Y軸はリミットスイッチを除いてあらかたできましたので、Z軸を作っていきます。
Z軸にもDINレールスライダーを使いますが、ベルトではなくねじ送りにします。理由は二つ。まず、ベルト送りにするとZ軸送りモータの励磁が切れたときにZ軸が下に落ちてきてしまうのを避けることです。これはプリント完了後も励磁を切らないように命令するなど、Gコードの作り方で避けることができます。そして二つ目の方が大事です。精度の確保のためです。ベルトドライブに標準的なプーリー(Φ13mmだったかな..)をつけて、T2.5のベルトをかけると、1.8°/stepの16分割マイクロステップ制御をおこなった時の1マイクロstepでの送りは110umくらいになったはずです。つまり、最小の積層ピッチがこの値になります。それに対してねじ送りの場合、今回使うM8細目ねじのピッチは1mmですので、Z軸モータが1回転すると送りナットは1mm進むことになります。この時、モータは1.8°/stepの1/16回転が最小ですので、角度に換算すると0.1125°という非常に小さい値になります。ねじは一回転、すなわち360°で1mm進むわけですから、1マイクロステップで計算上0.3125um(ミクロンです!)進むことになります。これがねじ送りを使った時の積層の最小ピッチになります。どちらを使うべきかは自明であります。
ということで、あいかわらず前置が長いみら太な日々であります。Z軸を作っていきましょう。
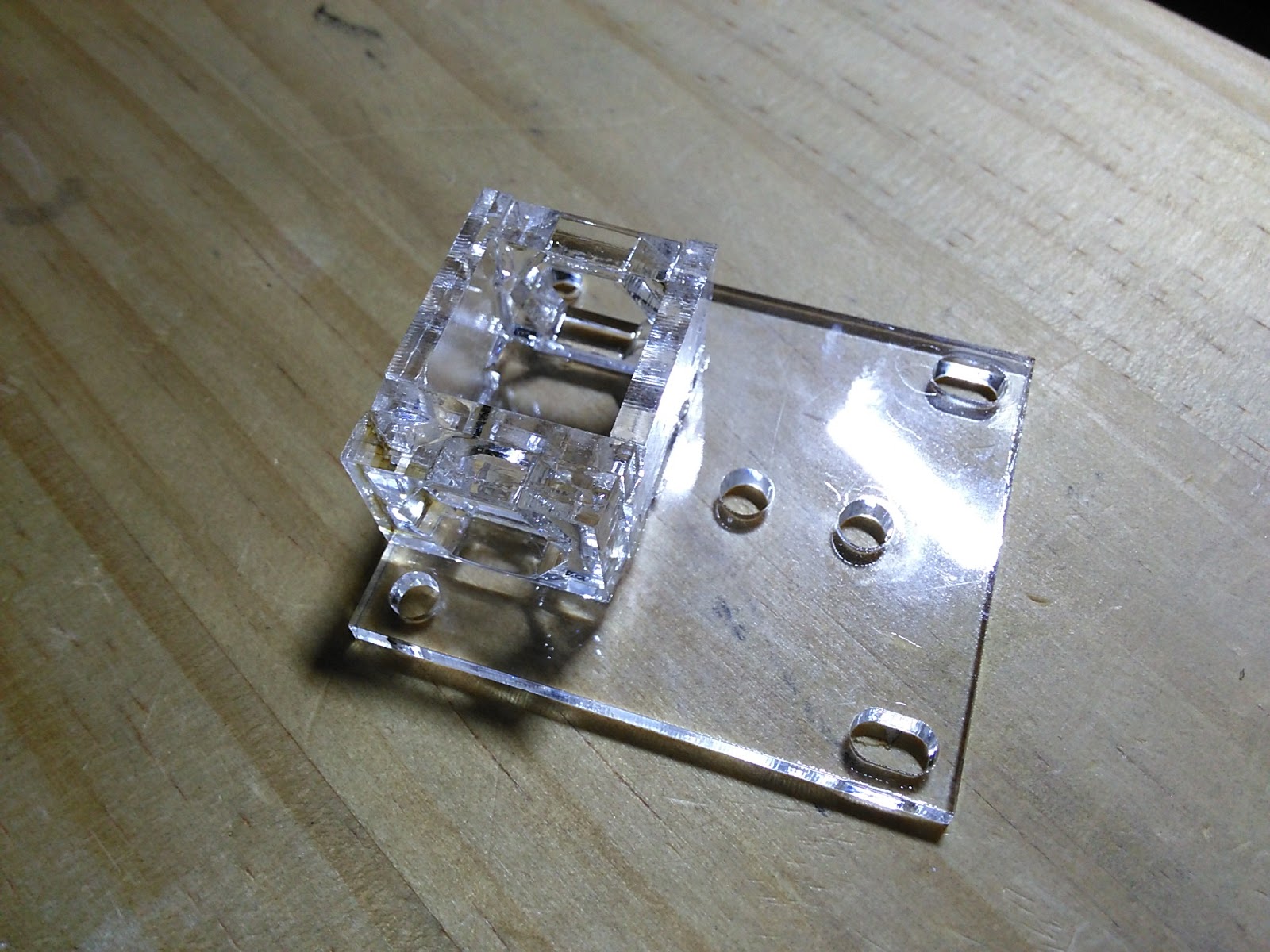
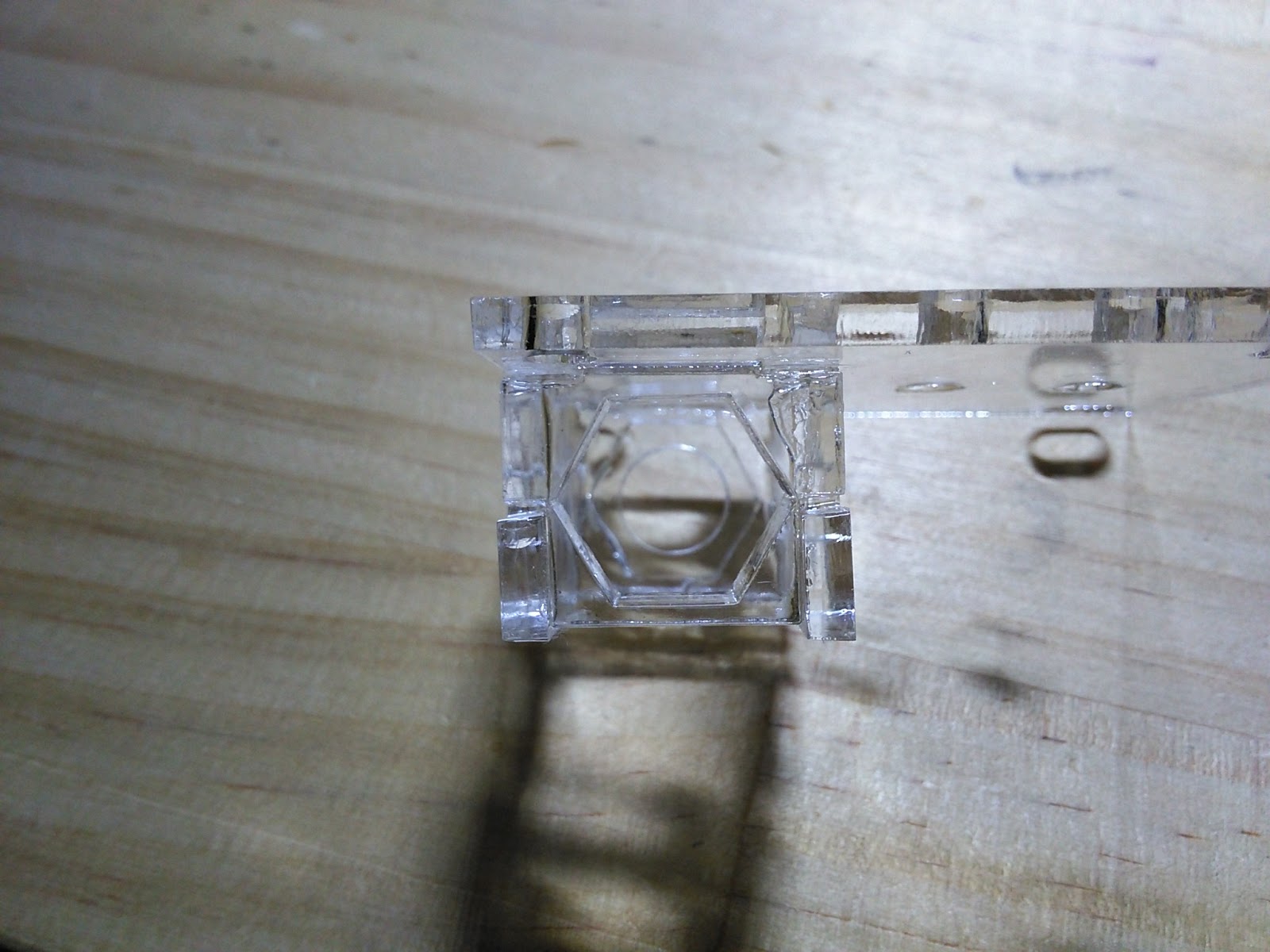
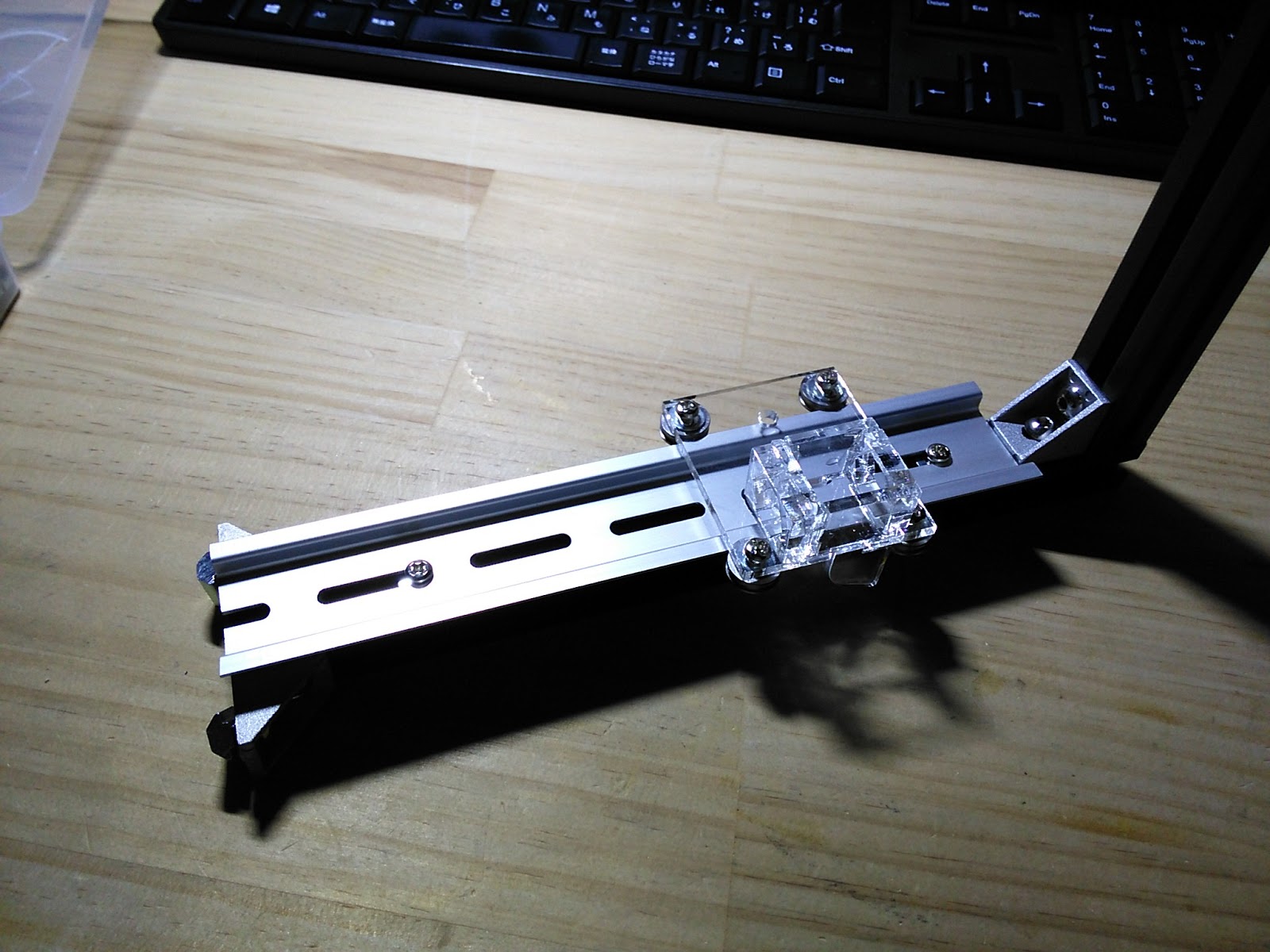
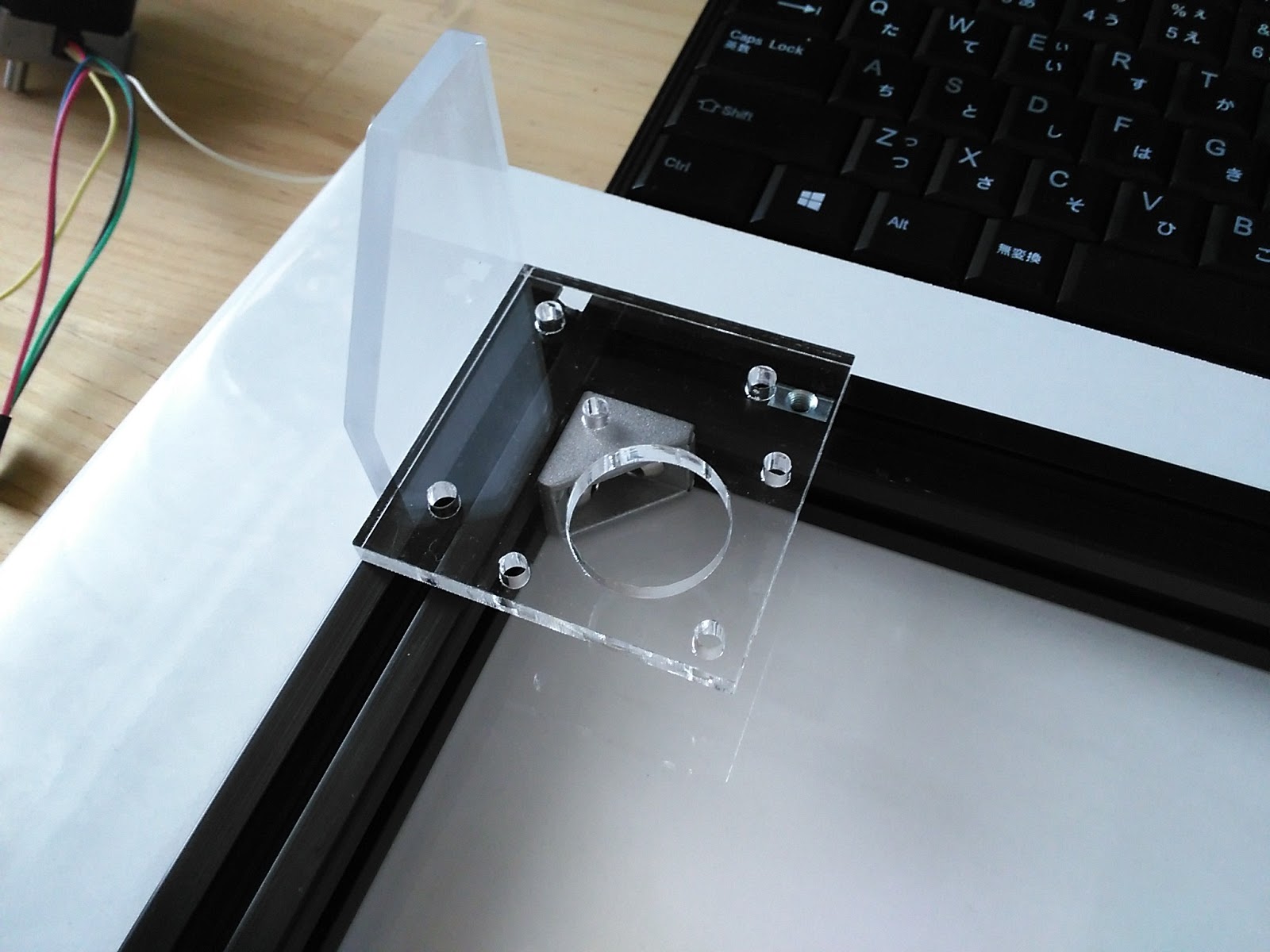
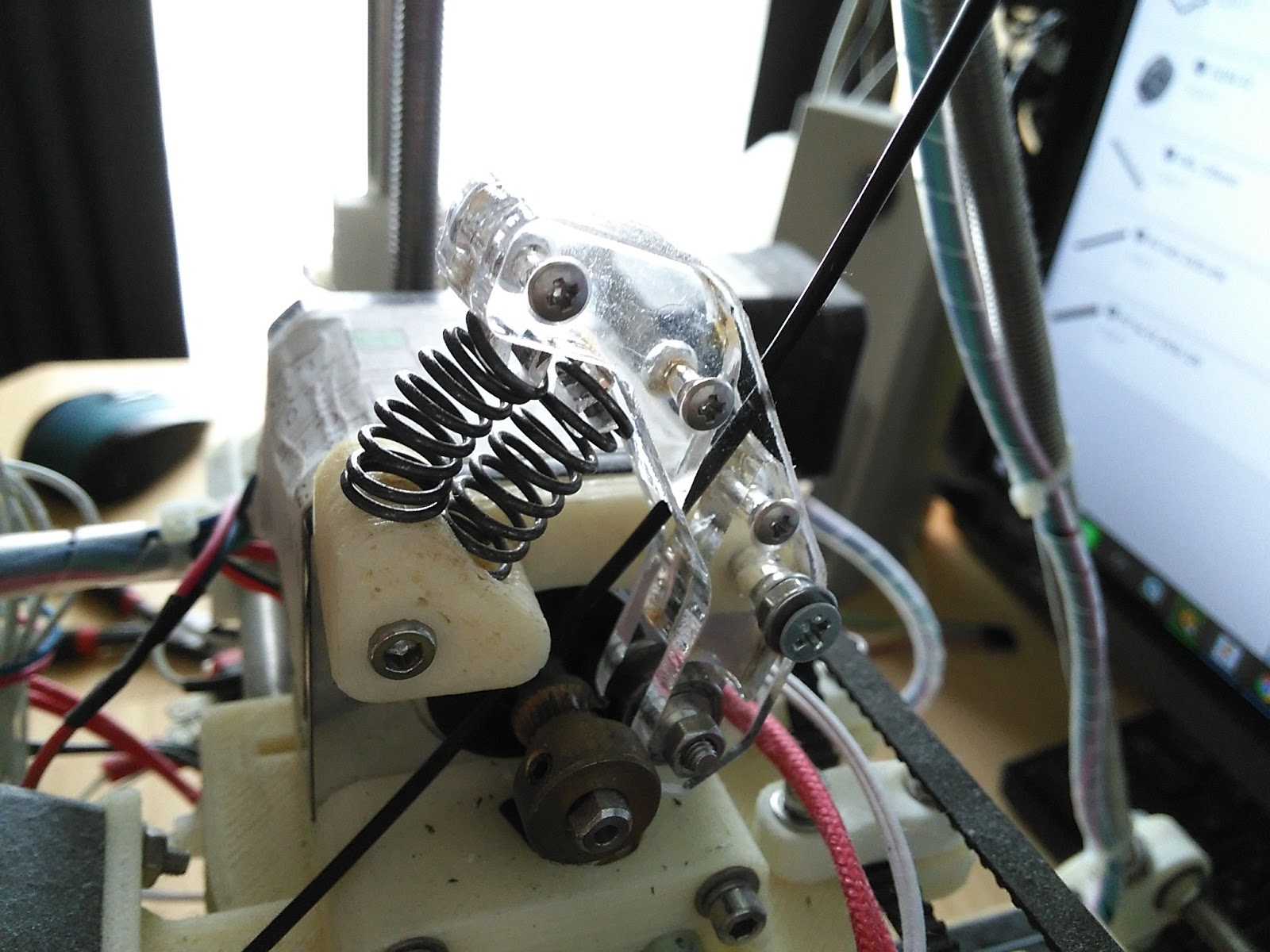
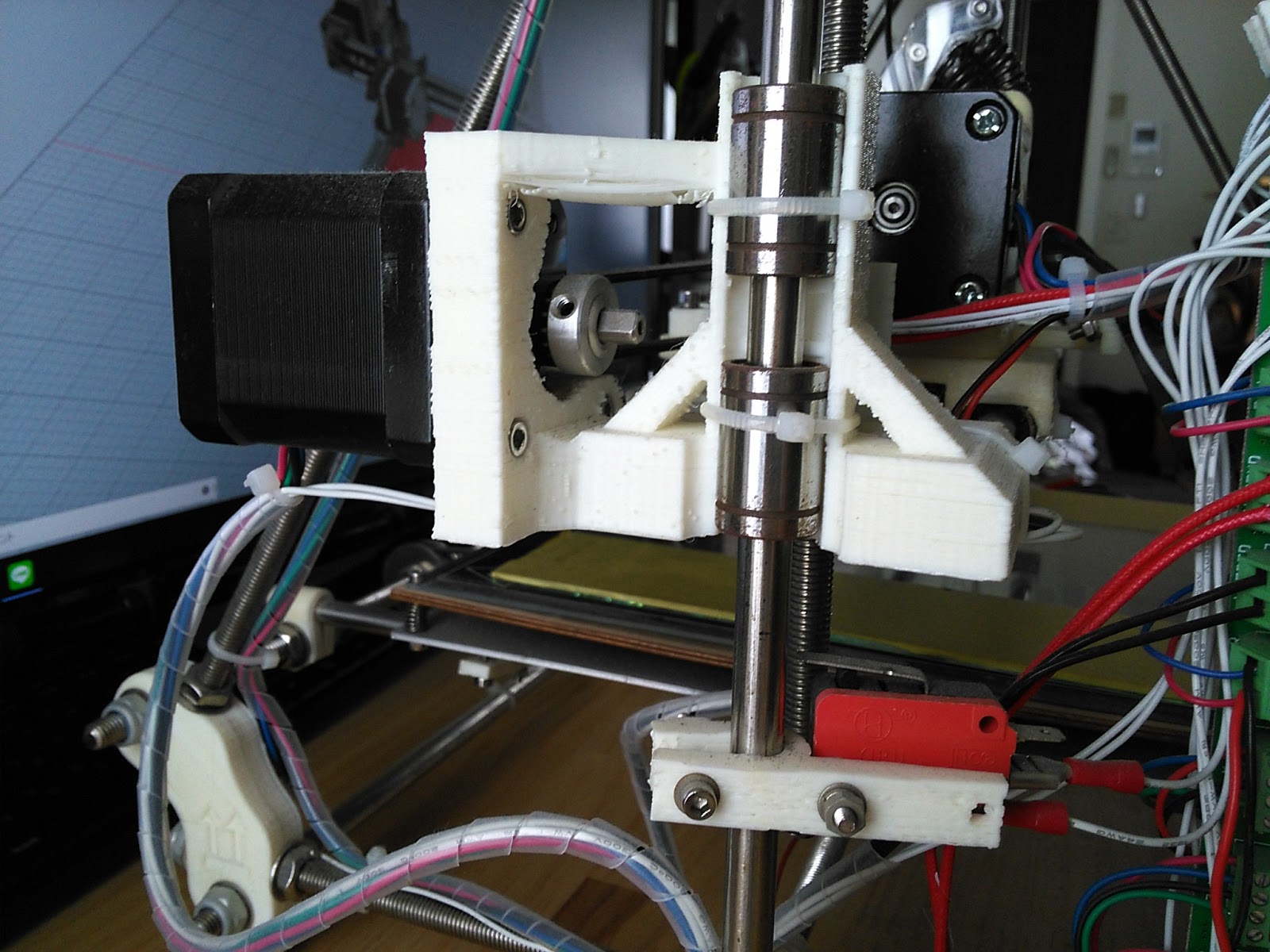
