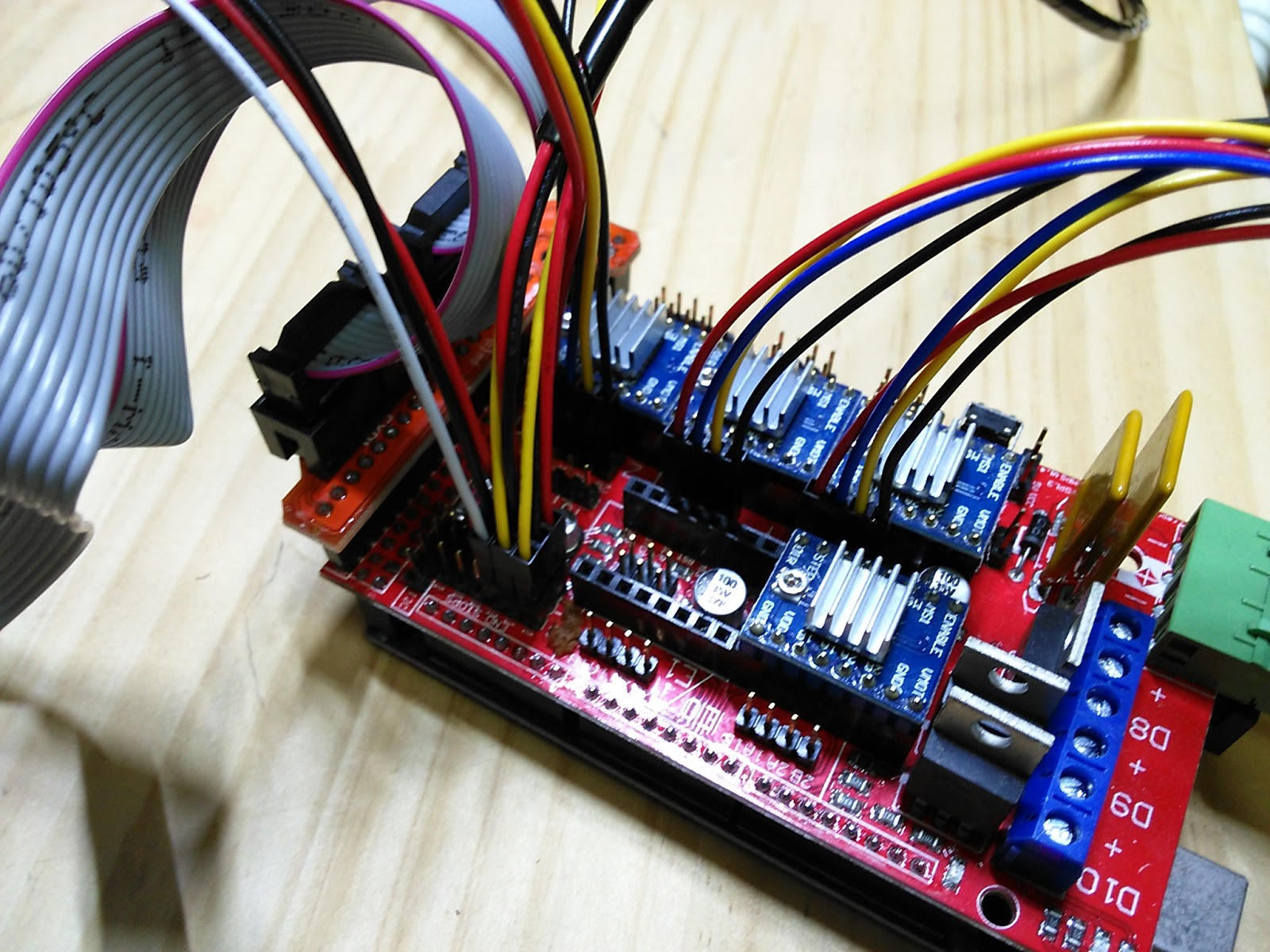
設定が終わったRAMPS基板を本体に接続します。
まず電源。

RAMPSは24Vに対応していないようですので、12V電源を使用。
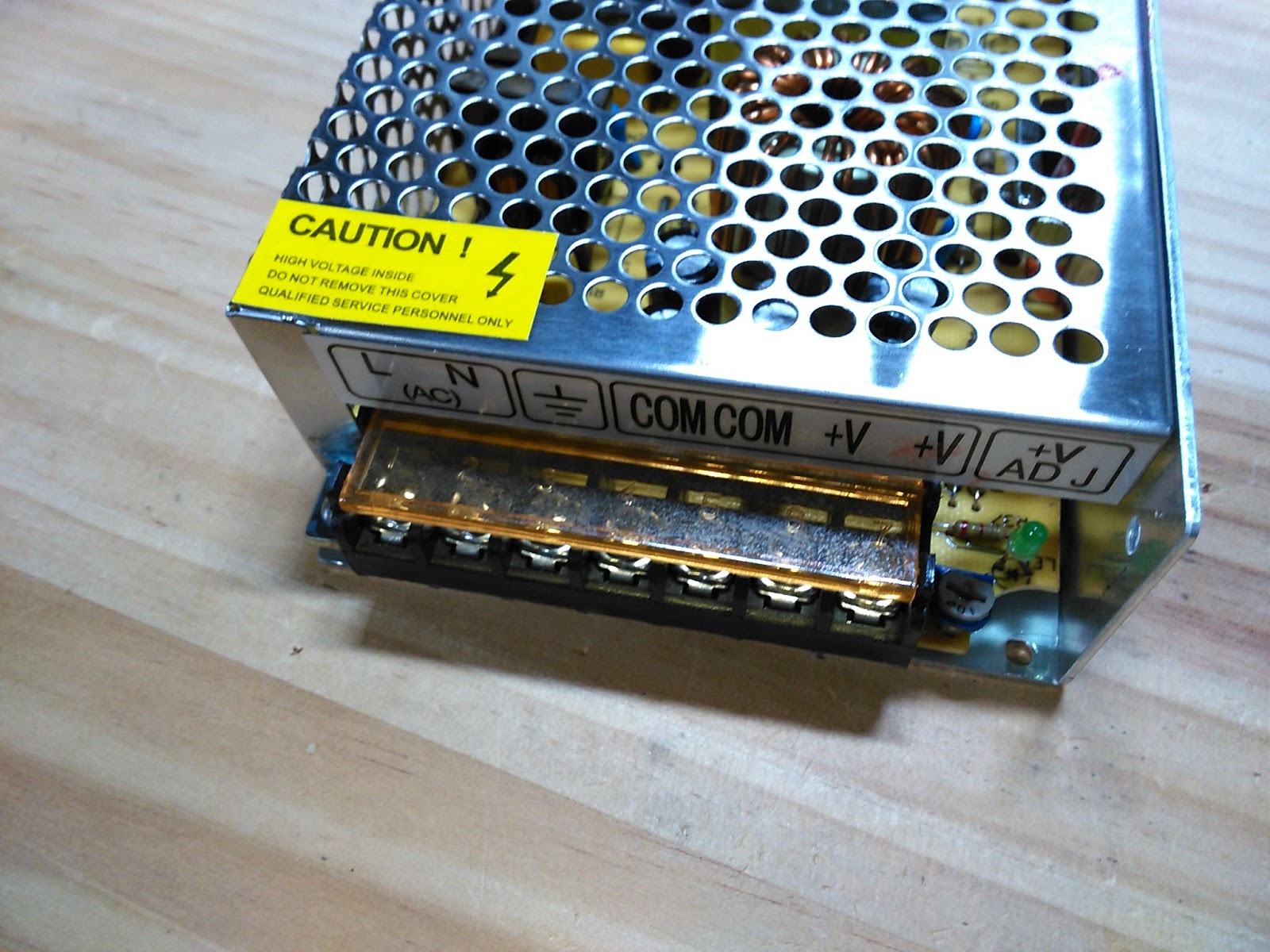
電源にAC100Vのケーブルをつなぎます。
