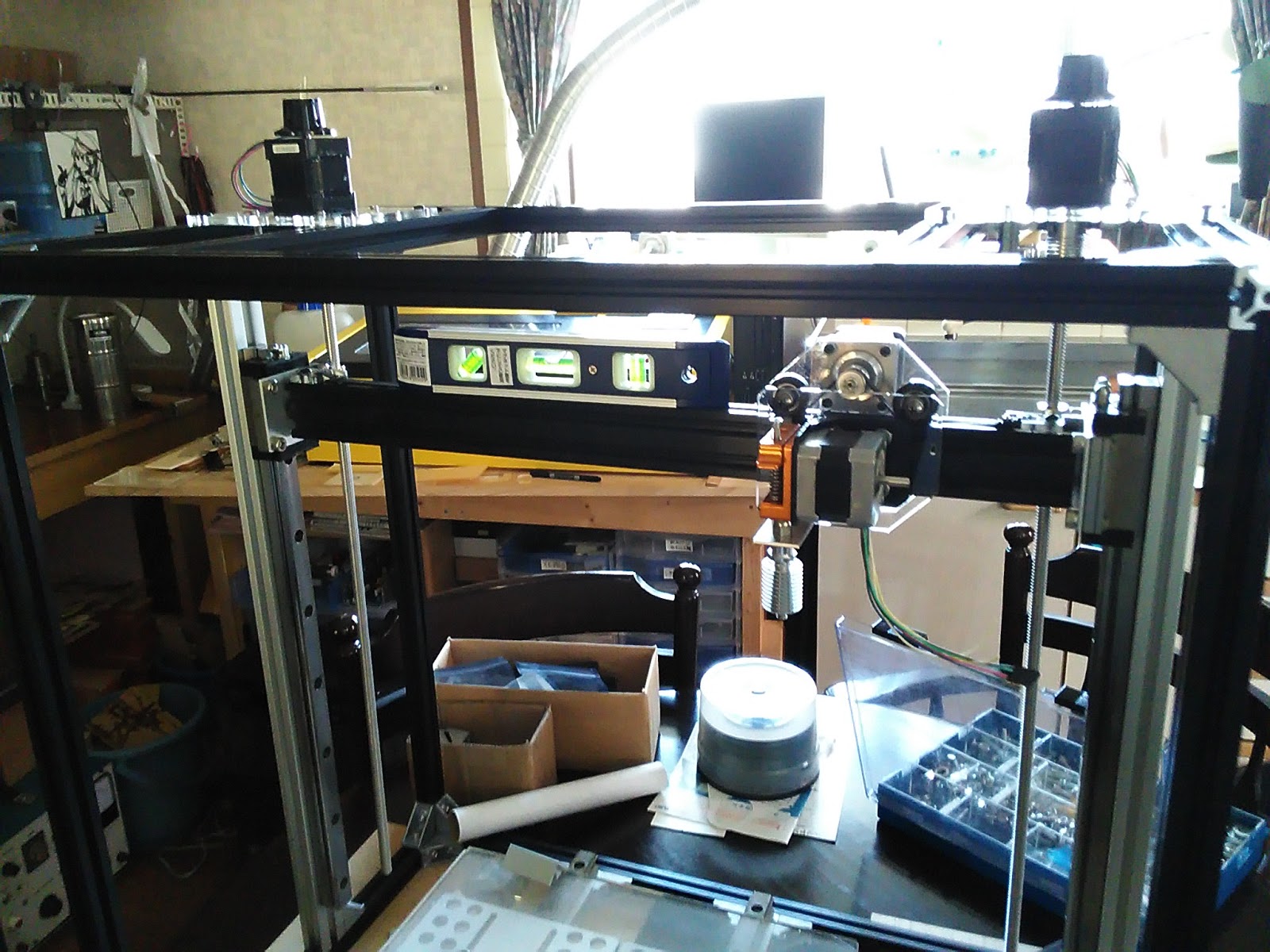
Z軸のストロークは350mmを超えそうです。目論見通り。

Z軸のリニアガイドの位置を再調整します。
ここまで上がります。ぎりぎり。
リニアガイドのストロークをほぼフルに使えます。リニアガイドのZ軸とY軸を交換しましたが、変更して正解でした。
この後両方の台形ねじの位置を再調整し、スムースに上下動できることを確認しました。
ひょっとするとブレーキがないとX軸が滑り落ちてしまうのではないかと心配していましたが、さすがにそんな精度は無いようです(笑 しっかりと待ってくれます。まあ、モータは軽く回るのでこのまま様子見をすることにします。
ここでキャリッジのエキセントリックナットも調整しておきます。まだ締めこんでなかったのです。
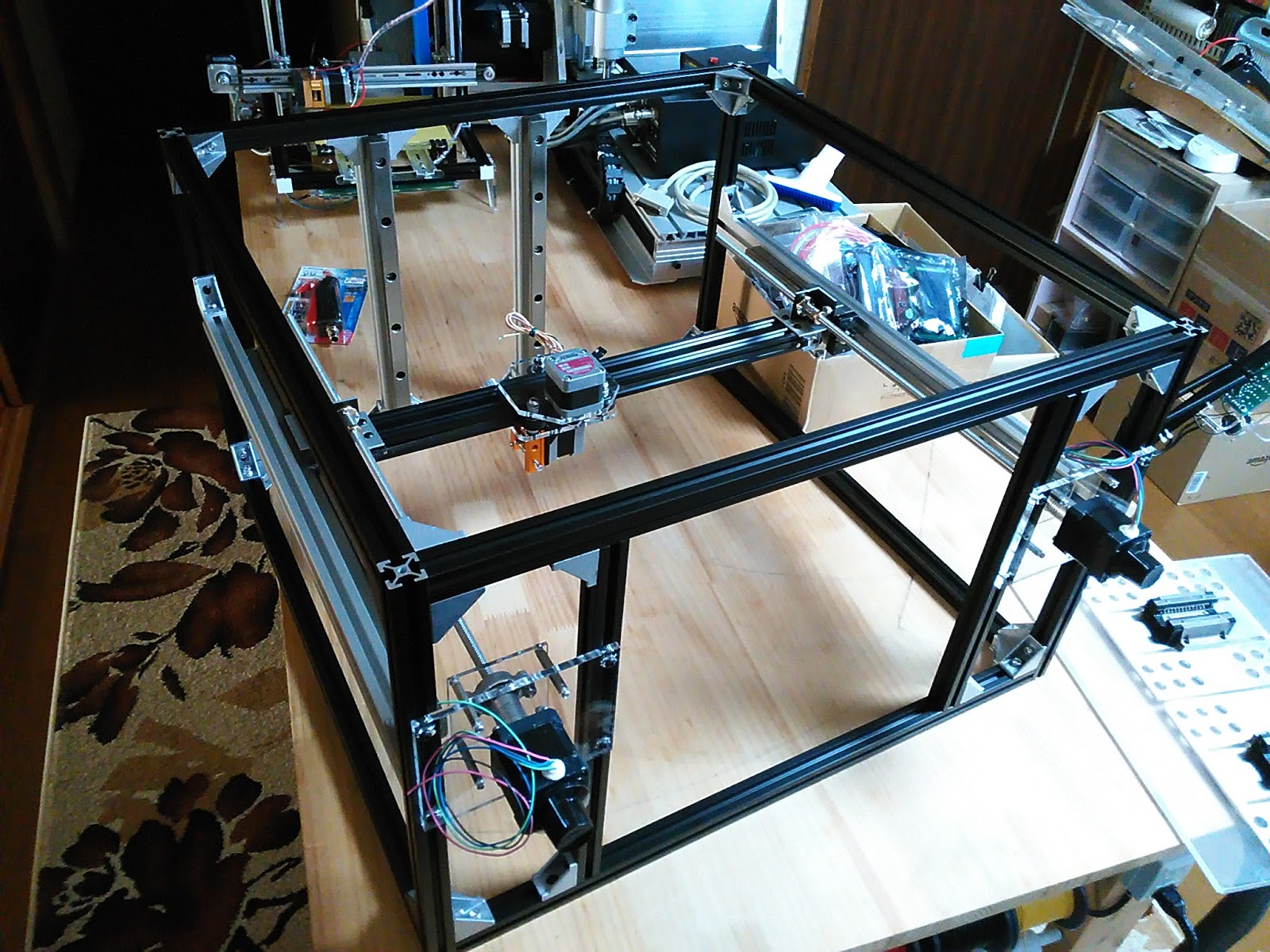
横倒しにします。しっかり作っているので横にしても何も問題ありません。このままでもプリントできそう。