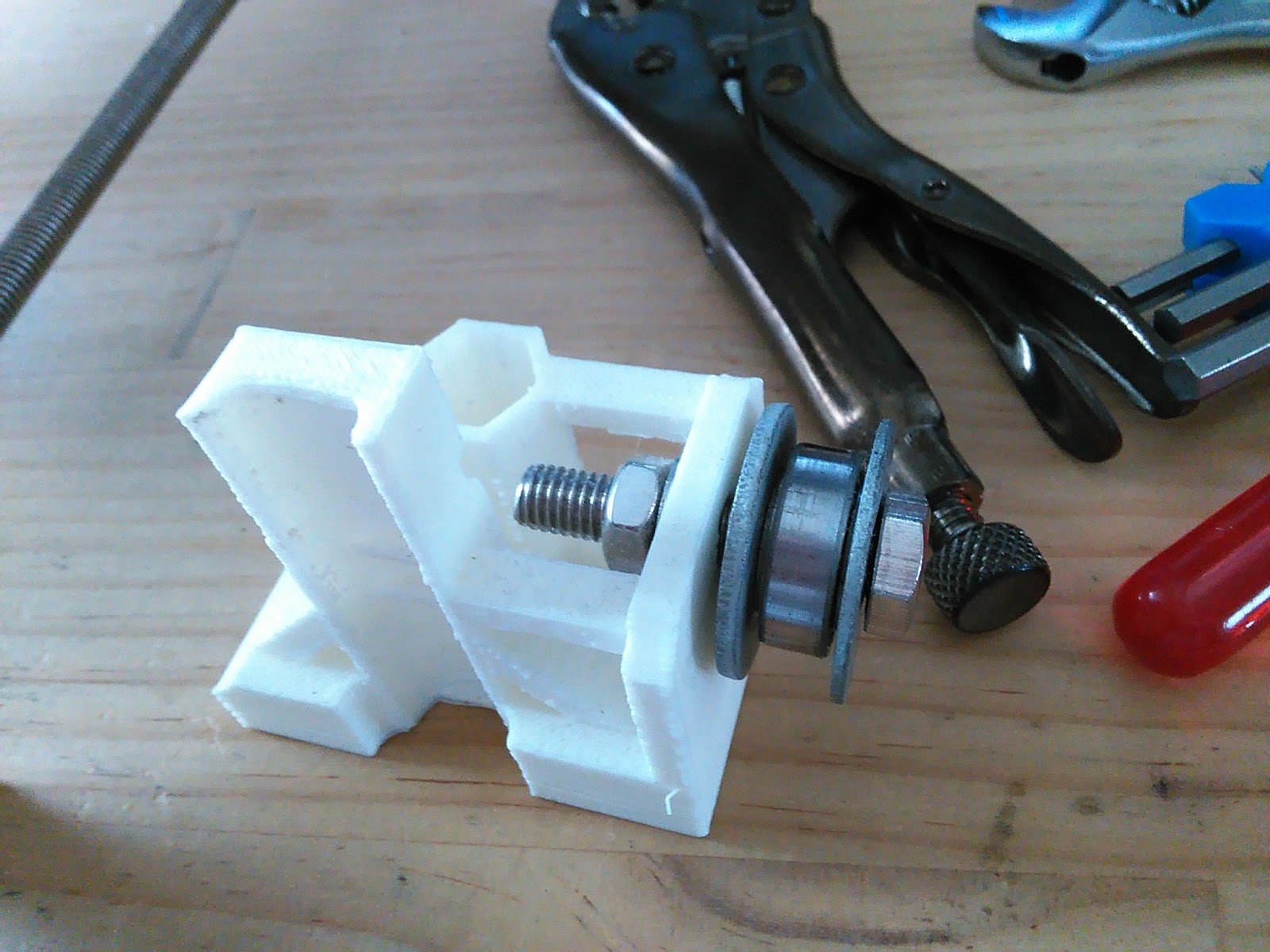
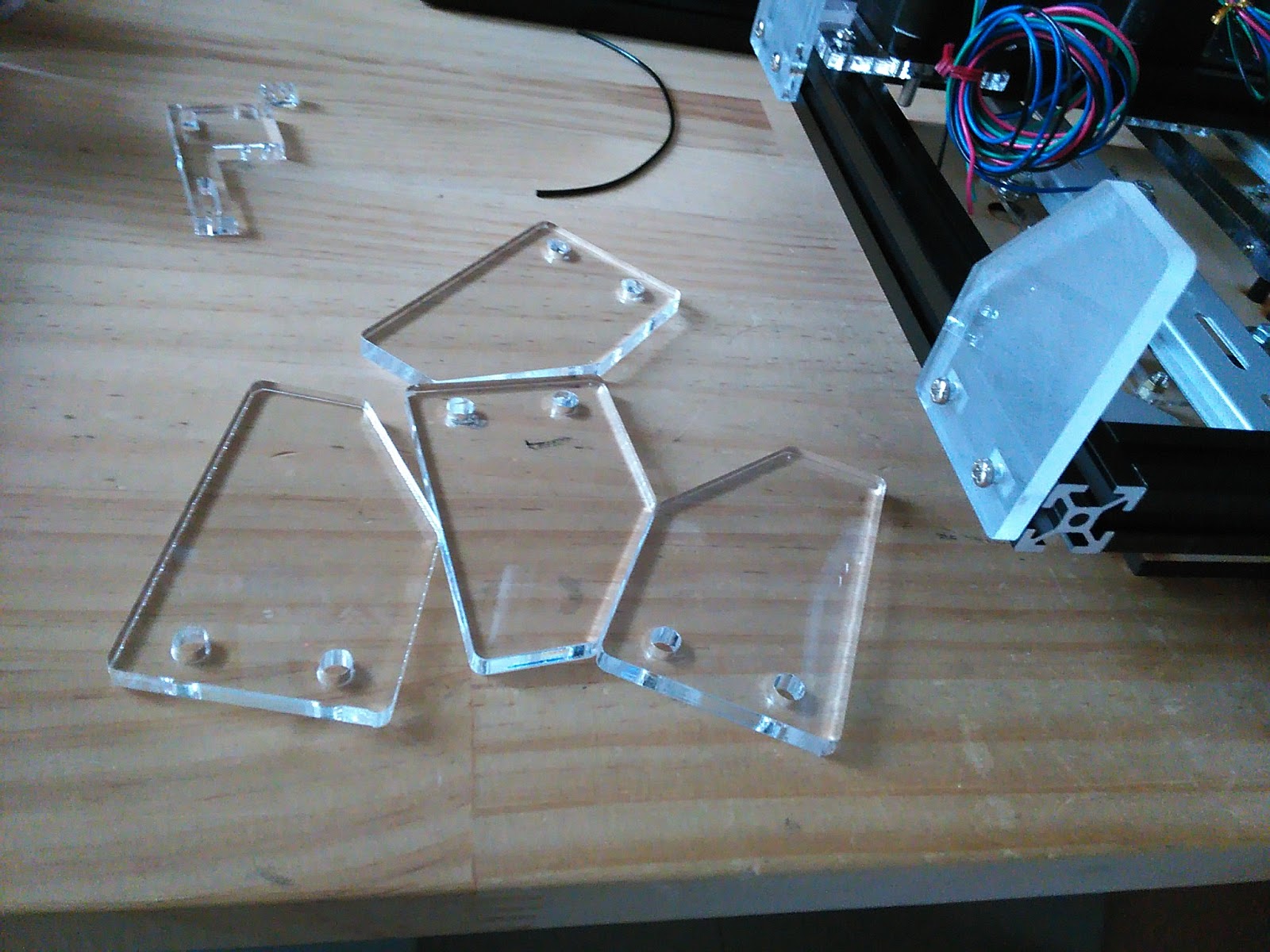
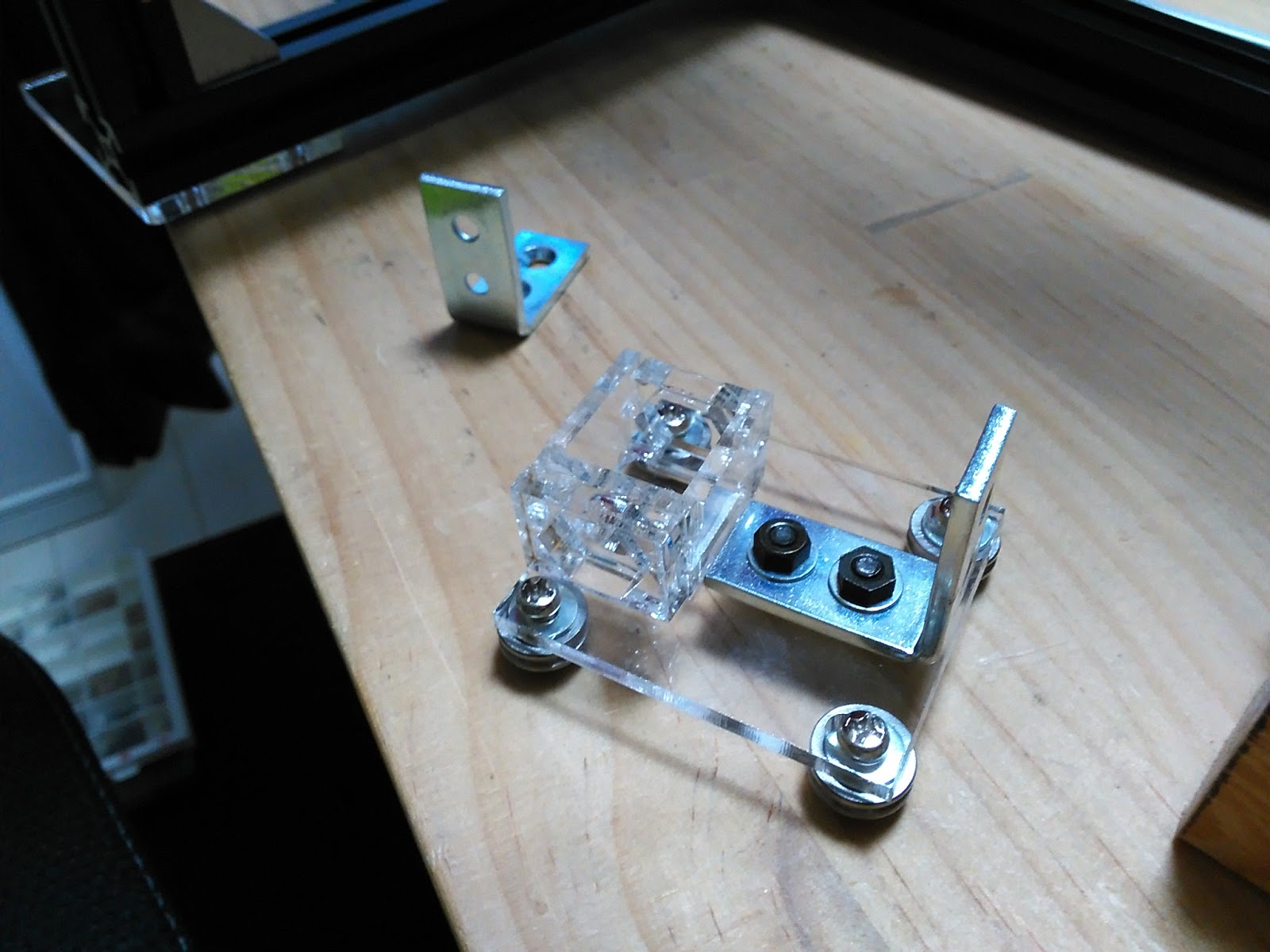
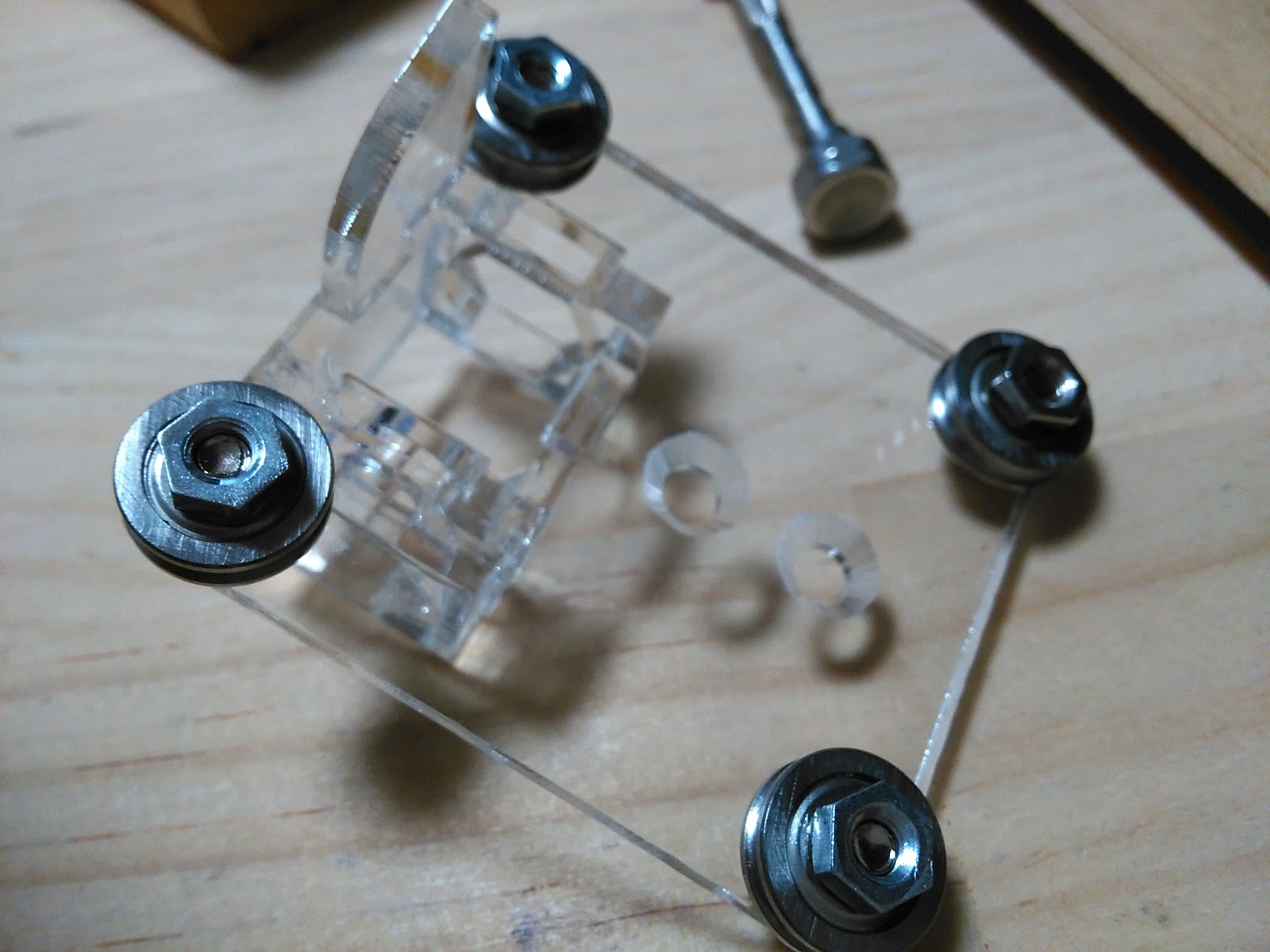
先週作ったこのZ軸用のベアリングホルダ、バックラッシュ防止のためのバネのハウジングを作り込んであります。接着にはDAISOのUVレジンソフトタイプを使いましたが、全く問題なくくっついております。バネの力やX軸の荷重が接着部分にかかるような設計にはしておりませんのでこのまま行ける可能性があります。やってみましょう。
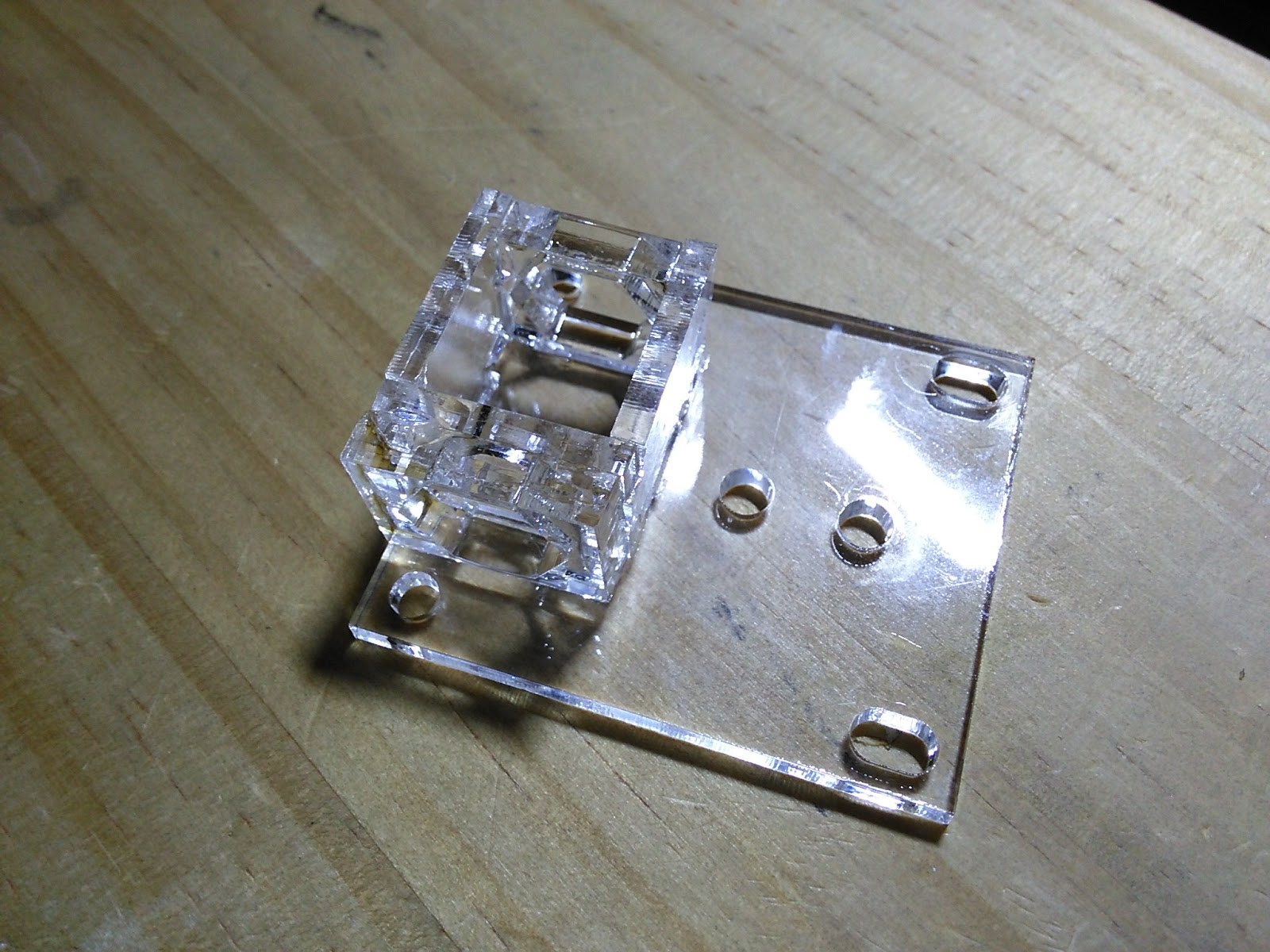
こんな感じ。
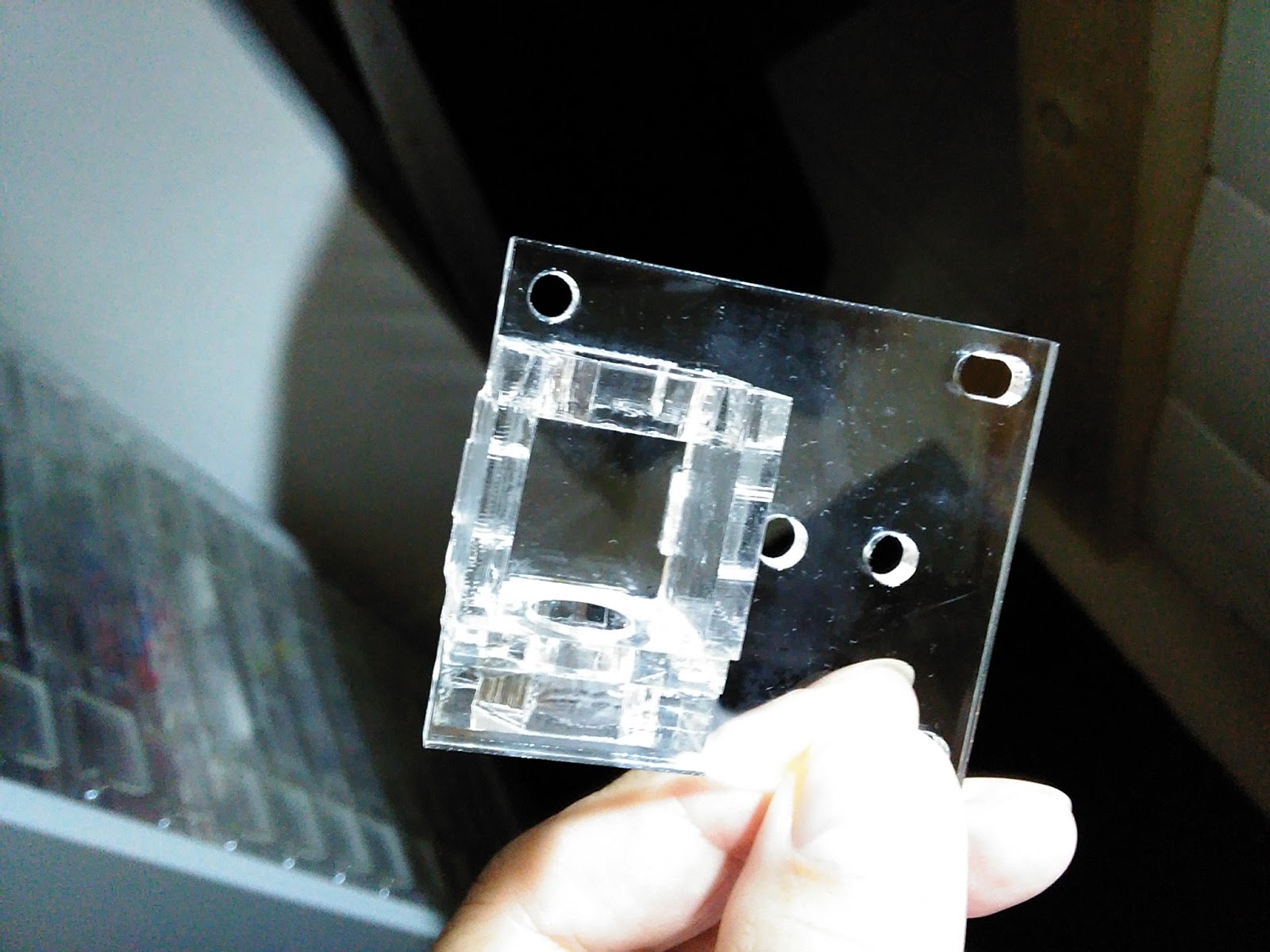
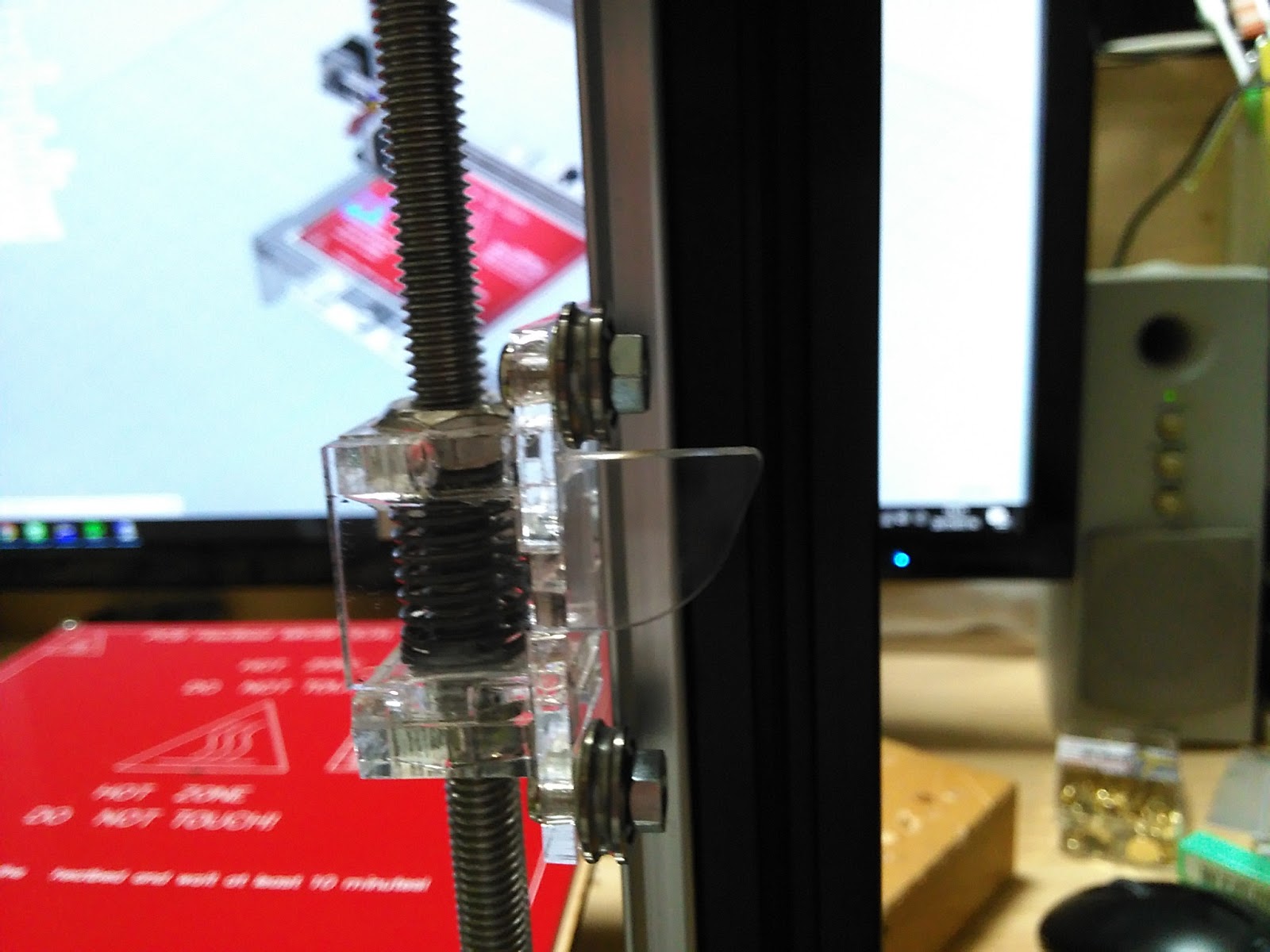
この小部屋の中に押し縮められたバネが入ります。
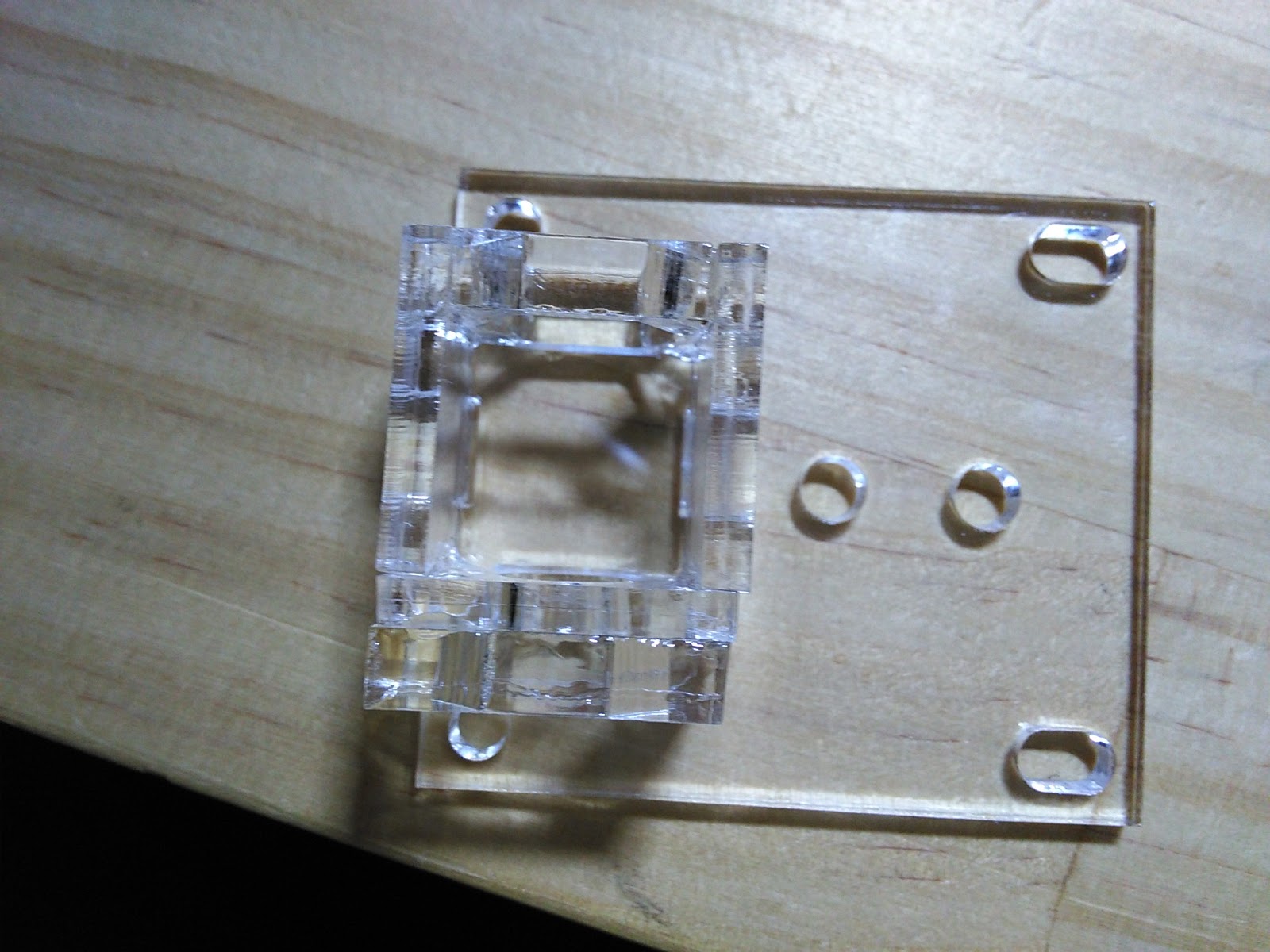
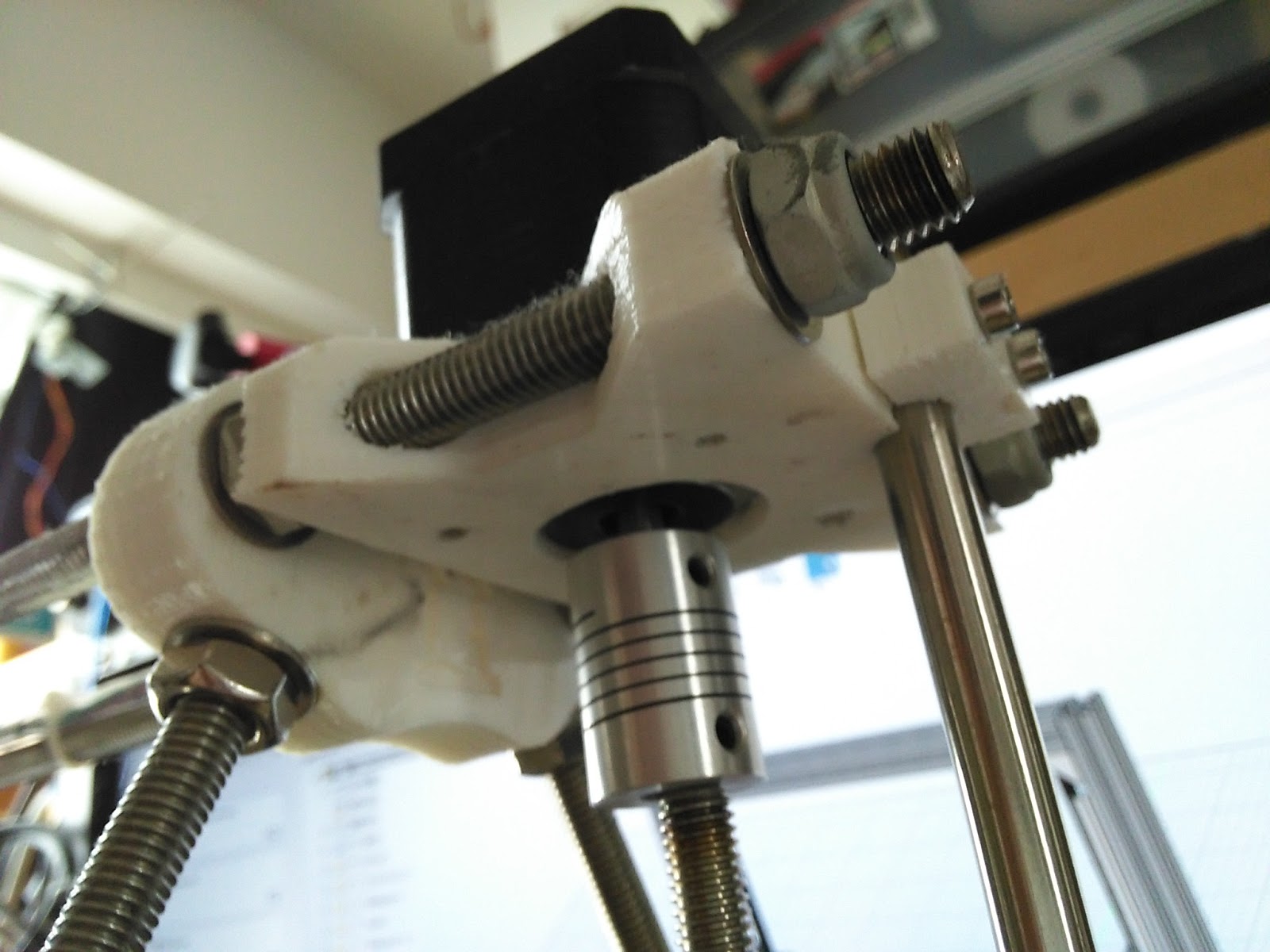
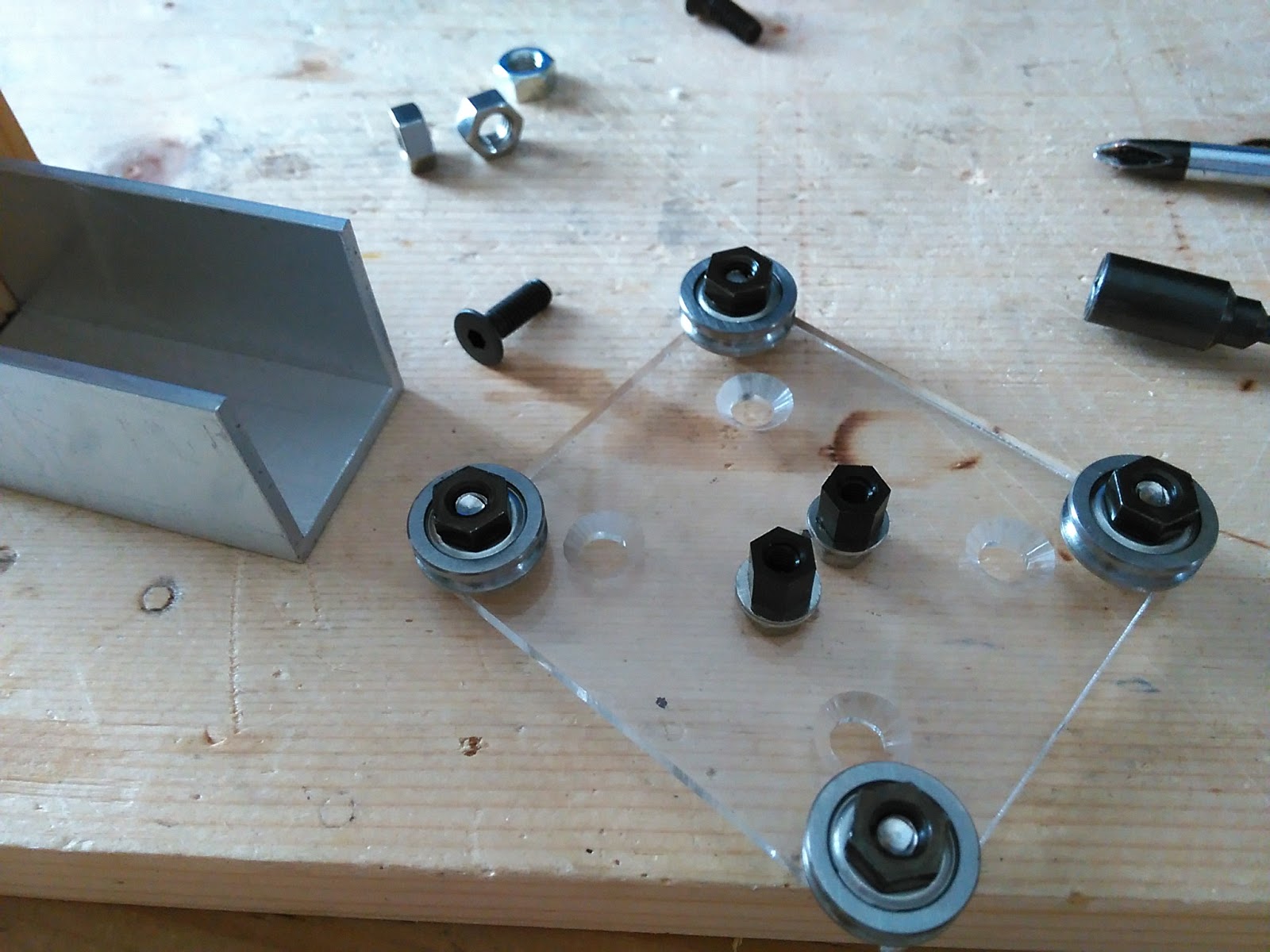
上から。
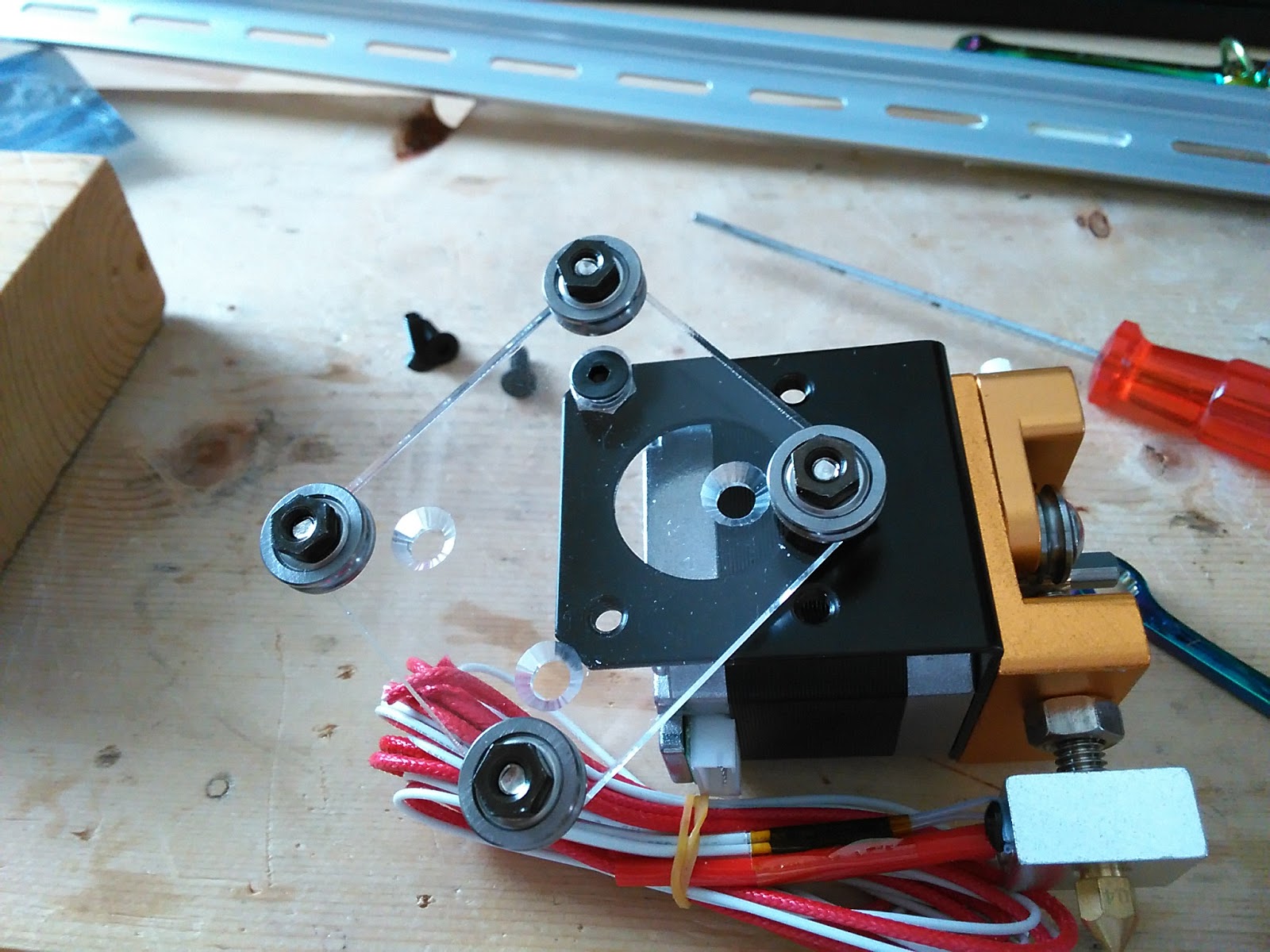
六角形が見えるのは、送りナットと押さえナットが収まるところです。
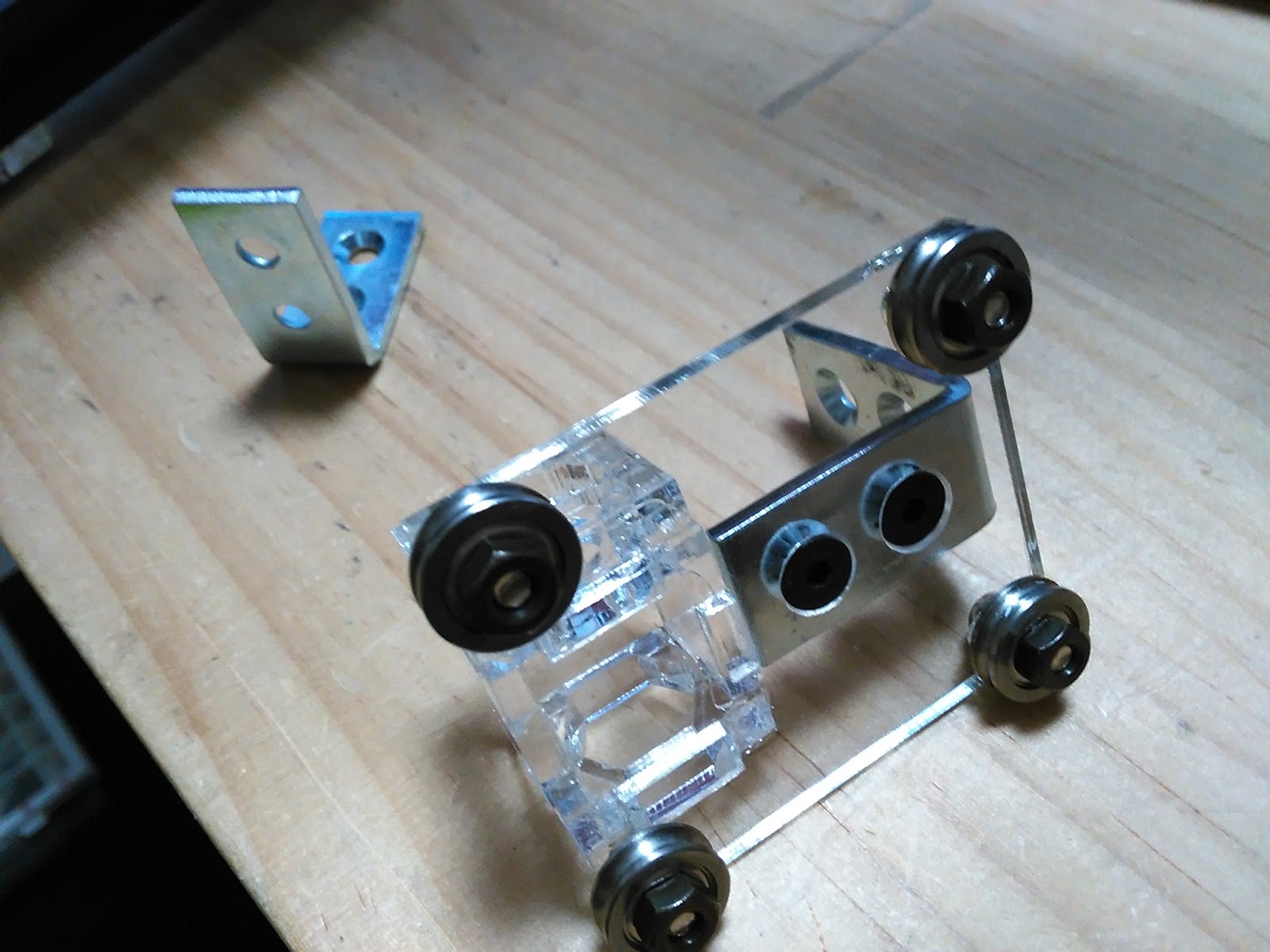
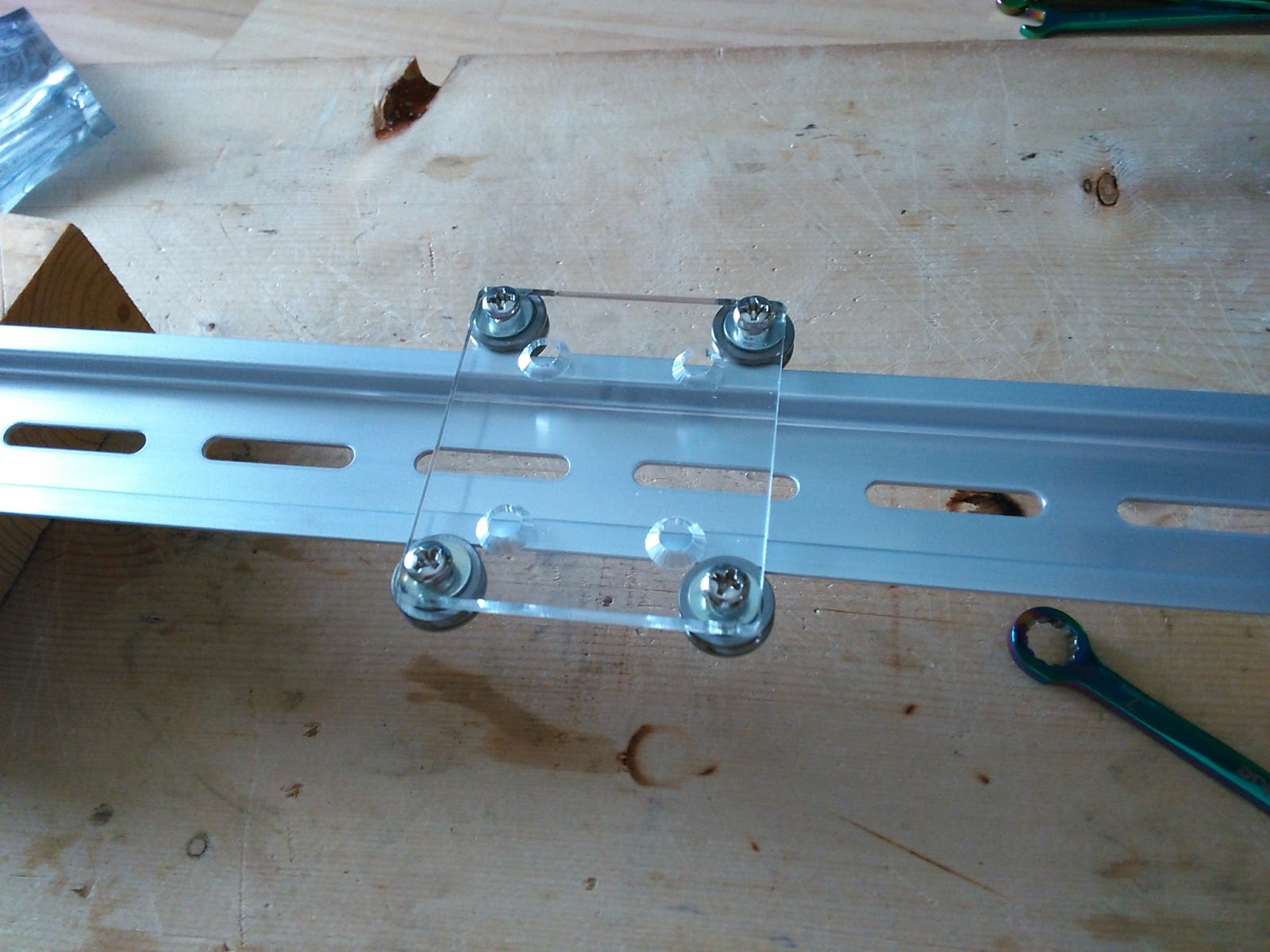
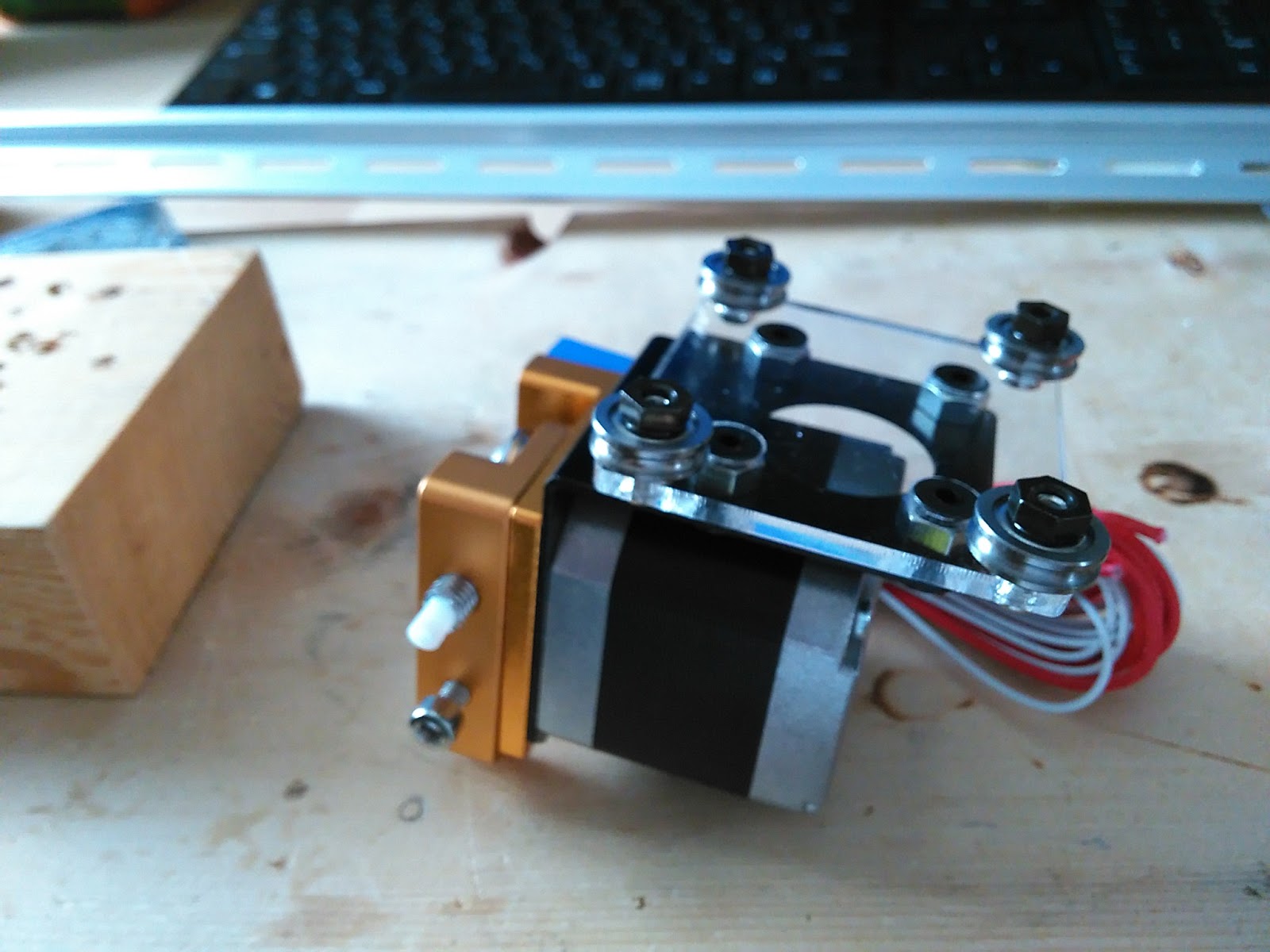
丸溝ベアリングつけて、
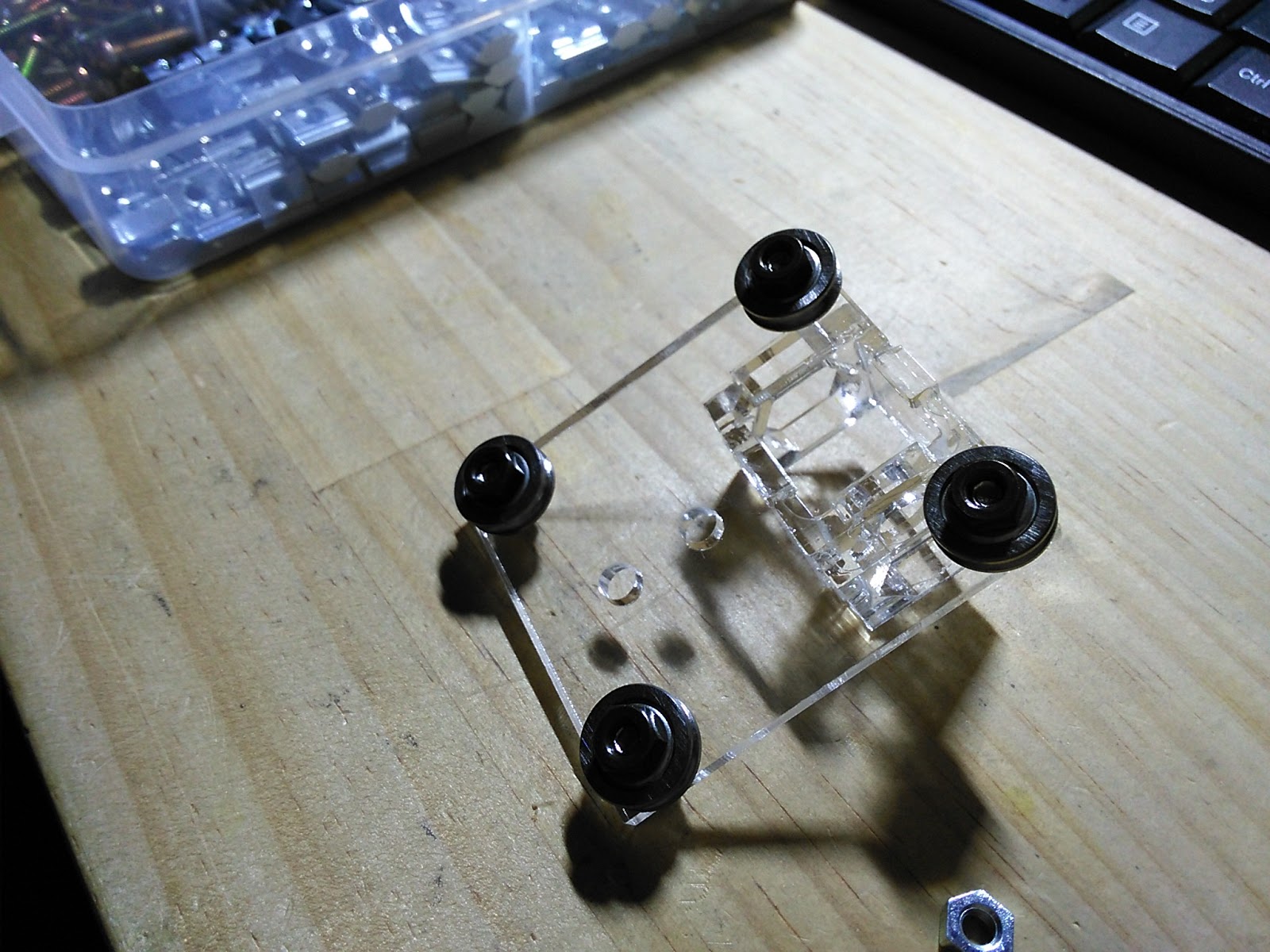
Z軸用の200mmのDINレールに取り付け、遊びが無いように締め付けを調整します。