丸端子と、

コード入れから適当な100Vプラグを探します。

これでいいでしょう。

端子カシメます。100Vラインは抜け防止に丸端子を使うのが良いですよ。

繋ぎます。
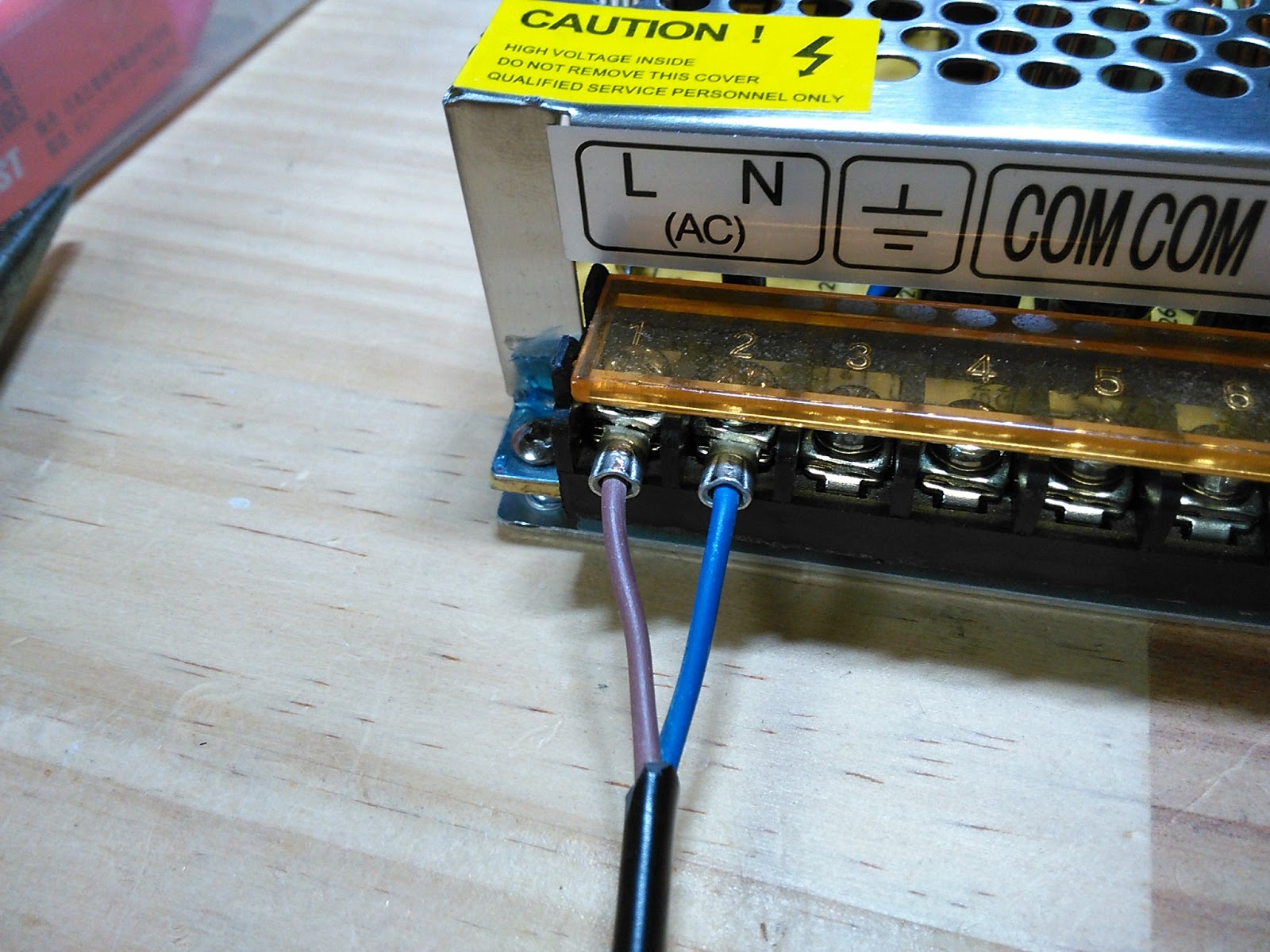
DC側は結構な電流が流れますので太めの線を使いましょう。