エキセントリックナットはキャリッジの下の一輪に入れていますので、倒すと作業がやりやすくなるのです。
スパナ入れて、具合を見ながら少しずつ回して調整しました。
締めすぎるとキャリッジの動きが悪くなりますので、行ったり来たりしてしばし調整します。
とりあえずええ感じのところで留めていますが、ロックはされませんので定期的な点検が必要かもしれません。運用開始後に経過を観察することにします。
X,Z軸と駆動部分の組み立てが終わりました。残りはY軸です。
Y軸は簡単だと思って最後に回していたのです。いつも通りにステージ真ん中の奥にモータを置いてベルトをかけようと考えましたが、思い直しました。
今のフレーム構造とステージの関係は「非動作時はステージがフレーム内に収まっているが、動作時には造形物のサイズによって前後に出てくる」ようになっています。
動作しないときには前後方向には飛び出しはありません。がしかし、いつもの位置にモータをつけると、前か後ろにモータマウントを飛び出させないといけません。そうしないとストロークが稼げないのです。なんかかっこ悪いなそれ。
…ということで、しばし考えてこんな構造を試してみることにしました。
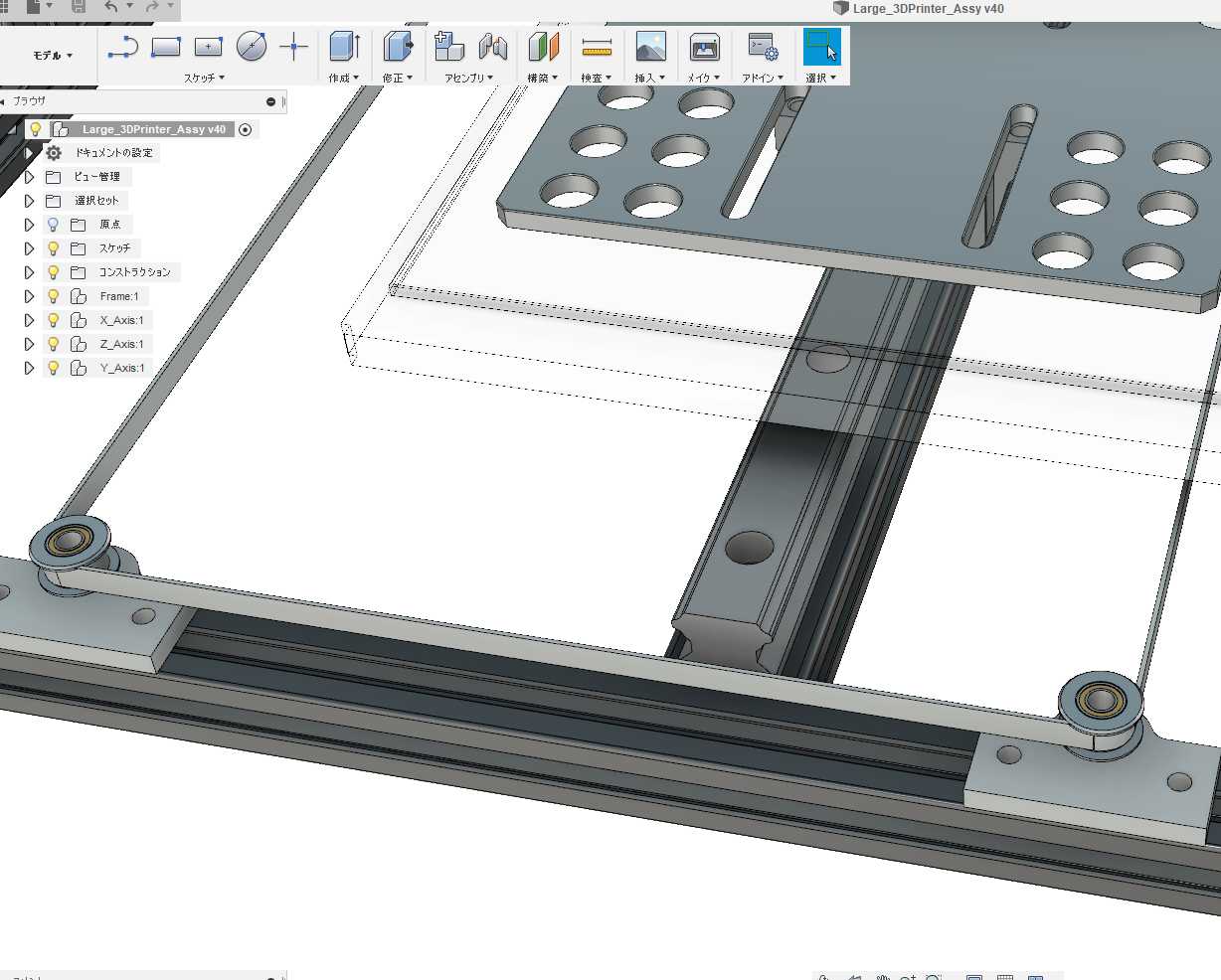
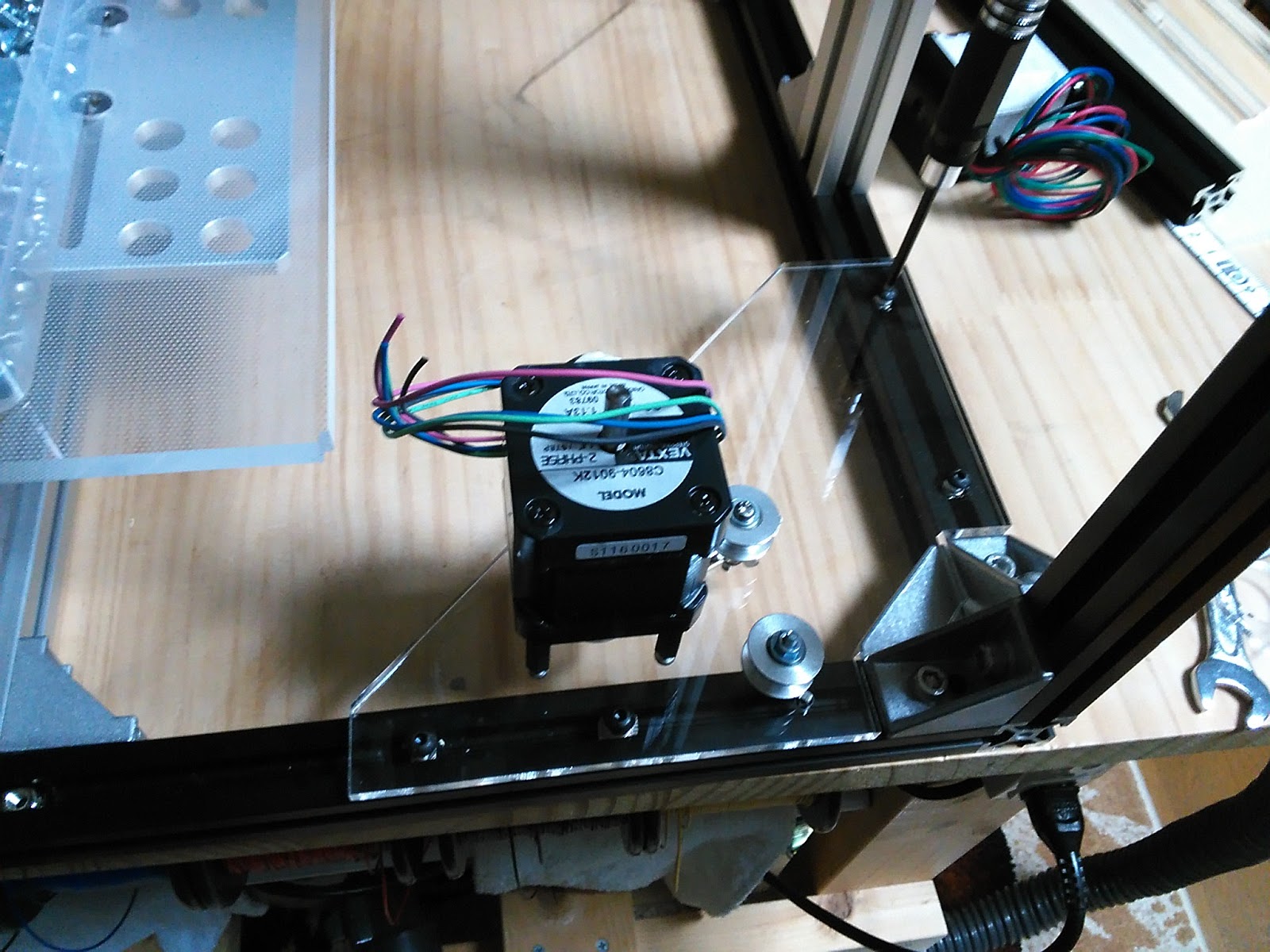
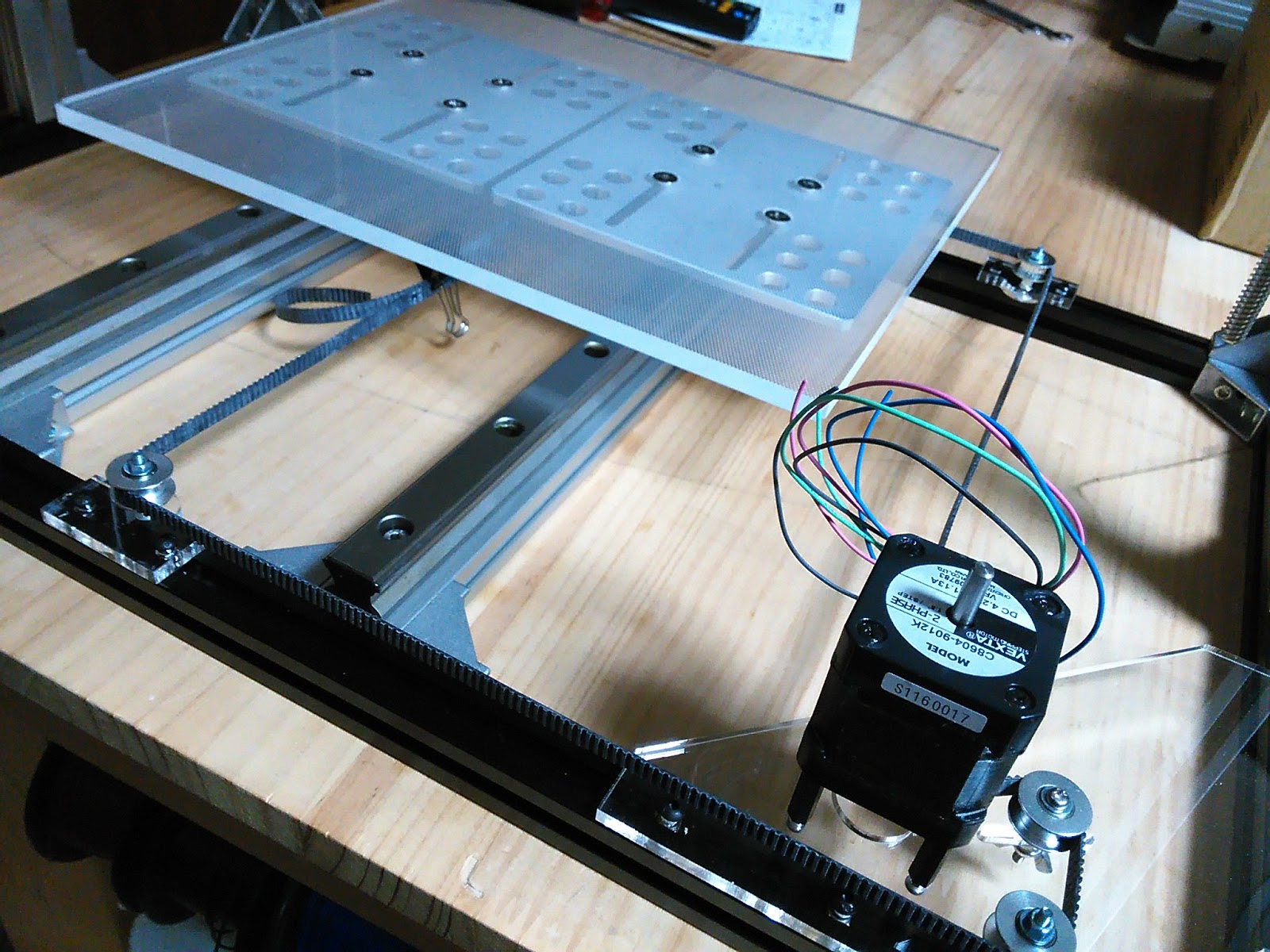
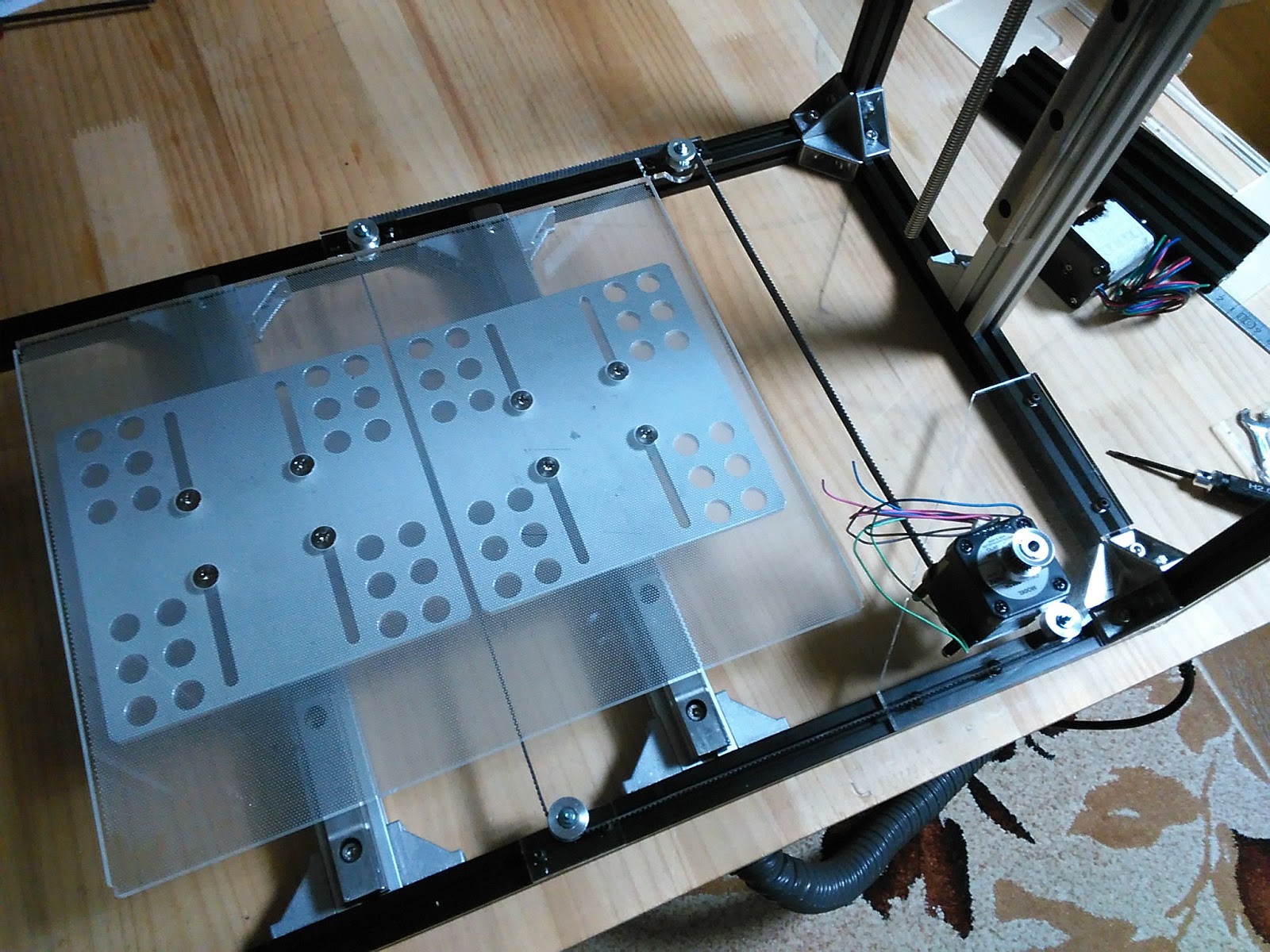
ホットエンドがキャリッジの中心から左にずれている関係で、ステージはフレームの中心から左にオフセットされています。この右側の空いた空間には制御系を入れるつもりなのですが、モータおいても余裕です。
ということでこんな配置にしました。
わかりますかね。フレームの辺の上をベルトが這いまわりますが、モータはフレーム内に収まります。プーリーが多くて駆動が重たくなるような気がしますね。この辺りは実験してみないとわかりません。