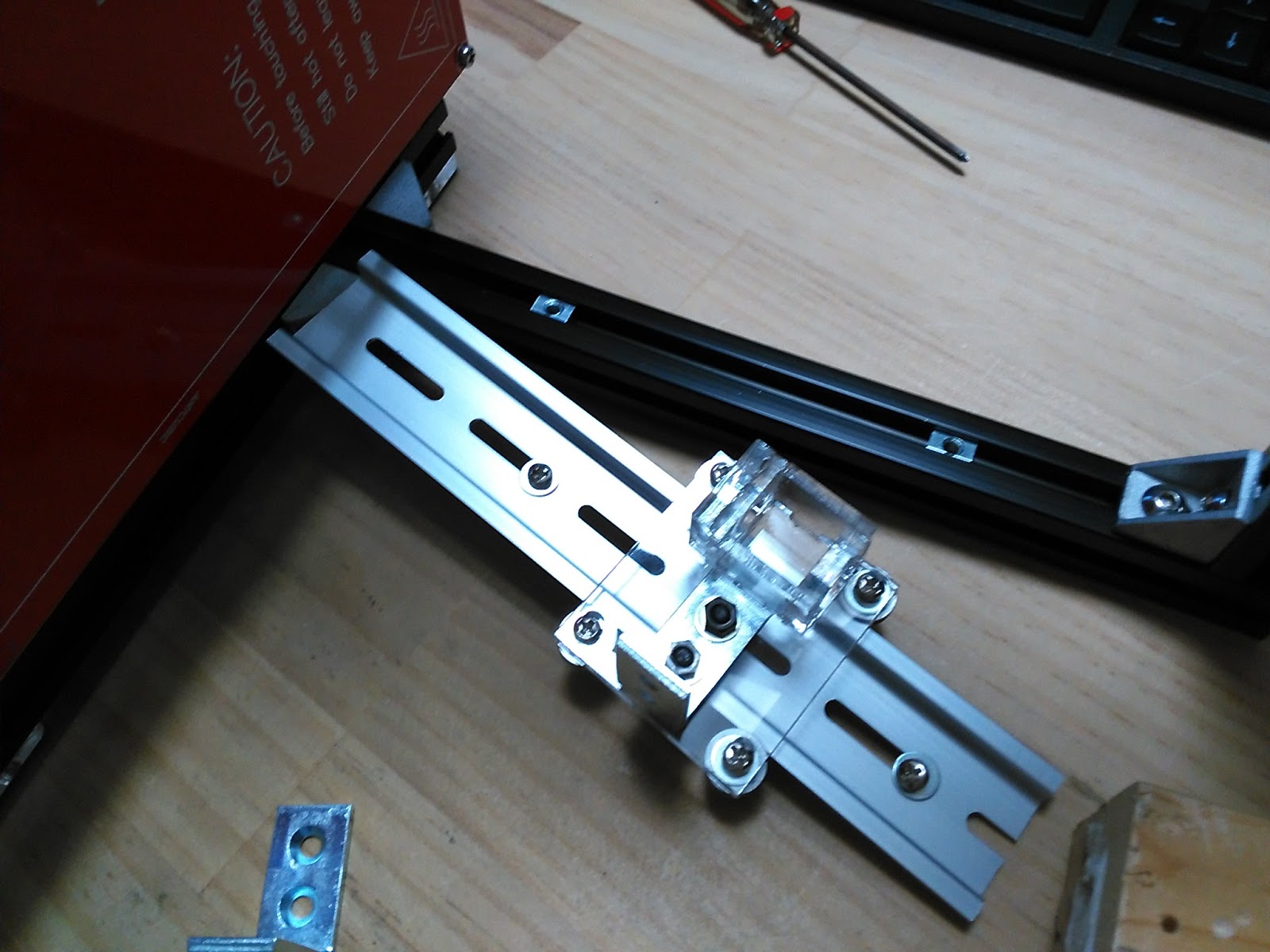
Z軸は左右にそれぞれありますので同じようなものを二本作ります。
外した門に、

ネジ二か所で固定します。
両側に取り付けました。

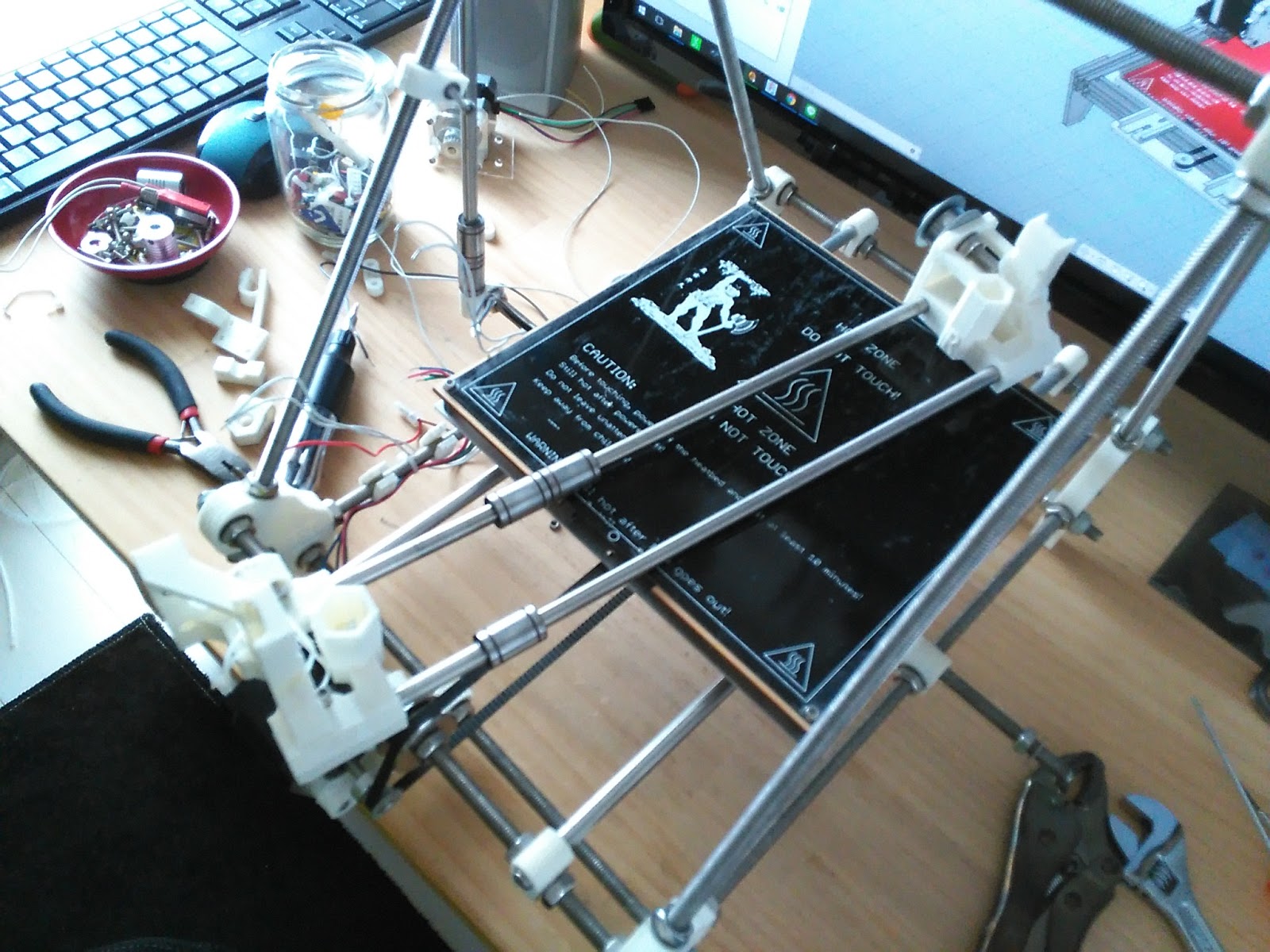
スライドの具合を確認します。

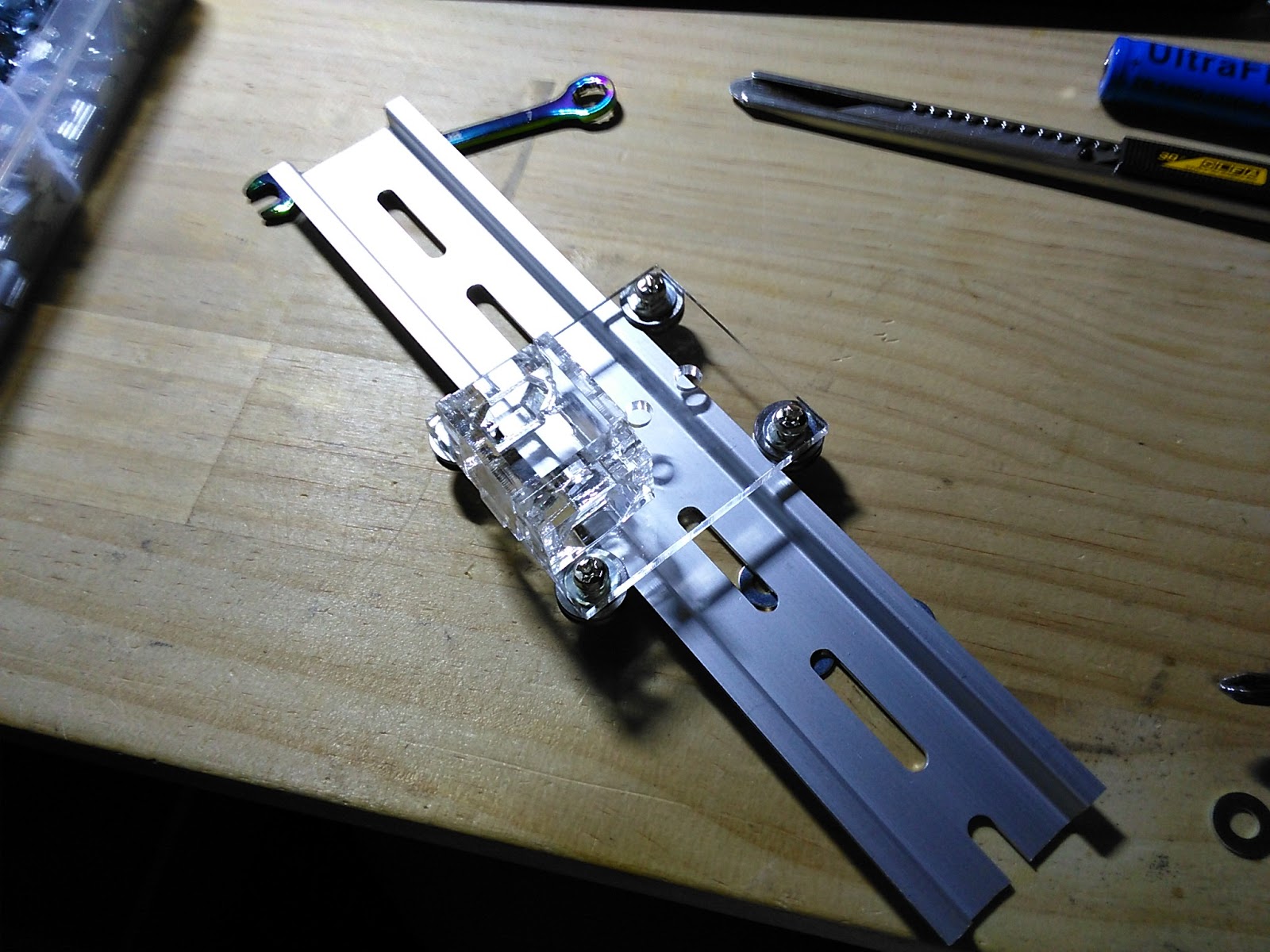
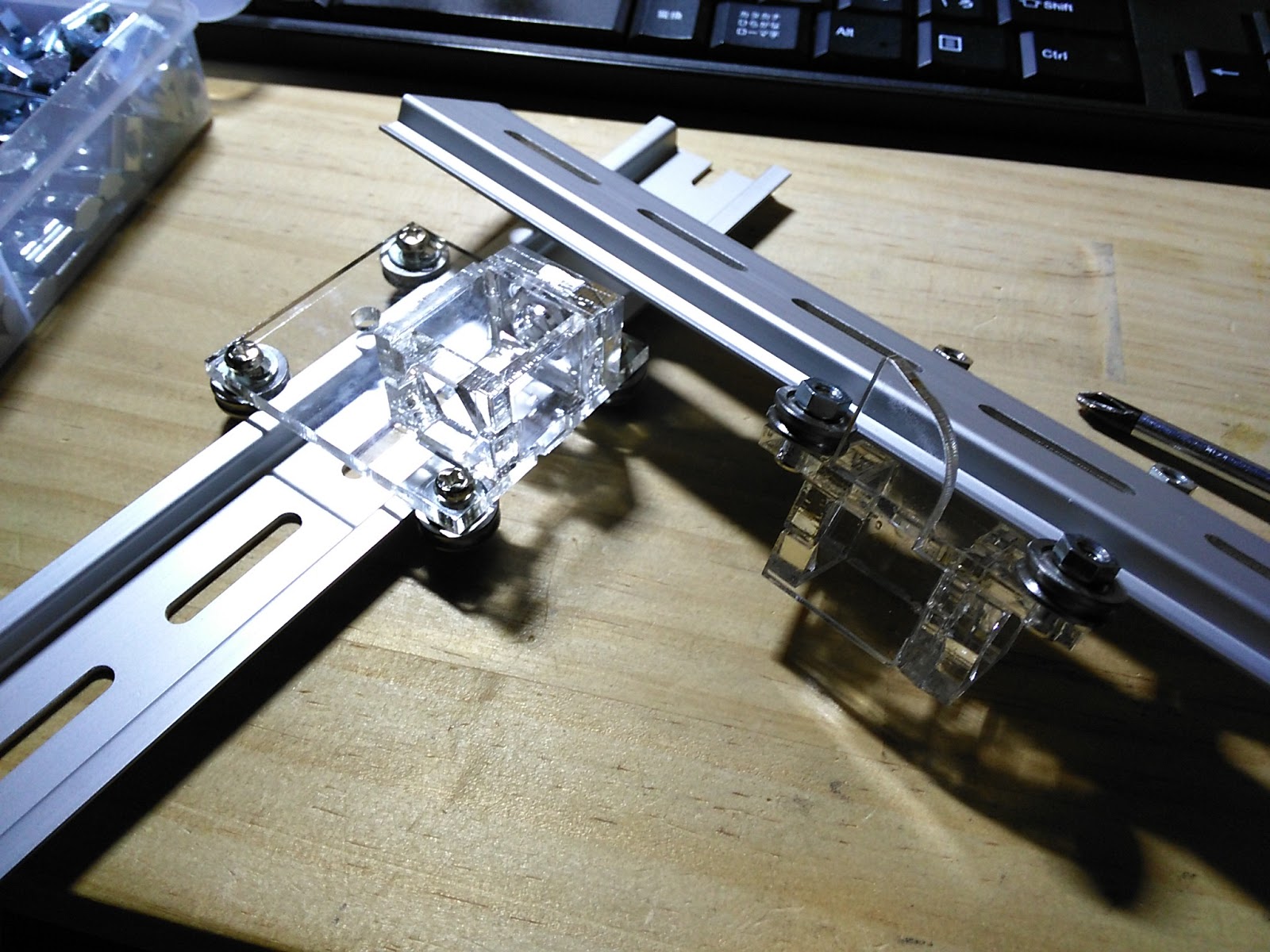
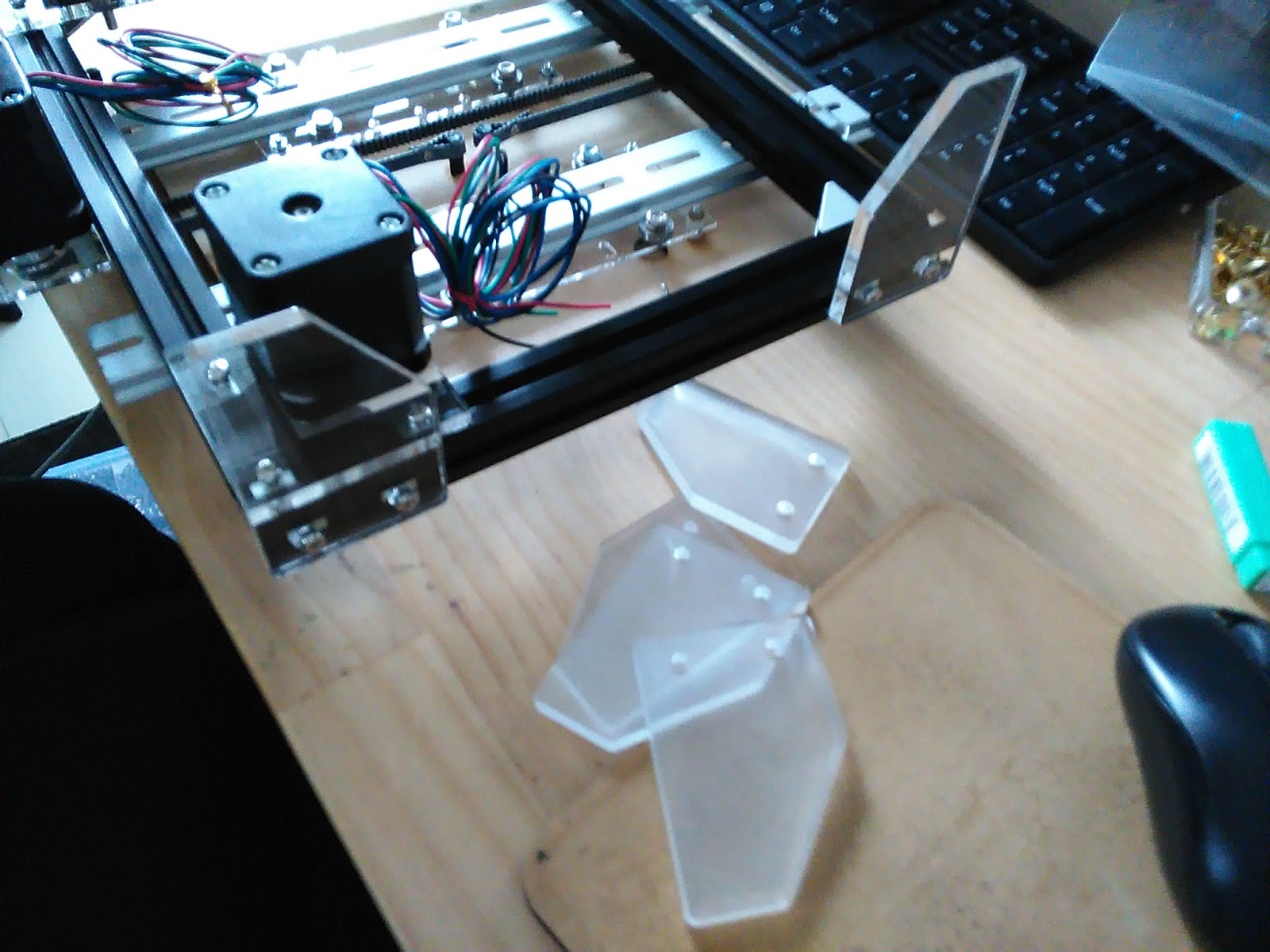
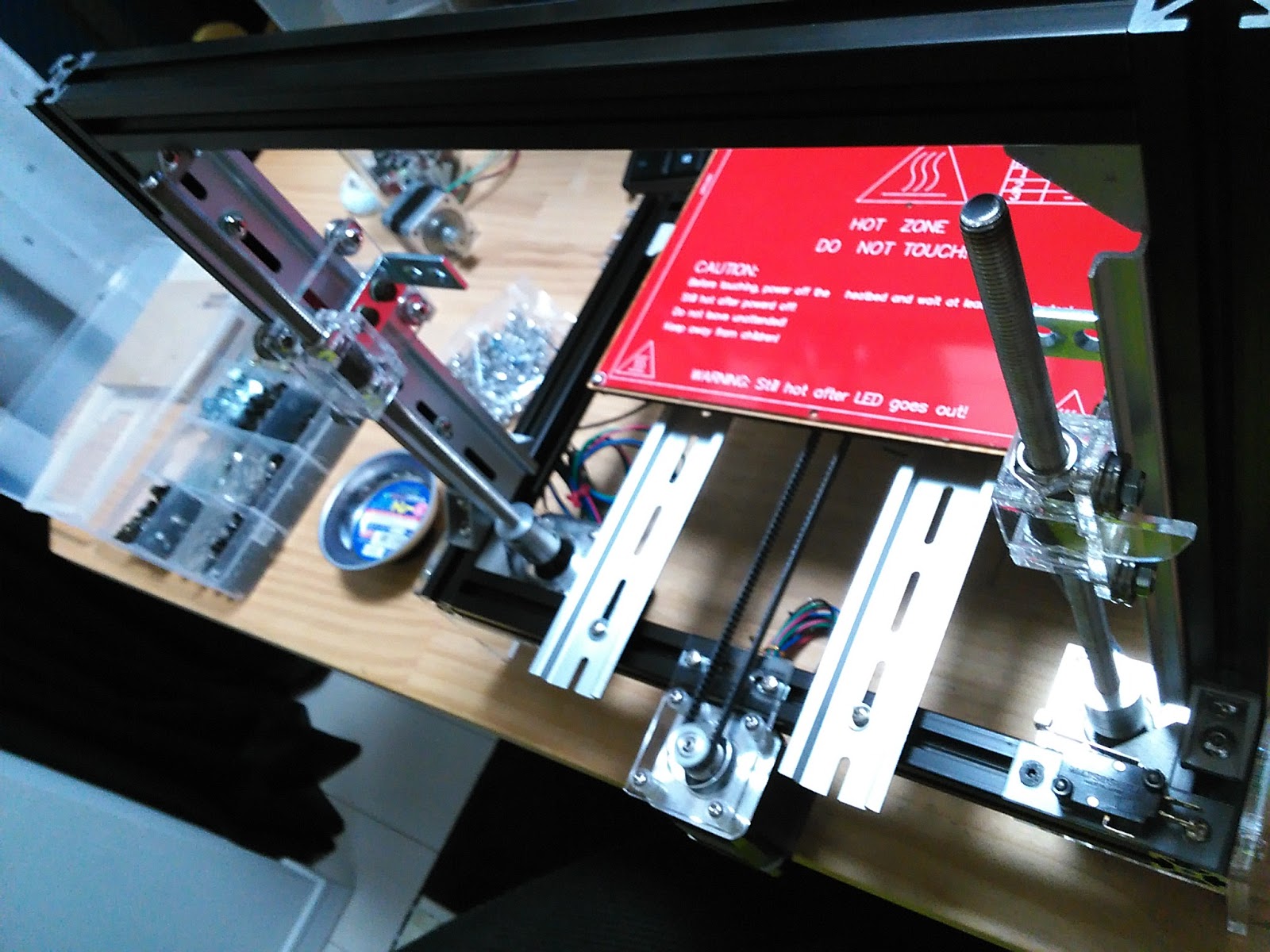
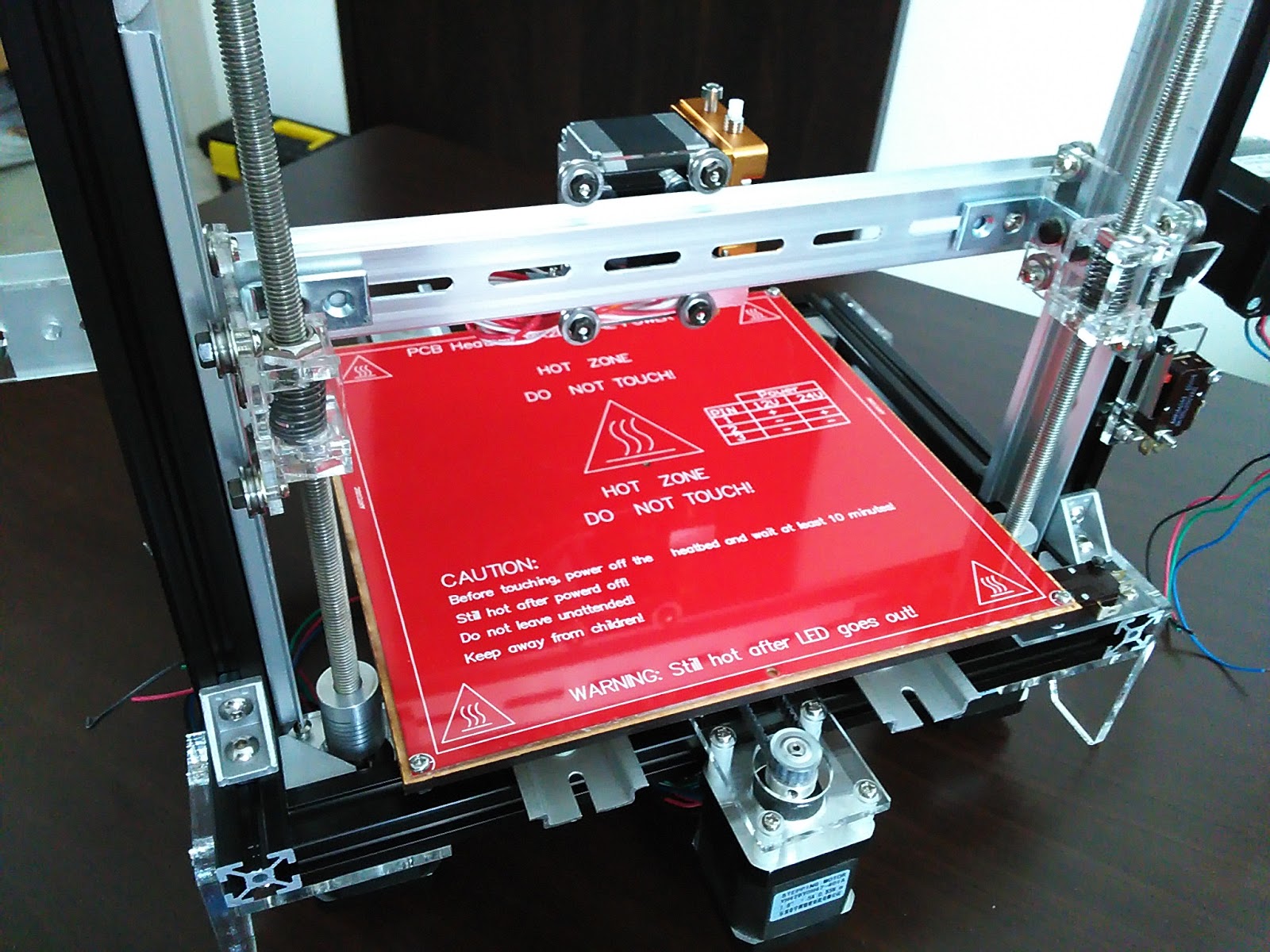
ベースの上に軽く止めてみます。いい感じですね。
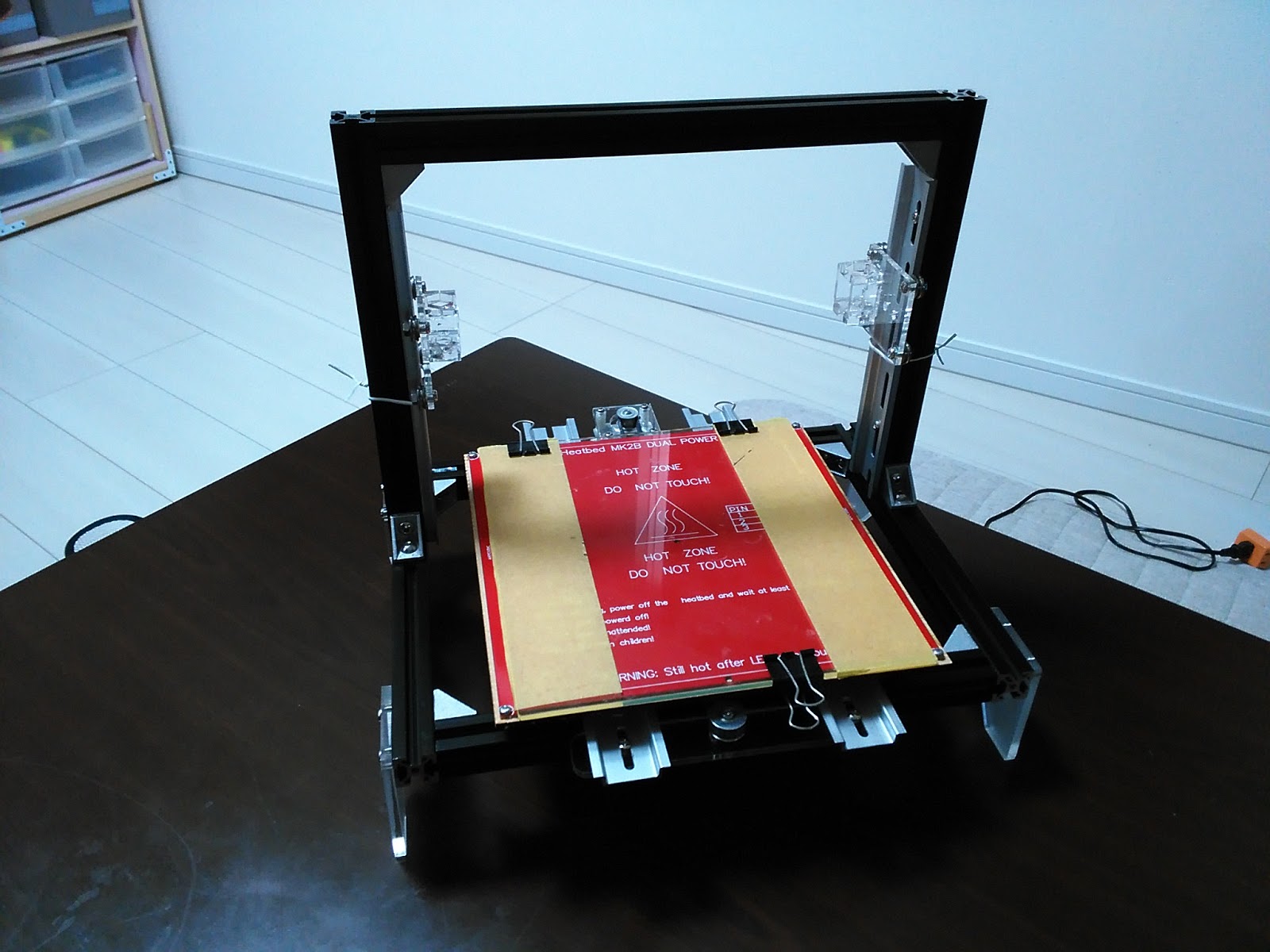
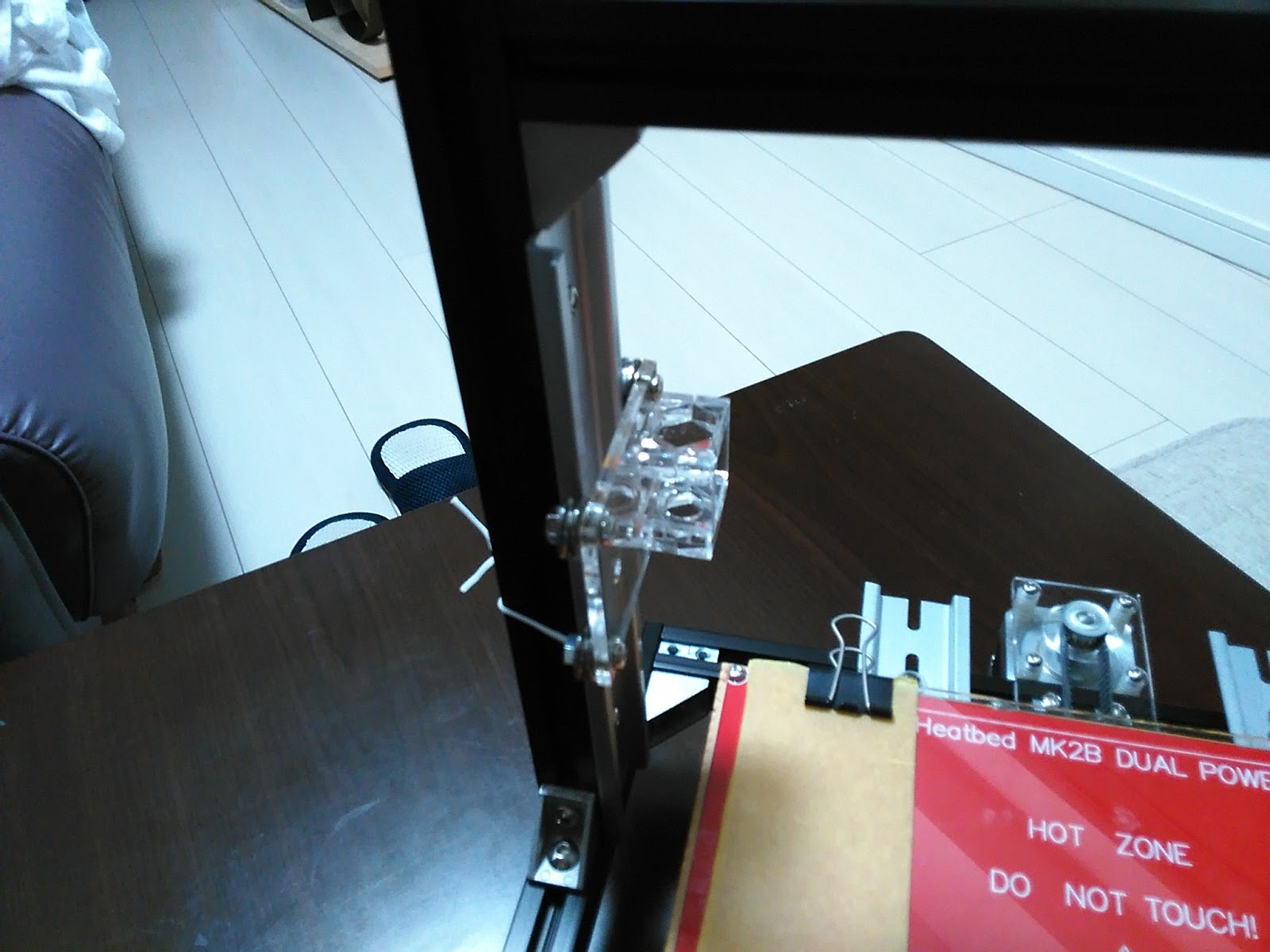
DINレールスライダーがあまりにスムースなので、

こうやって縛っておかないとキャリッジが下におちてしまいます。
致命的な考え間違いがないことを確認できたら、一旦全体をばらします。

ばらしたのは、ベースにZ軸用のモータ二つを取り付けるためです。
モータマウントのパーツはすでに切り出してあります。
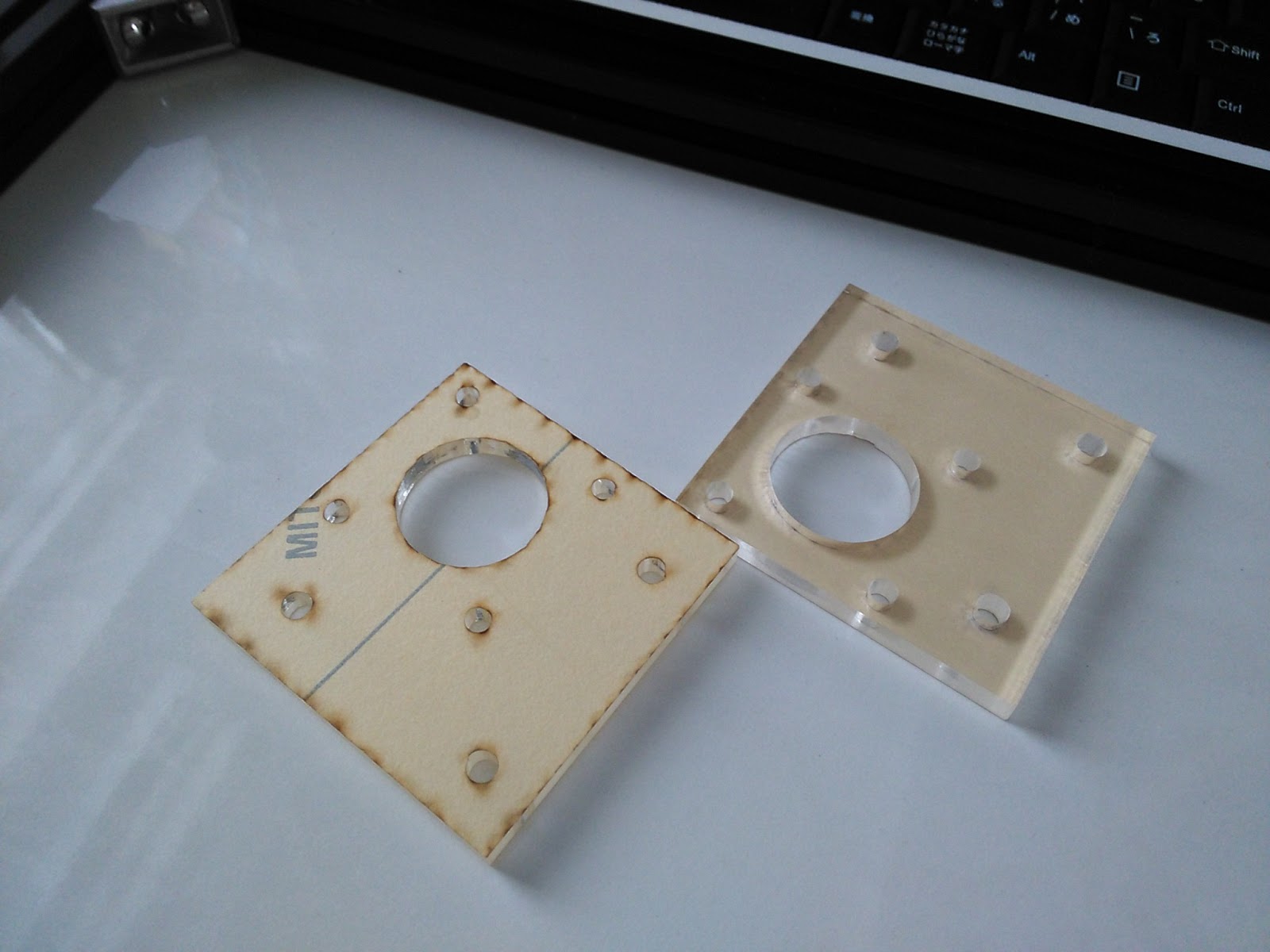
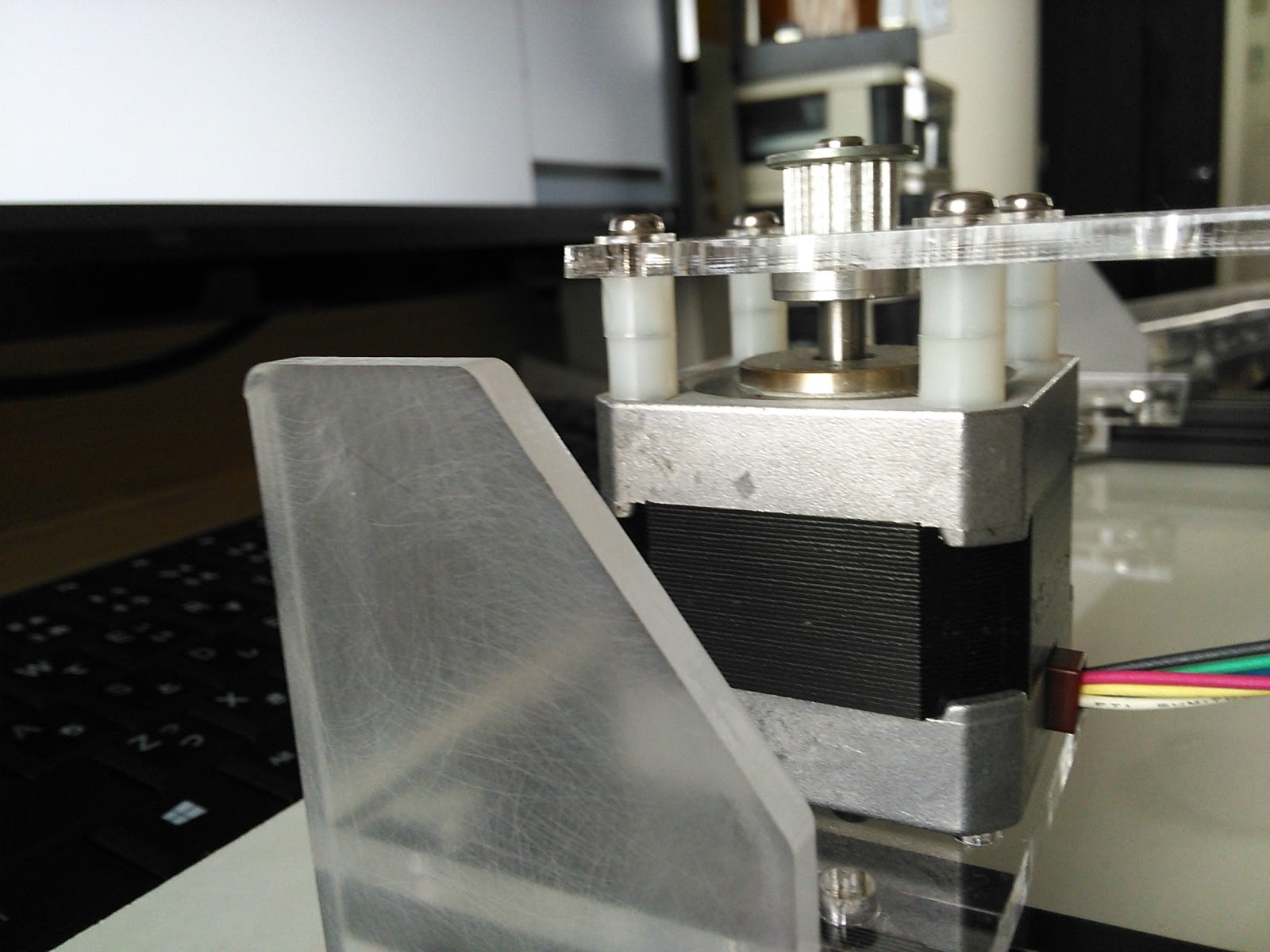
このような感じでモータを取り付けます。
が、手持ちの両軸が出ているモータでは軸が長すぎて使いにくいです。
….ということで、ついにこの時が来てしまいましたが、これまで活躍してきた3Dプリンタさんを分解してモータを流用することに。
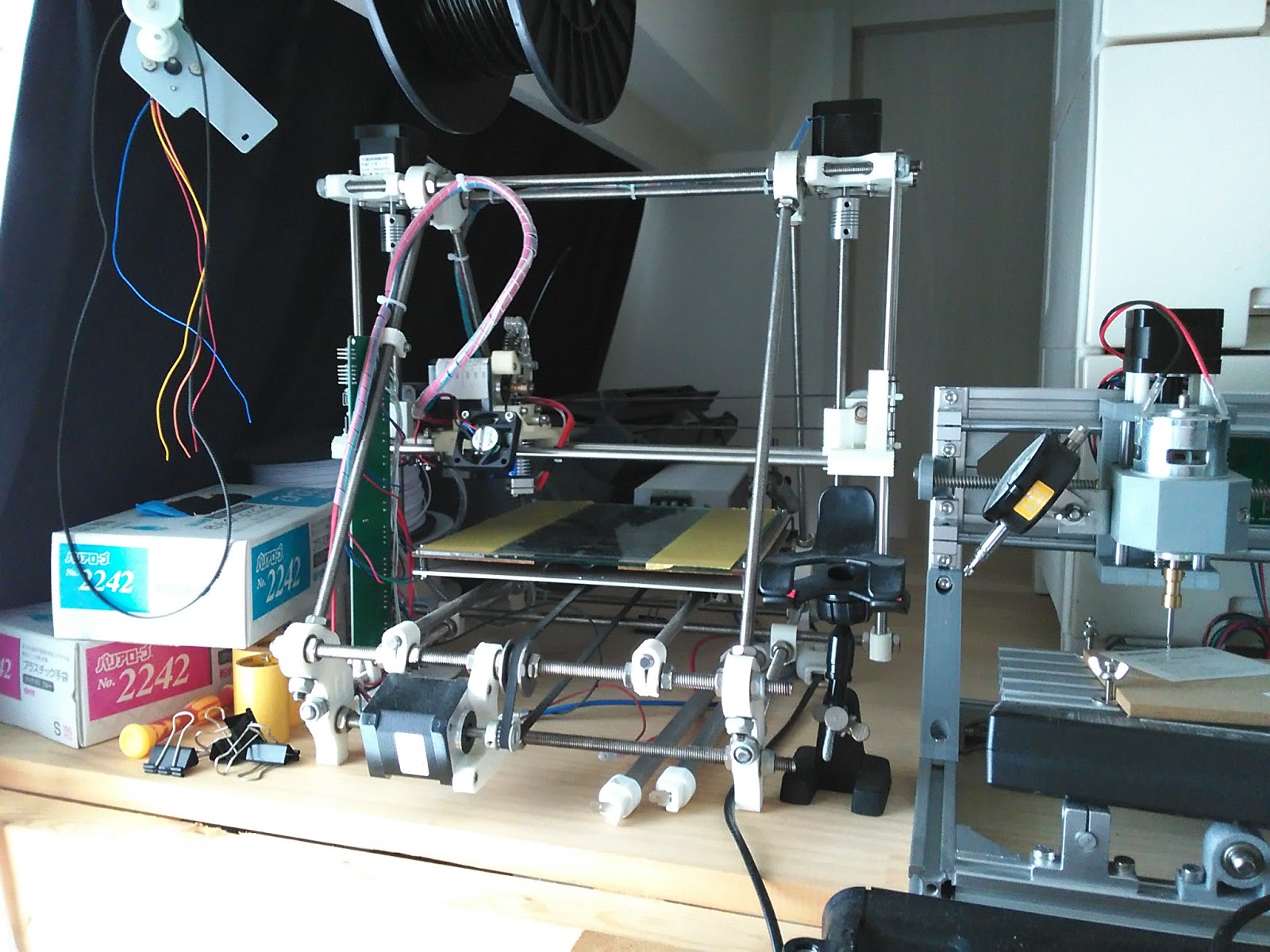
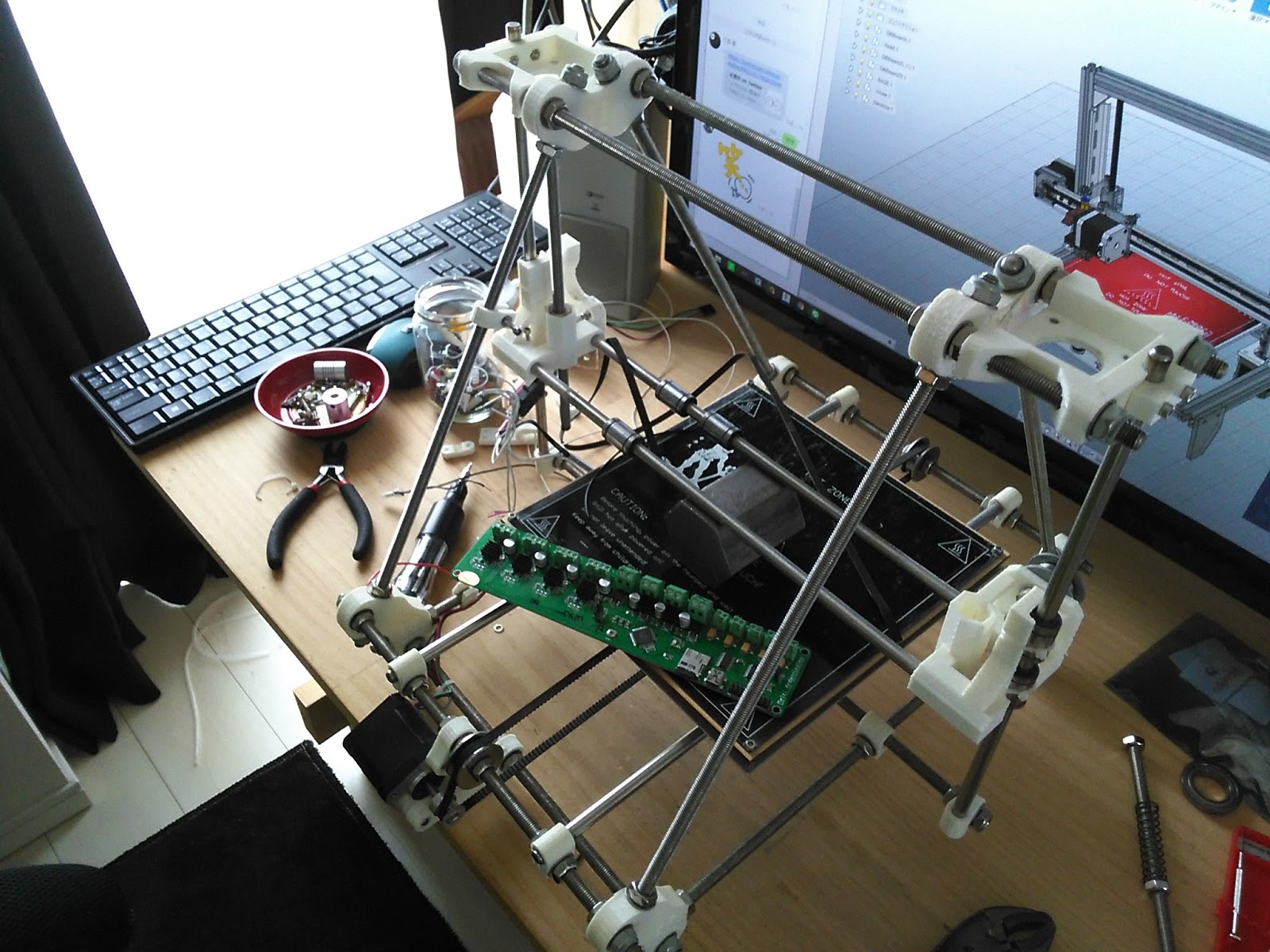