念のため電源の電圧を確認してから接続します。
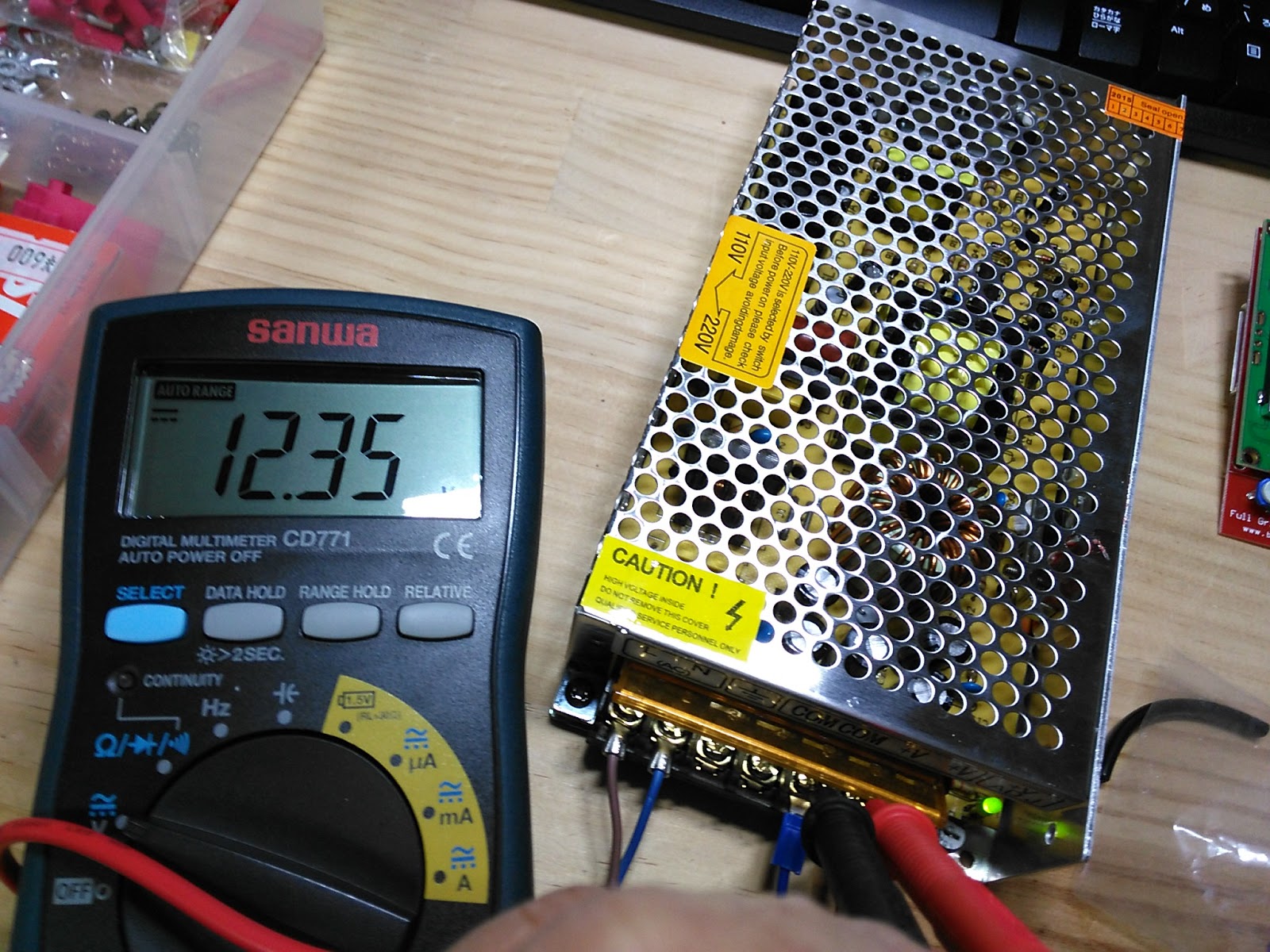
動きました。
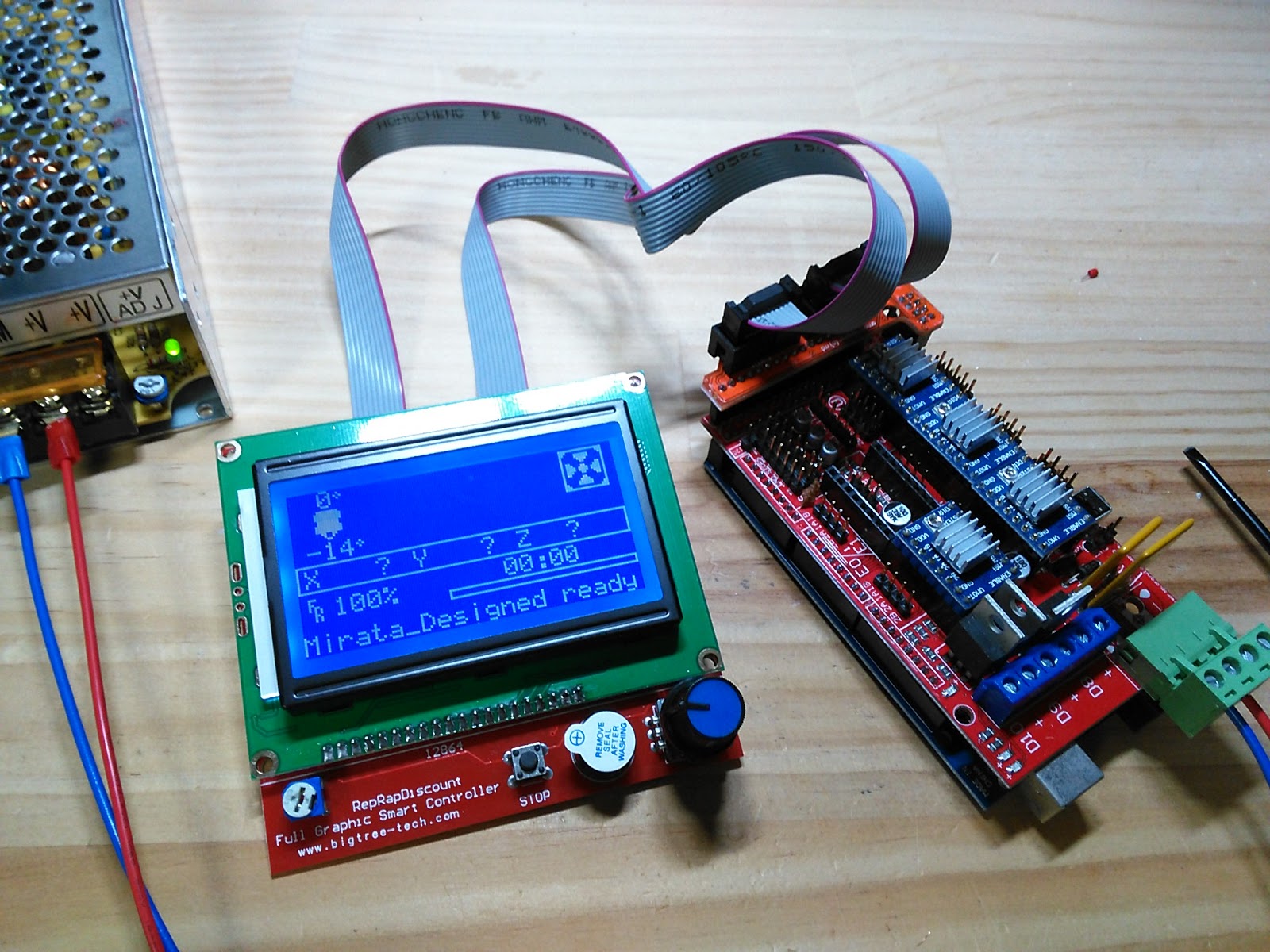
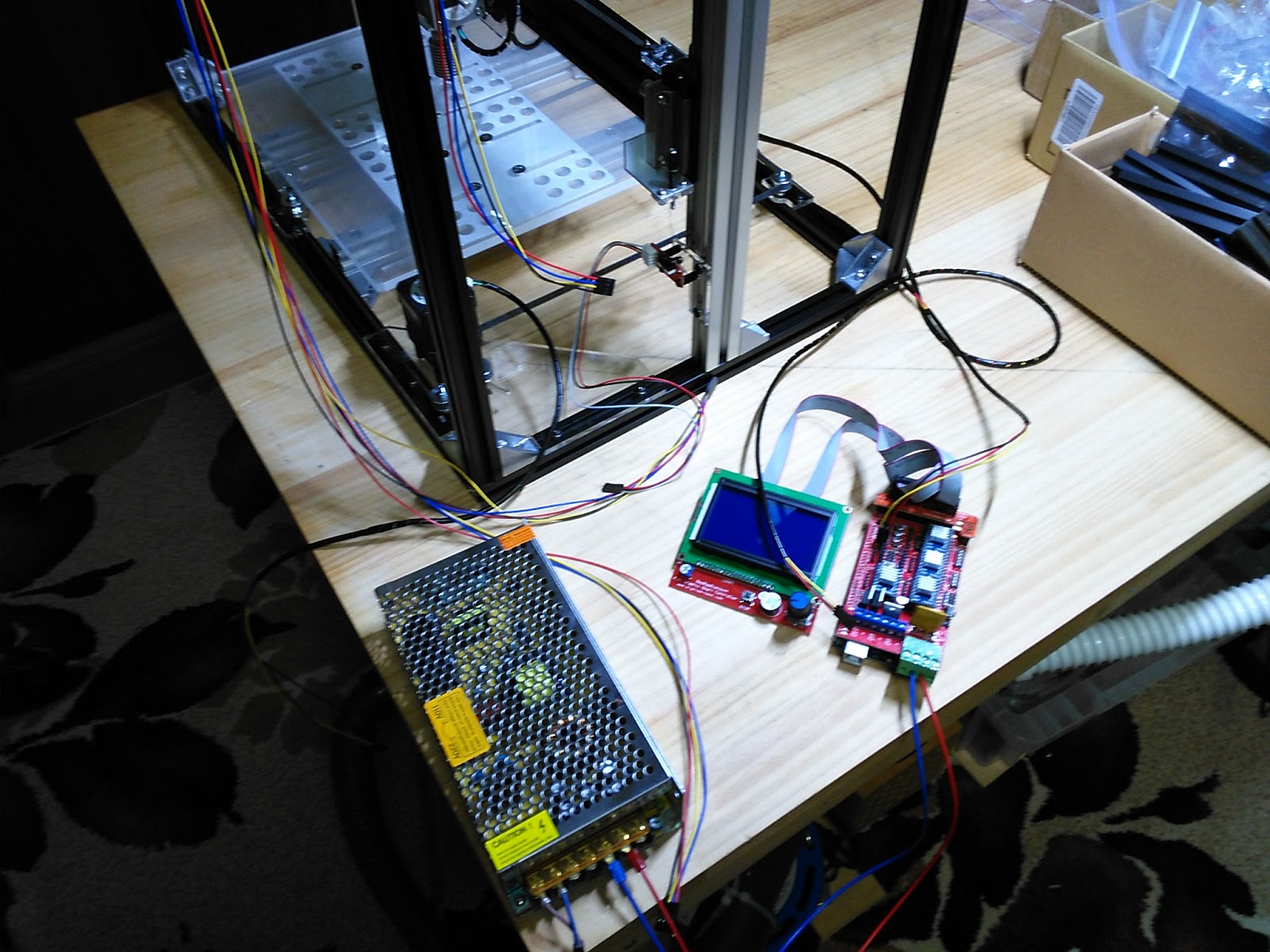
モータ等々繋いでいきます。
基板への接続は「RAMPS1.4」で画像検索するとすぐに見つかりますので割愛します。基板にもシルクが入ってますしね。
繋いだら、原点復帰させてみます。動画で。
テスト動作時にリミットスイッチがうまく反応しませんでした。
調べてみると、設定でロジックが逆になっていました。
この後はパルスレートの設定です。
LCD基板からマニュアルで軸移動(例えば100mmとか)させて、実際に動いた距離をスケールで測定してその比率からパルスレートを決めていきます。
最終的に以下のようになりました。なぜか小数がありますが、実測なのでしゃーないです。タイミングギアの加工精度の問題かな。
***********************************
* With this option each E stepper can have its own factors for the
* following movement settings. If fewer factors are given than the
* total number of extruders, the last value applies to the rest.