トルクが足りないときにはモータをハイパワーな奴に交換すればいいので、なんとかなるやろと思いまずはやってみることに。
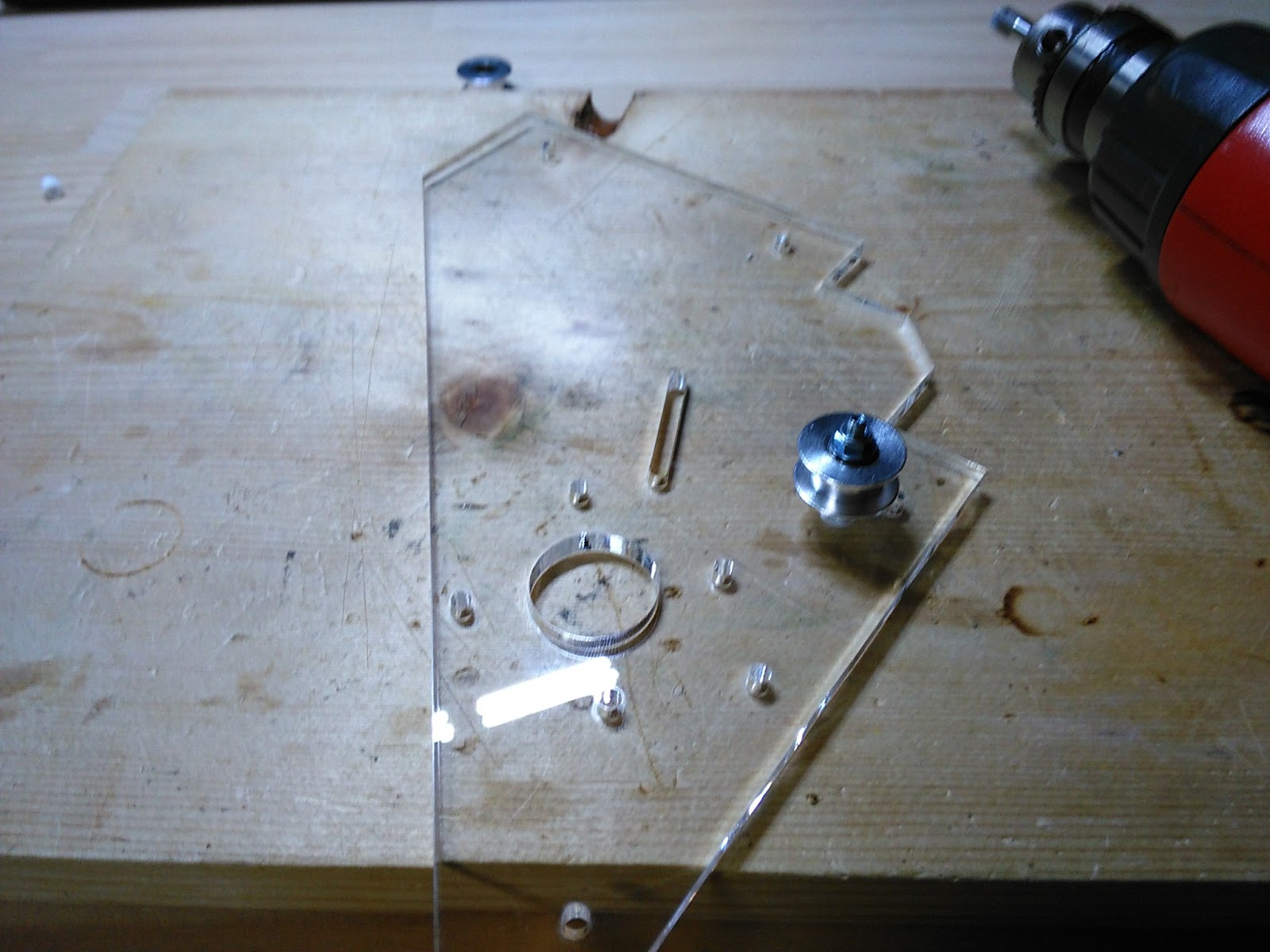
設計からdxf抜いてレーザ加工機で切り出します。この部分も力がかかりますので5mmの板を使用。端材のサイズで切り出せるように形状を工夫しました。
必要なところにざぐり加工します。

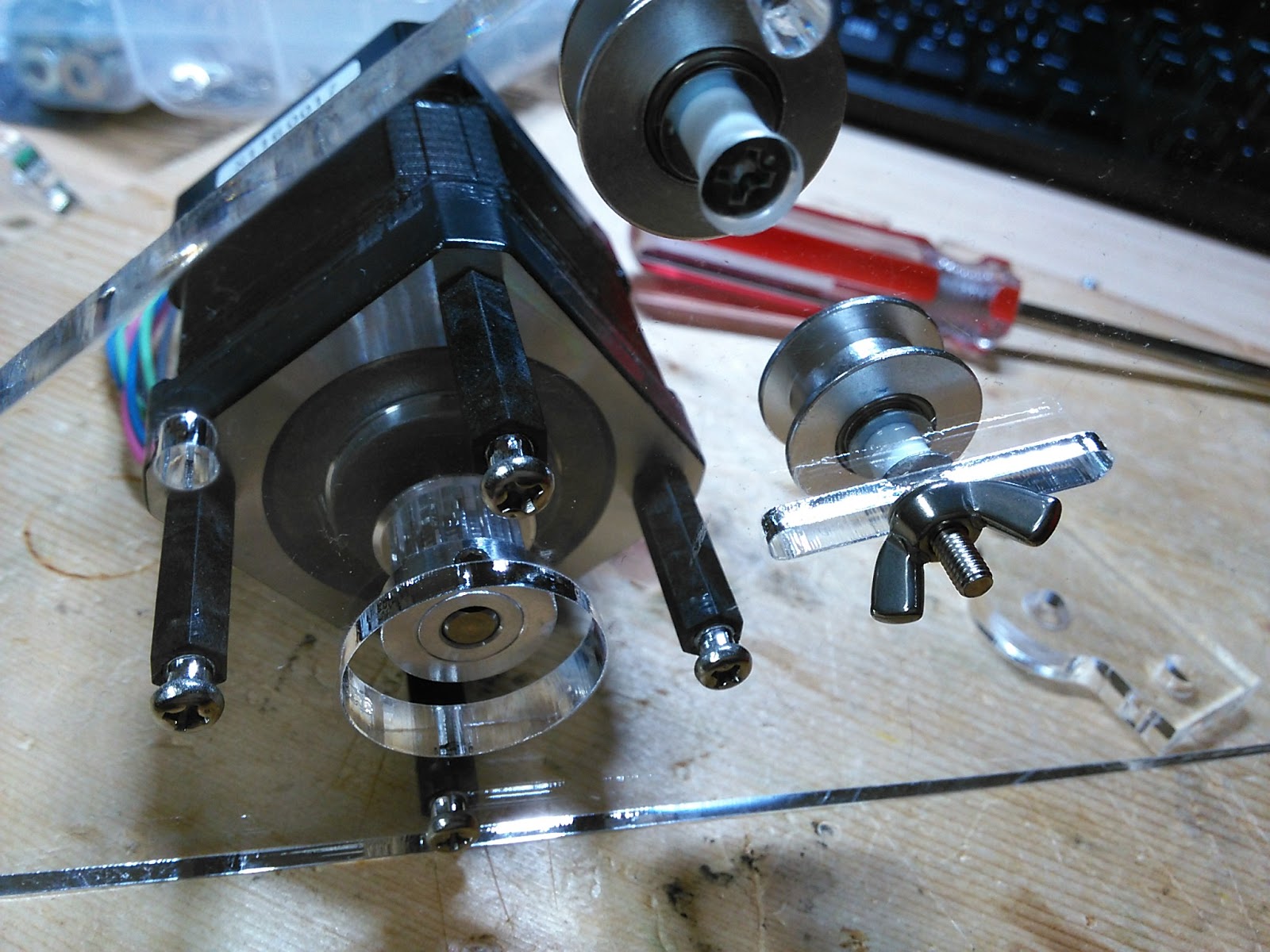
プーリーの取り付けはいつも悩ましいのです。プーリーについているベアリングの穴径は5mmです。なので、5mmのねじで受ければよさそうなものですが、通常のM5ねじではガタが出ます。ネジ山加工がしてあるためでしょうか、M5ねじの外径は5mmよりほんの少し小さいものばかりです。ので、M5ねじで留めると誤差が出るのです。今回のようにプーリーが多いと誤差も無視できなくなる可能性があります。