満身創痍、複数回の大手術を乗り越えてこれまで実に様々なパーツ作成に活躍してきた3Dプリンタさんですが、ついにその役目を終える日が来ました。
しかしながら、使えるものは全部移植しますので、引退というよりもむしろ強化かもしれませんね。義体化というところかな。
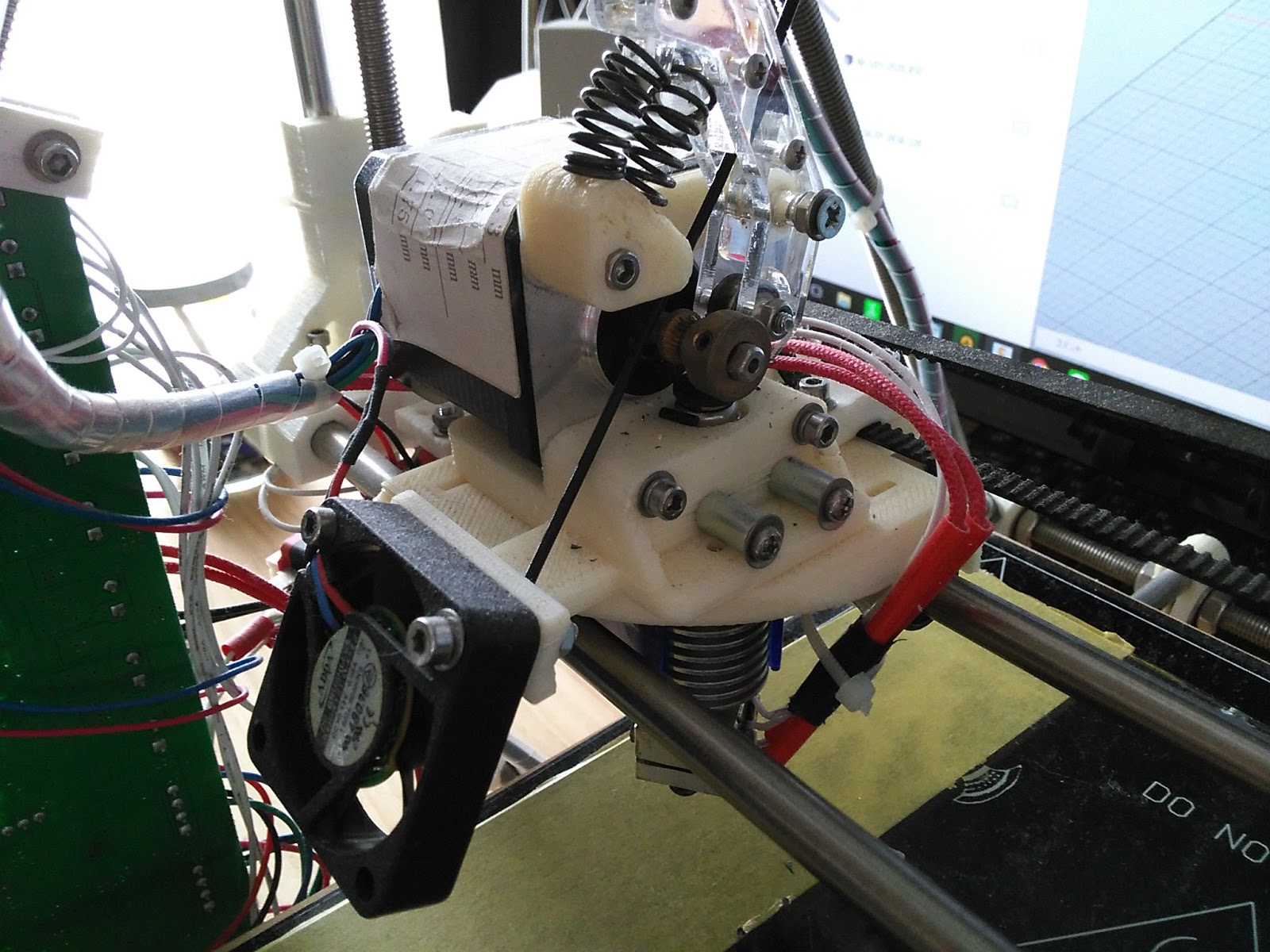
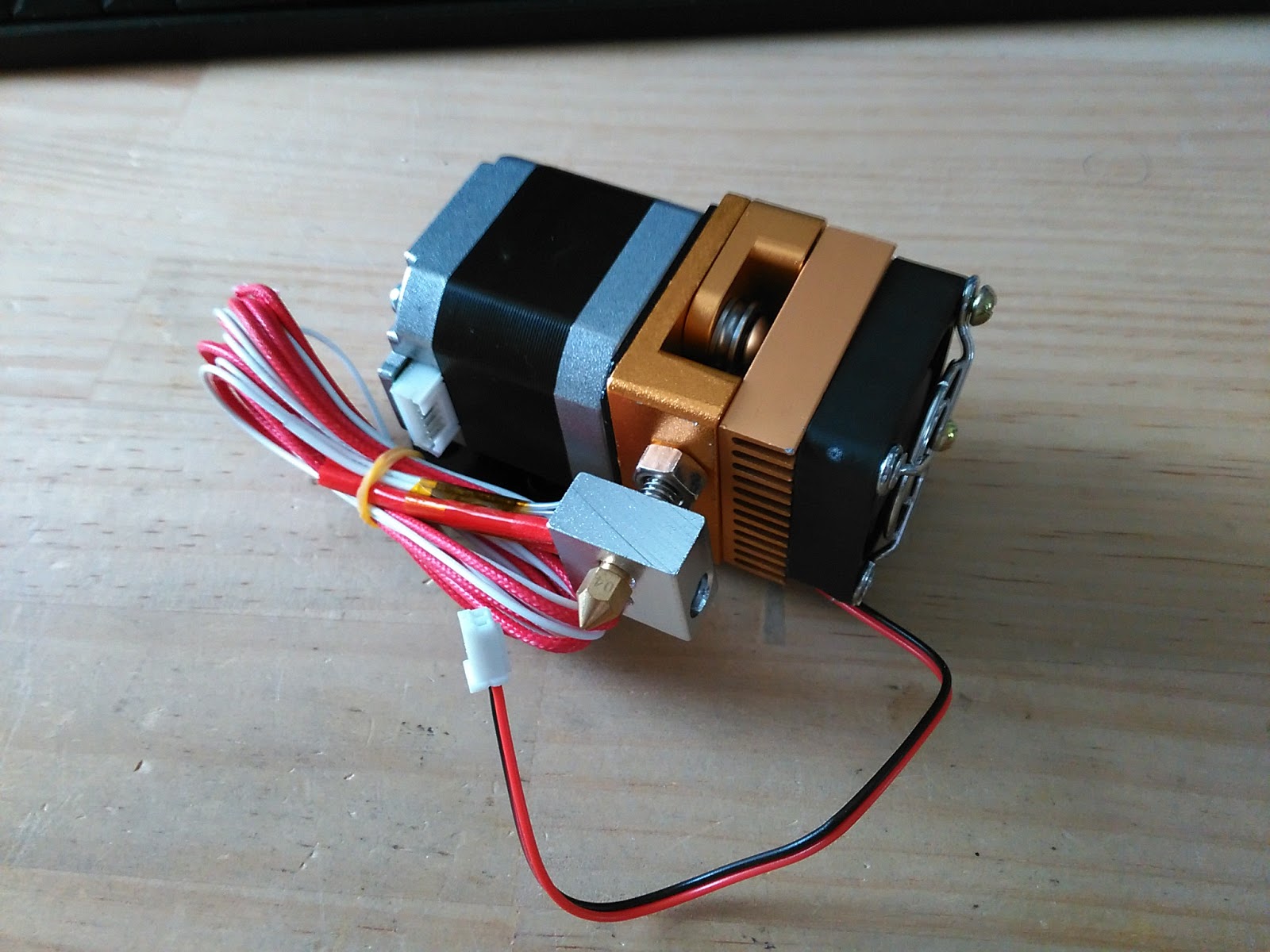
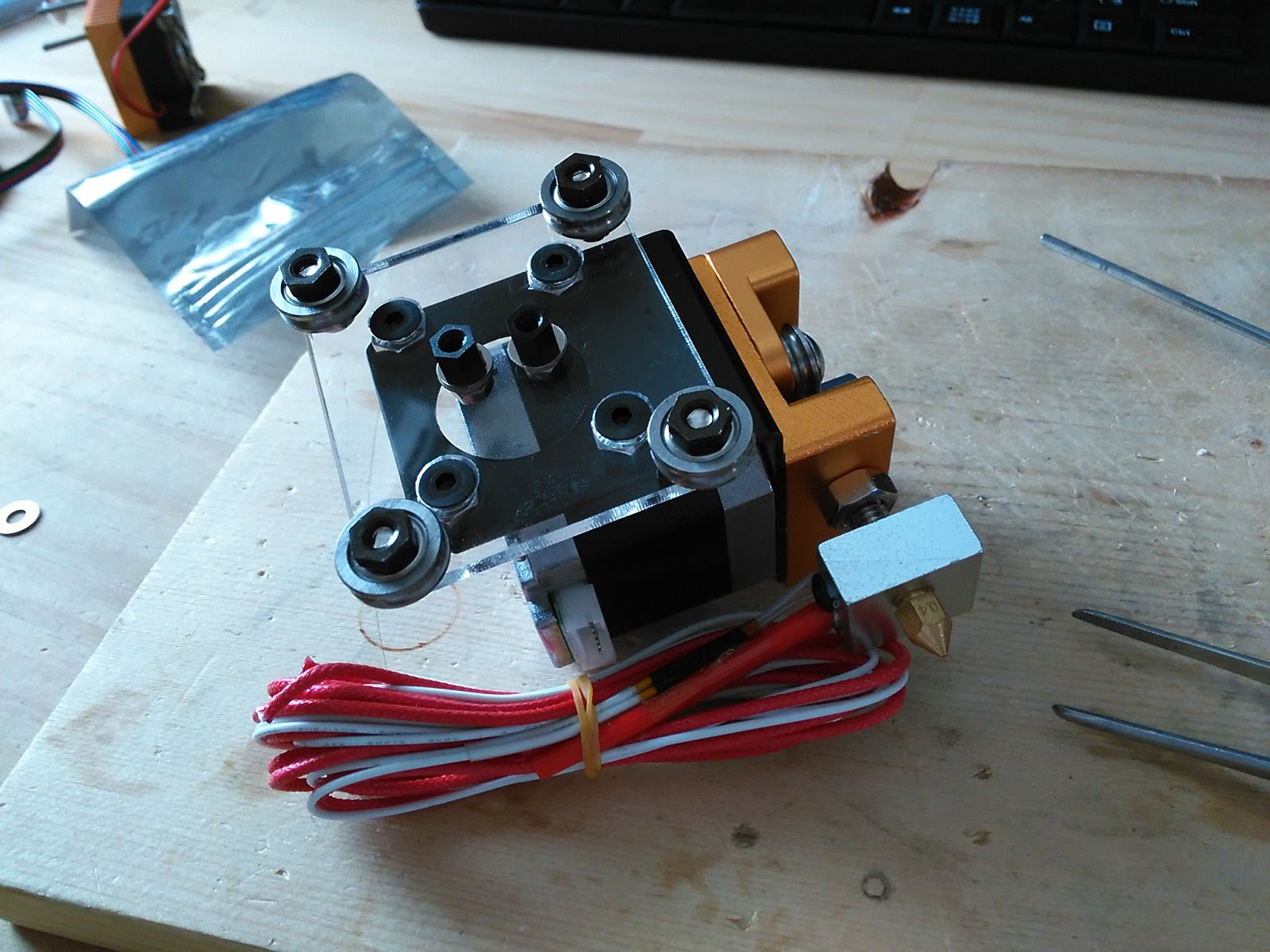
このJヘッドタイプのエクストルーダーはさすがに引退してE3Dヘッドに交代します。
このノズルももう4代目じゃないかな。
こないだ骨折が見つかって緊急手術が行われたフィラメント押さえ。E3Dヘッドではこの辺りが全て金属になりますのでもう壊れることも無くなります。
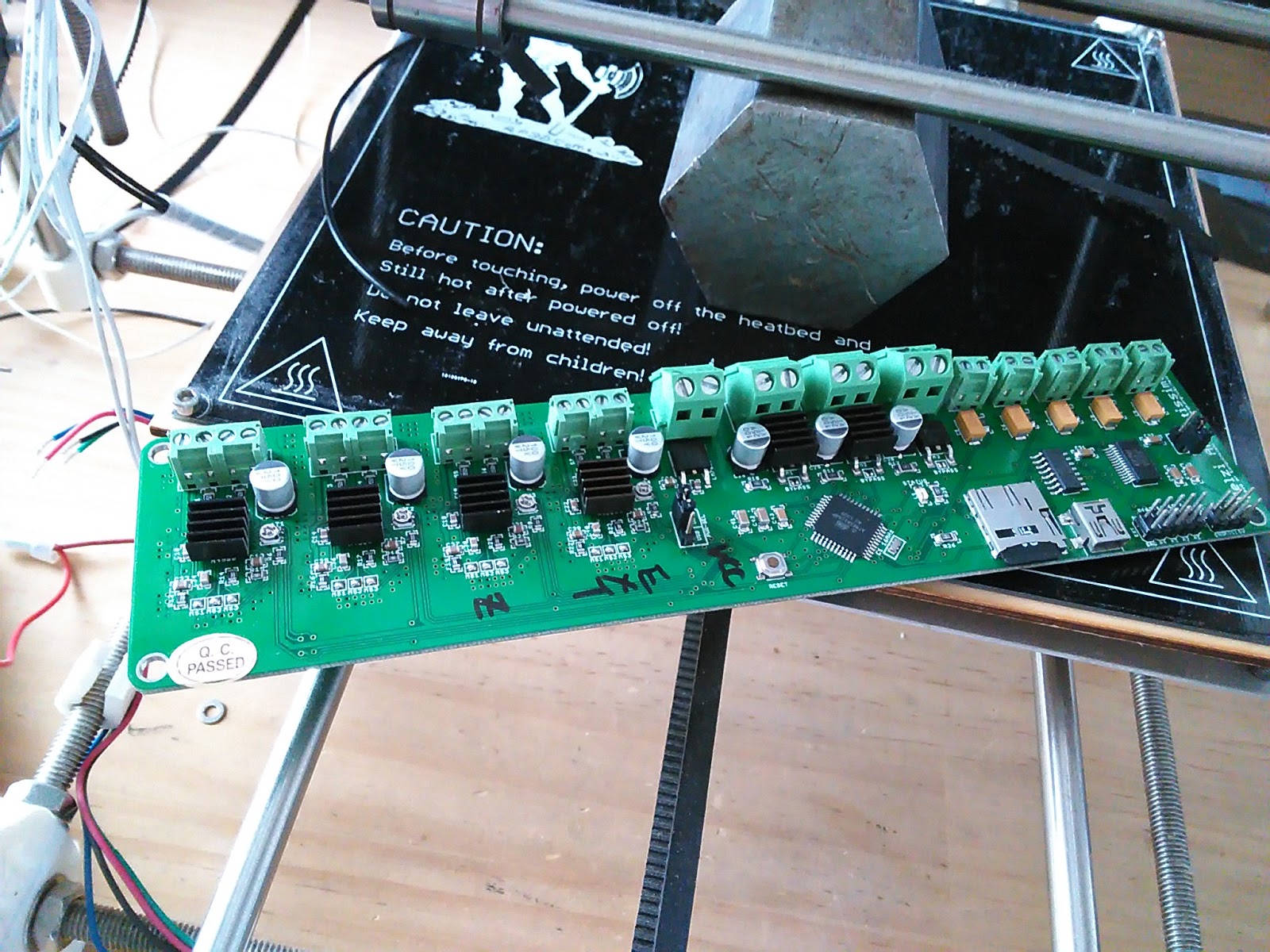
制御基板。心臓というか頭脳ですね。これは完全流用予定。
改めてみると随分と古い設計というか、荒っぽい作りだったことがわかります。これでそこそこの精度でものが作れてたんですから大したものです。
珍しく大物の工具の登場です。

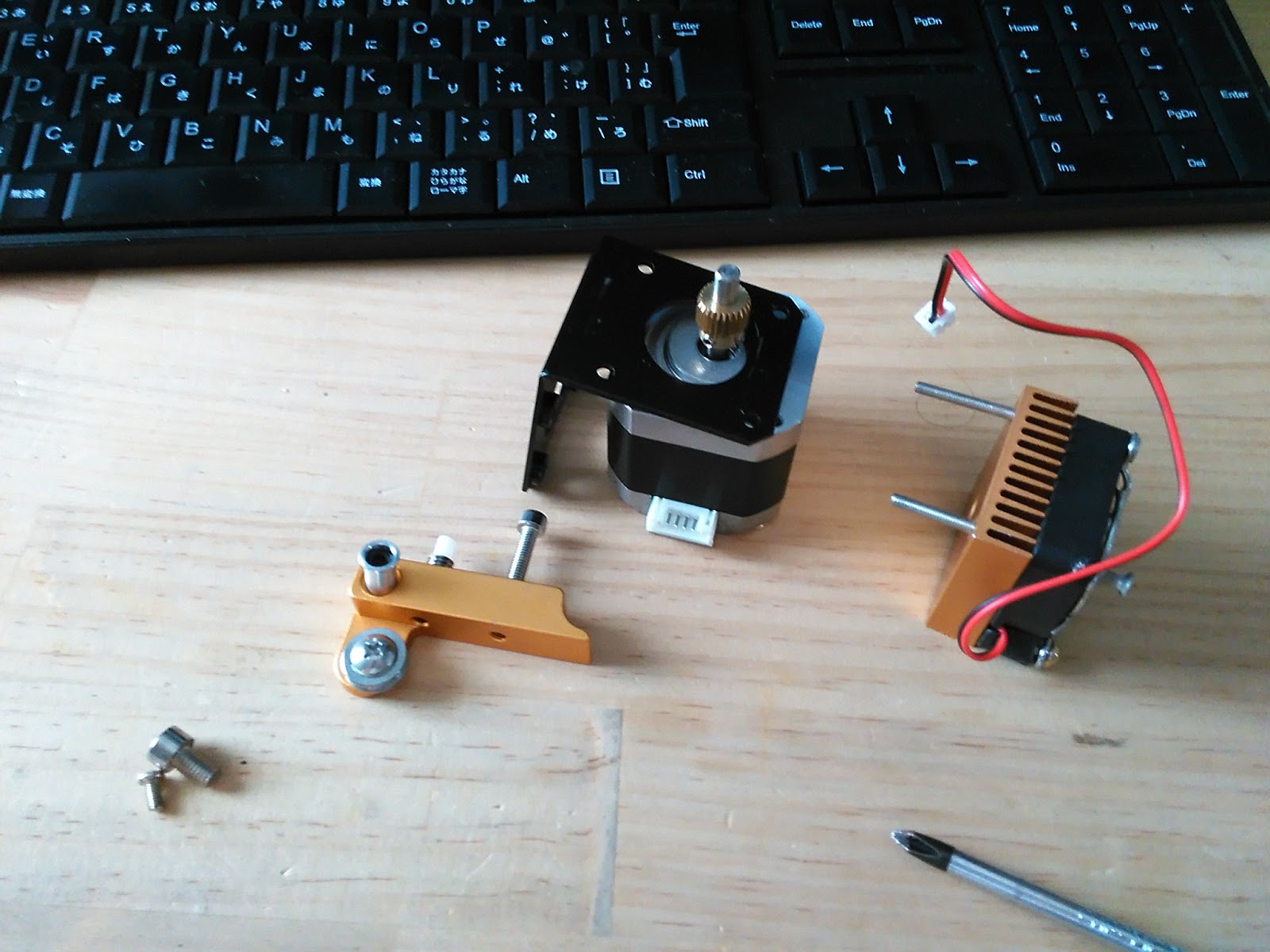
目的のZ軸モータから外します。今後は上下ひっくり返して使うことになります。
バックラッシュ防止機構部分。
片方外れました。
両方とも外れました。
支えを失ってX軸が落ちてきますので、ノズルに力がかからないように馬を噛ませて支えます。
ヘッド外して、
ハーネスごと基板と切り離します。
リミットスイッチ外して、
基板をおろします。
だいぶ簡単な体になってきました。
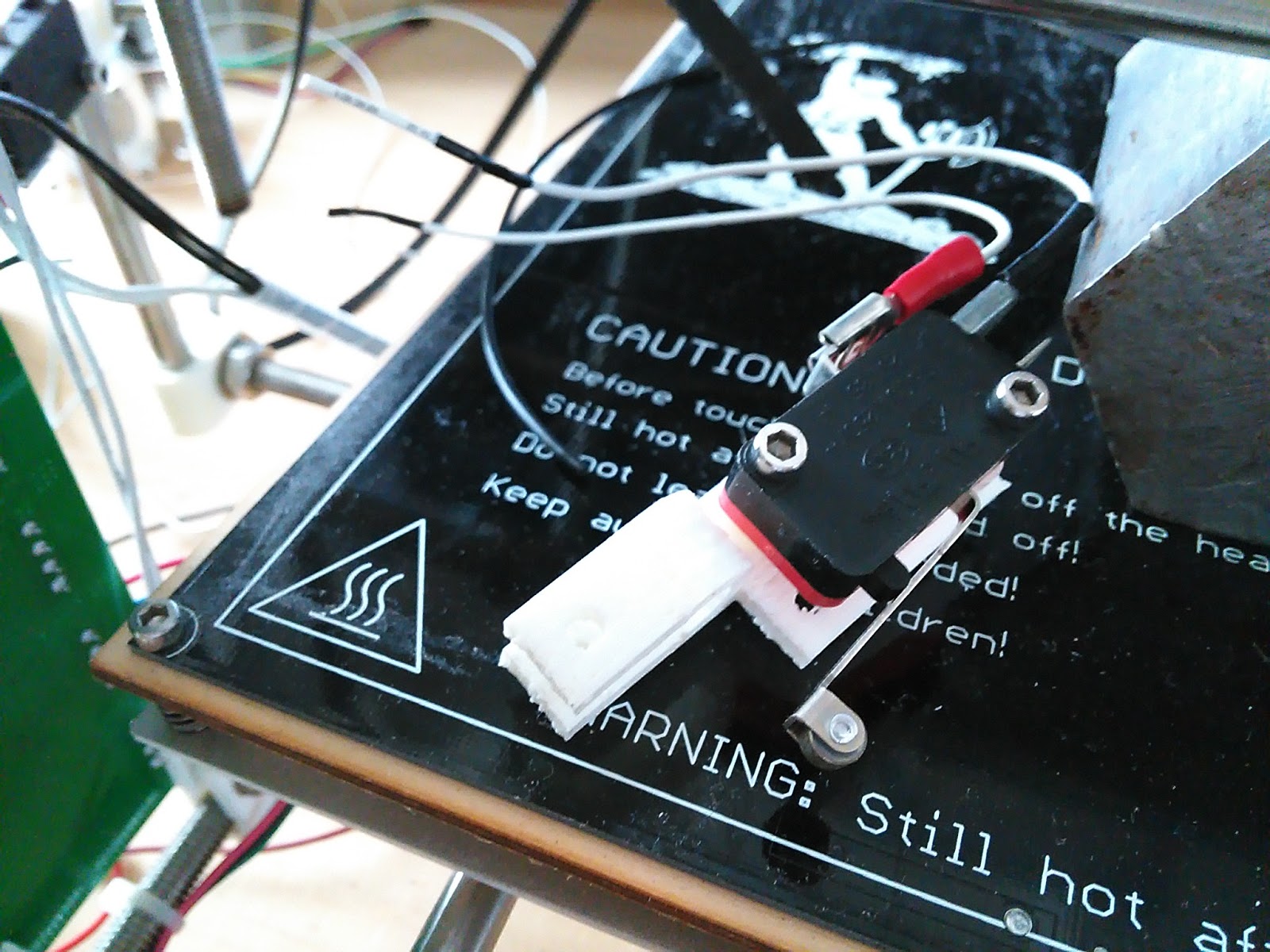
それにしても、リミットスイッチは全部このようなPLAのパーツで固定されています。ちょっと押すとすぐ動く(笑
いやよくこれでプリント出来ていたなあと思います。

M8送りねじとばねとナット。これももちろん流用です。

