リミットスイッチの取り付けが終わりましたので配線に移ります。
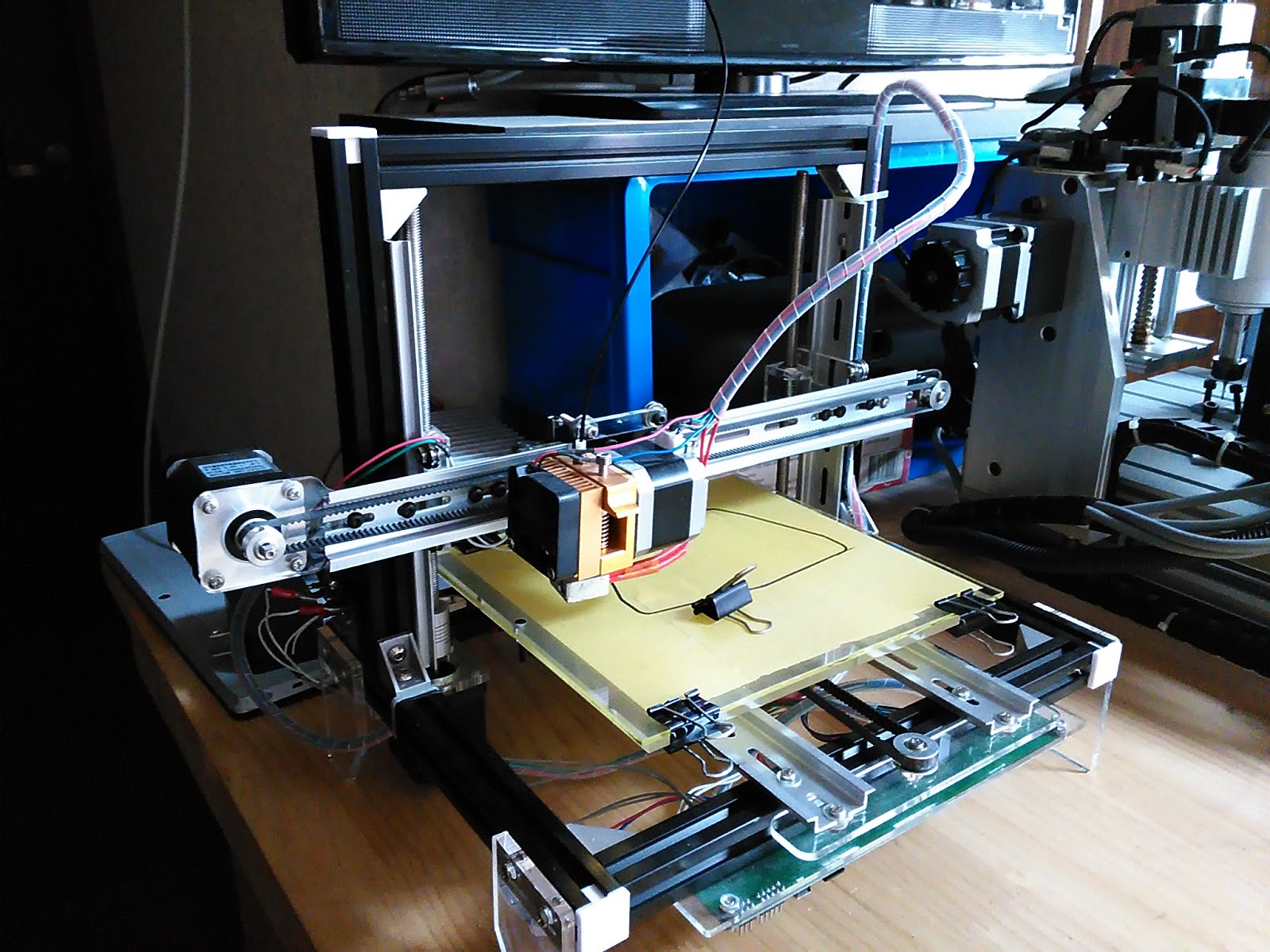
今回の3Dプリンタ(大)をどうやって動かそうかと考えておりました。といいますのも、このDINレールスライダを使った自作3Dプリンタが、
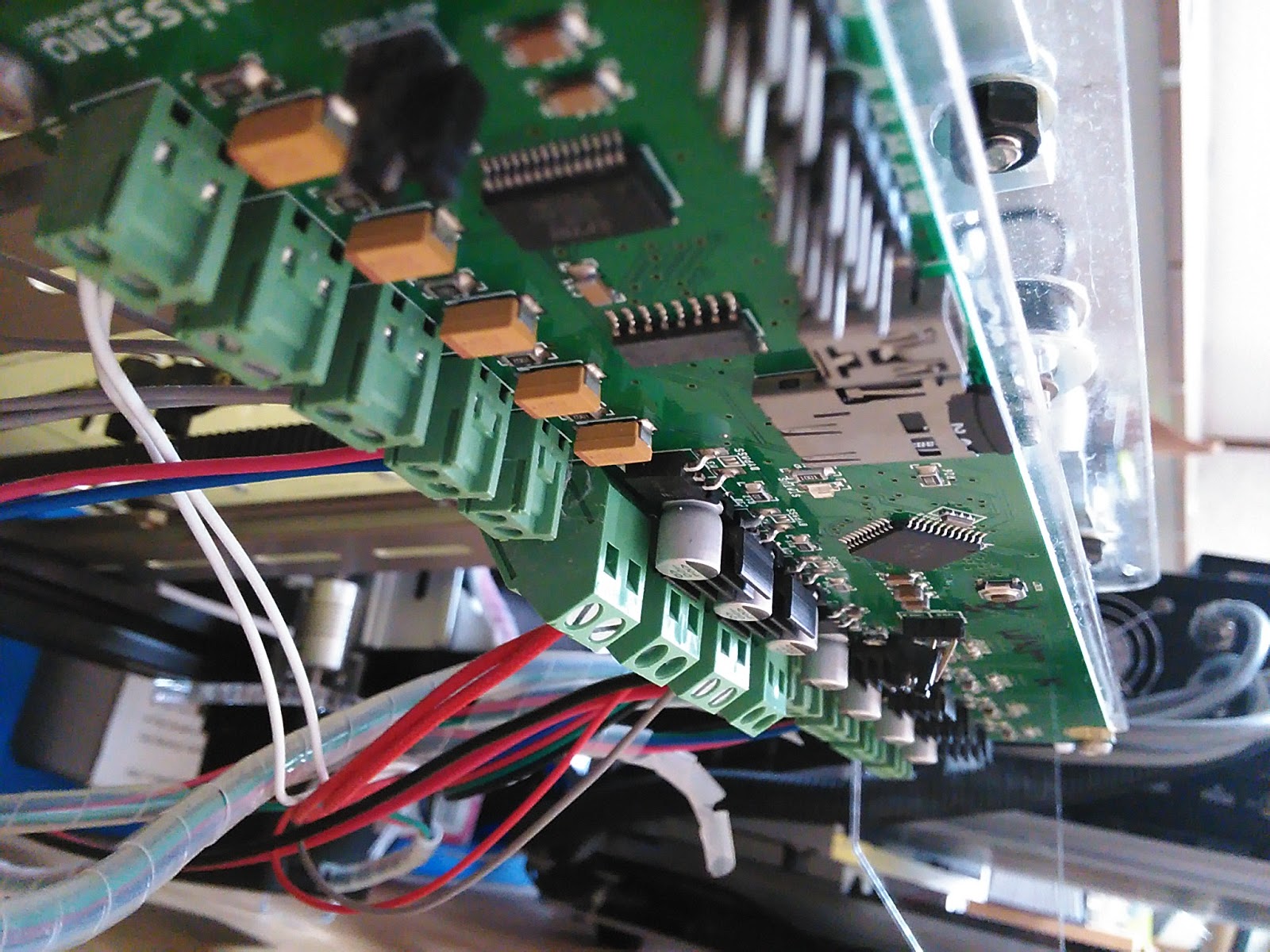
この専用基板で動いておりまして、これを流用するという選択と、
ストックしているRAMPS1.4やGen6のコンパチ基板を使うという選択があります。