ということで、しばし考えた結果、今回もアレが活躍しました。

お子様大好きアイロンビーズです。
このアイロンビーズ、外径がジャスト5mmなのです。しかも内径は3mmよりほんの小さめでM3ねじにしっかり食いつきます。
そんなアイロンビーズを下の写真のようにワッシャを挟みながら入れて、
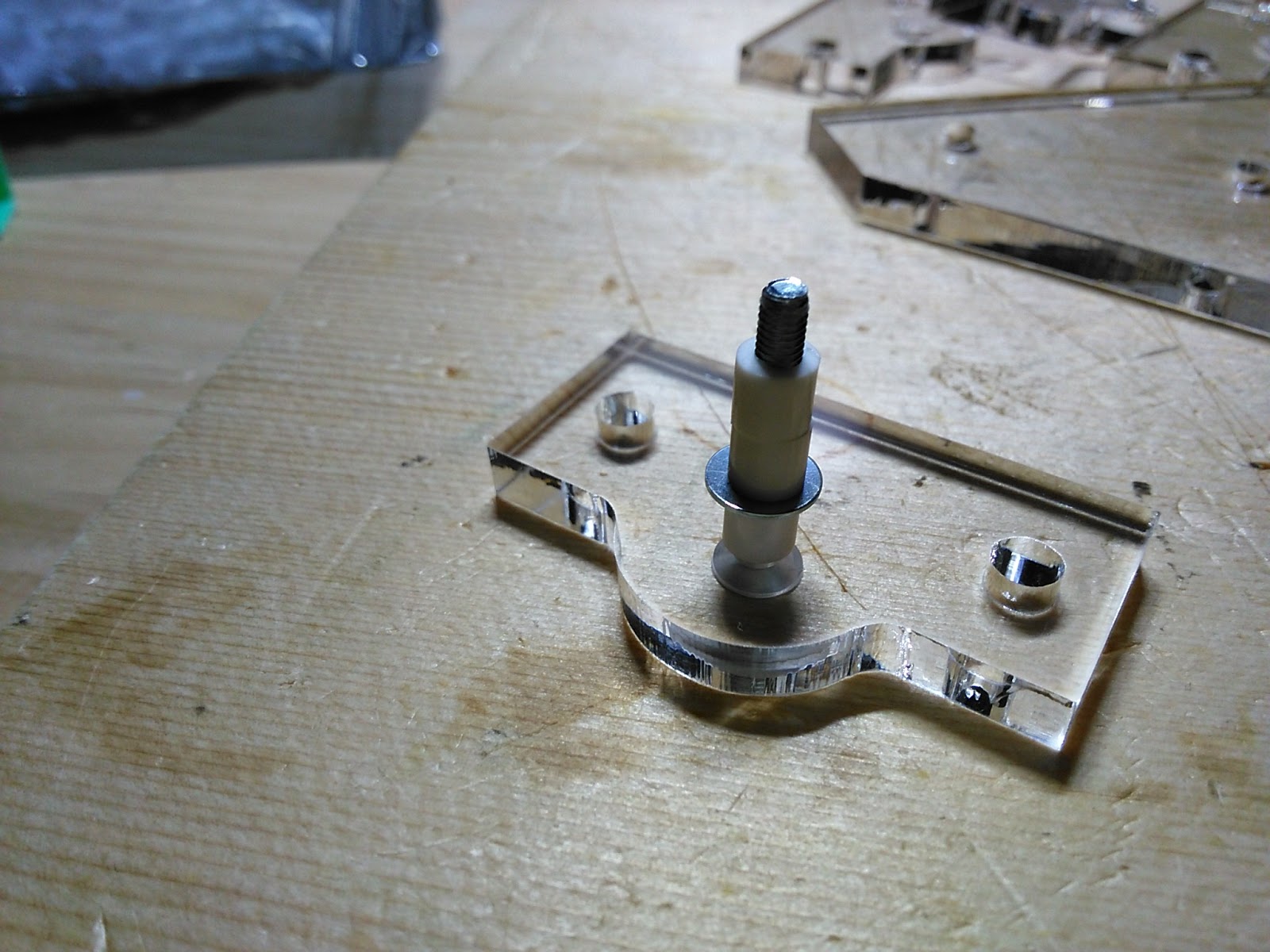
プーリーを入れます。全くぐらつきません。
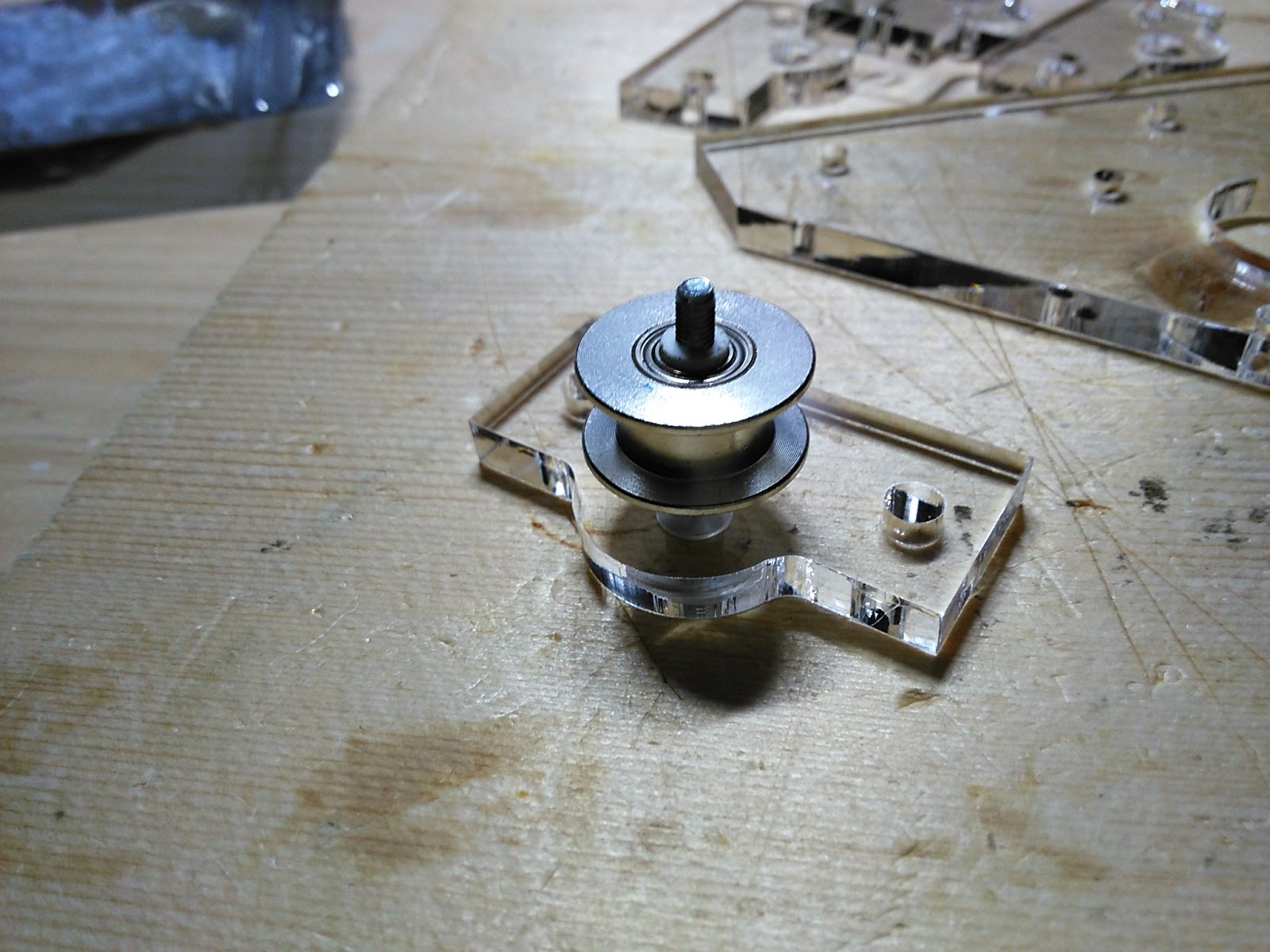
さらに素晴らしいことに、この状態で上にもう一枚ワッシャをかませてナットで締めこむと、ビーズが押されて若干外に膨らむため、わずかに残っていたプーリー内側とビーズの間の隙間が完全に埋まるのです。これ素晴らしすぎ。

こんな感じでプーリーを使うことにします。
なお、写真では下段(写真に見えている白い部分)までビーズを使っていますが、ここにビーズを入れるとこのビーズも締め付けによって外に膨らむためNGであることが分かりました。ので、一度ばらして下段だけは金属のスぺーサーに変えています。これで完璧になりました。