Z軸のスライダー。シャフトとリニアブッシュです。作るときにギコギコしていて不安でしたが、ちゃんと動いてました。外して改めて確認してみますが、やはりギコギコです。

X軸を外しました。
X軸のモータと反対側にあるプーリー。このパーツがどうしてもキットに入っていた物ではうまくいかず、結局ホームセンターでねじとワッシャ買って作ったように記憶しています。
120°ひっくり返して、
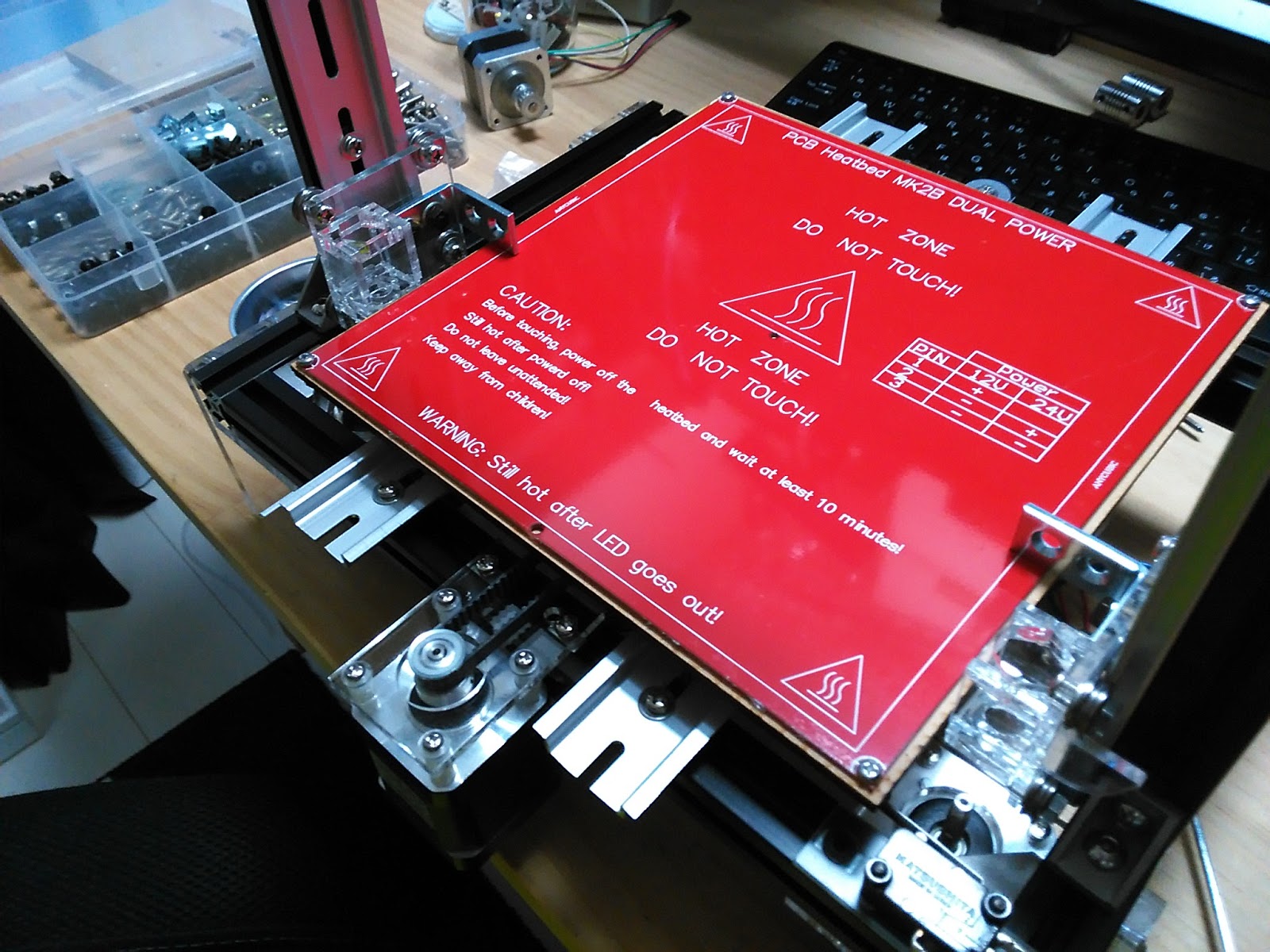
ヒートベッド外します。
取り外したパーツ類。様子を見ながら考えますが、ヒーターも流用するかもしれません。
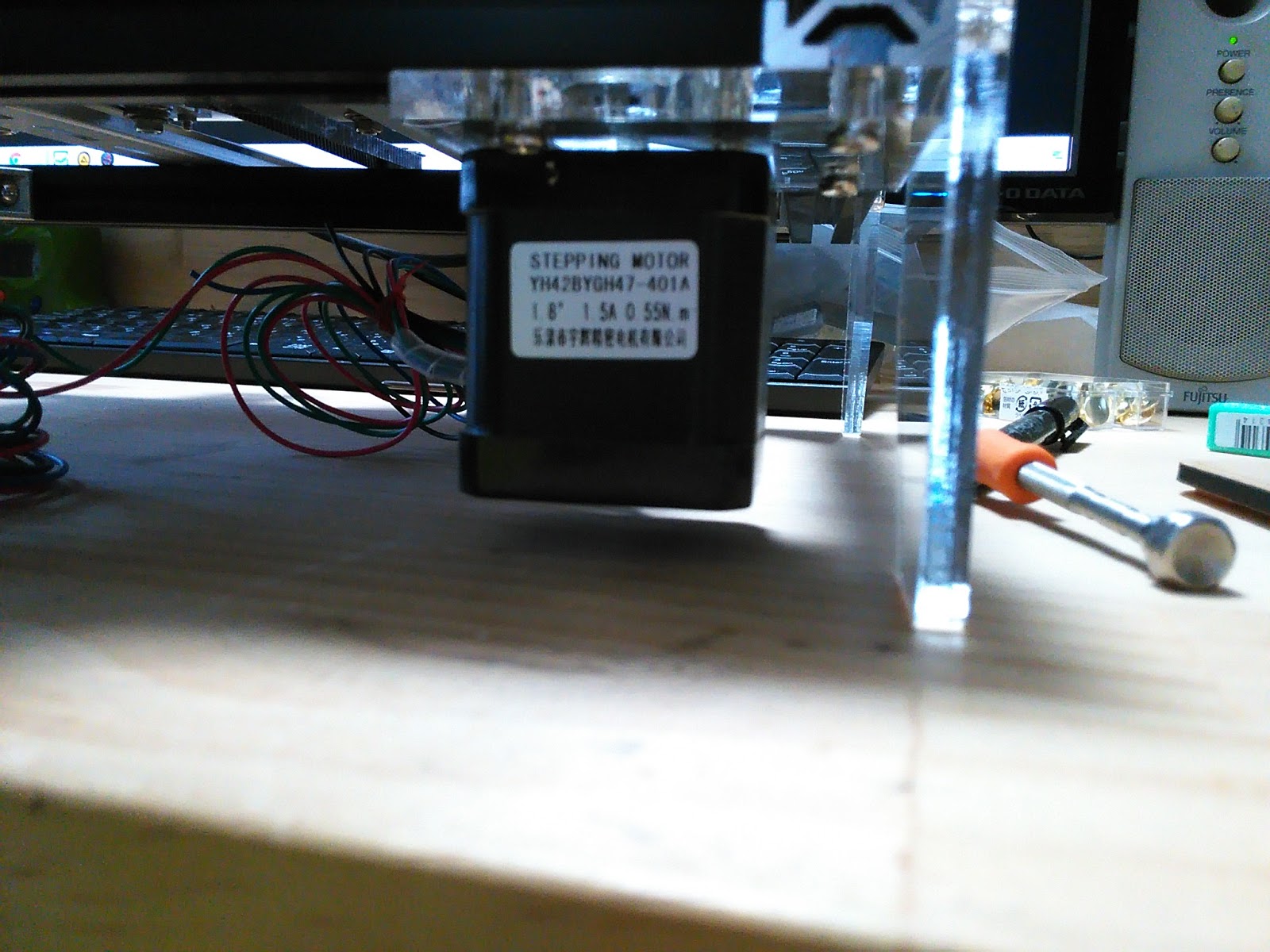
X軸Y軸それぞれ1、Z軸に1個のステッピングモータ。このほかにエクストルーダーにモータがついていますが、E3Dヘッドには新しいモータがついておりますのでとりあえずこの4つを流用することにします。
骨だけになった旧3Dプリンタさん。お疲れさまでした。いままでありがとうございました。

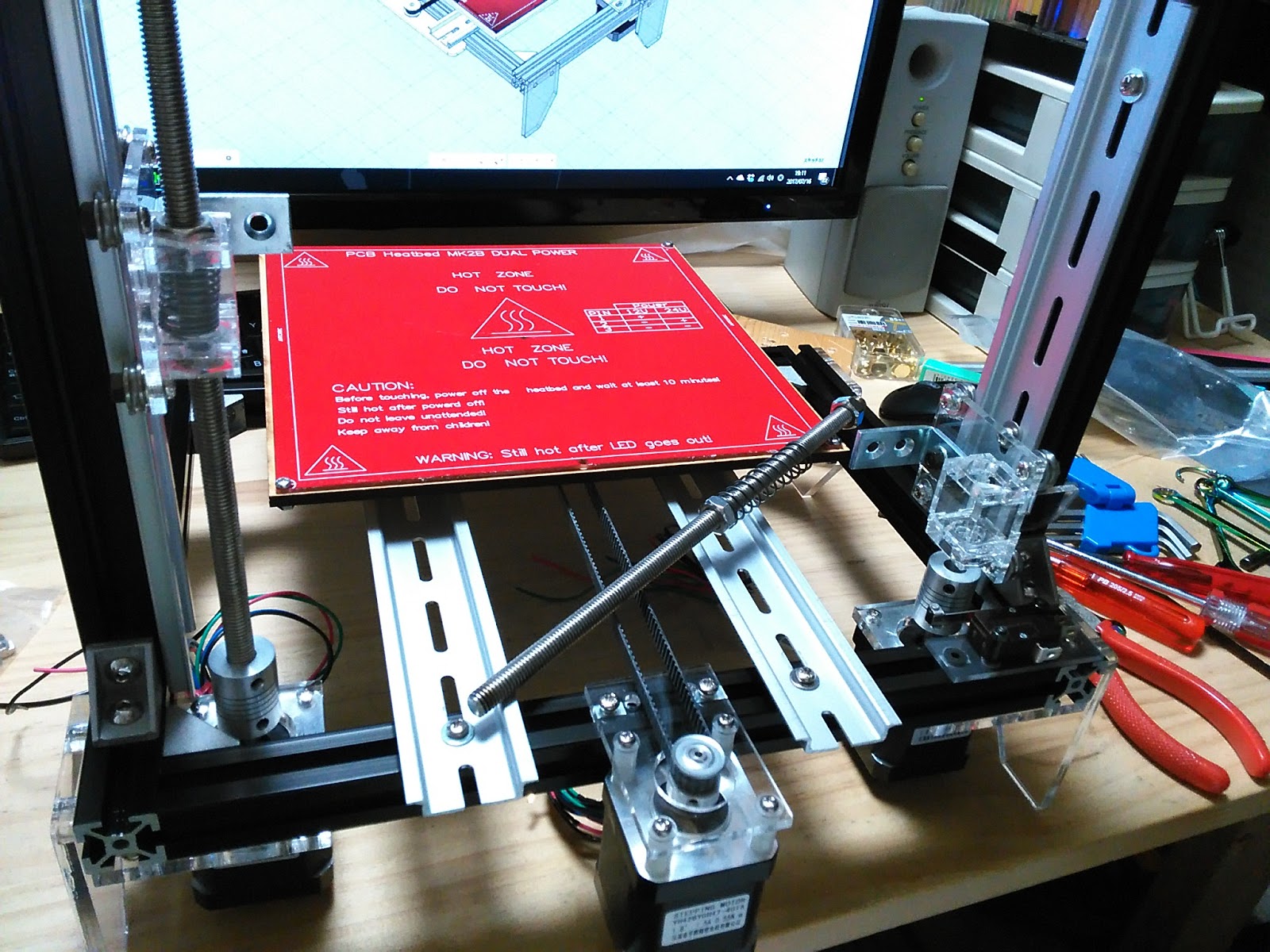
では、必要な臓器が手に入りましたので直ちに移植手術に入ります。
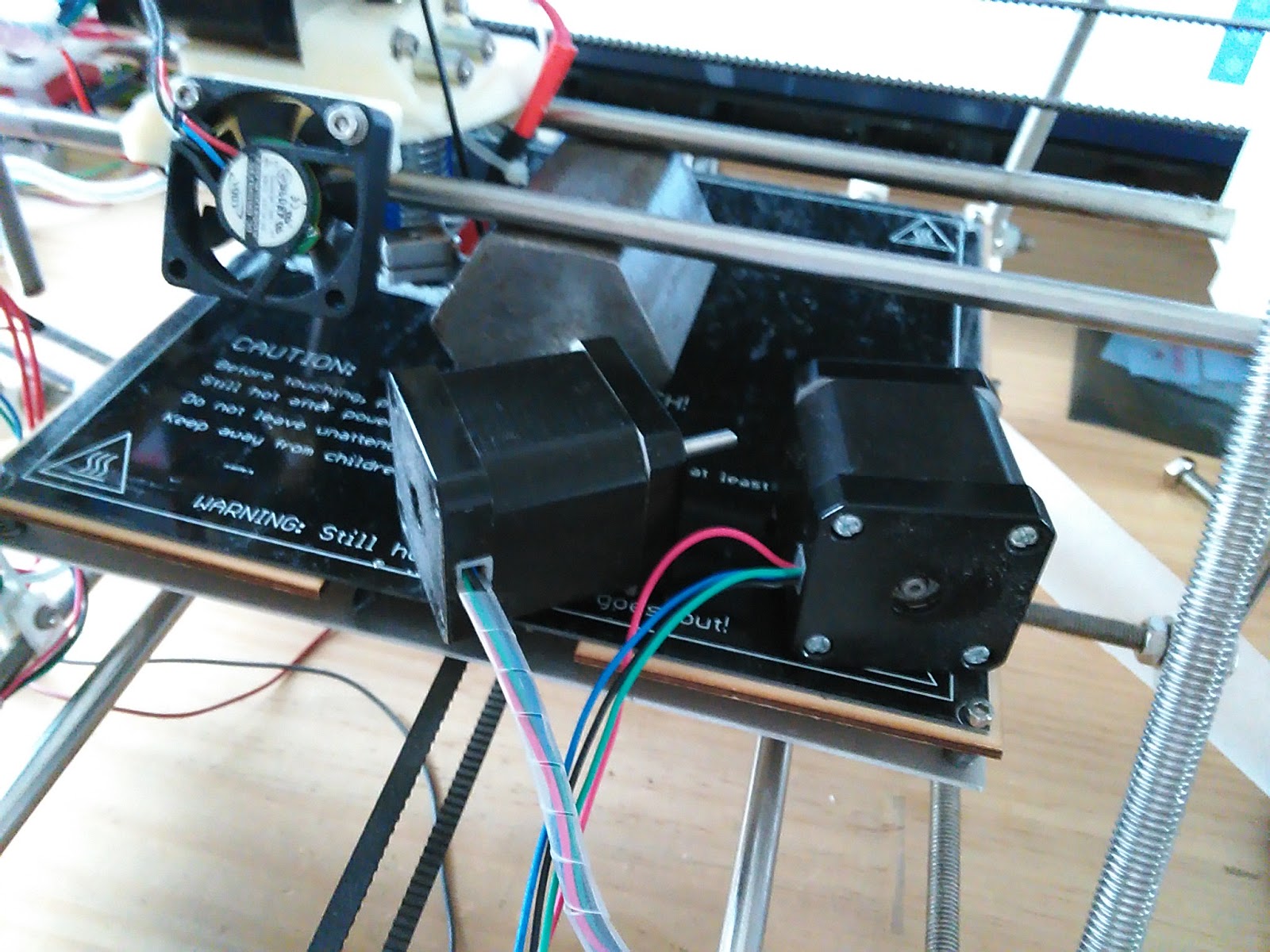
Z軸用の2つのモータをねじ止めして、
ベースフレームに、
固定します。
あらら、ここまで頑張ったのに結局モータのお尻があたりました(笑
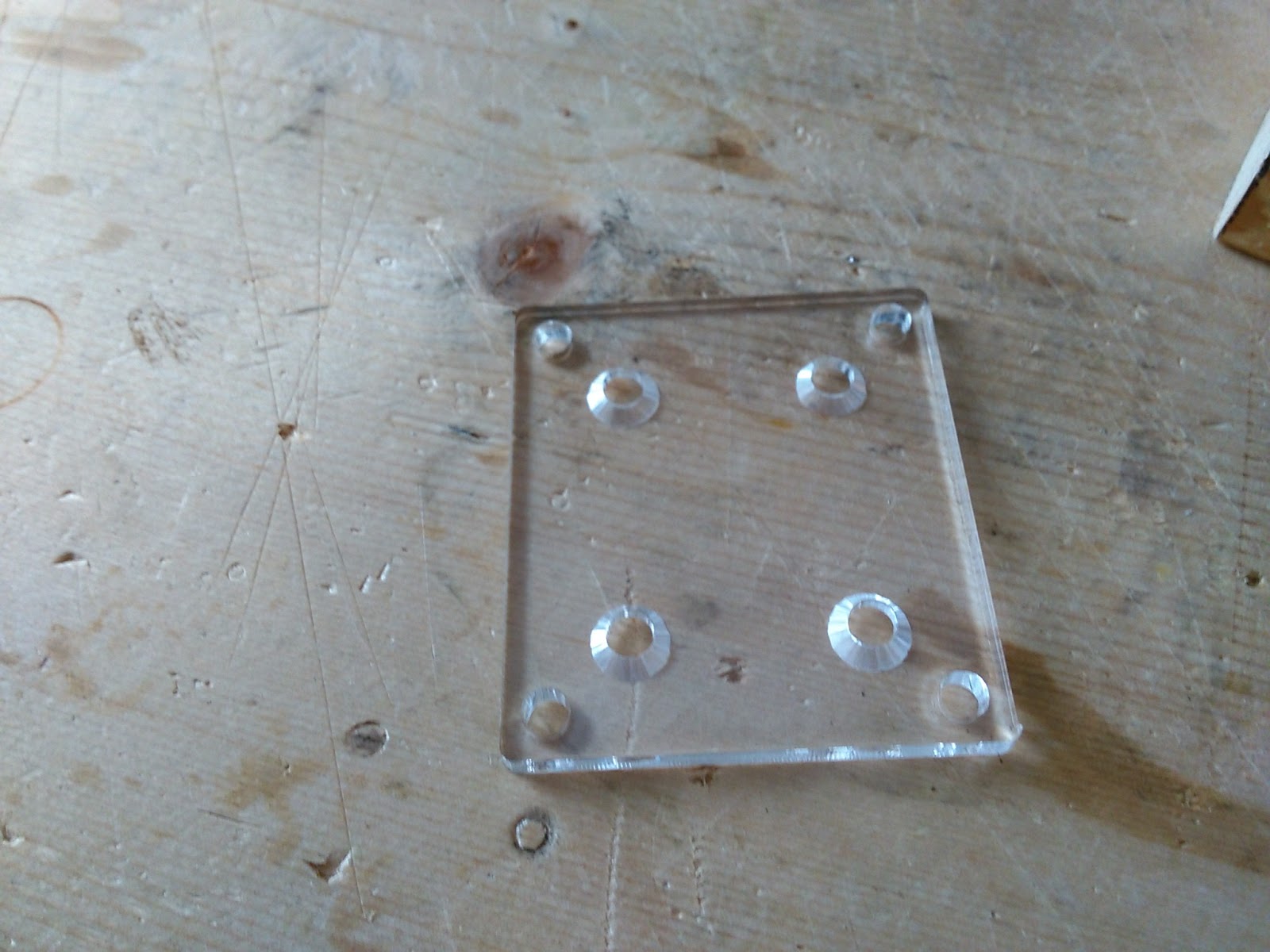
アクリル板の足は作り直しですね。

とりあえずできるところまで進めます。
ヒータの配線を引き出すための穴を、
MDFのベースに開けます。どうせバカ穴なので大体の目測で、
まあいいでしょ。この部分はいずれ作り直しになるような気がしています。
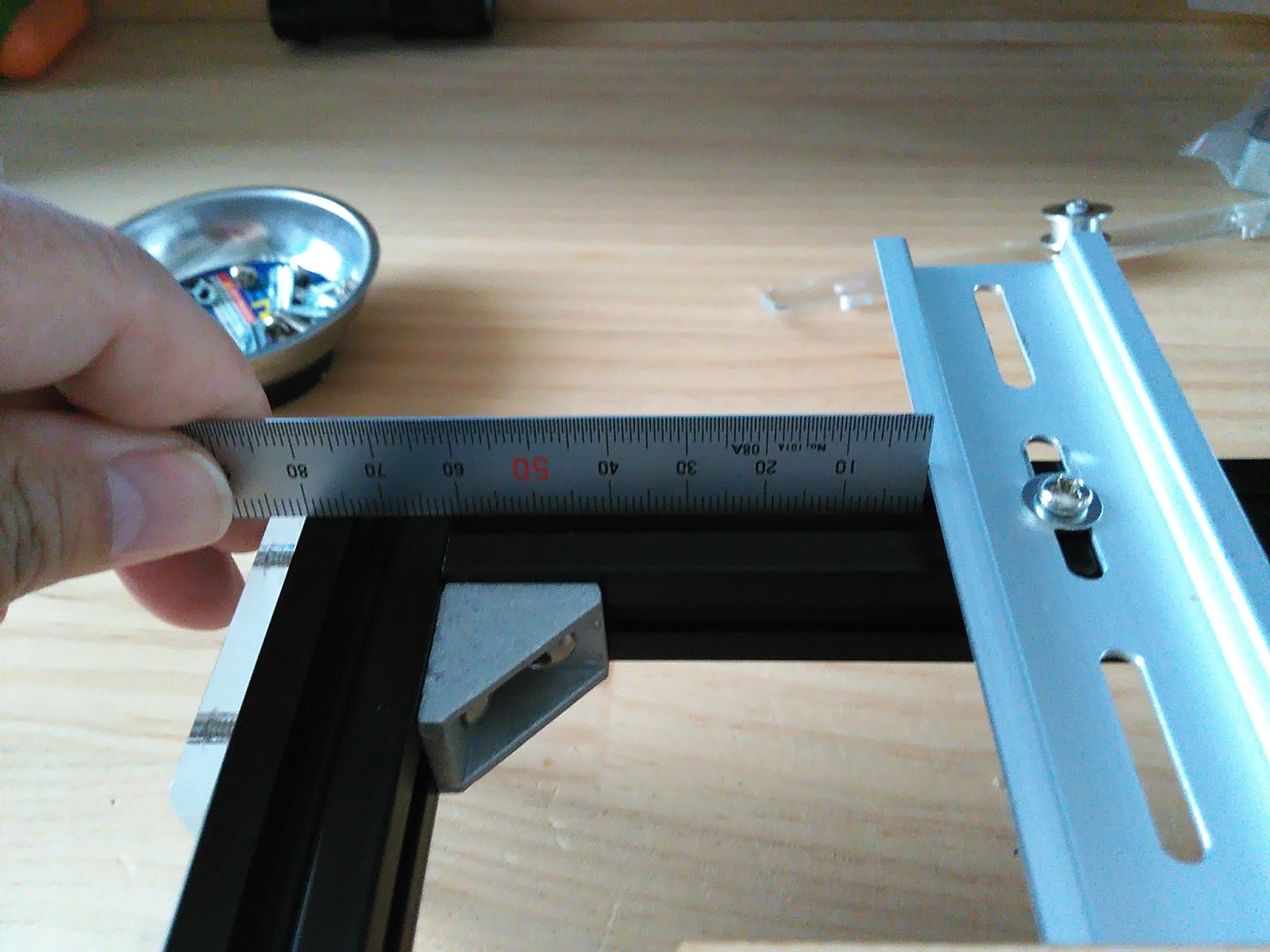
改めてY軸の調整です。一方のレールをフレーム基準で平行出しします。