まあここはRAMPSでしょう。このディスプレイも買っていることだし。

ということで、コントローラはRAMPSで行くことに。ファームのインストールからですので面倒ですが、DINレールのやつをばらす必要もなくなりますし、何よりやったことがないので面白そうです。ディスプレイが付くのもかっこいい。
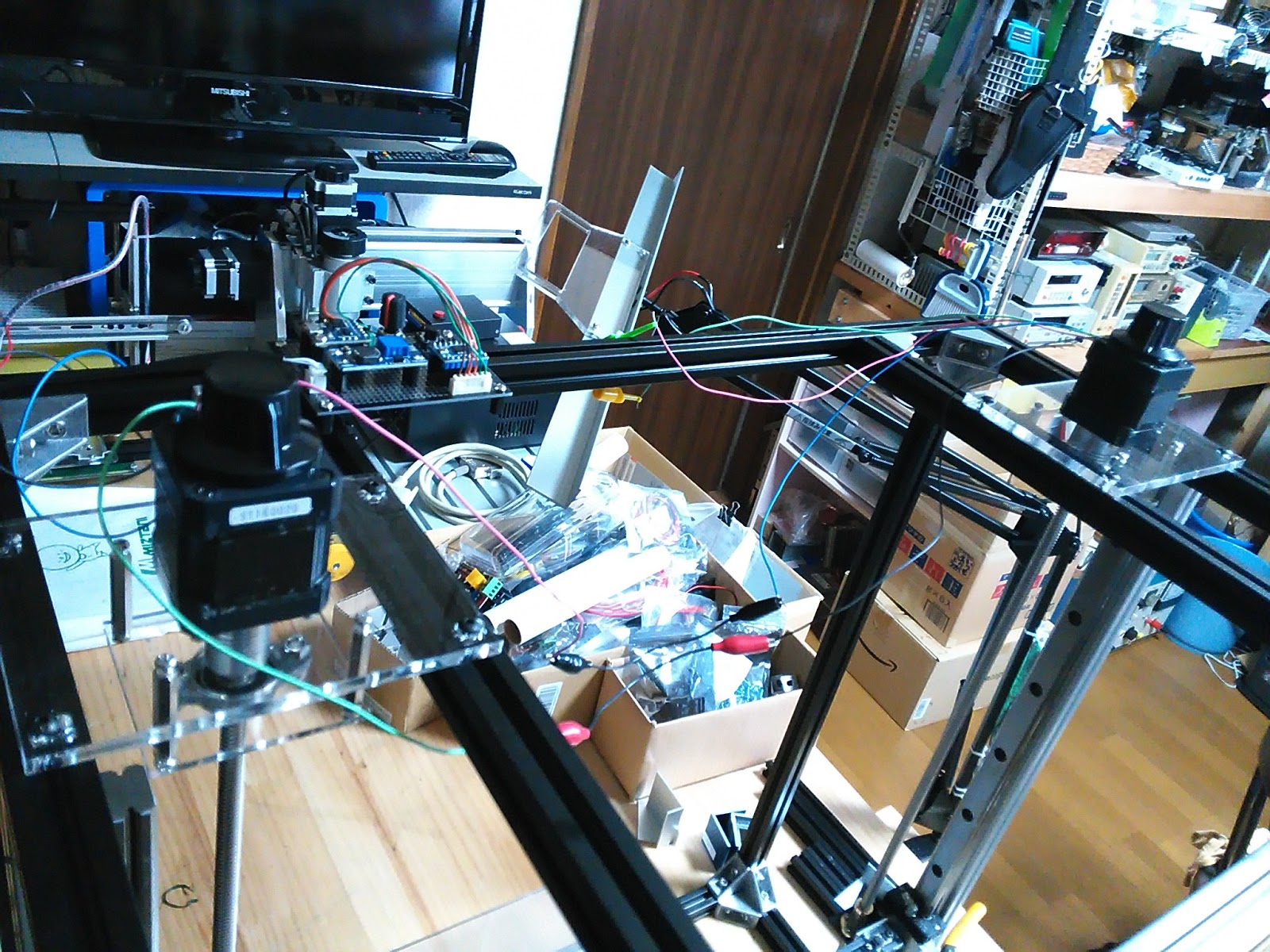
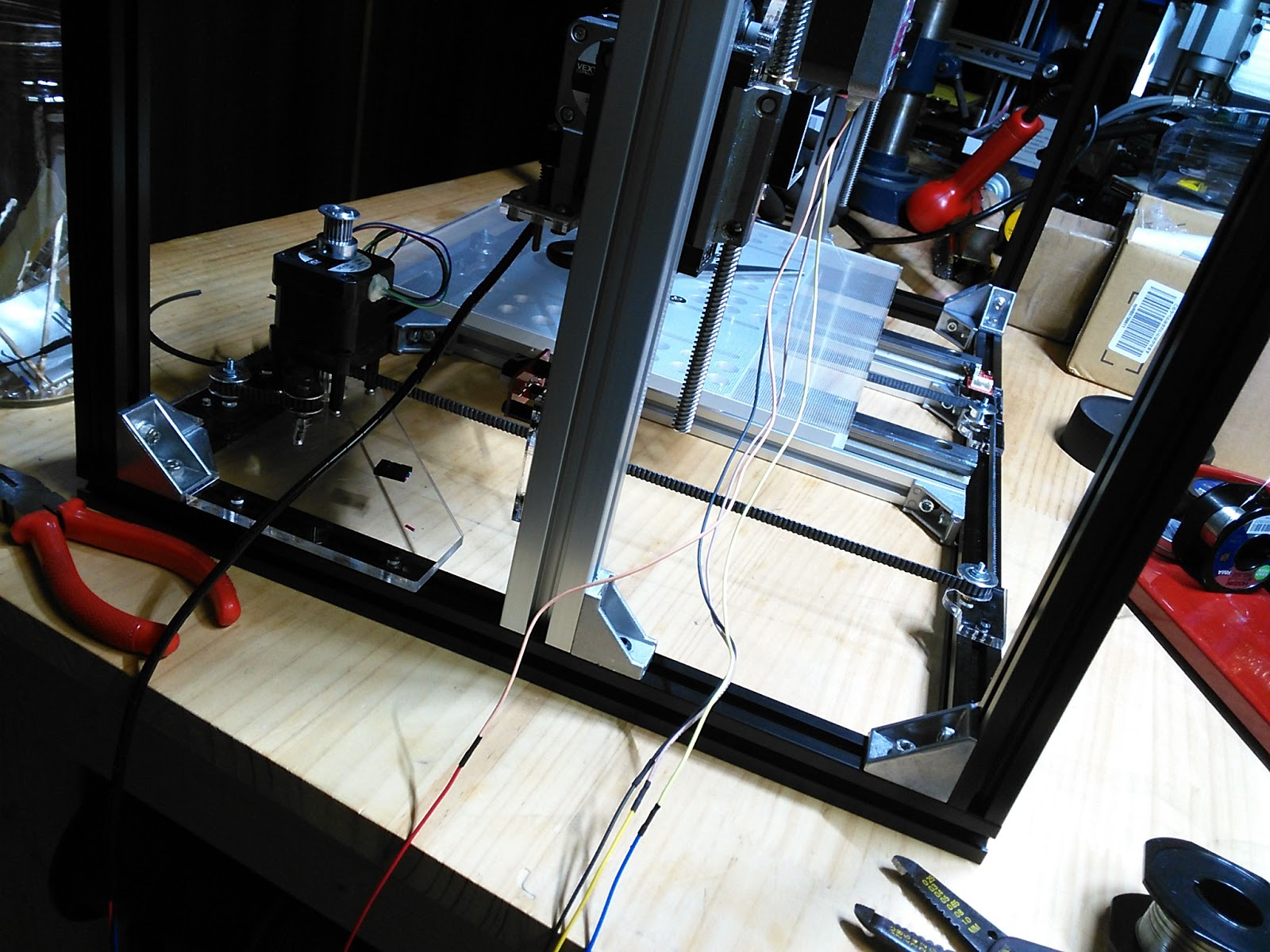
RAMPS基板とディスプレイの取り付け位置をおおよそ決めます。そこまでの配線を作っていくことになります。