*/
//#define DISTINCT_E_FACTORS
/**
* Default Axis Steps Per Unit (steps/mm)
* Override with M92
* X, Y, Z, E0 [, E1[, E2[, E3[, E4]]]]
*/
#define DEFAULT_AXIS_STEPS_PER_UNIT { 76.4, 80, 400, 94 }
***********************************
まだホットエンドつけてませんが、動作確認をしてみます。
Repetier Host起動して、USBケーブルでArduinoMEGAと接続、マニュアル動作で軸が動くことを確認したのち、適当なSTLファイルを読み込んで動きだけを確認してみます。
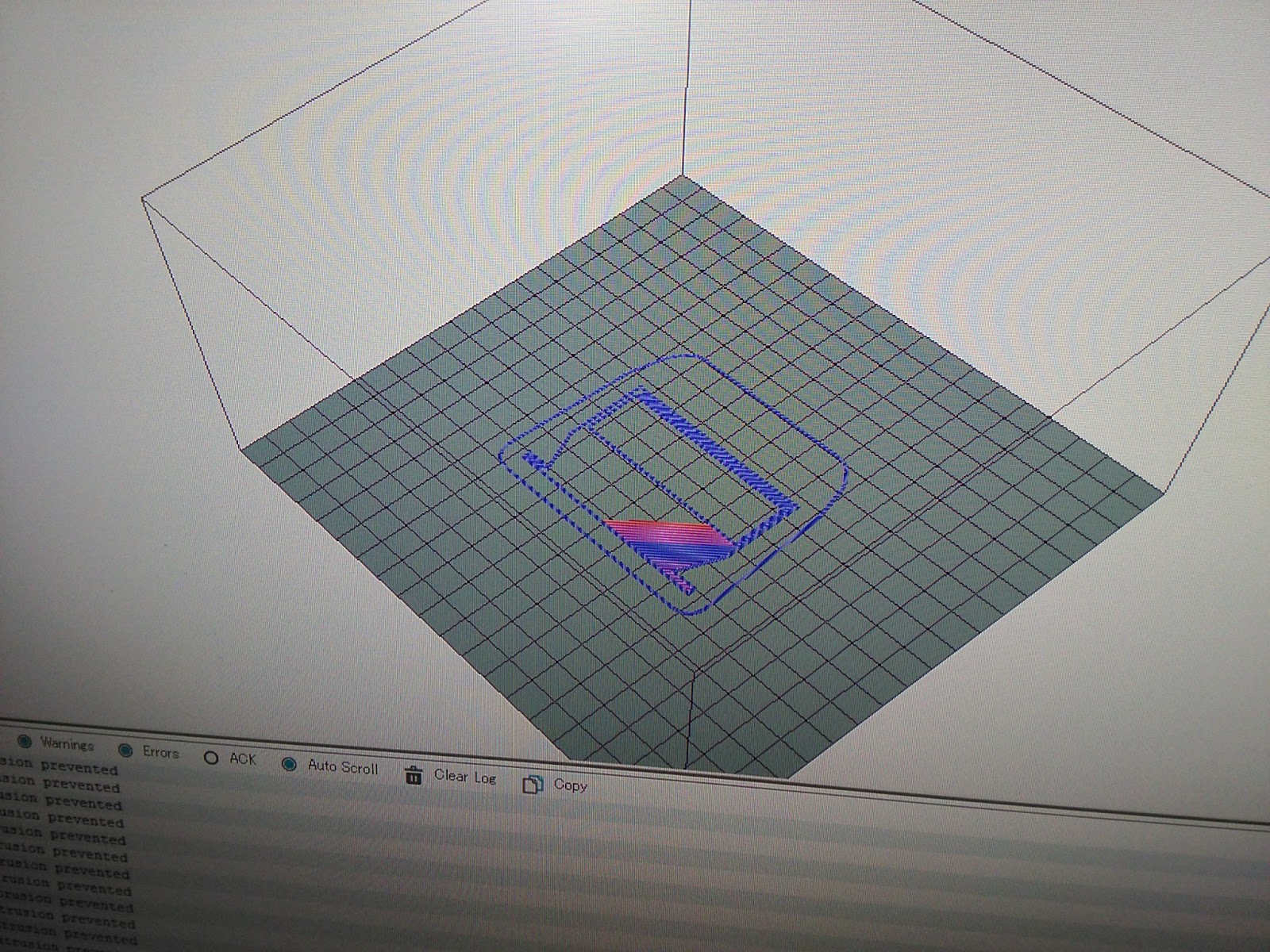
動画で。
細かなところはわかりませんが、とりあえずはええ感じに動いているようです。
次はホットエンドを取り付けて実際にプリントしてみます。