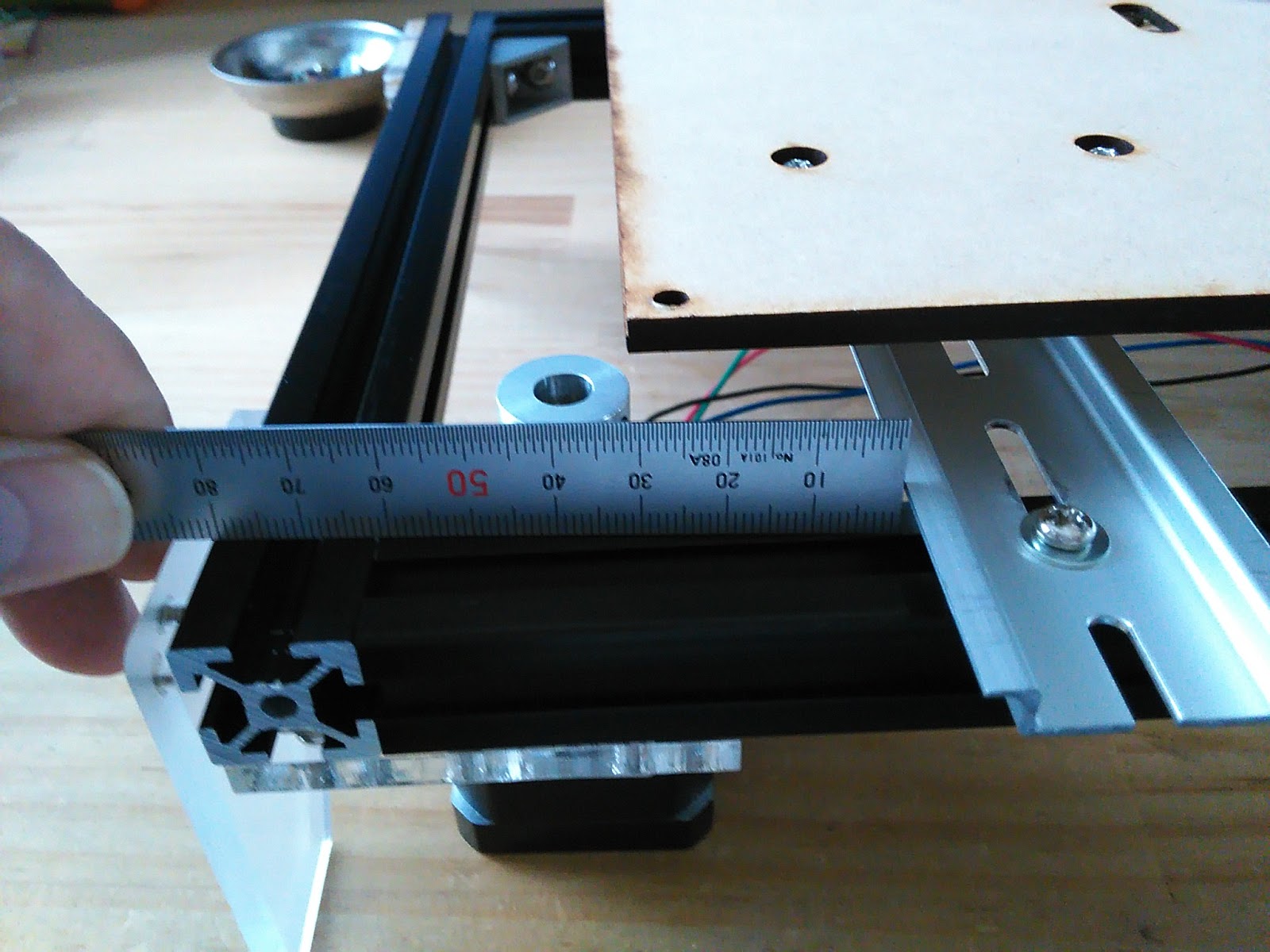
前後の端で距離を合わせて仮固定します。
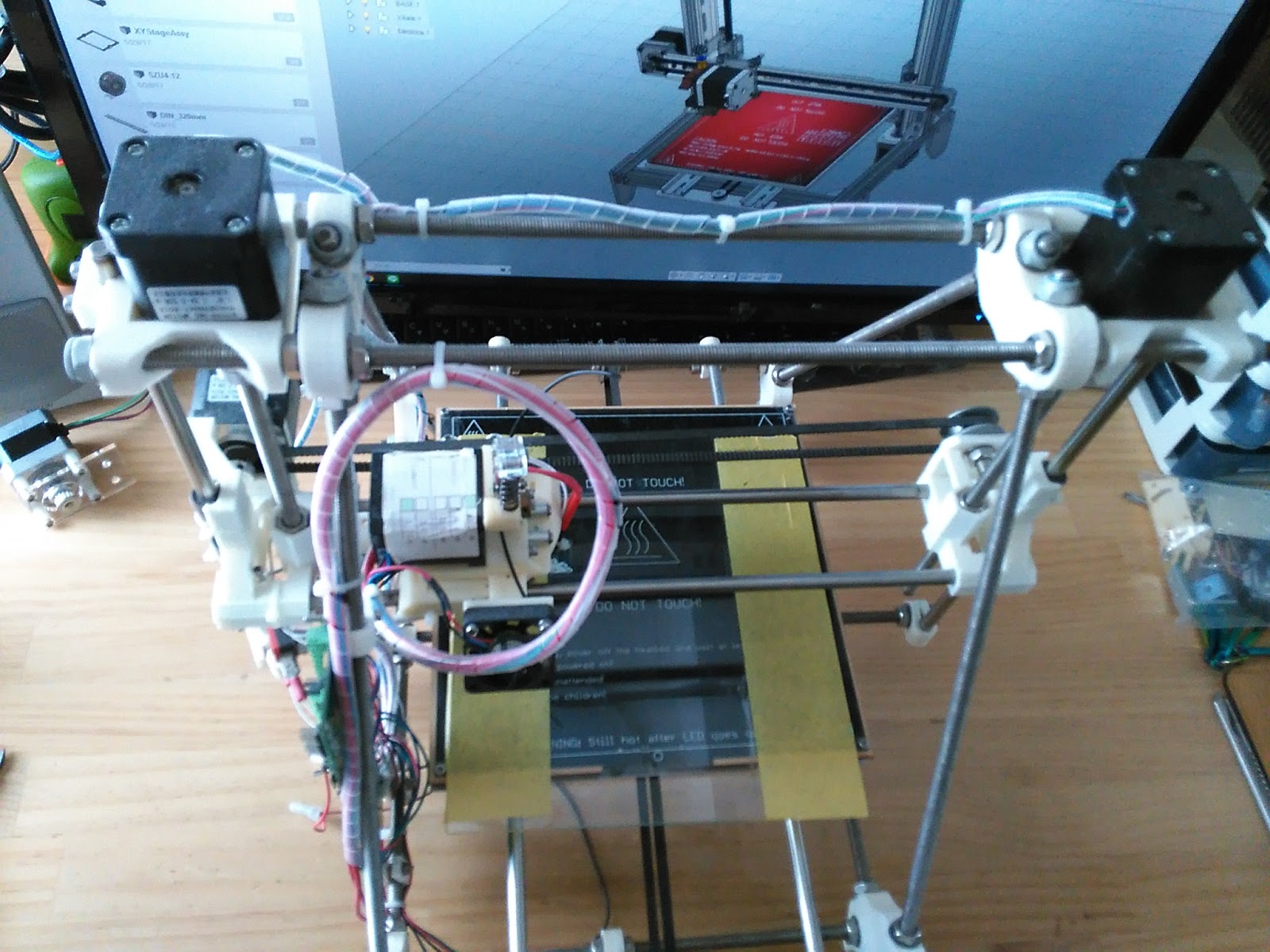
Z軸のモータは左右が同期して動かないとX軸が斜めになってしまいますので、一台のドライバで一緒に回します。そのために片方のモータを抜けた電流がもう一方のモータに流れるような配線になっています。
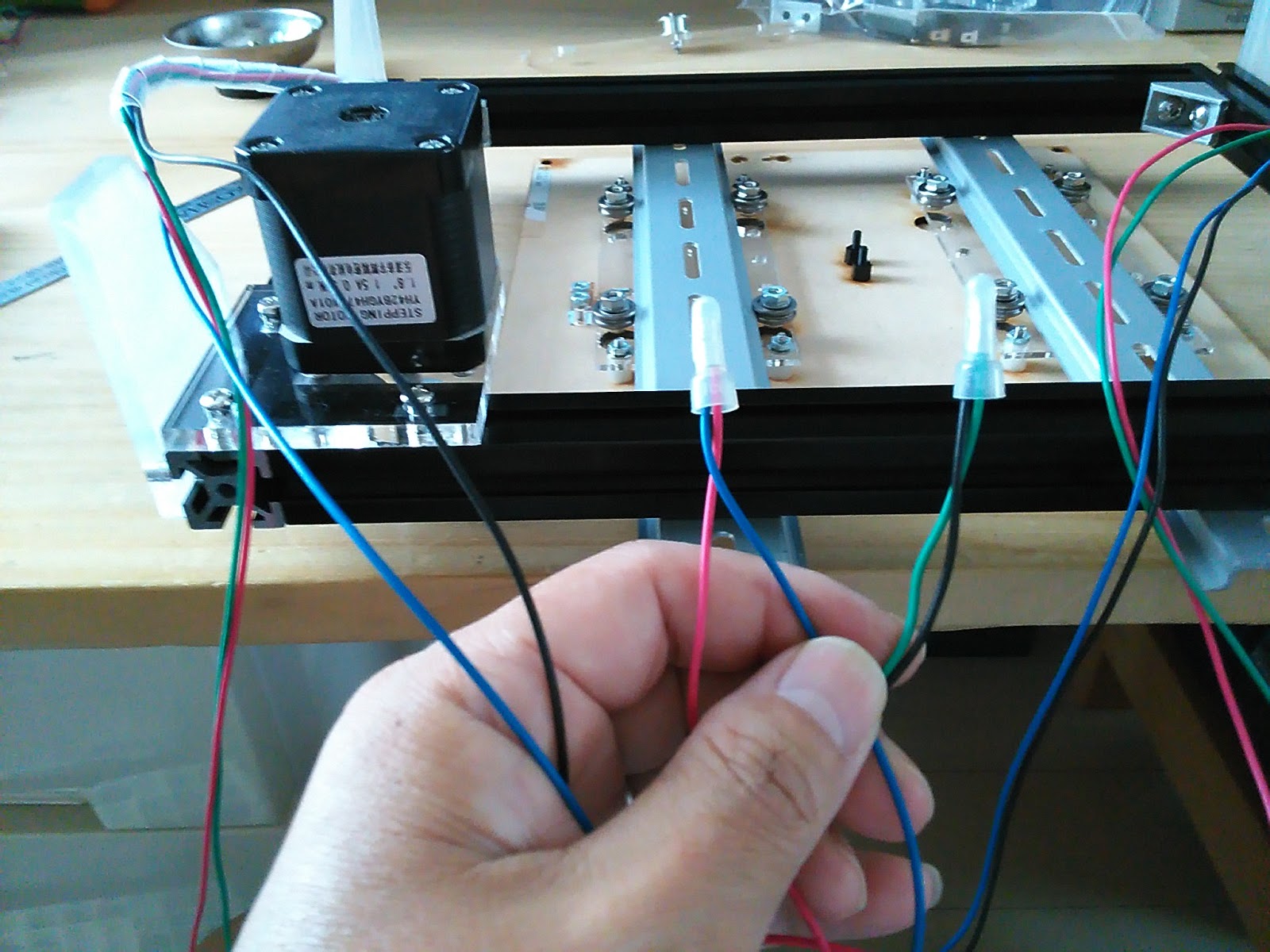
いまは散らかりますので、一旦切断して巻き取っておきます。
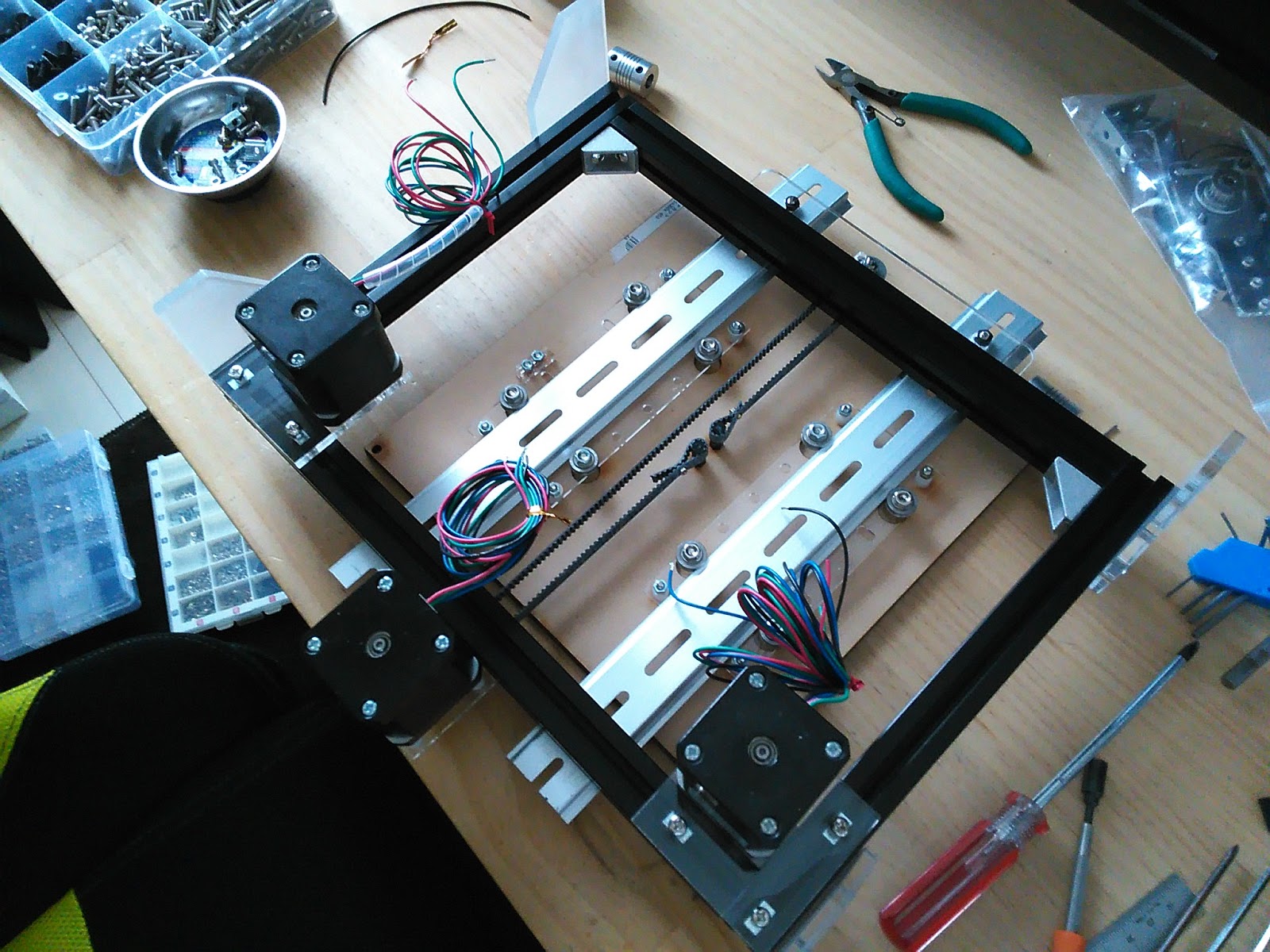
Y軸を動かしながらレールの調整をしておきます。

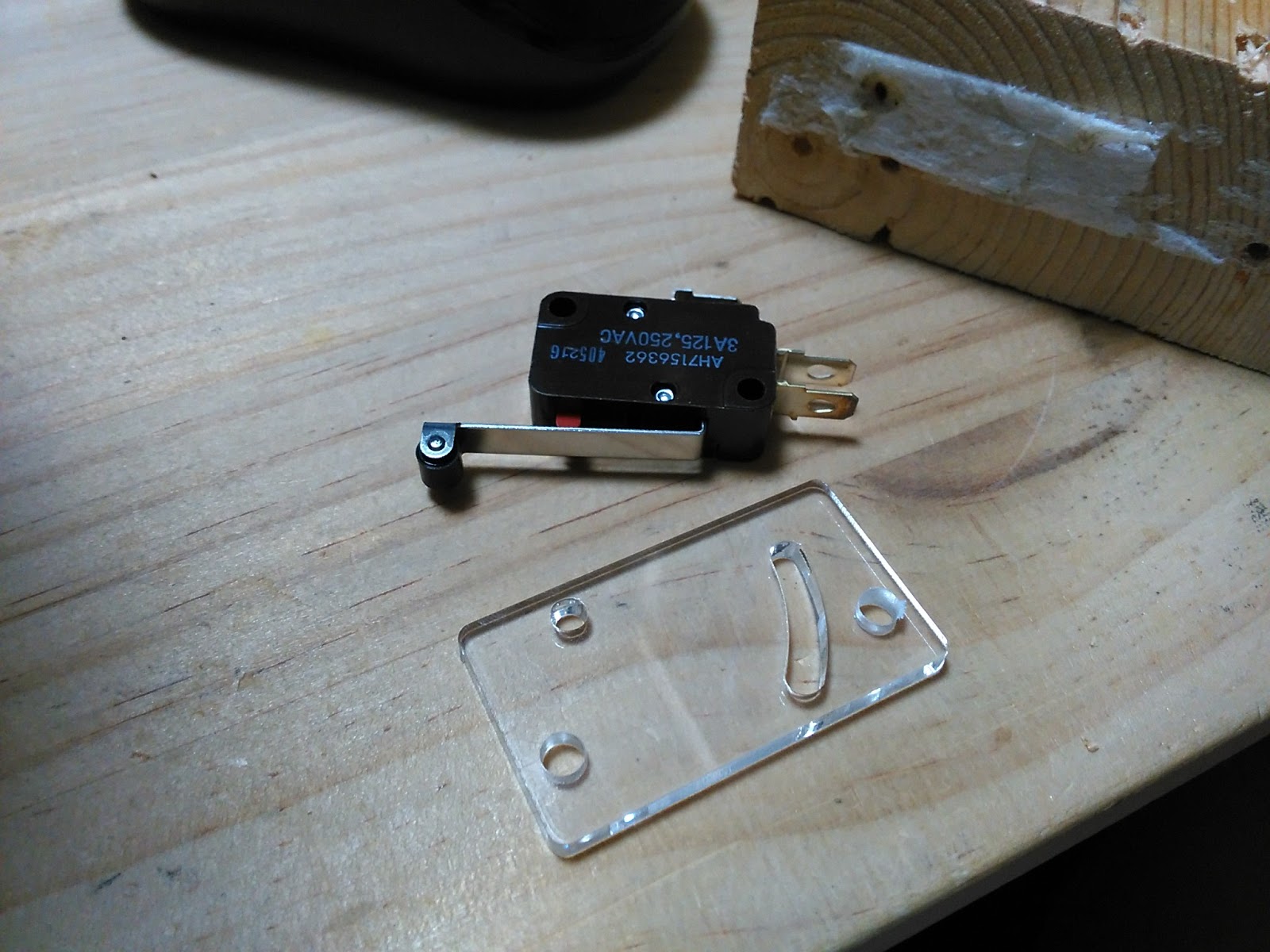
お次、Y軸のリミットスイッチ取り付けです。これもパーツをすでに作っております。
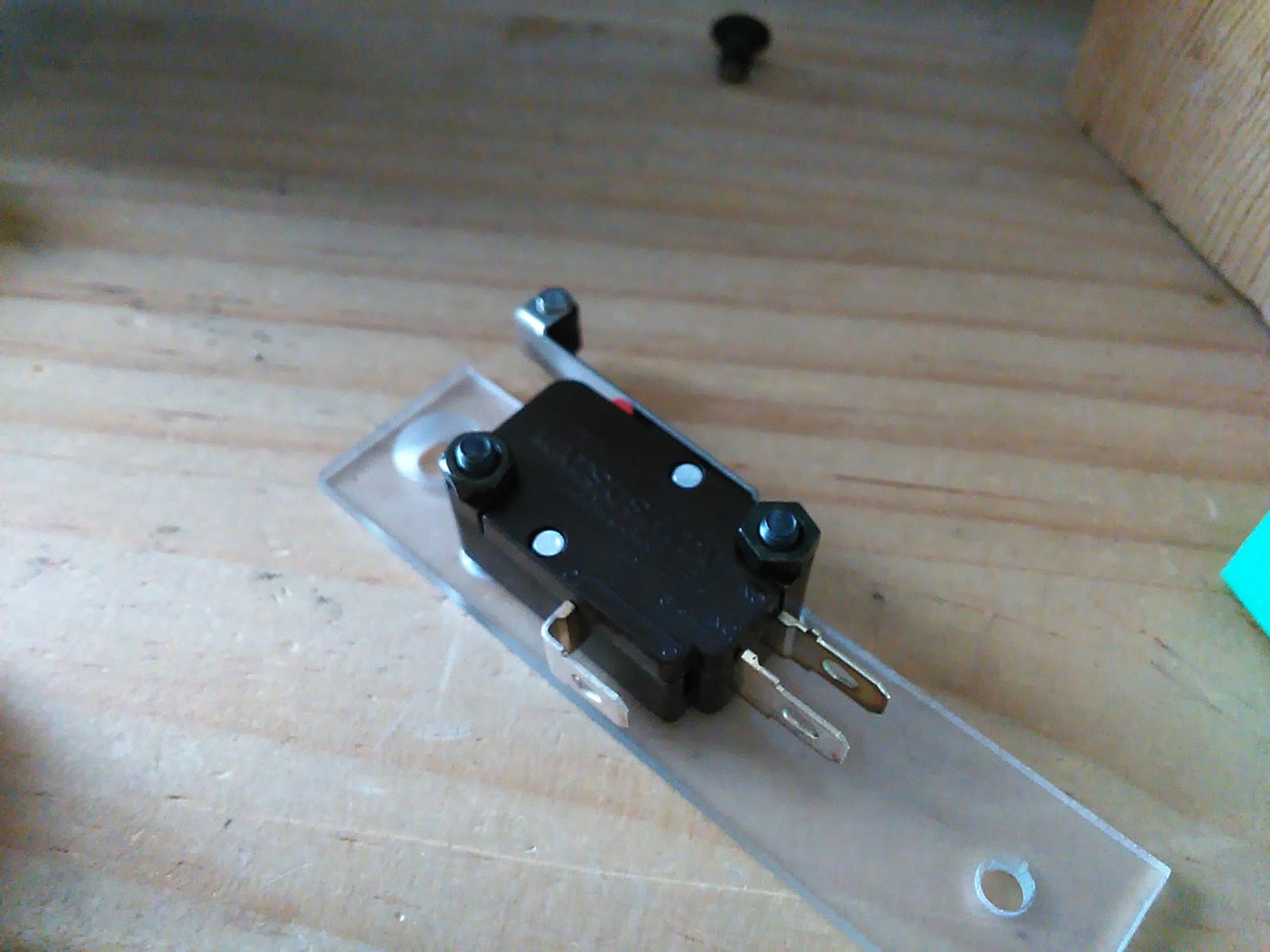
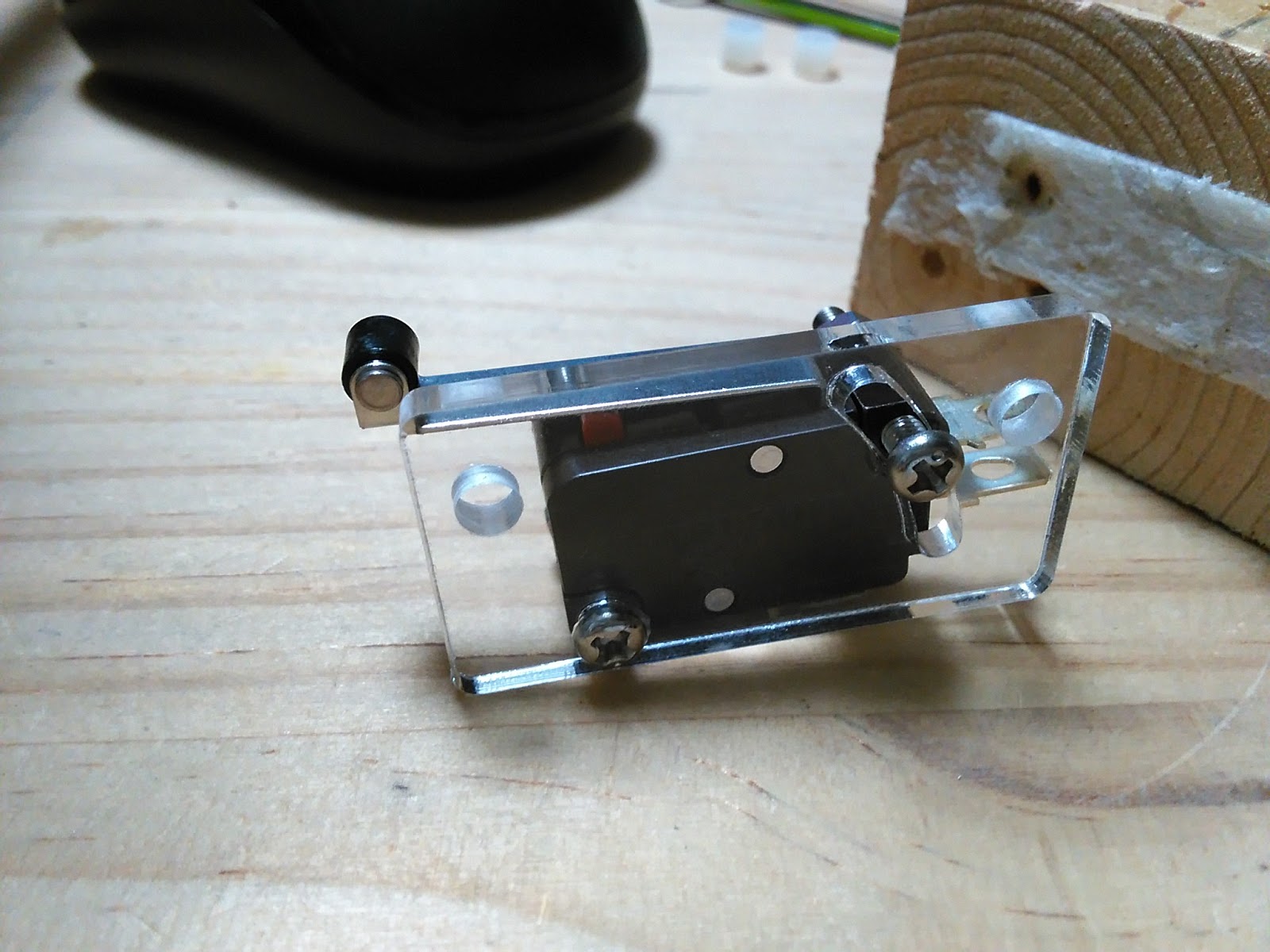
こんな感じにリミットスイッチを取り付けて、
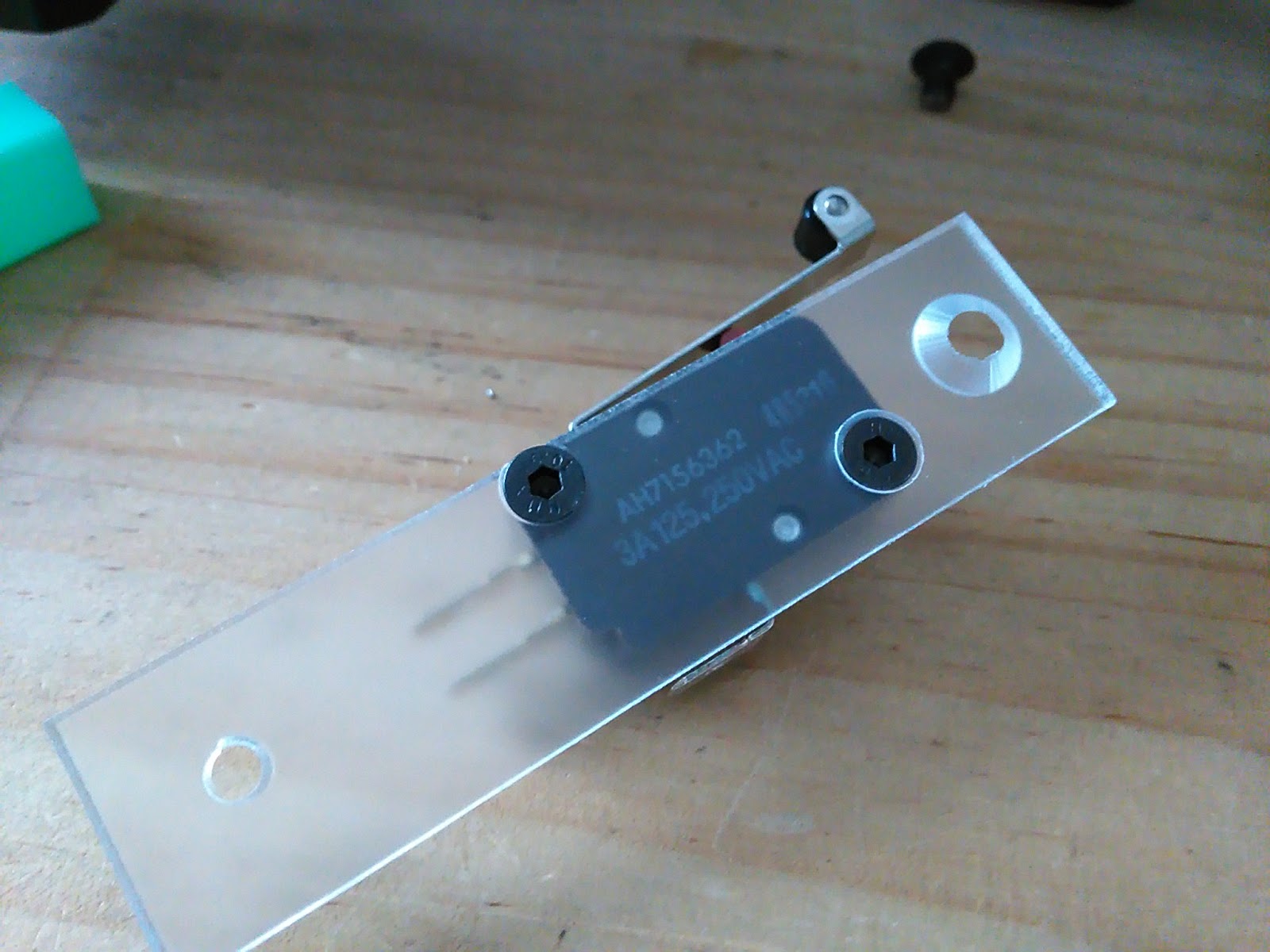
図面だとこの位置に取り付けることになります。仮止めしておきます。
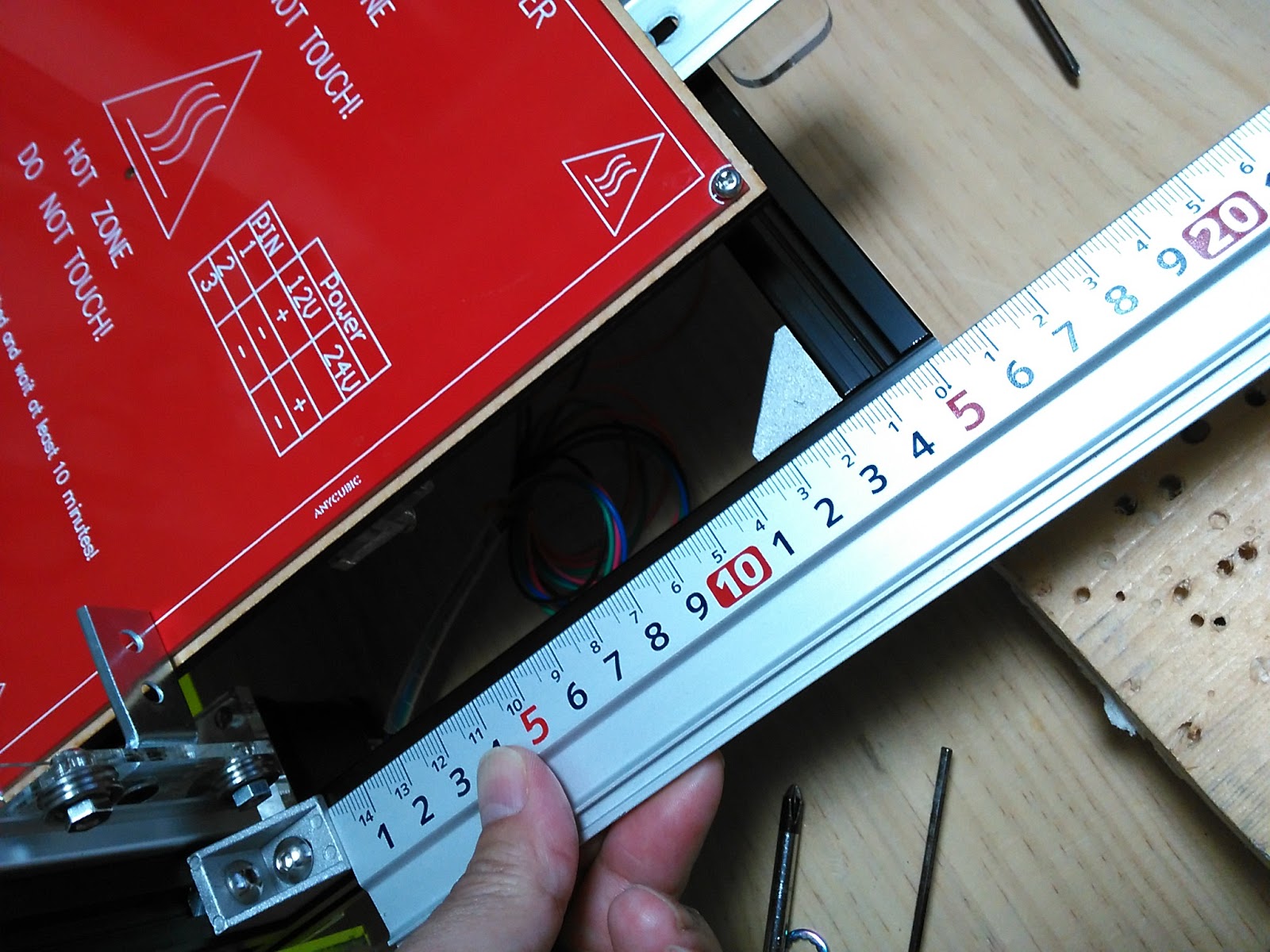
ここでようやくアクリル板を切り出して足を交換します。10mm長くしました。
旧足はサンドペーパーで一面を粗してすりガラス感を出したのですが、面倒なのでクリアのまま行きます。せっかく作ったのに(笑
廃棄(泣
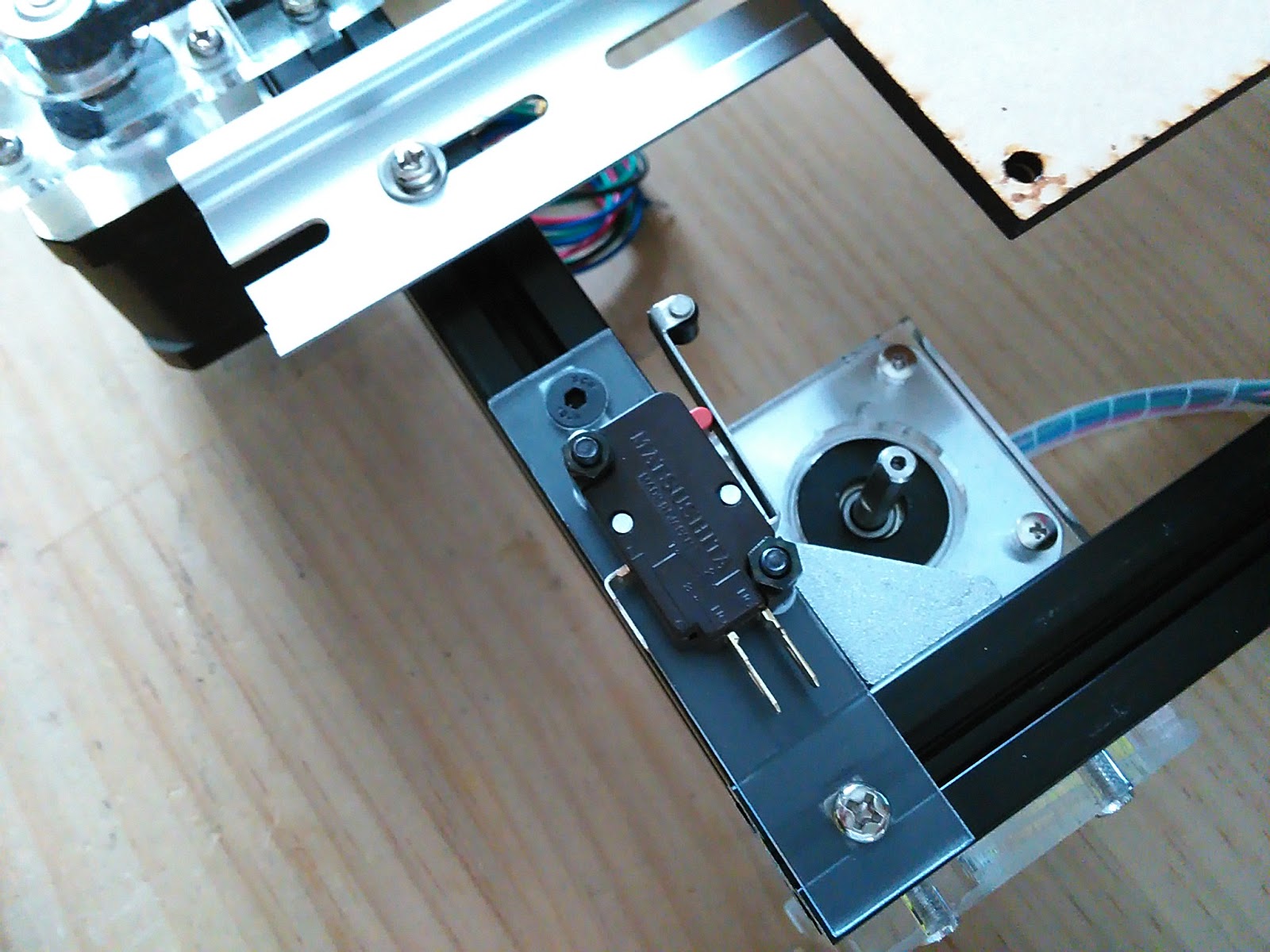
Y軸のリミットスイッチがY軸スライダのねじと一部干渉することが発覚しましたので、プッシャの位置をオフセットしました。
ちょっと見栄えが悪いですが機能上は問題ありません。スイッチが押されたとこ。