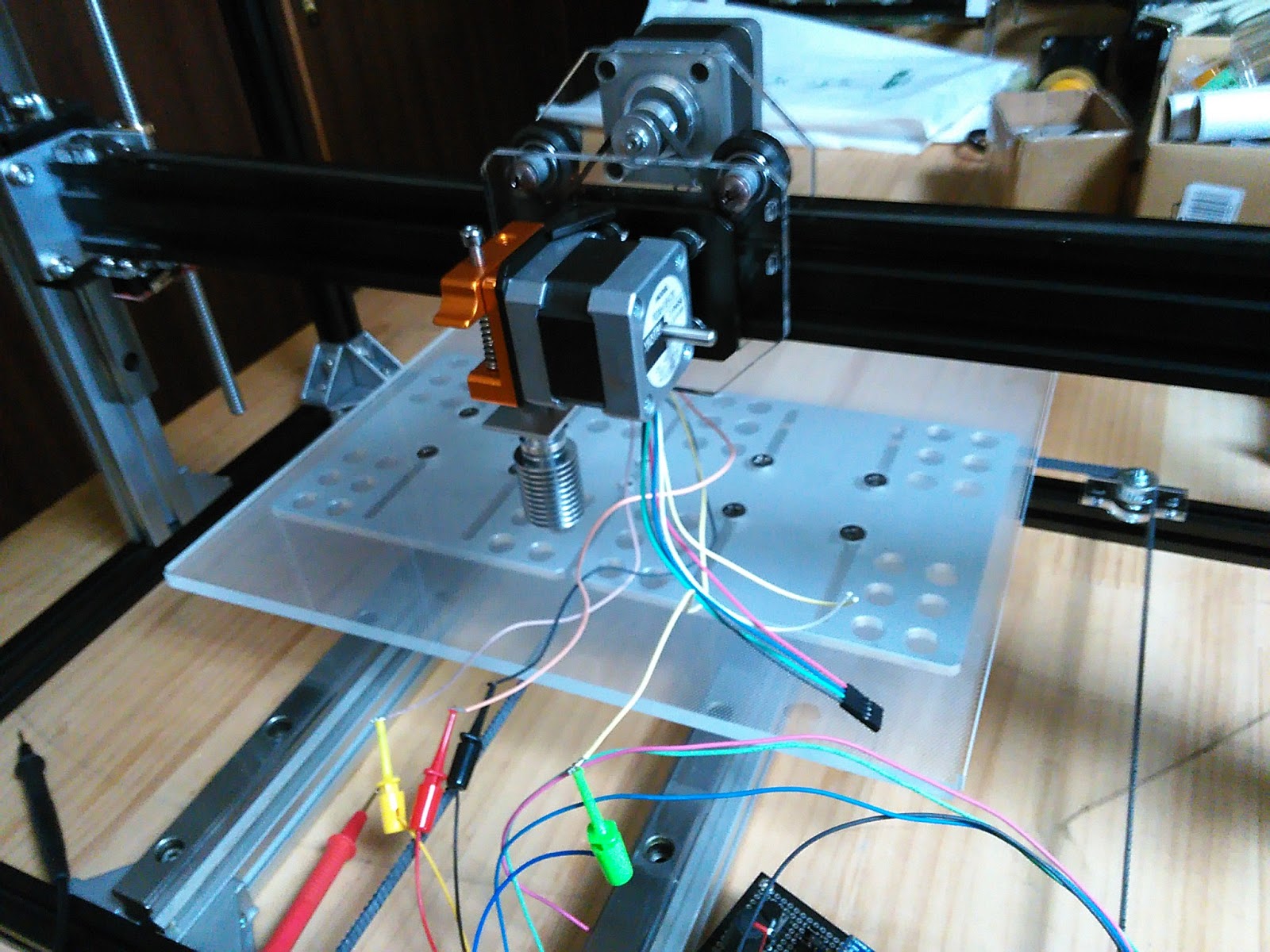
が、その前に、念のために今取り付けているモータでちゃんと各部が動くことを確認しましょう。特にY軸が重めですので不安があります。
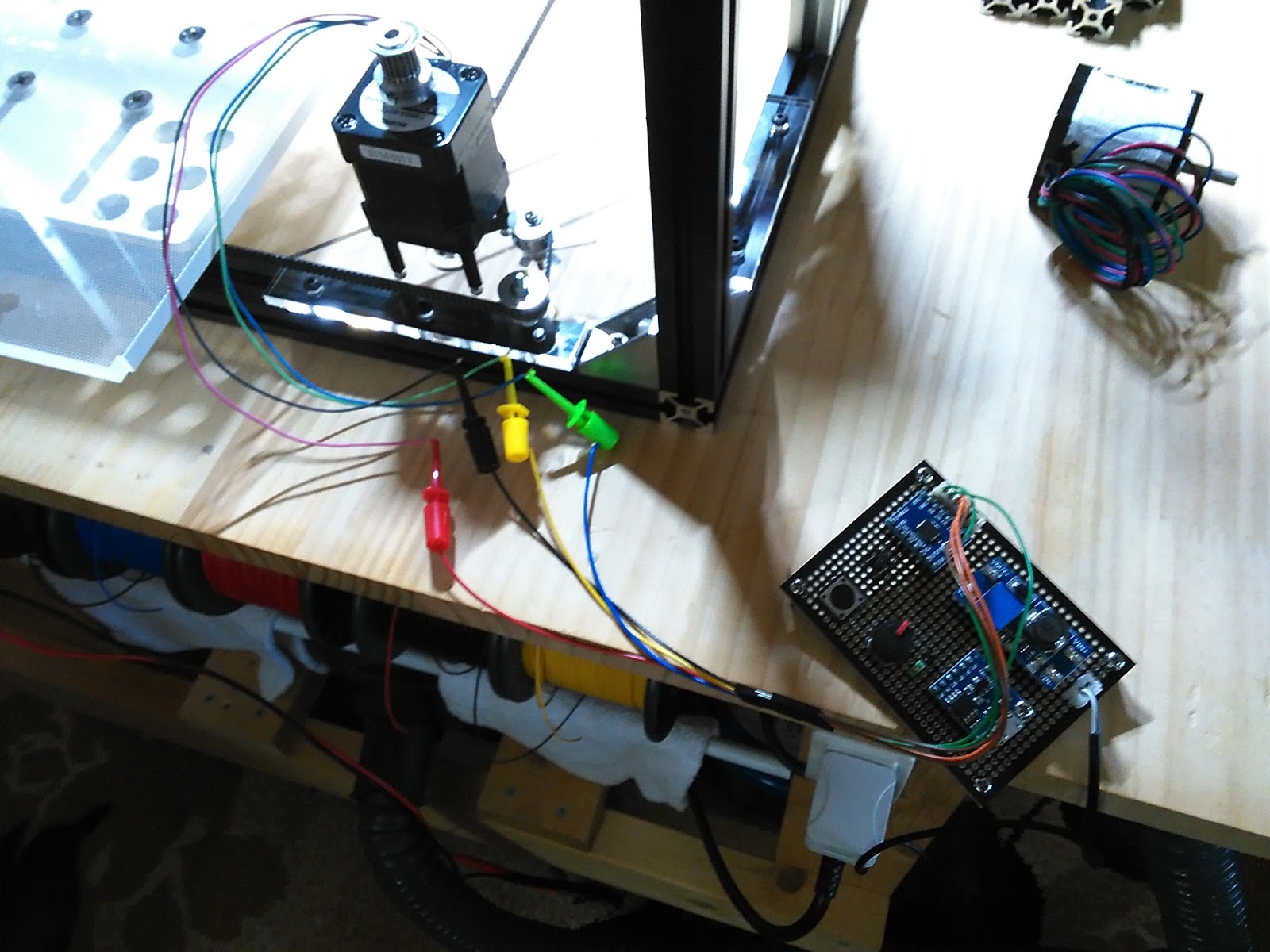
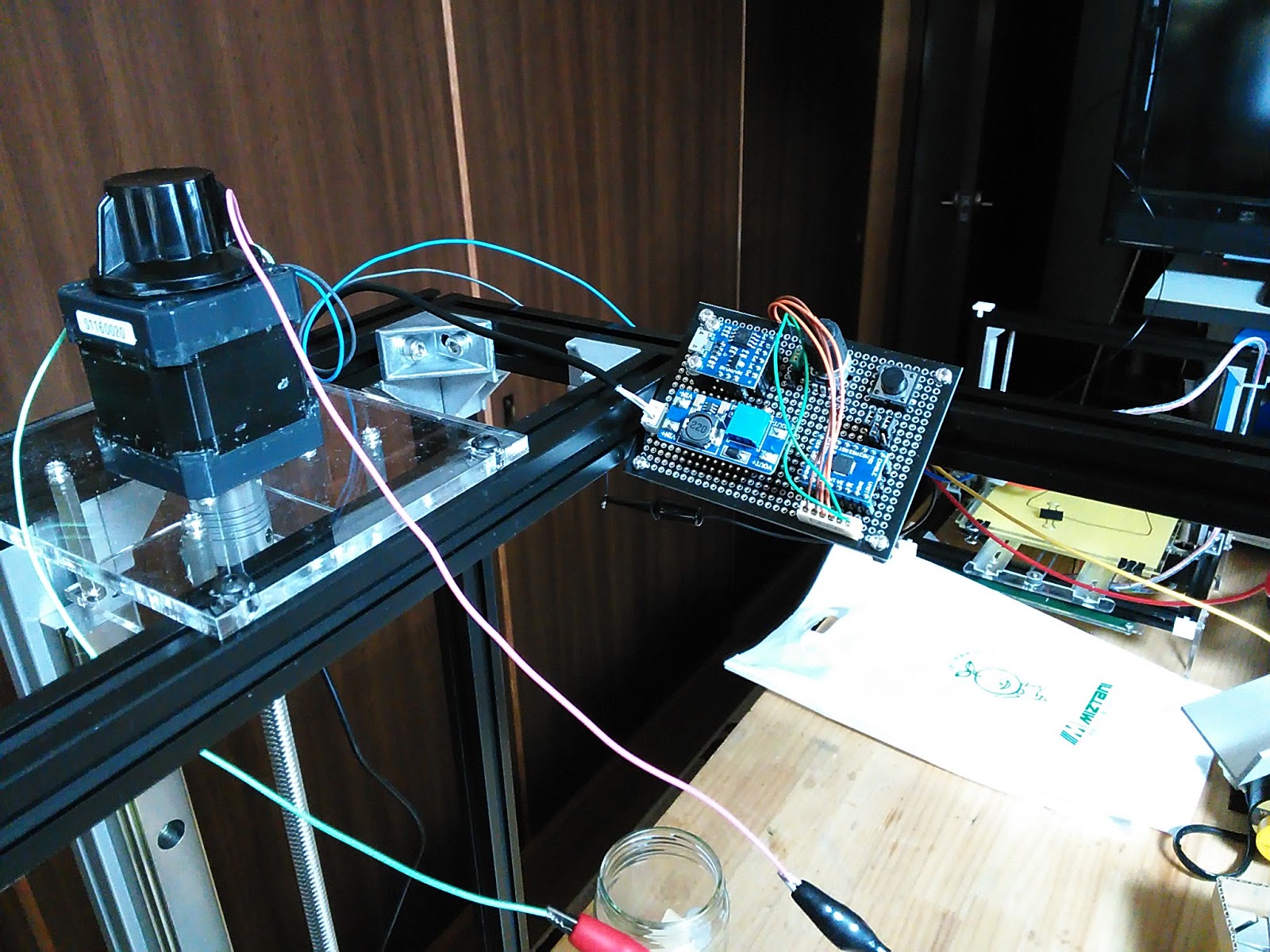
モータに直結配線するためのハーネスを作ります。
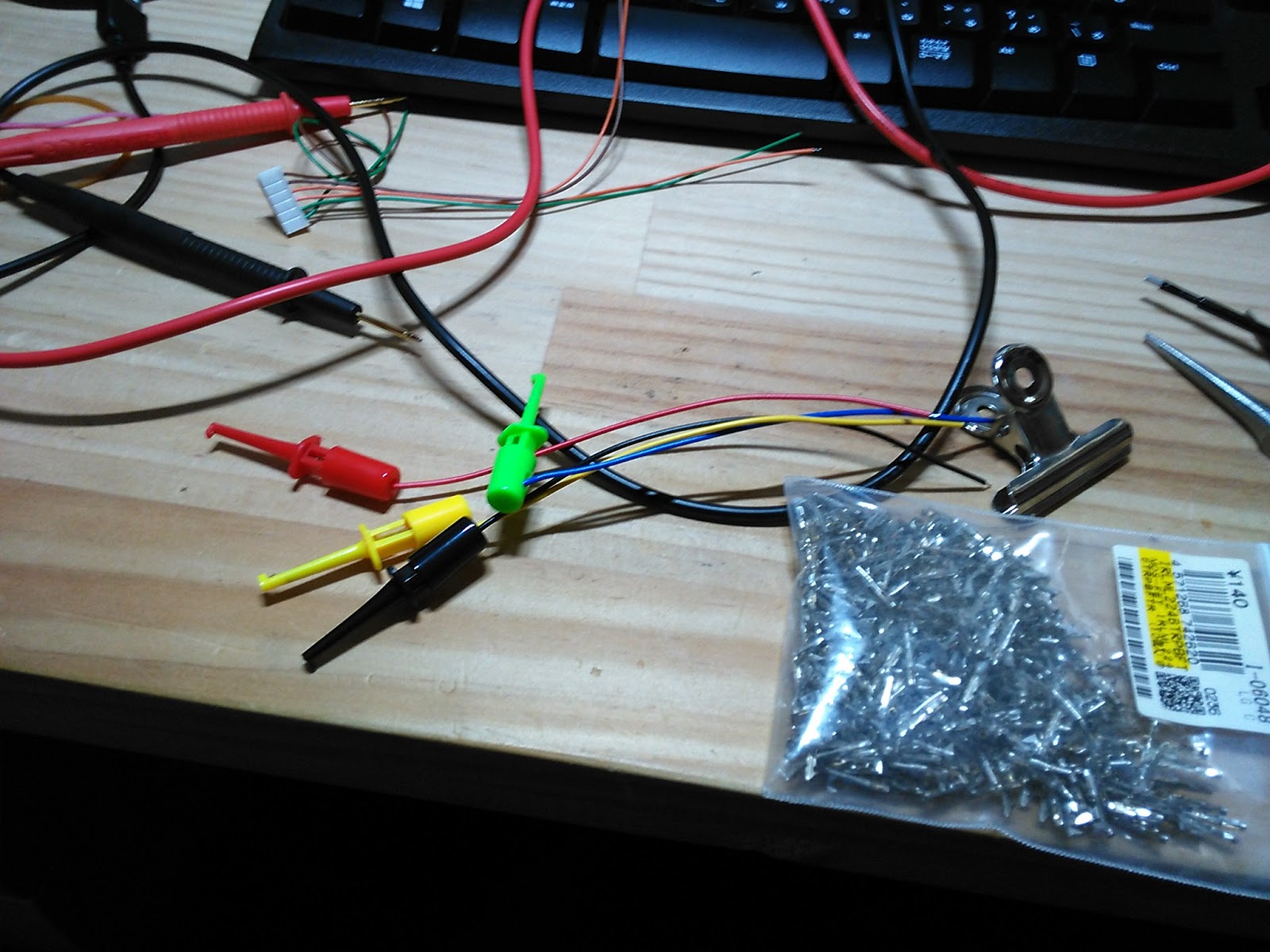