取り付け後の写真ですが、わかりますかね。
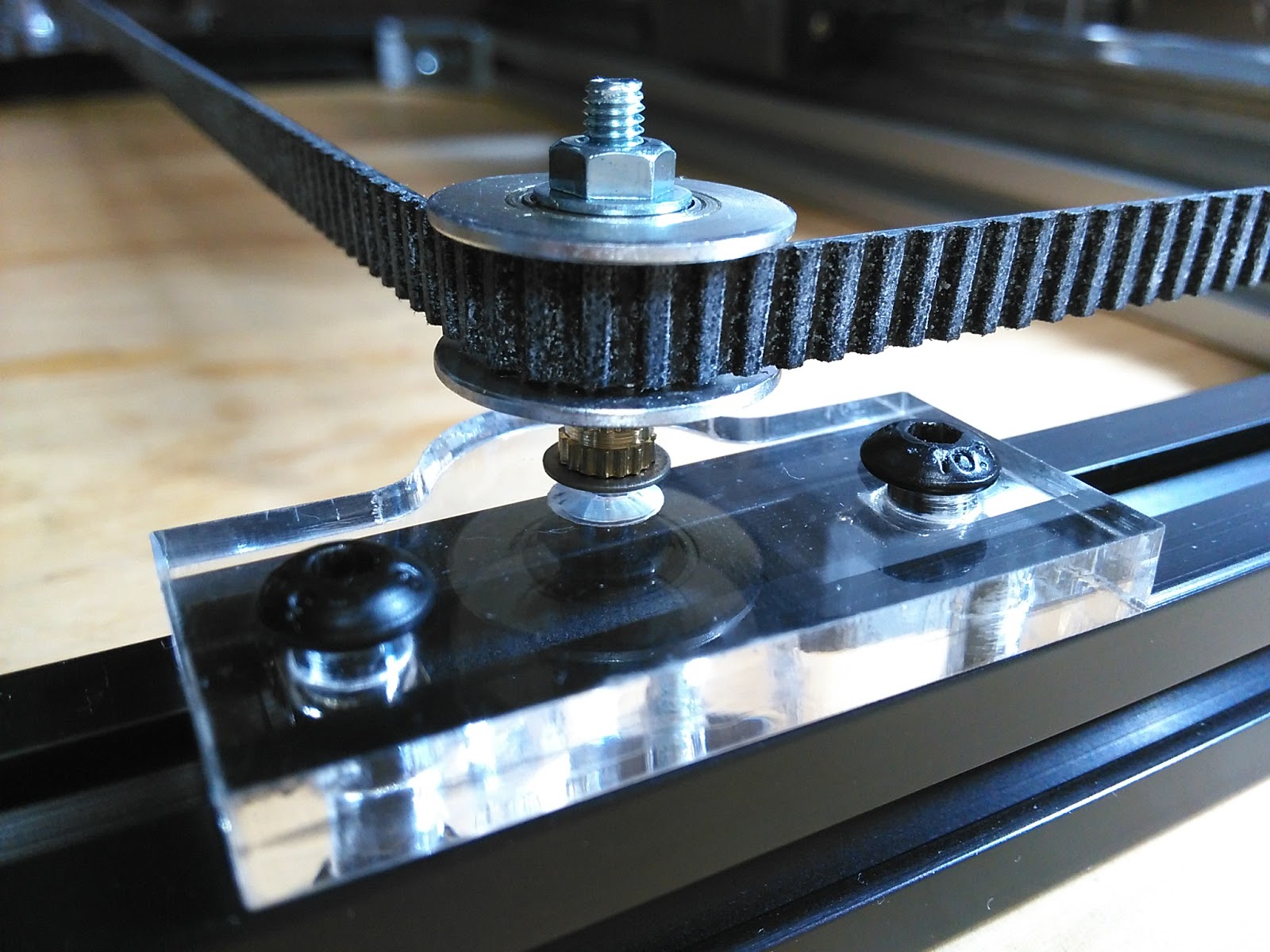
ちょうどよい長さのスペーサがなかったので、M4用のインサートナットを使っています。
強度的には十分のようです。
組み立てに戻ります。
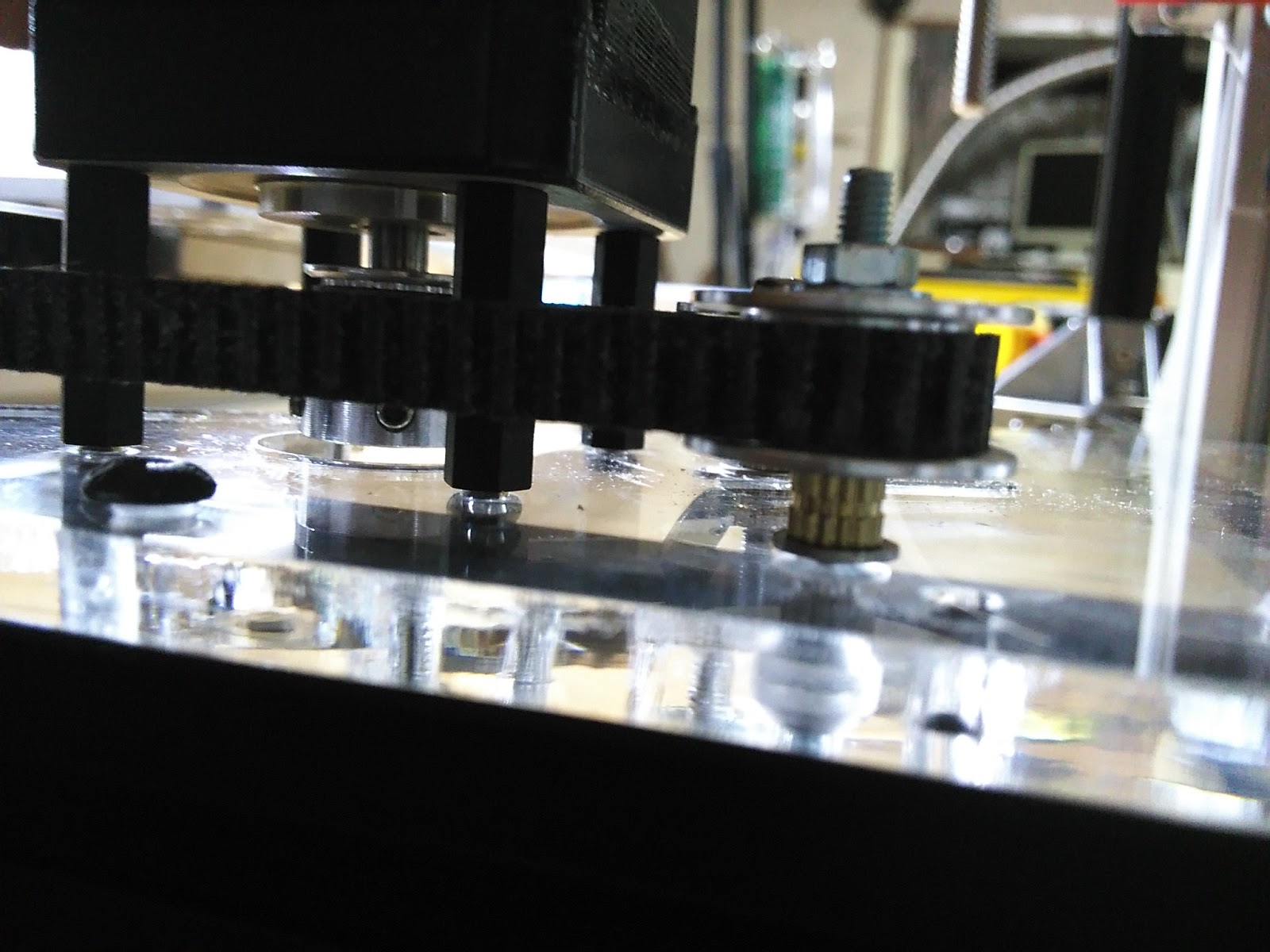
モータマウントのプーリーも上の写真と同じ構造にします。
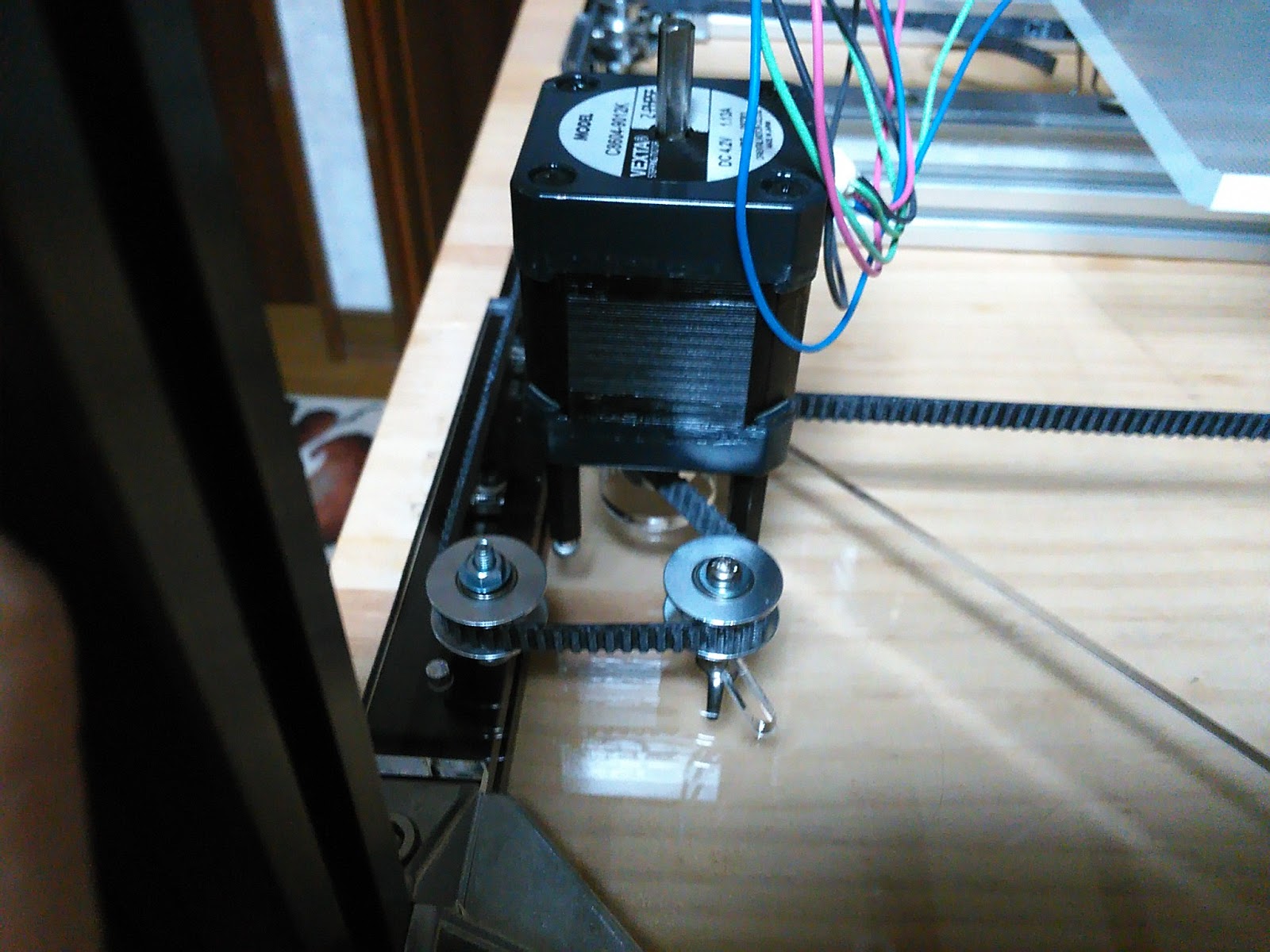
モーターには20mmのスペーサを入れて逆立ちさせます。こうすることでベルトの高さが合うのです。
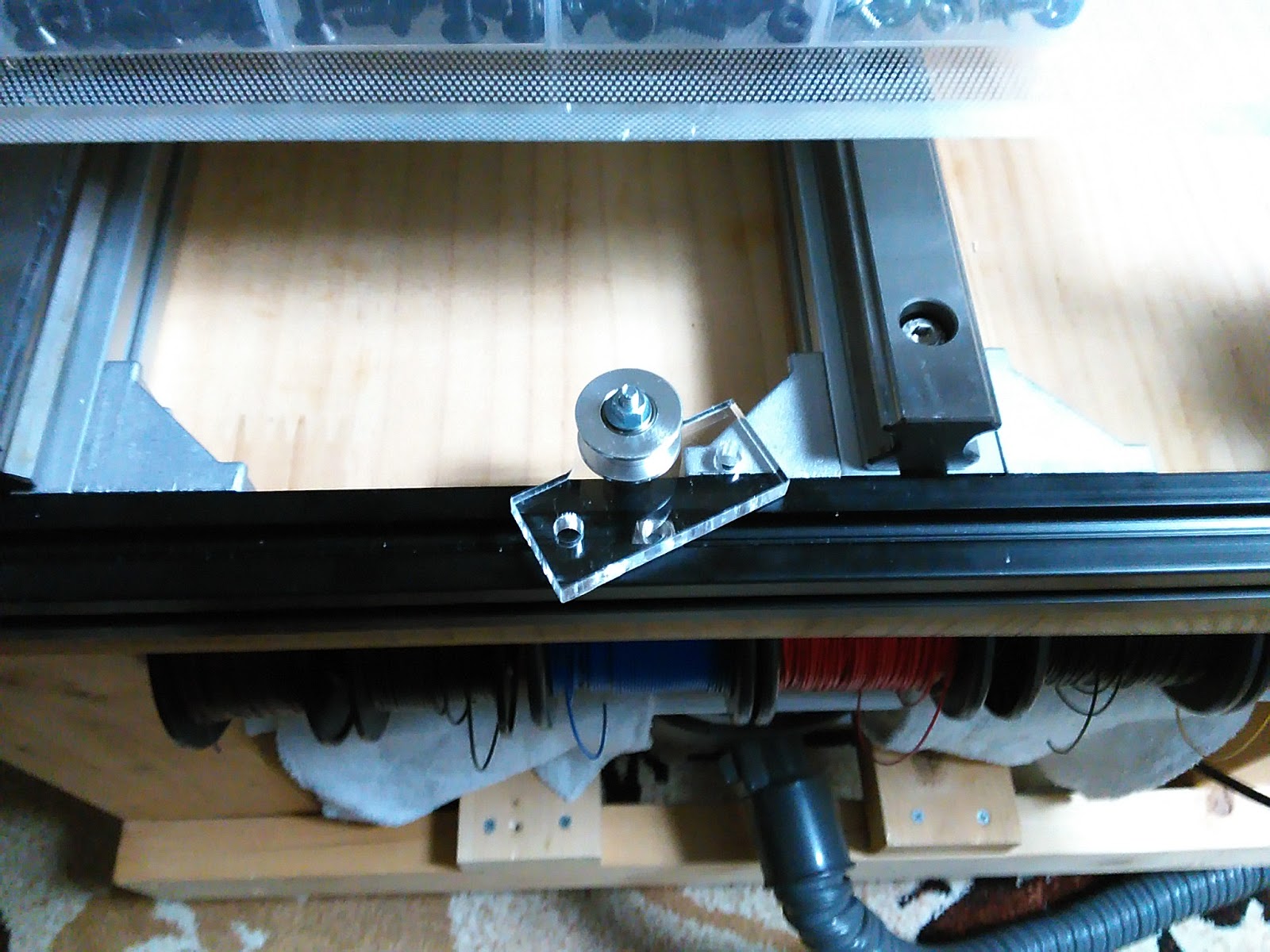
モータマウント近くのプーリーの一つは、このようにスロットに取り付けています。