干渉はfusio360の図面に長さを合わせたネジまで描いておけば事前にわかるんですけどね。ええ、面倒なんです。
ということで、小加工を追加してY軸リミットスイッチは完了。
ちゃんとモータの尻もちは改善されております。
さてさて、えらく遠回りしましたが、Z軸に戻ります。
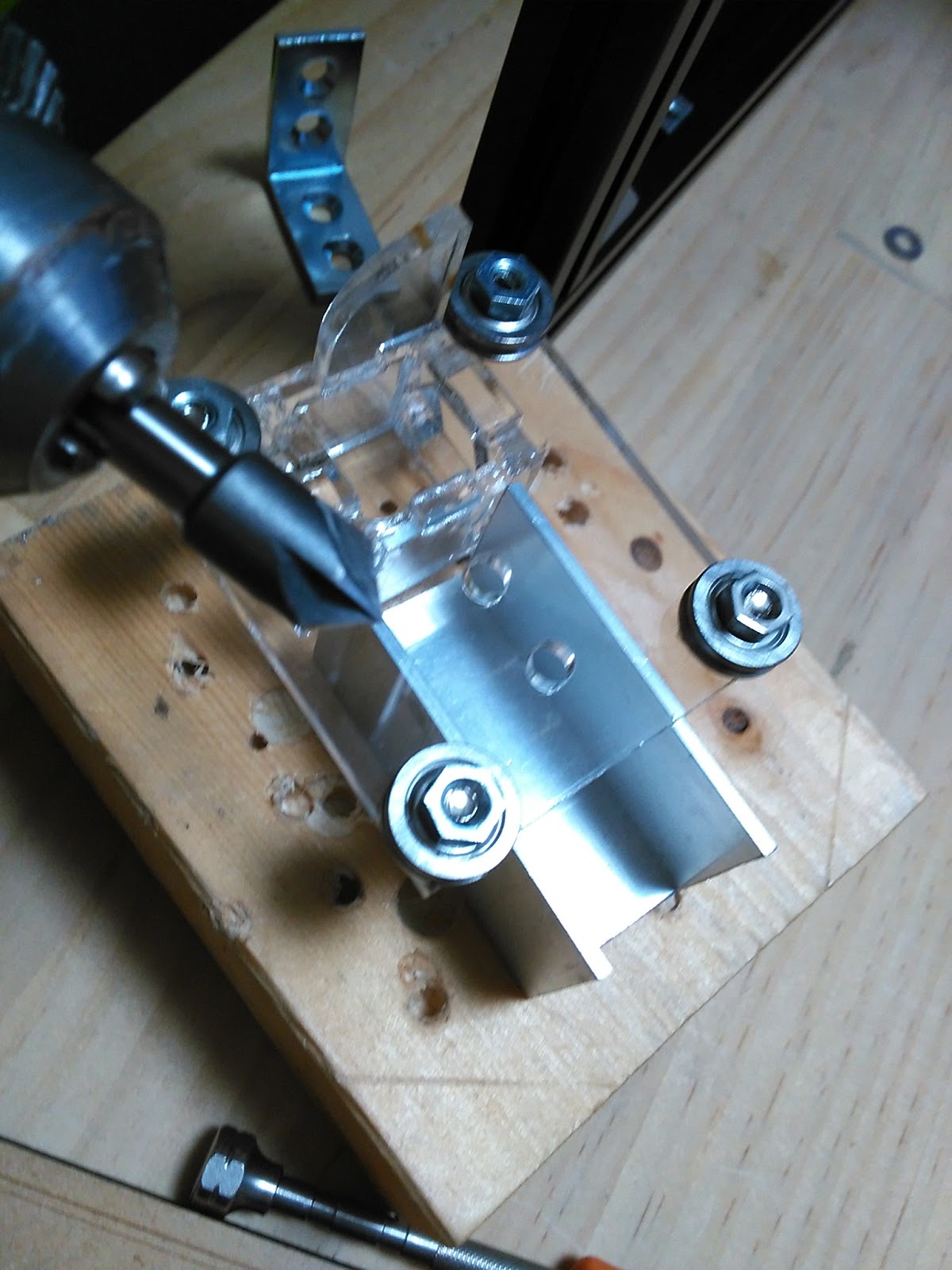
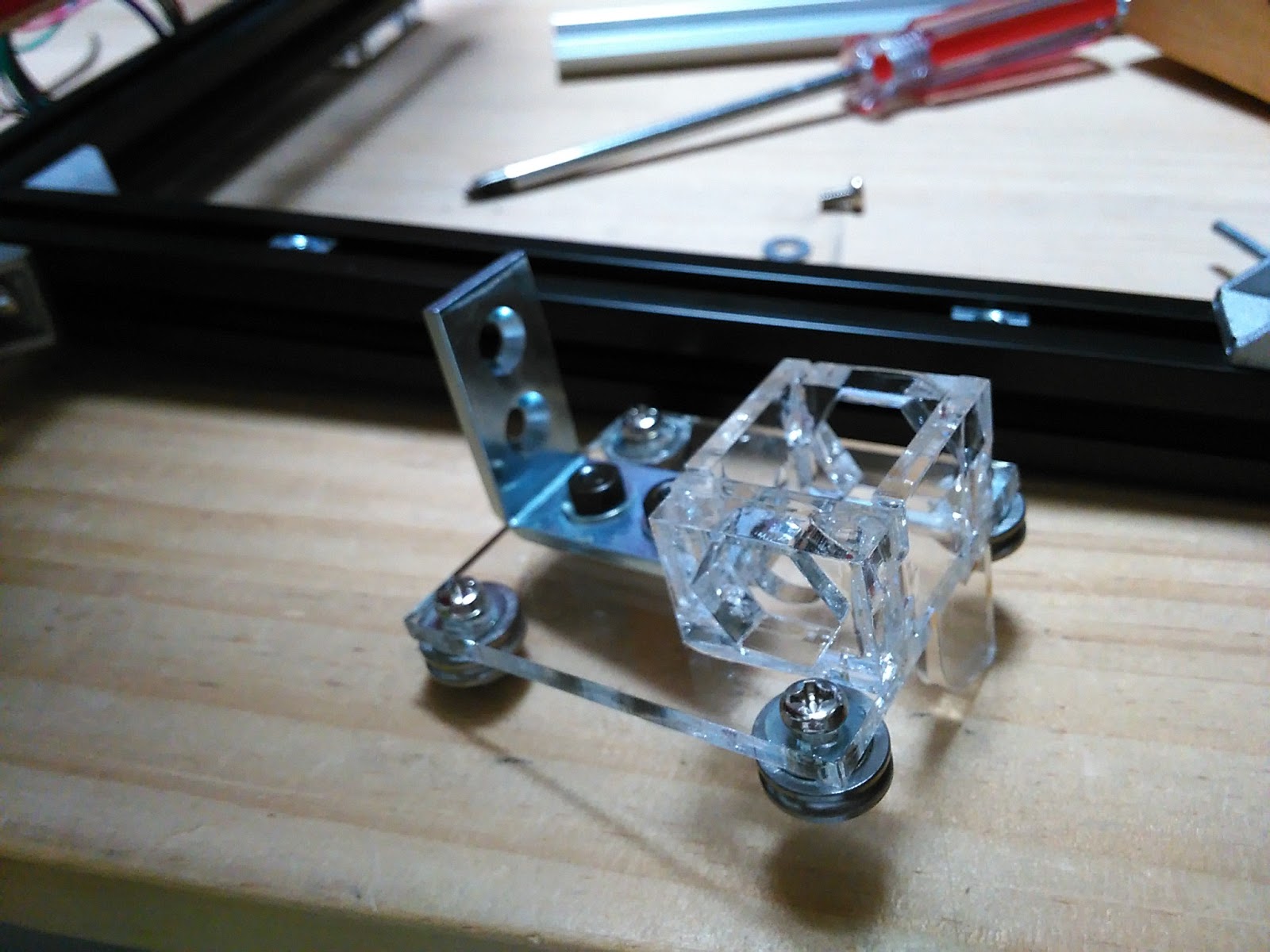
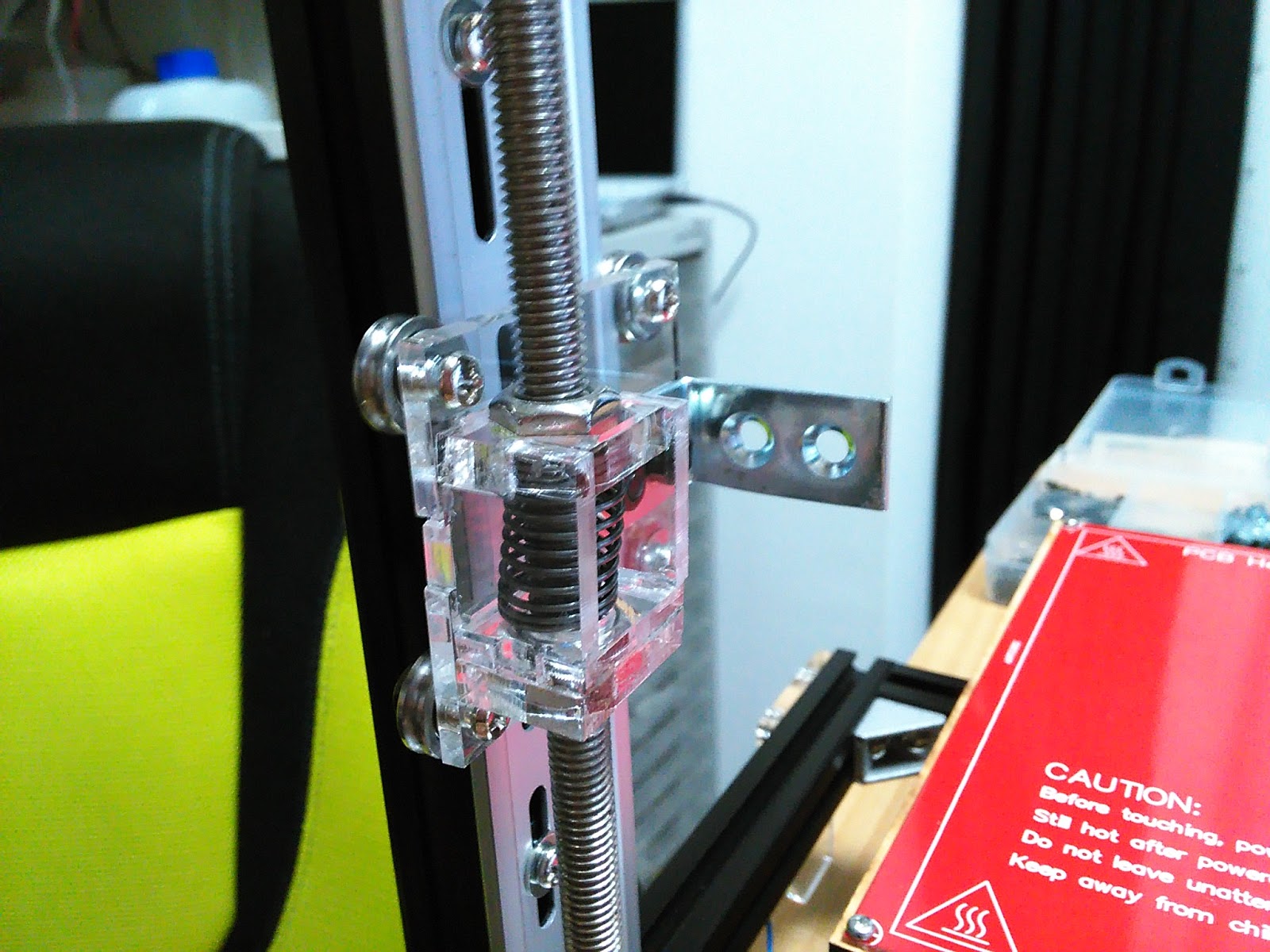
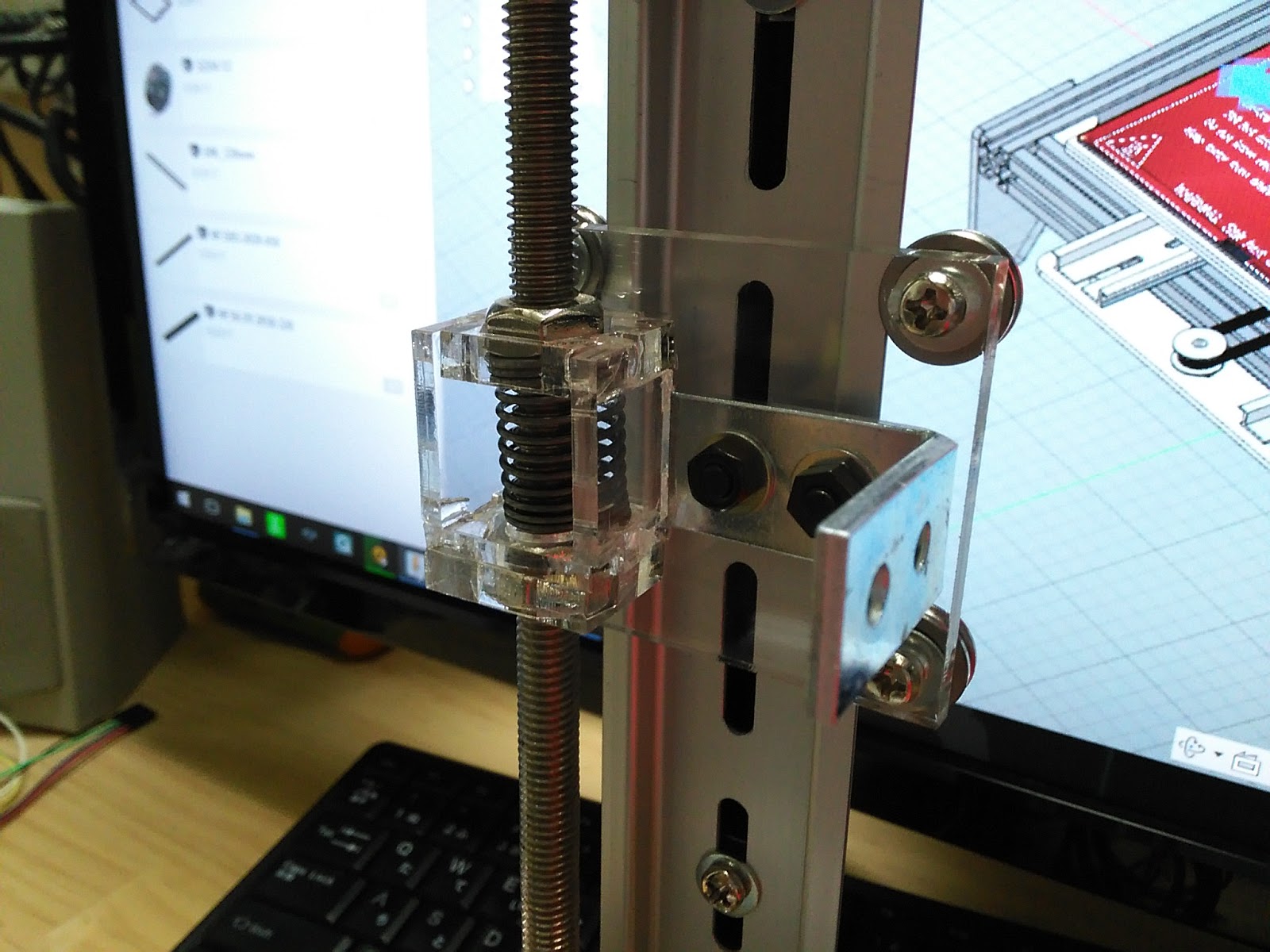
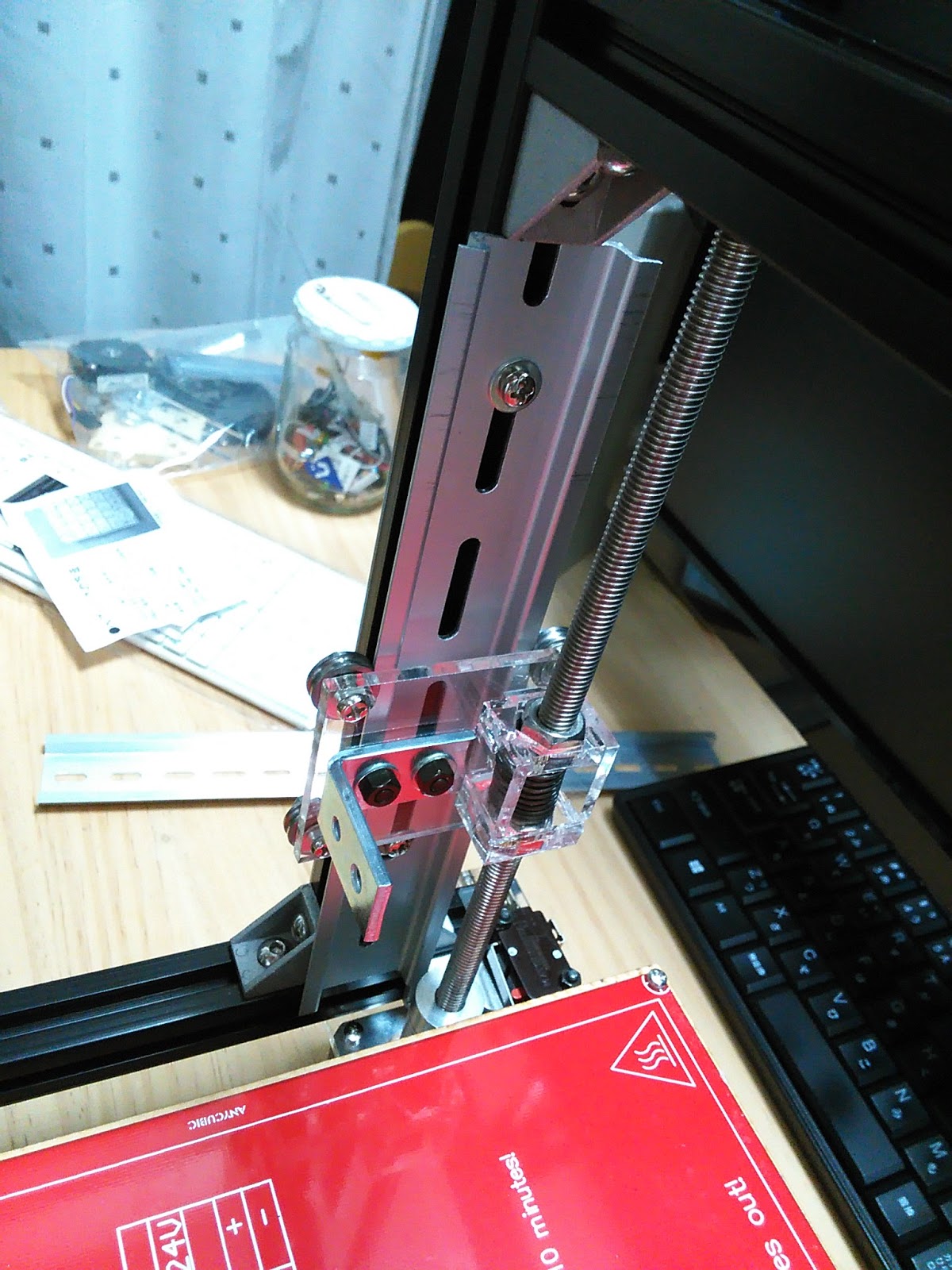
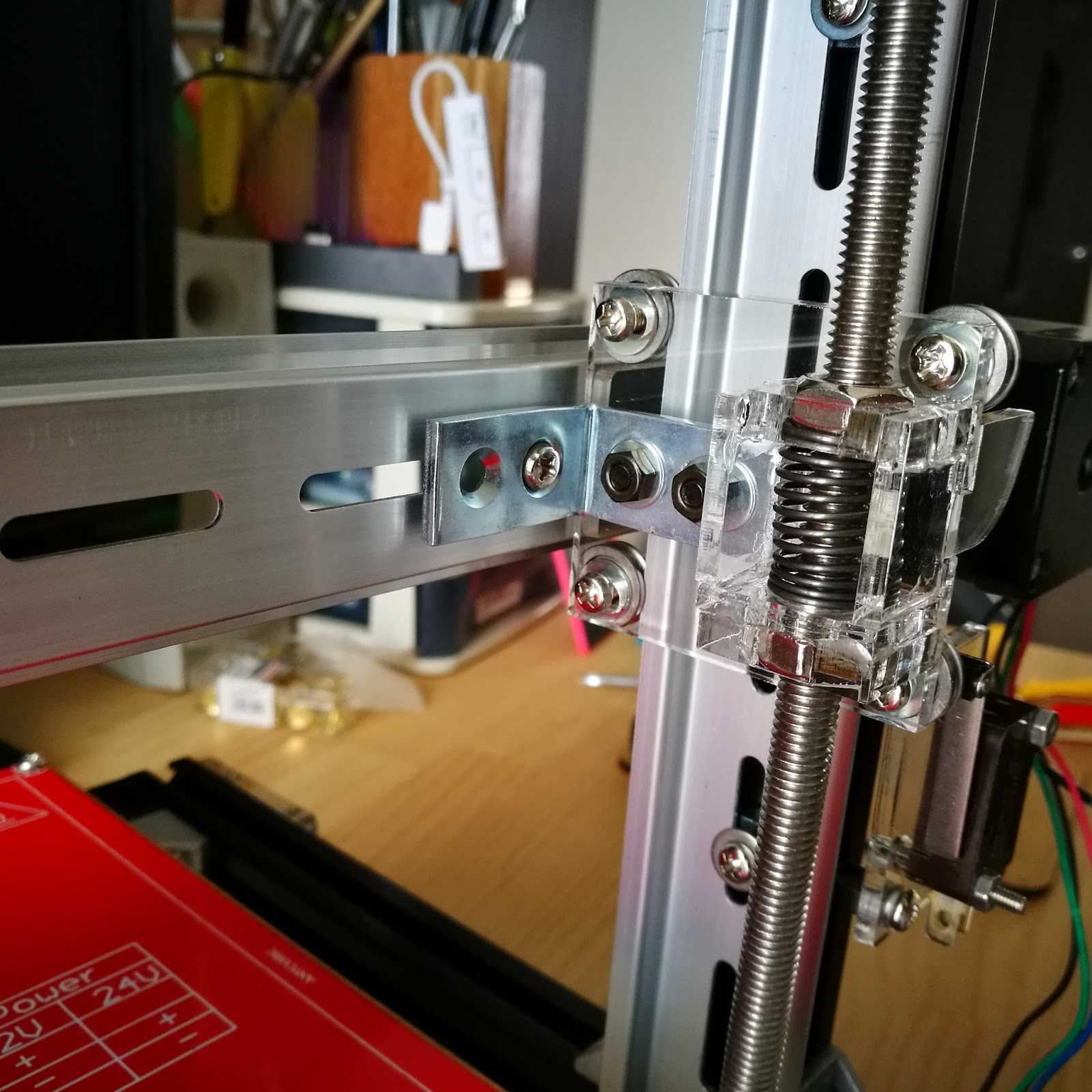
Z軸のベアリングホルダにX軸を保持するためのL金具を取り付けます。
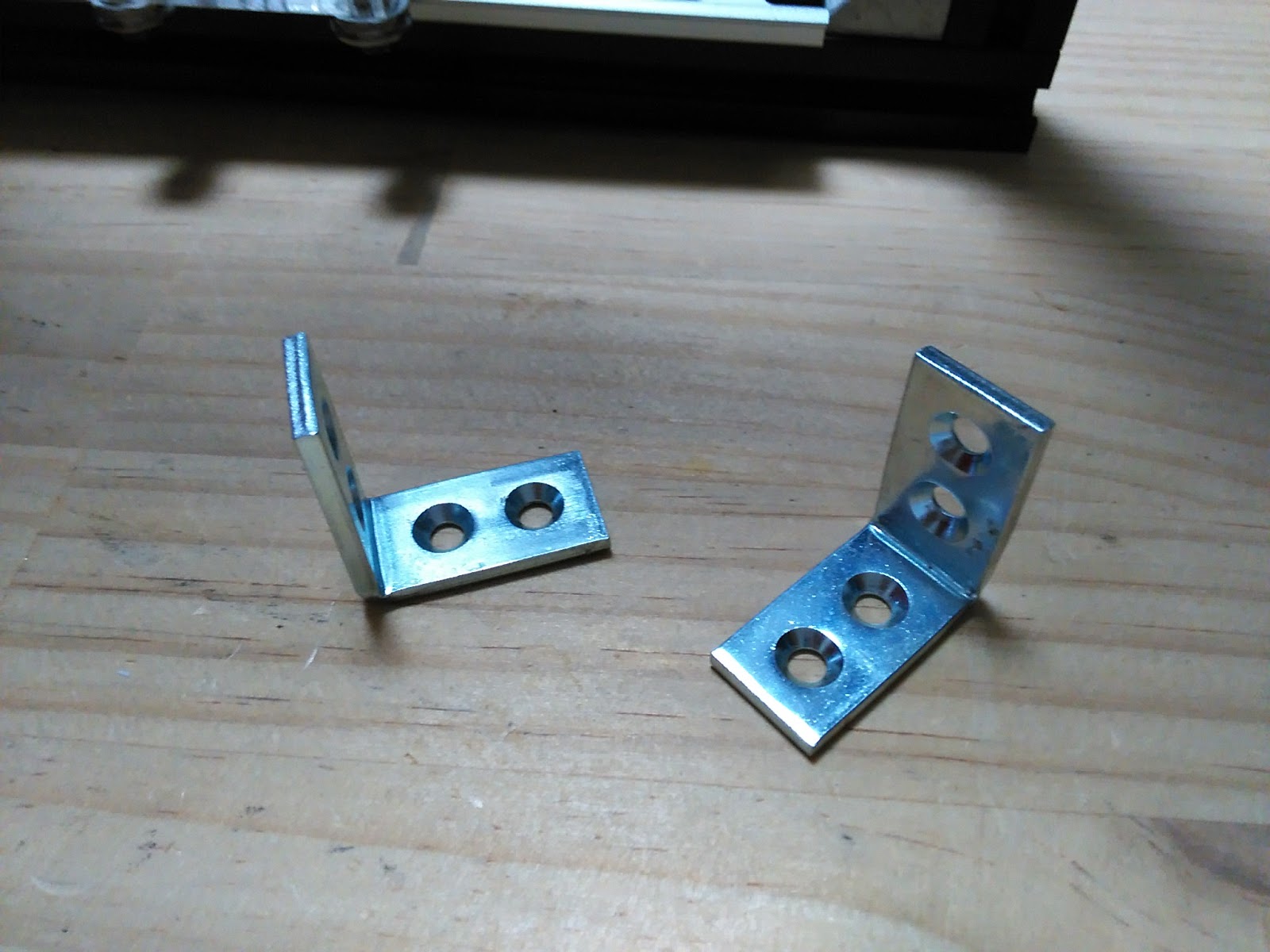
DINレールに干渉しないようにザグって皿ネジを入れます。

付きました。
なかなかに複雑な構造です。
これをレールに通しておきます。
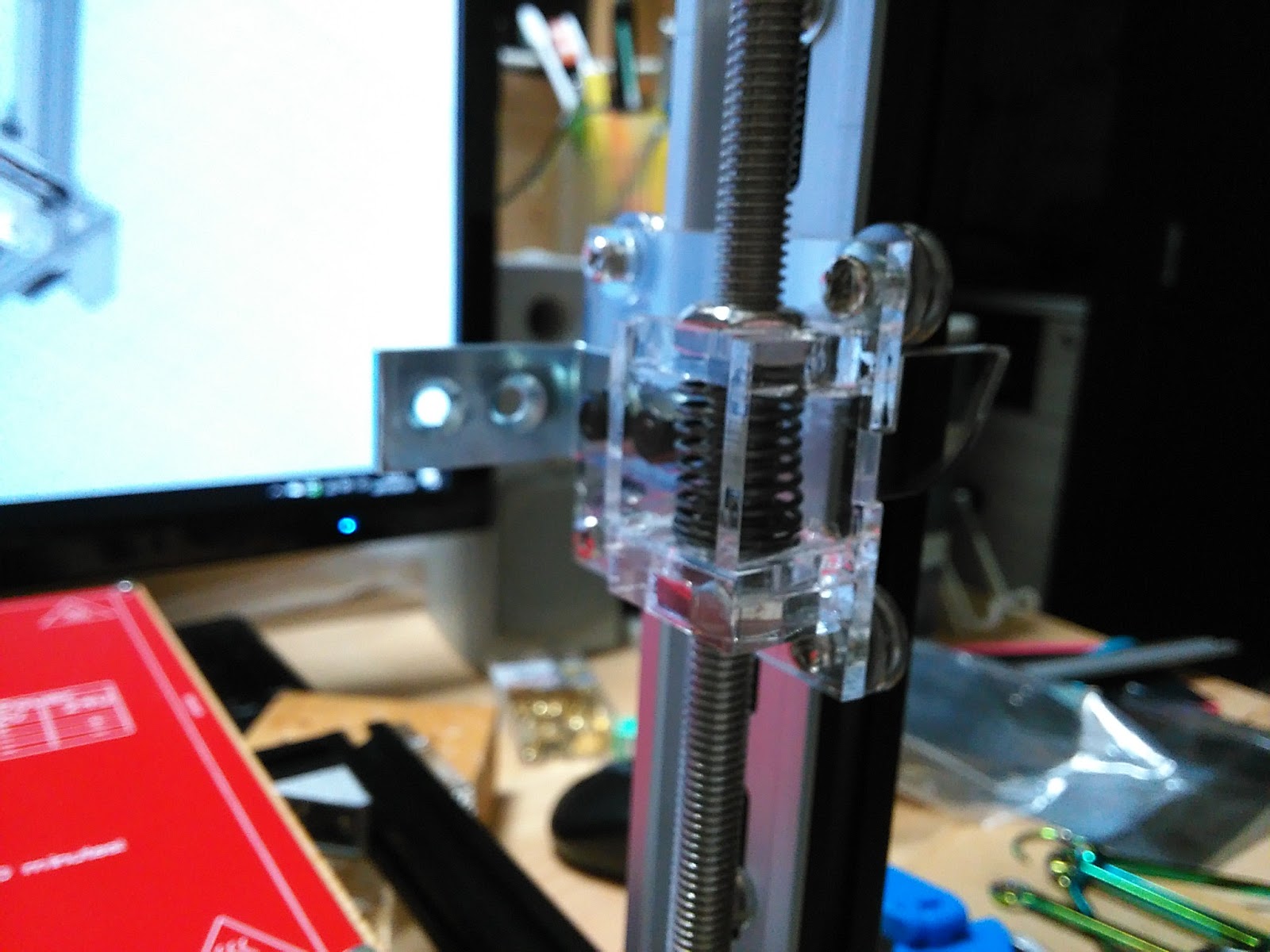
もう一方のZ軸のベアリングホルダにはリミットスイッチを押すためのカムが飛び出していますので、力をかけないように注意してザグリ加工を行います。
ビビッてやったので汚い。
まあいいでしょう。
いよいよZ軸の組み立てです。
門の位置を調整して本締めします。前のフレームに対して門の柱が等距離になるように調整して固定します。
Z軸モータと送りねじはこのフレキシブルカップリングで繋ぎます。
モータ軸に締め付けて、
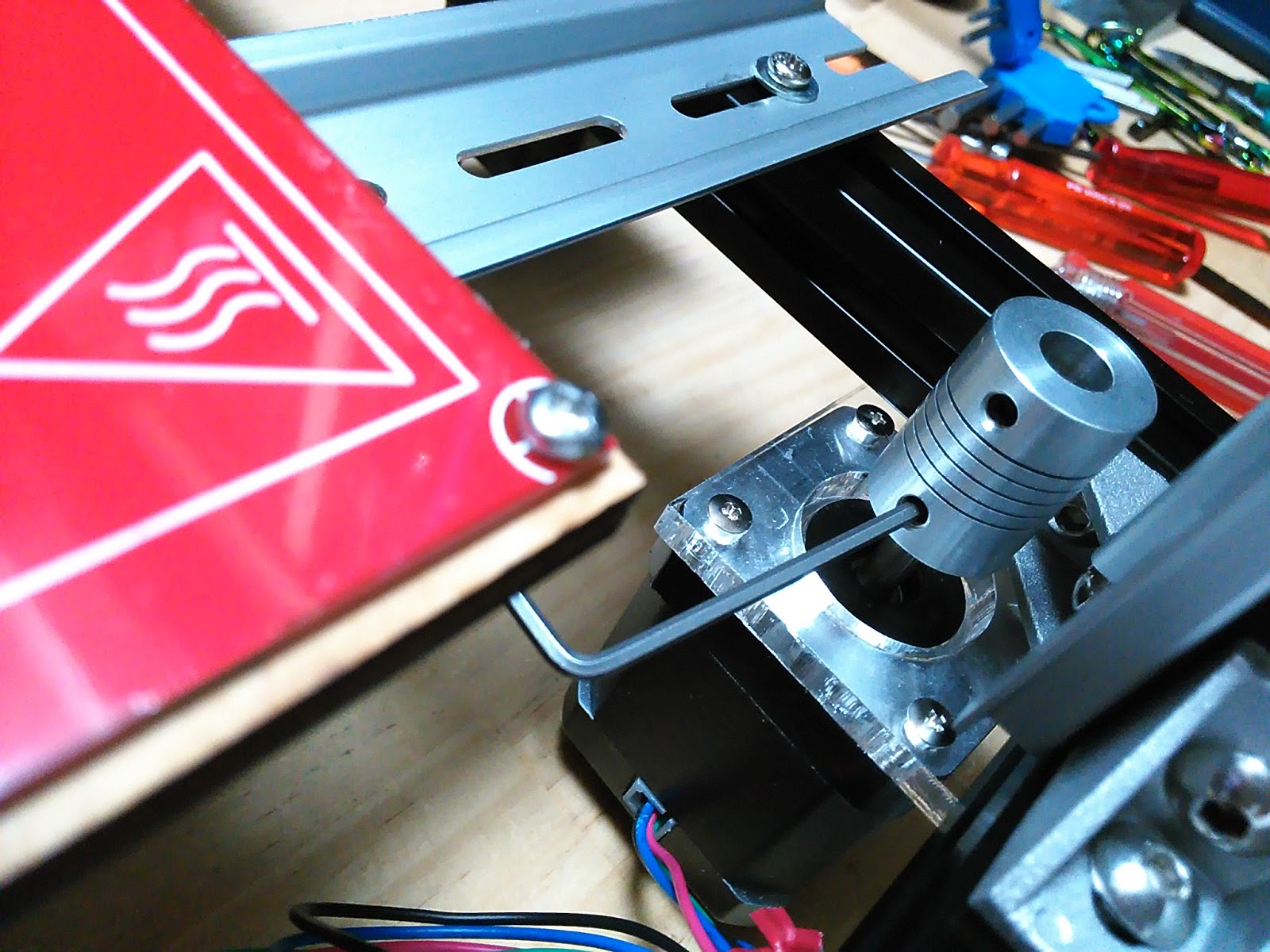
上から見て位置を確認します。芯はあっているように見えますね。
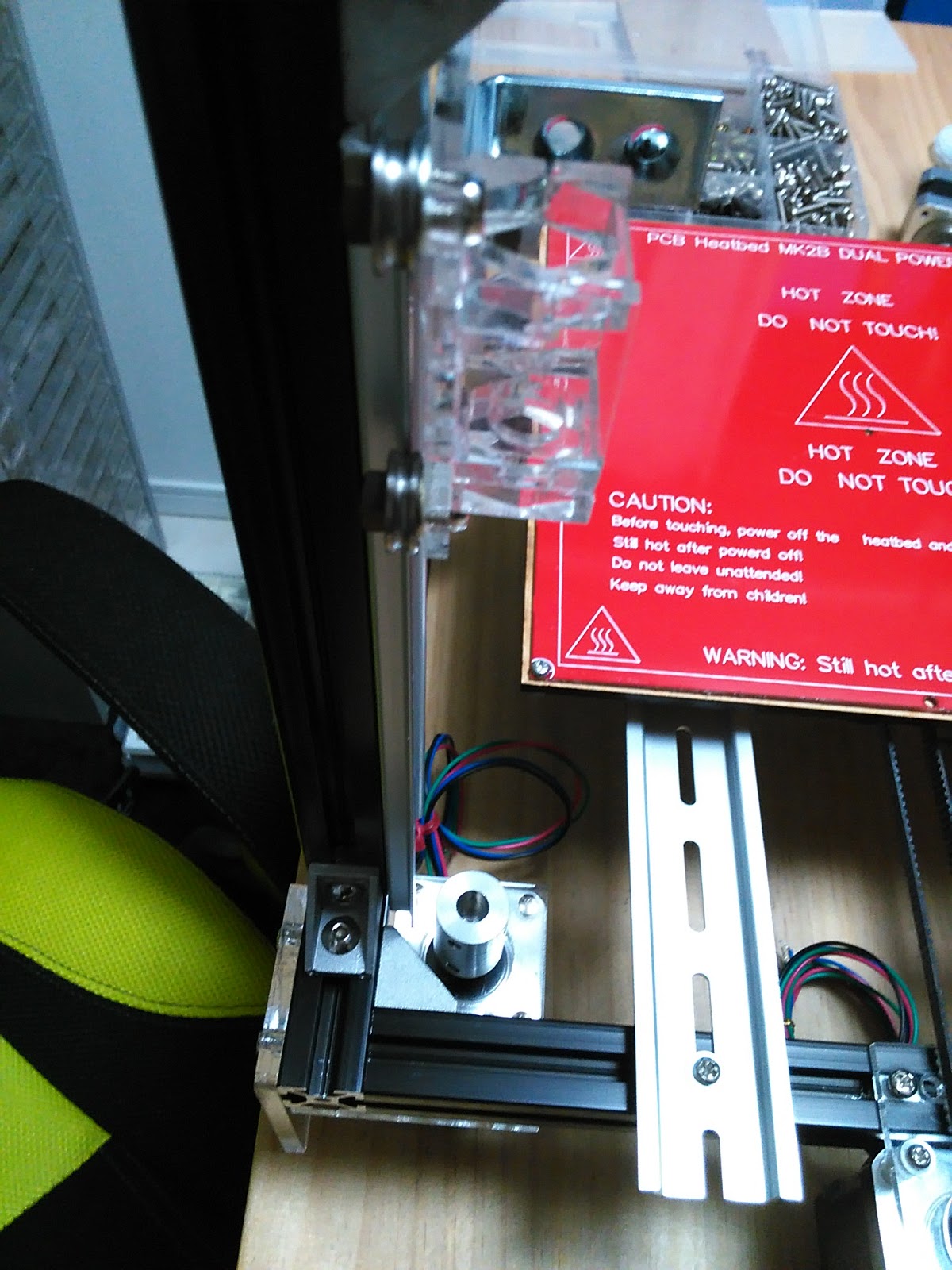
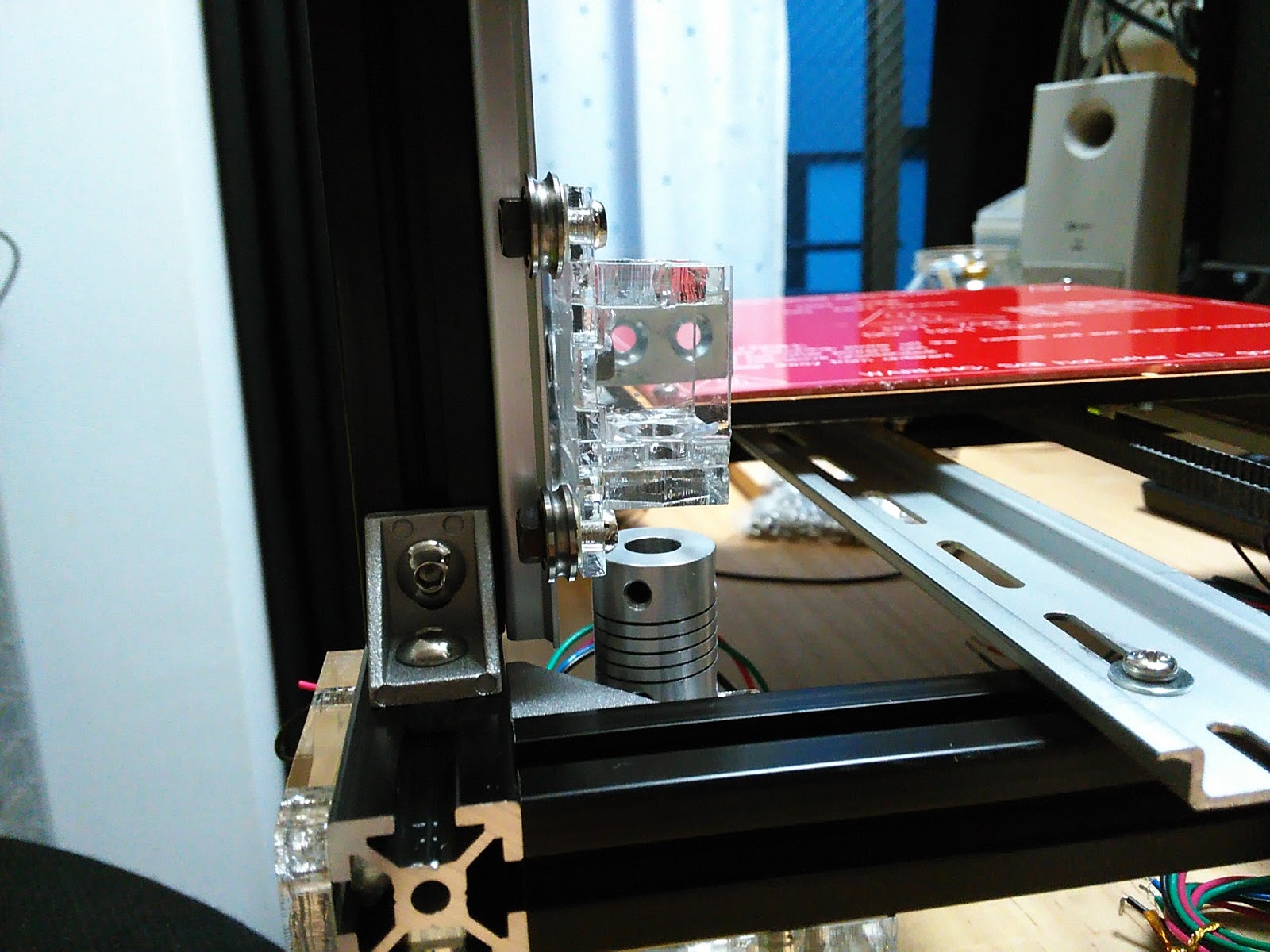