これを、つくると!5でつかったカメラスライダ用のドライバにつないでモータを回します。
まず心配なY軸から。
動画で。
ちゃんと動いて安心しました。
Y軸が動けば、ほかの二軸は間違いなく動くと思われますが、念のため確認します。
X軸。
動画で。
Z軸。
動画で。
これで一安心。配線に入ります。
RAMPS基板はQiコネクタ(デュポンコネクタ)での接続です。
基板まで届くハーネス長さにして、
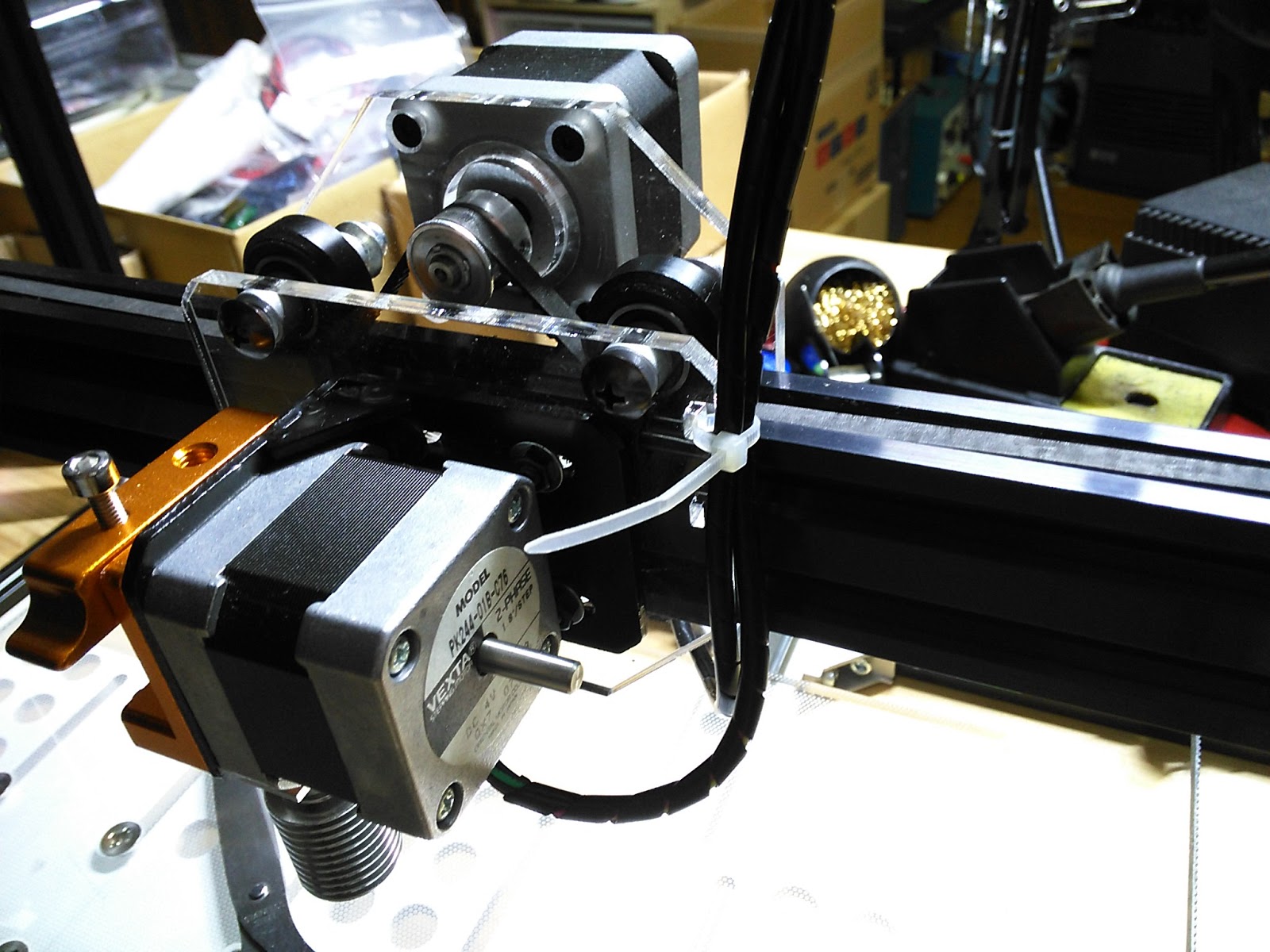