ベルトを掛けてから、スロットを使ってプーリーを動かしてベルトの張りを調整できるようにしているのです。
このマウントをフレームに固定します。後入れナットが大活躍します。最初からこんなこと想定してナット入れとくとか、完全に設計が終わってから作らない限りまず無理です。
ほかのプーリーも固定していきます。
とりあえずこんな感じでいいでしょう。

ベルト掛けていきます。
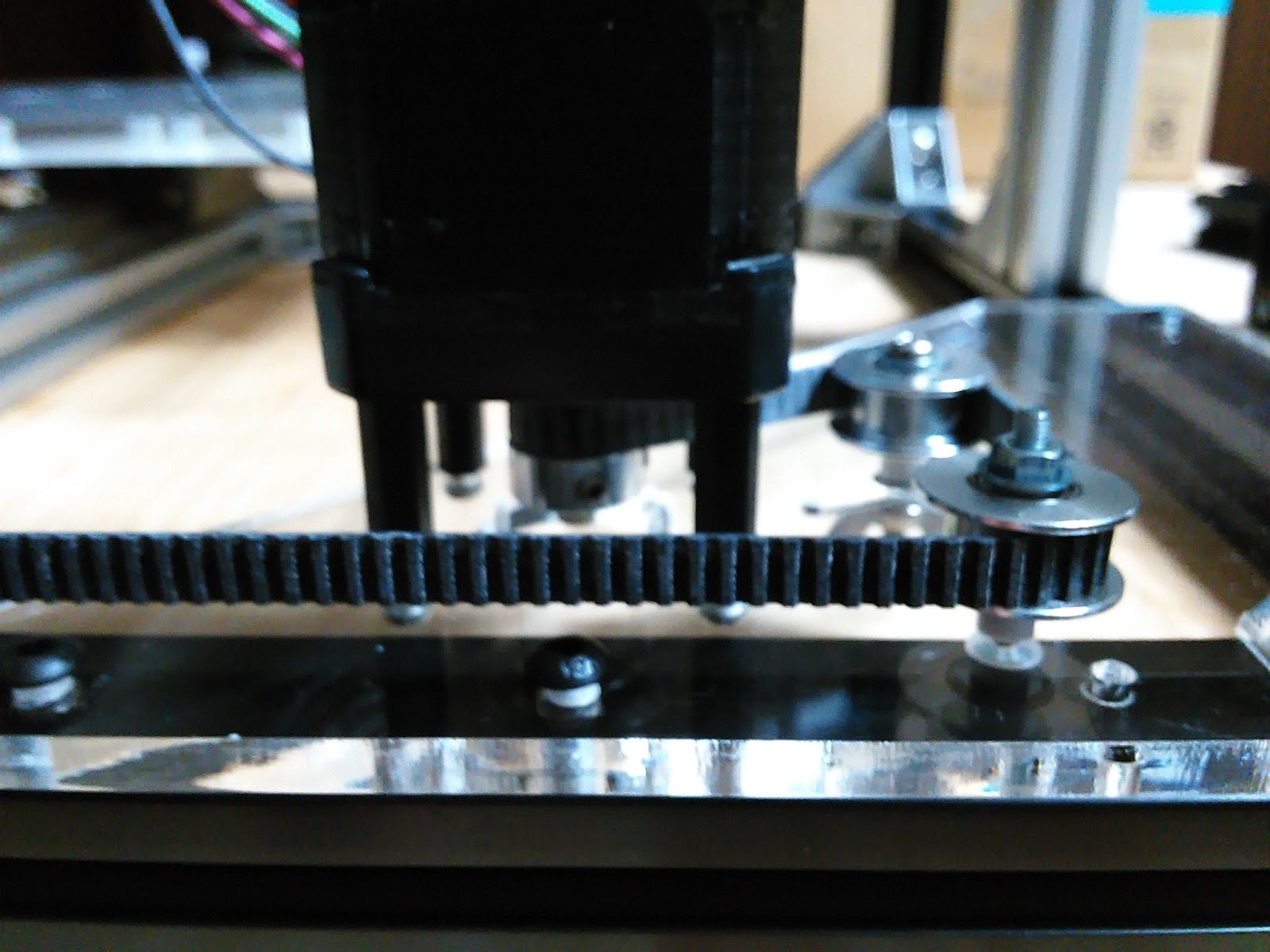
ベルトを曲げている部分が多いように思いますが、モーターのタイミングギアにベルトがかんでいる距離を稼いでおきたいのです。
ベルトの端をクリップで留めてループを作って動きを見てみます。まだステージには掛けていません。ベルトが空回りする状態でテストします。
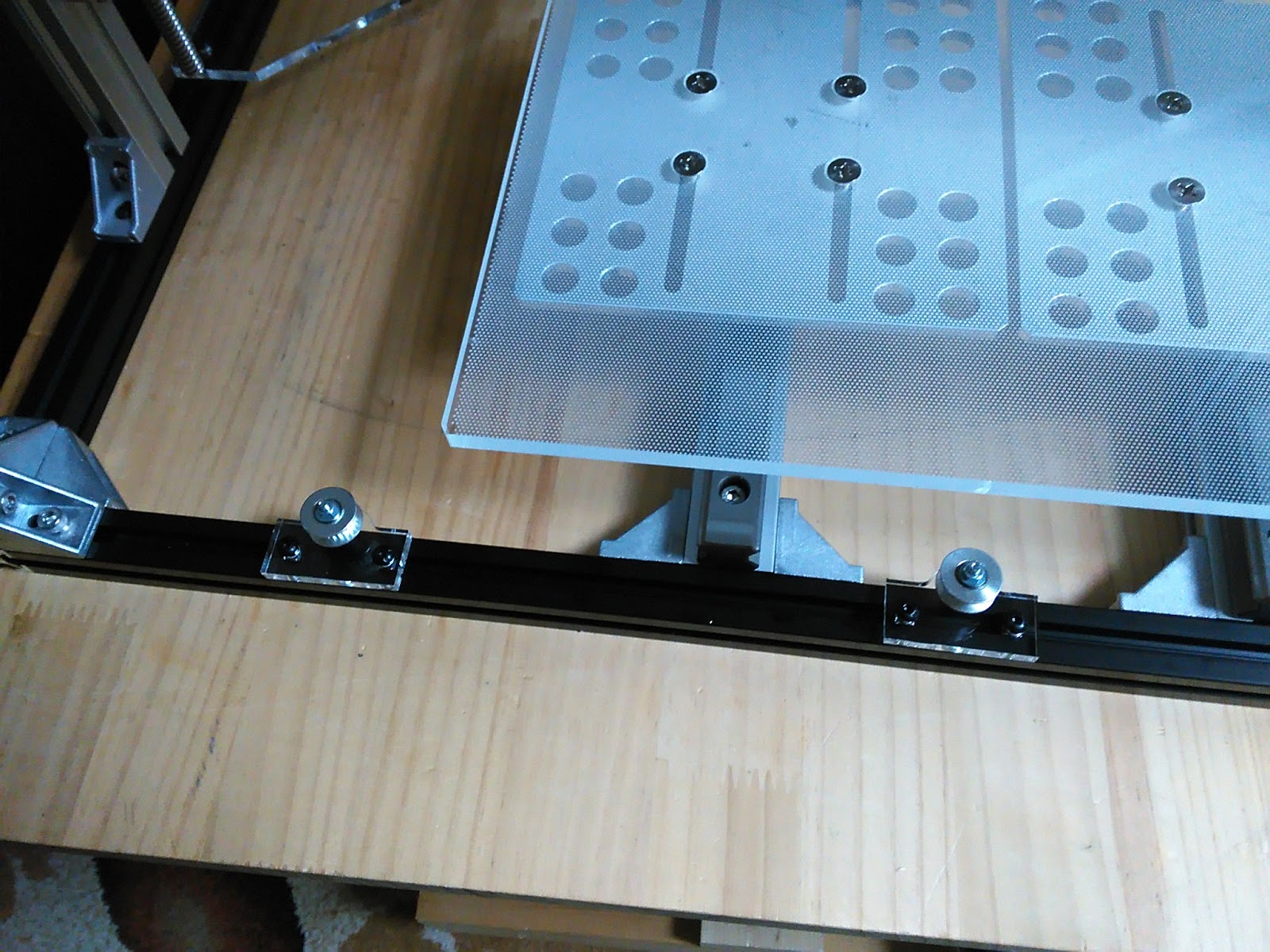
プーリーの位置を調整して、ステージ中央の真下を前後方向に一直線に通過するように位置出しをします。