スパイラル巻きます。キャリッジ回りの配線はあらかじめ開けておいたタイラップ用の穴を使って固定。
Yじくモータも同じように、
配線してコネクタつけます。
Z軸はモータが左右二個あります。これらはまったく同じ動作をさせる必要があります。
二つのモータへの配線は、直列接続と並列接続の二方式があります。DINレール3Dプリンタの時は直列接続しました。ので、今回は並列に接続してみます。並列接続ではドライバから各々のモータに流れる電流が半分になりますが、Z軸は非常に軽く回っていますので問題ないと思われます。
並列接続を作って、
基板取り付け予定位置までハーネスを伸ばします。
コネクタつけて完成。
お次はリミットスイッチの配線です。これがやや嵌りました。
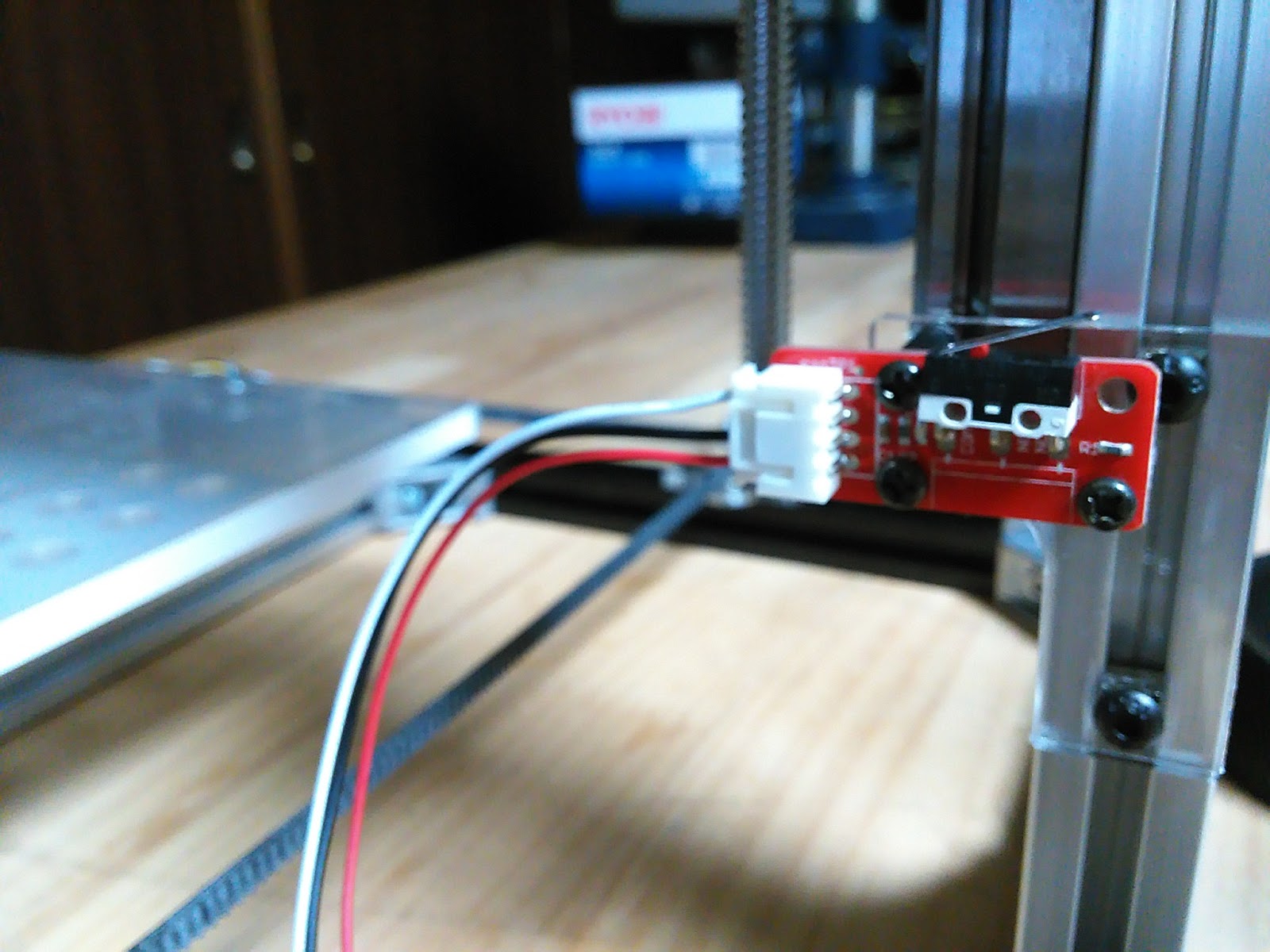
といいますのも、このリミットスイッチ基板は神から賜りしものの一部であるため、私は詳細を承知していないのです。
基板からは線が4本出ています。基板上にはリミットスイッチのほか、チップLED、抵抗、コンデンサが乗っているのが見えます。抵抗とコンデンサはチャタ防止の時定数とLEDの電流制限と思われます。
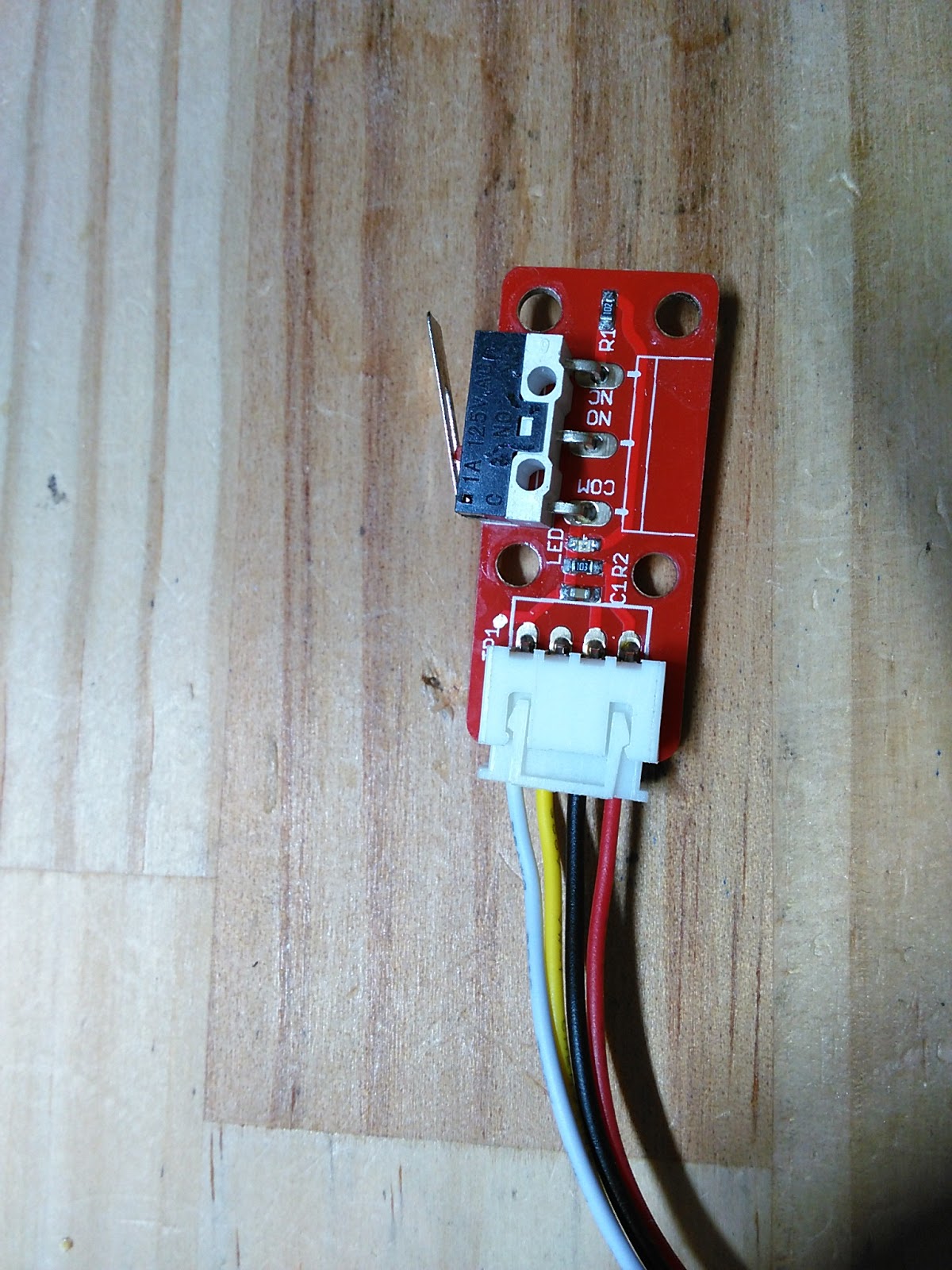
この外観を参考にネットの情報をしばし探りますが、ネットに同じ形式のものが見当たりません。全部3本線なのです。ということで、やむなくテスターで当たって動作を調べていきます。
赤黒はおそらく電源だろう。黄色と白はそれぞれスイッチが押されたときにHとLになるのだろうと勝手に想像しながら調べていきましたが、どうも違うようです。やはり決めつけは良くないです。
小一時間格闘しましたが、結局パターンを追って配線図を書きました。