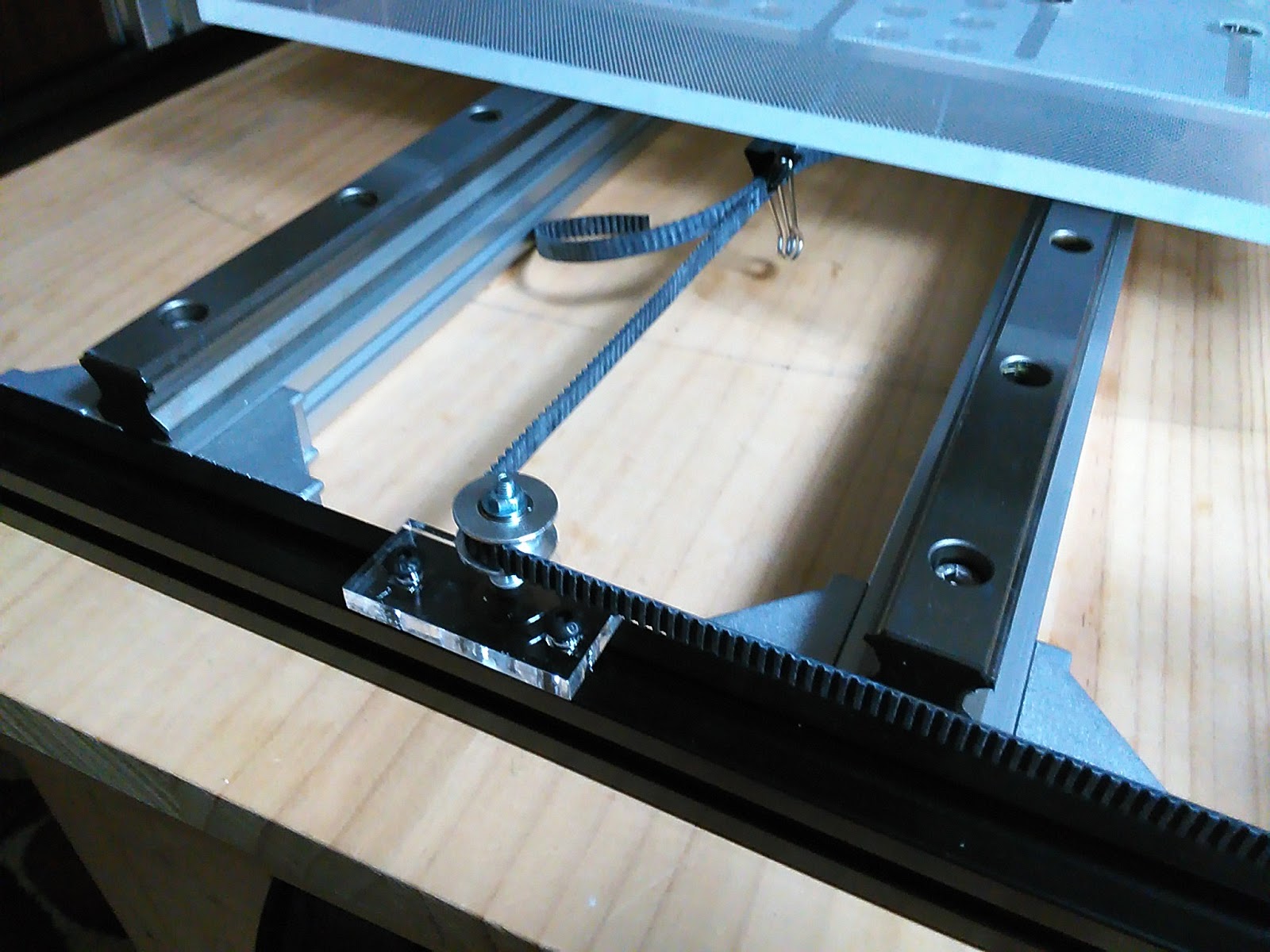
この部分はベルトが良く見えるところなので、フレームと平行に走るように奥のプーリー位置を決めます。これは美観の問題。

位置が出ました。きれいな配置です。
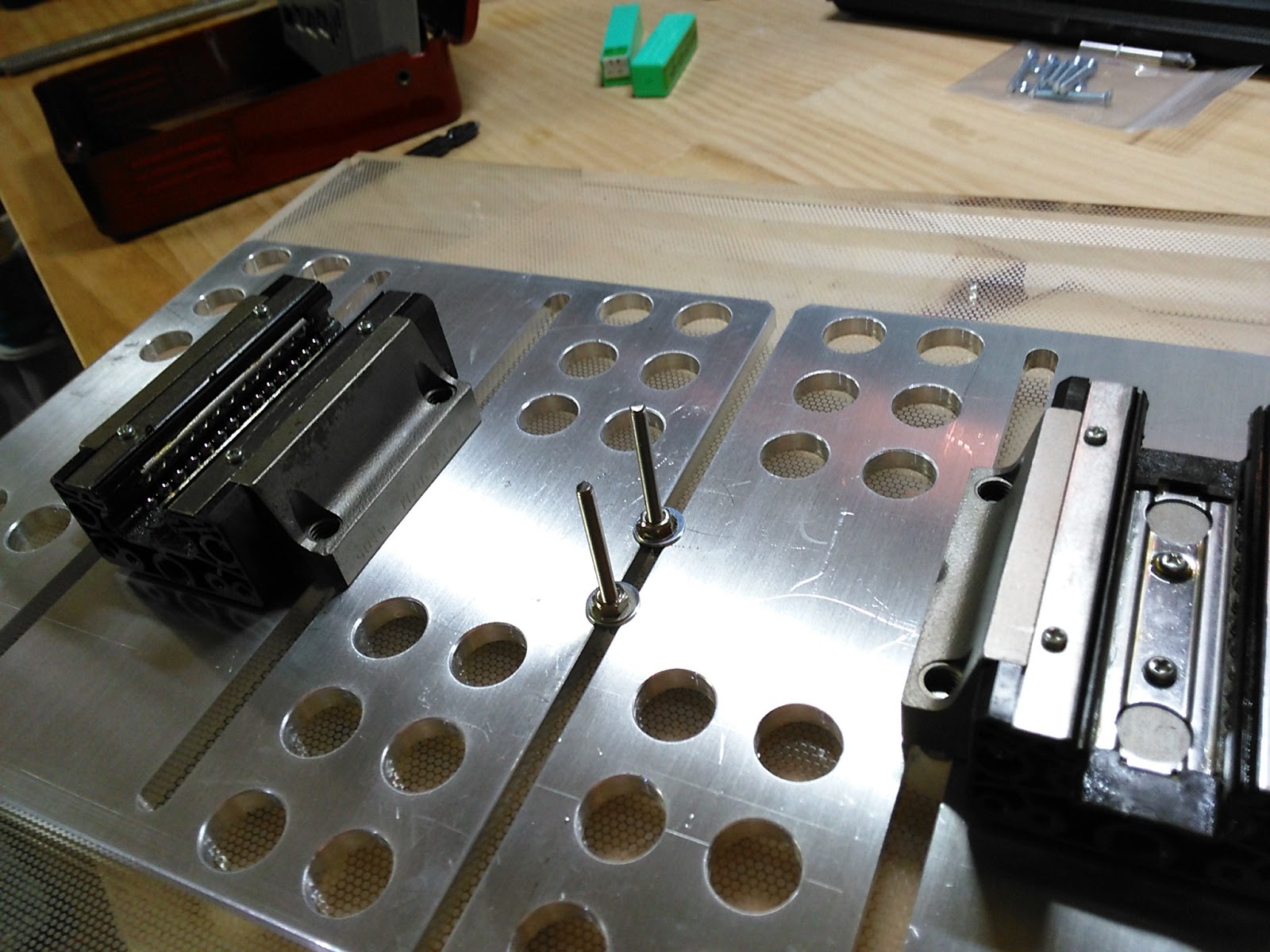
ステージにベルトを掛けていきます。ステージ中央にM3穴を二つ開けて、
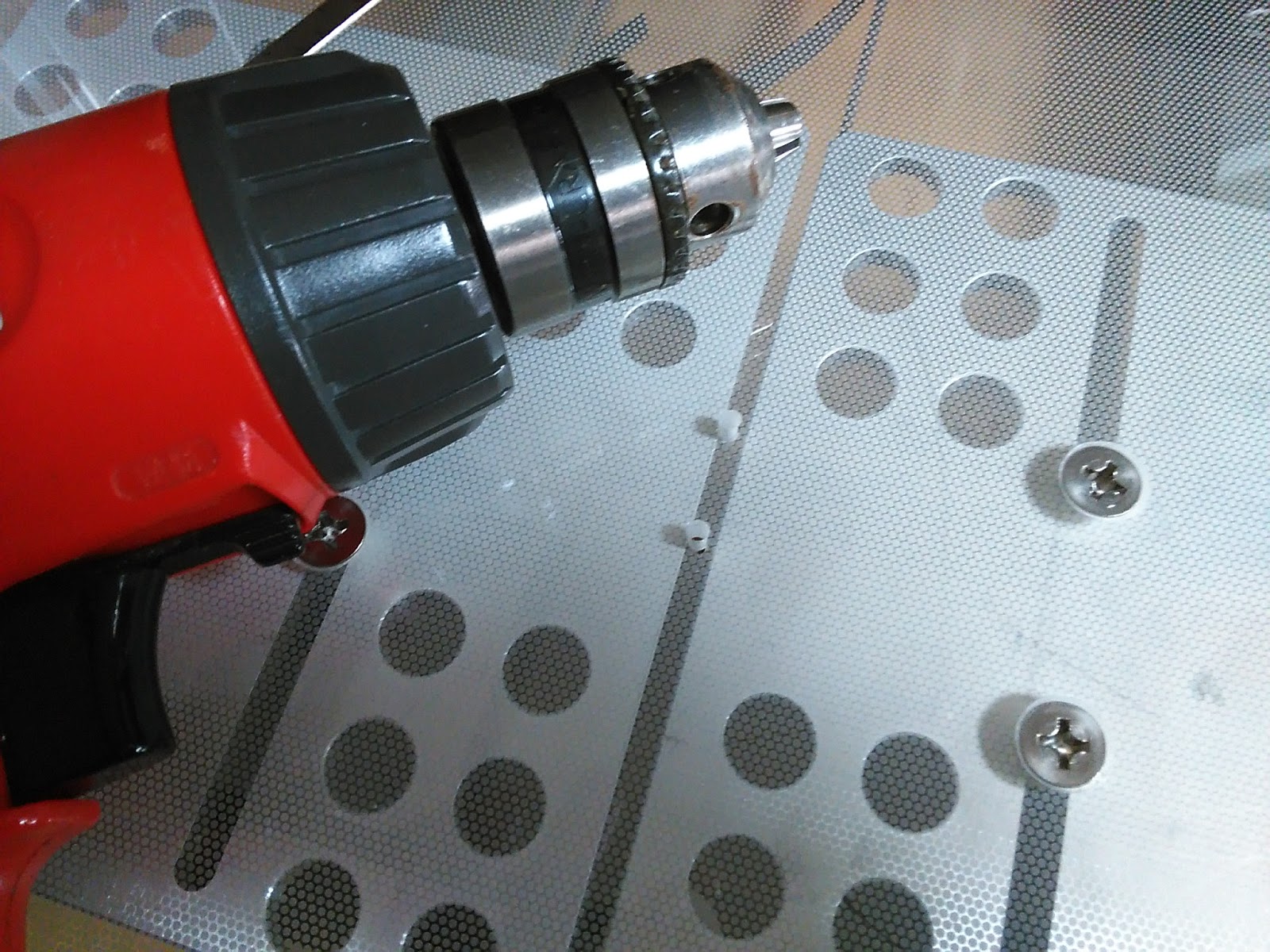
M3の長ネジを下に飛び出させます。
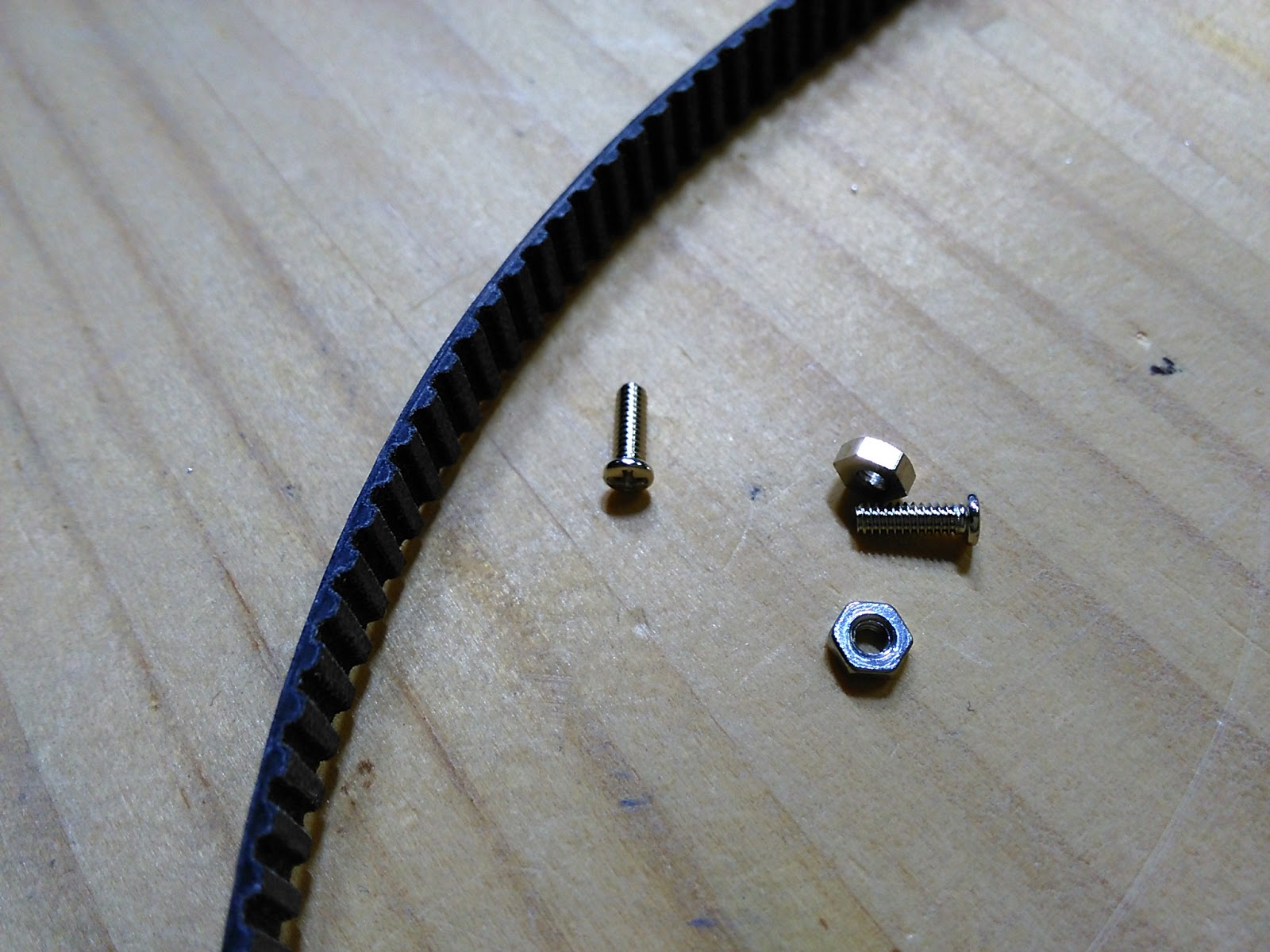
あとはいつもの通りに、ベルトの端を折り返してわっかを作り、その根元に貫通穴を開けてM2のねじで止めます。
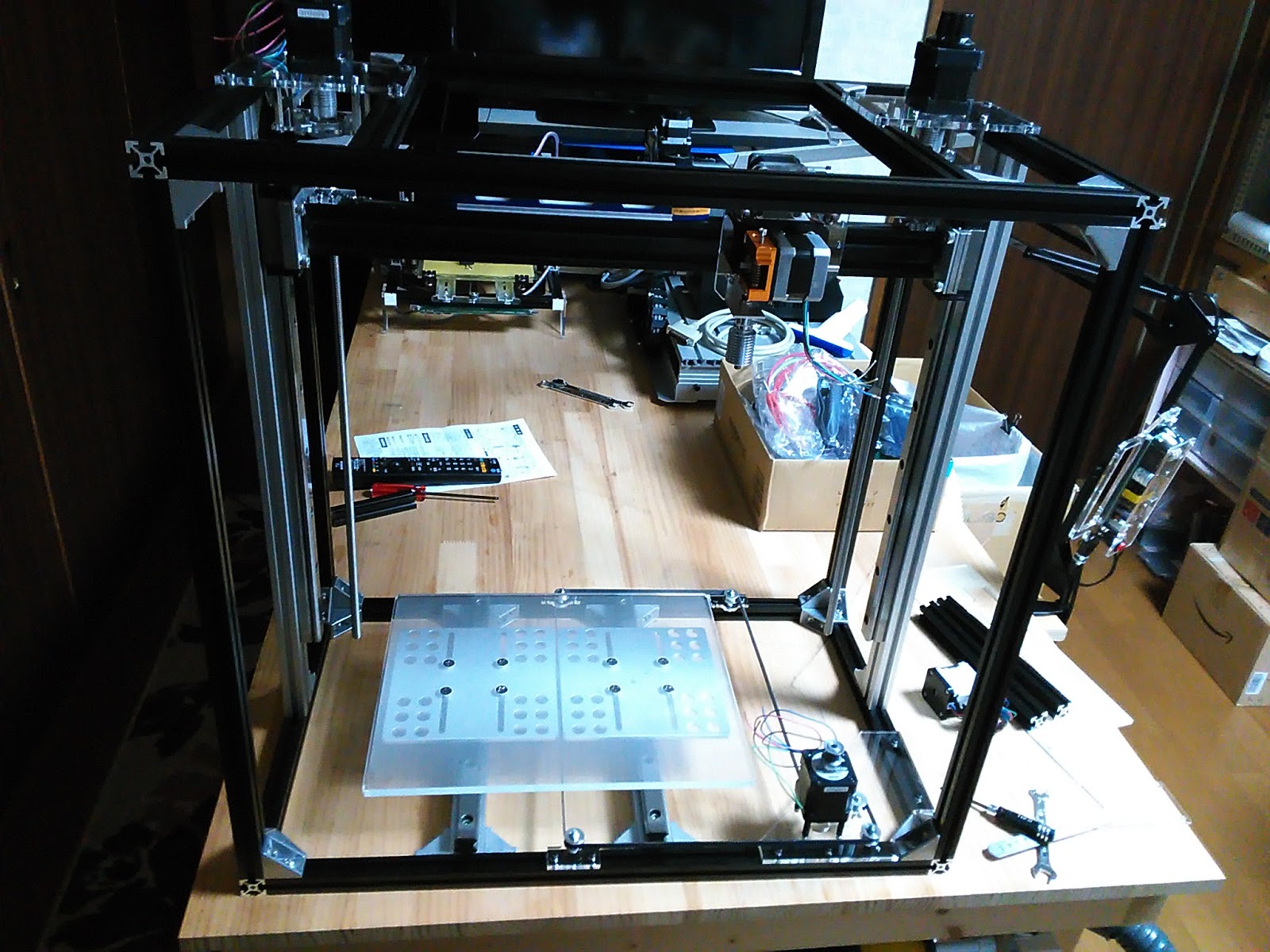
動かし見てましょう。
これでメカ部分はほぼ完成しました。
引き続き制御部分を作っていきたいと思います。来週中には動かし始めたいですね。