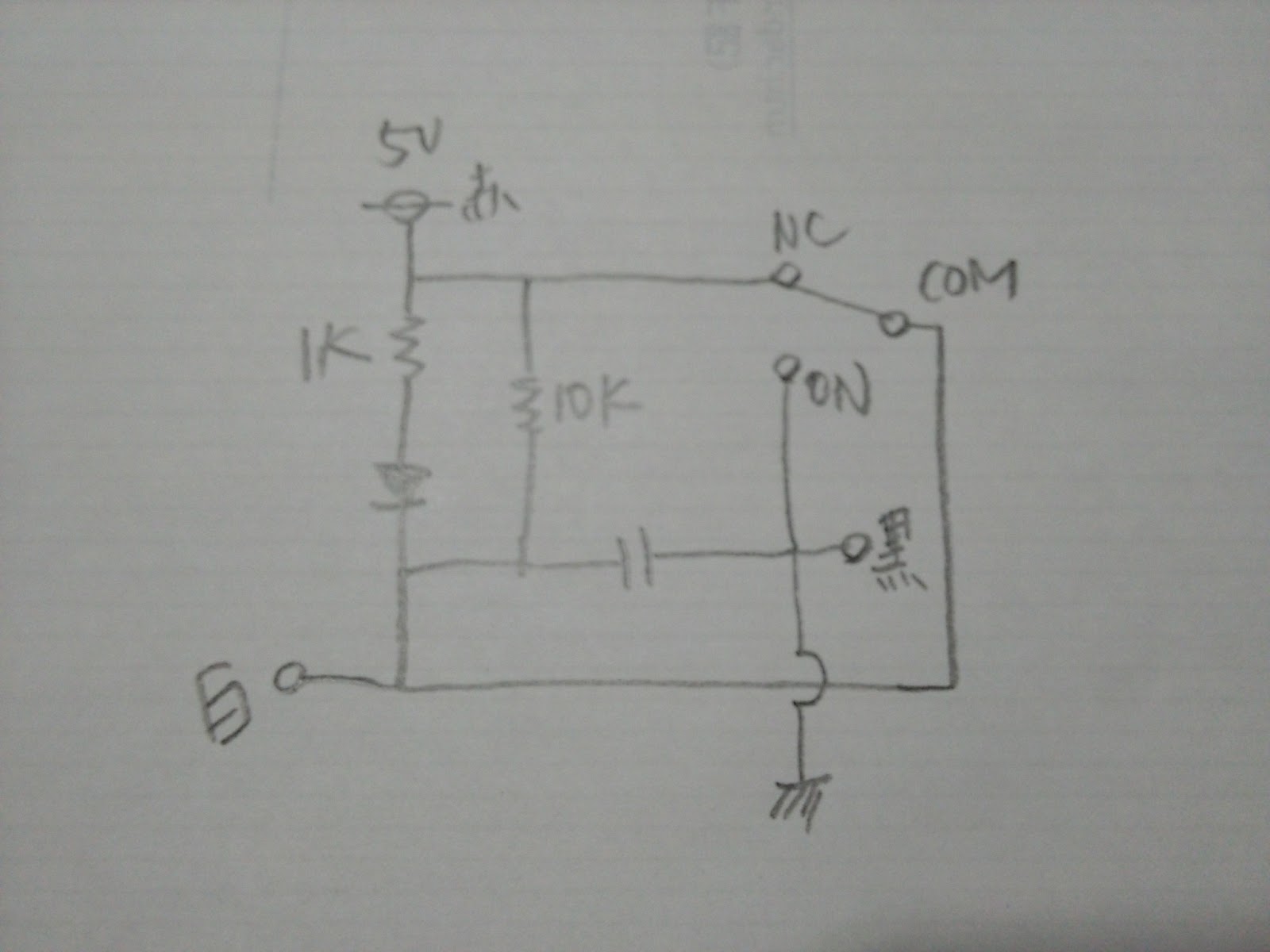
こうなっていました。結局黄色と黒は直結されていて、実質3本線。また、スイッチの動きは押されたときに白がGNDに落ちるだけでHの線はありませんでした。
わかってしまえばなーんだというやつですが、苦労しました。思い込みは良くないなあと自戒した次第。
結局この三本を引き出してくればOKということになります。
3か所のリミットスイッチからそれぞれハーネスを引っ張って配線作業を終わりました。
お次の作業はRAMPS基板へのファームのインストールと設定です。