下の方に落としてもう一度確認します。ほぼ問題ないように見えます。
送りねじ入れていきます。
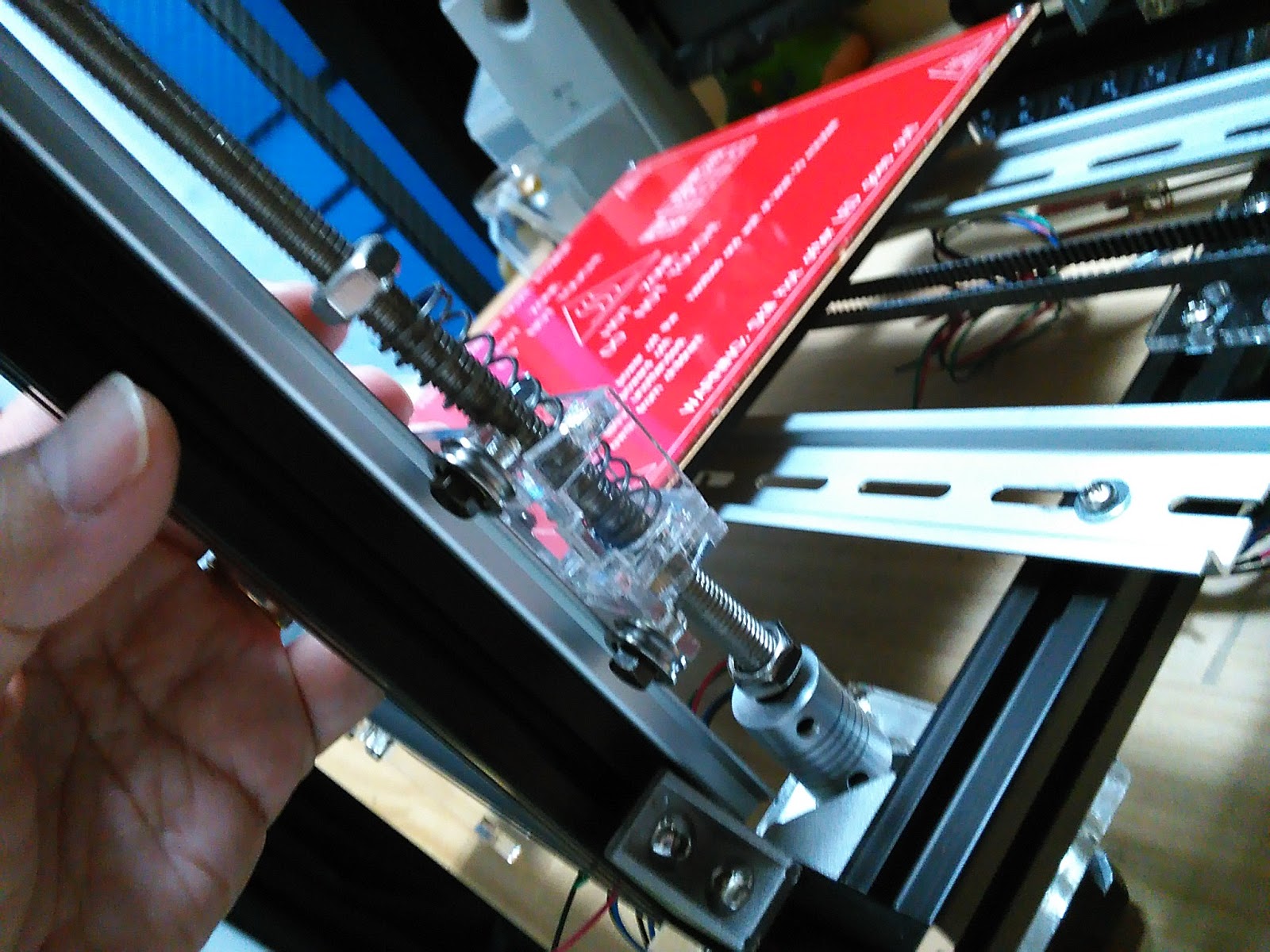
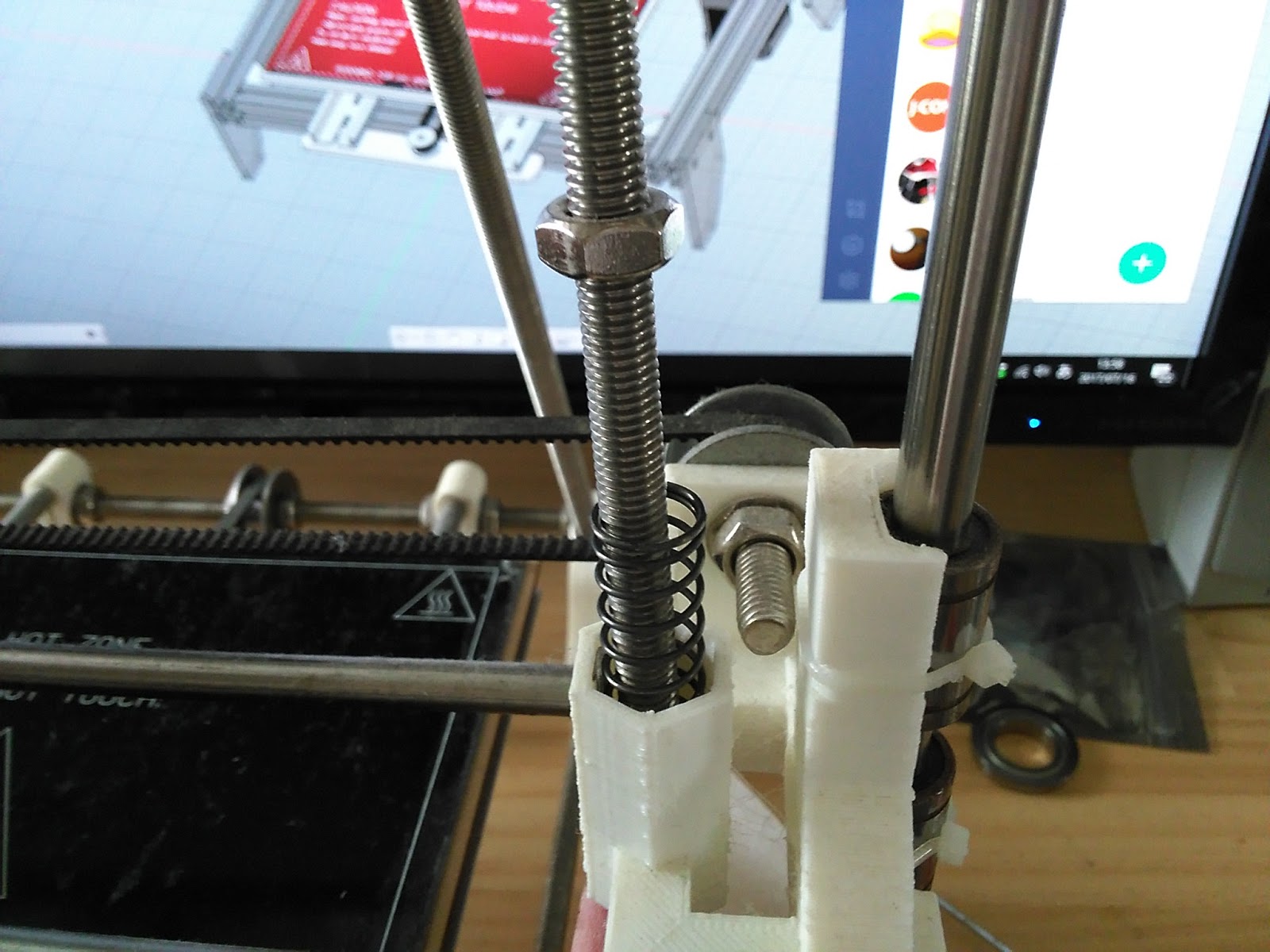
送りねじの二つのナットとバネ、そしてベアリングホルダというかZ軸のキャリッジの関係はなかなか複雑でありまして、写真ではよくわからないと思われます。
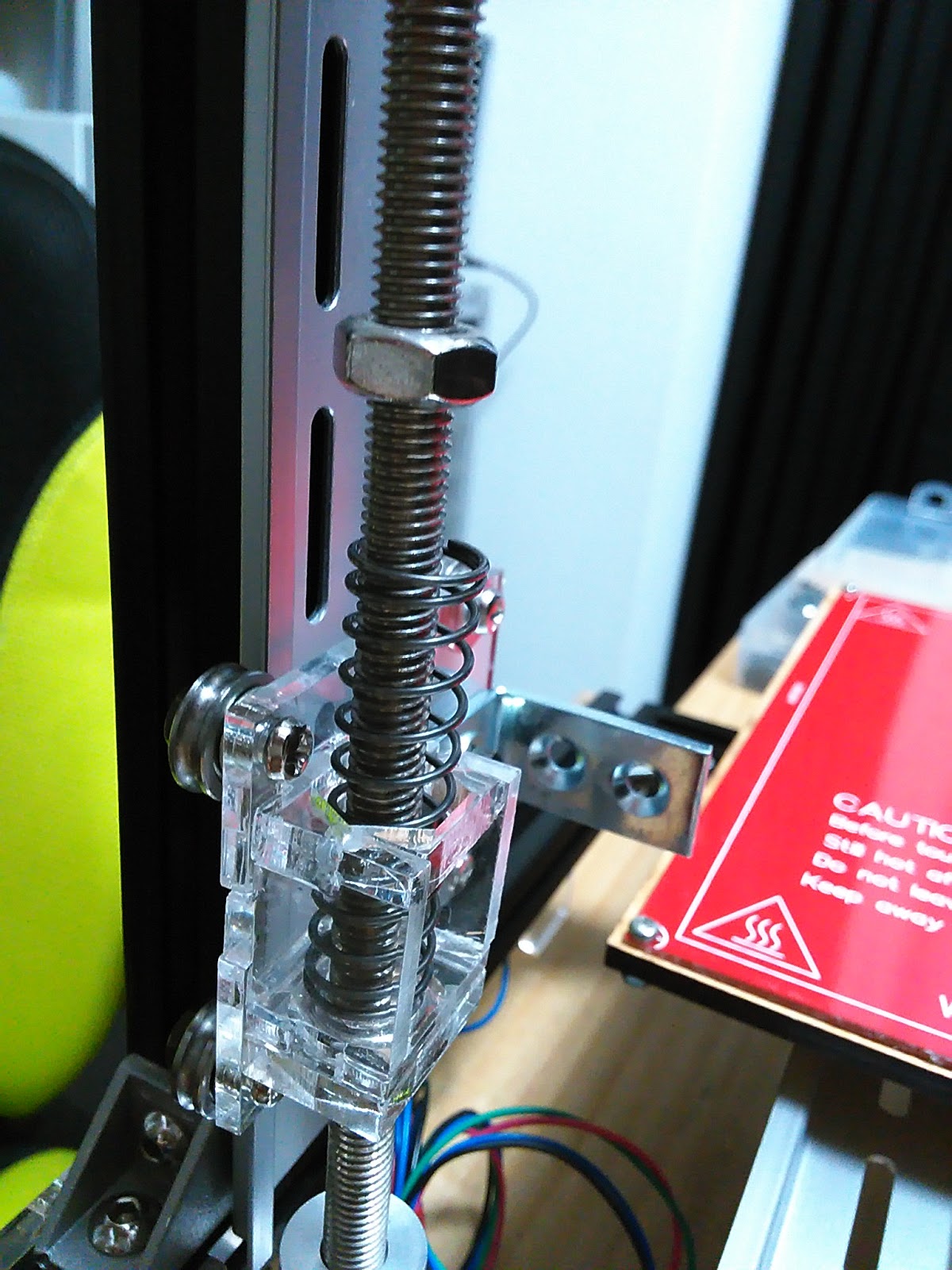
Z軸の位置を決めている、そしてX軸を支えることになるのは下のナットです。Z軸のキャリッジにあるアクリルの小部屋の床板の下にあって、床板を支えています。
そして、板を挟んだ床の上にバネの下端が乗っていて、
そのバネの反対側を上のナットで押さえつけます。こうすることで床板が上からばねで押さえられ、下からナットで支えられ、ということでガタつきが無くなるという仕組みです。
わかりますかね。
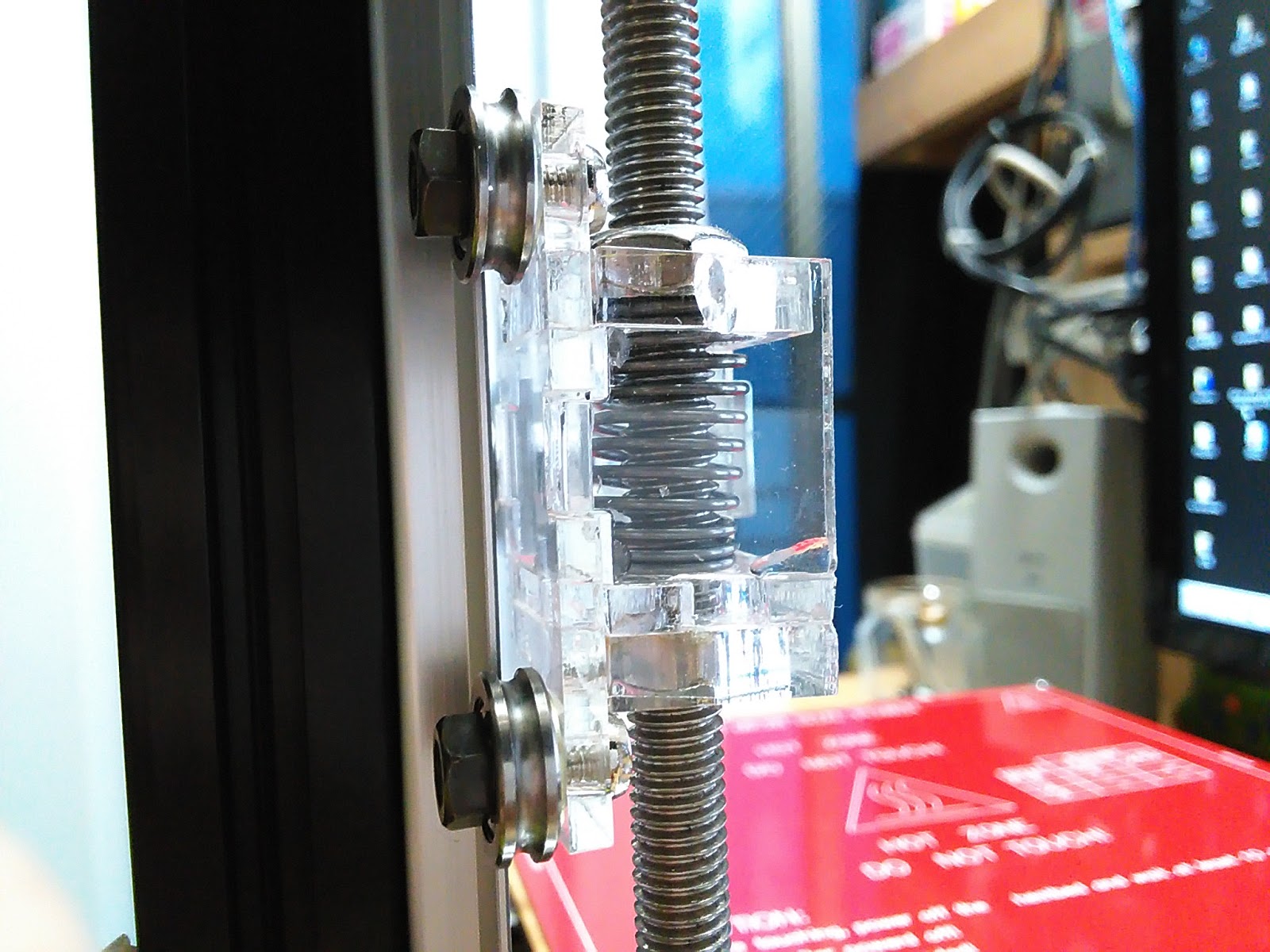
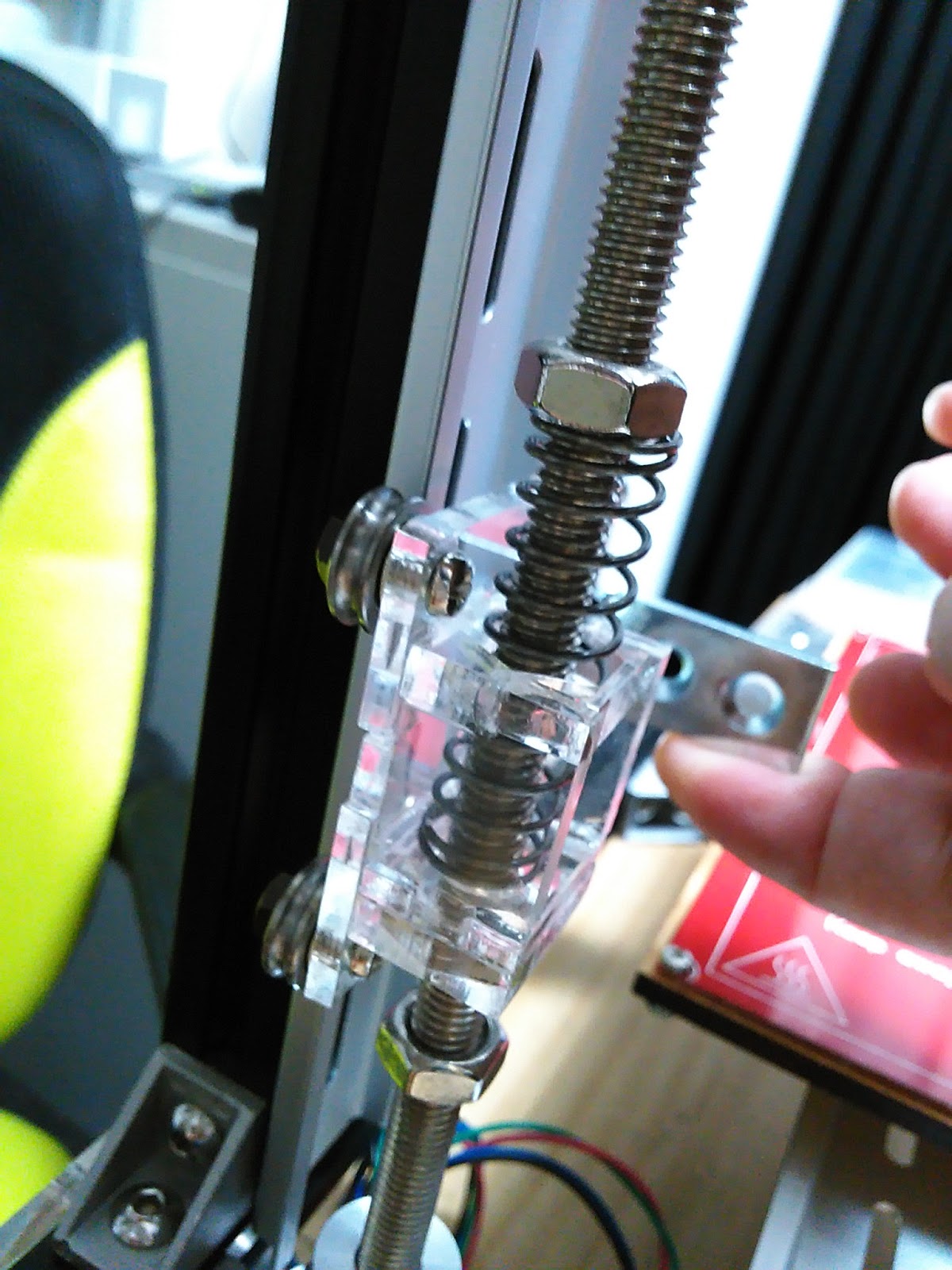
気をつけるべきは上のナットです。上のナットをフリーにしておくと送りねじが回転した時に軸と一緒に回ってしまってバネの押さえが緩む可能性があります。これを防ぐために上のナットが回転しないような規制をかけます。六角形に切り出したアクリル枠がそれで、この枠の中にナットが入るように位置調整をすることで、じくが回ってもナットはアクリルの枠の中で回転が規制されますのでバネのゆるみが生じることがありません。
なかなか賢い作りです。
もう一方の送りねじも同じように取り付けます。
出来たとこ。
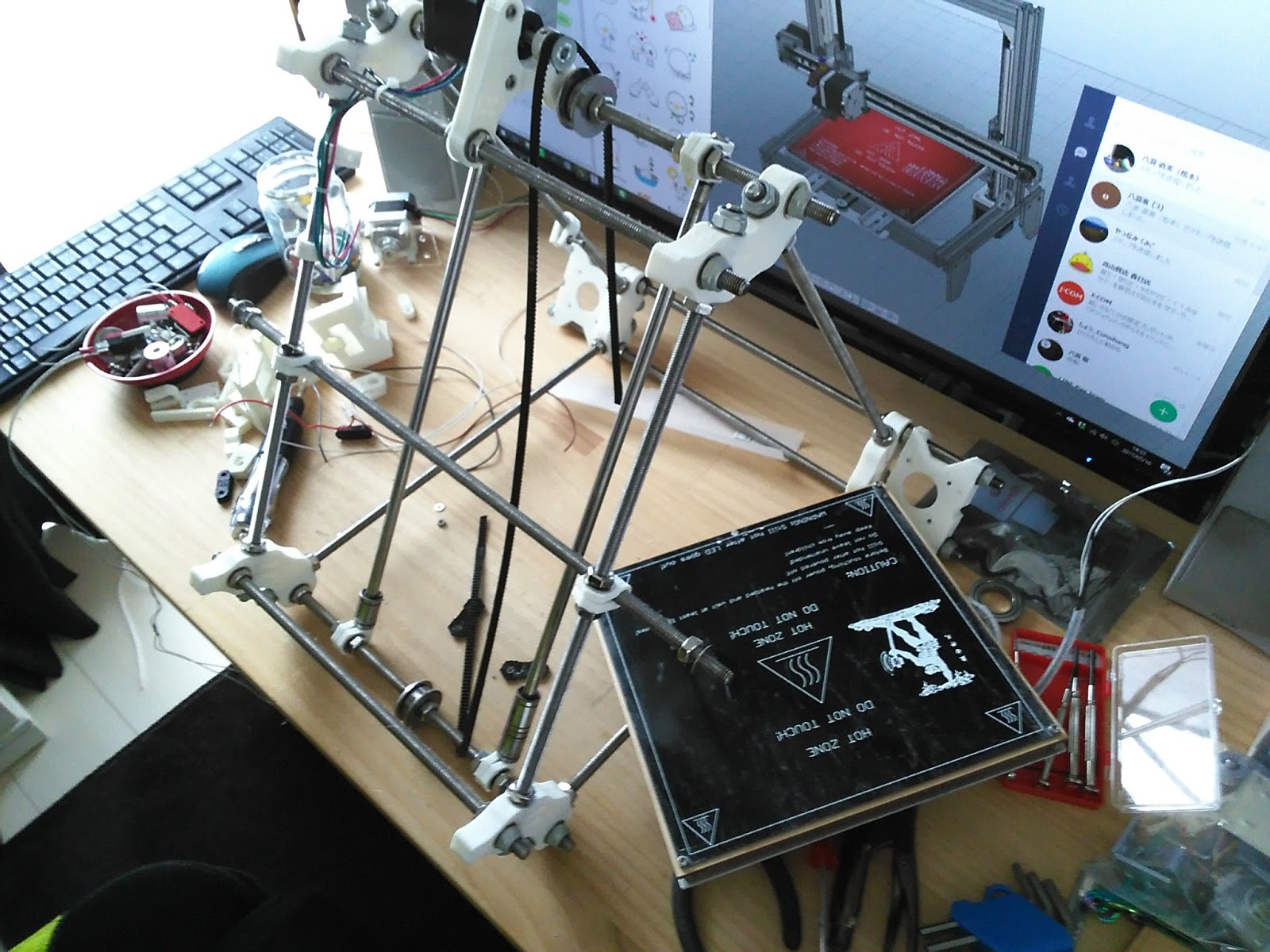
これでZ軸送りねじが二本とも取り付けられました。
送りねじを回してキャリッジがスムースに上下することを確認します。なかなか良い感じ。芯はよく合っているよううです。
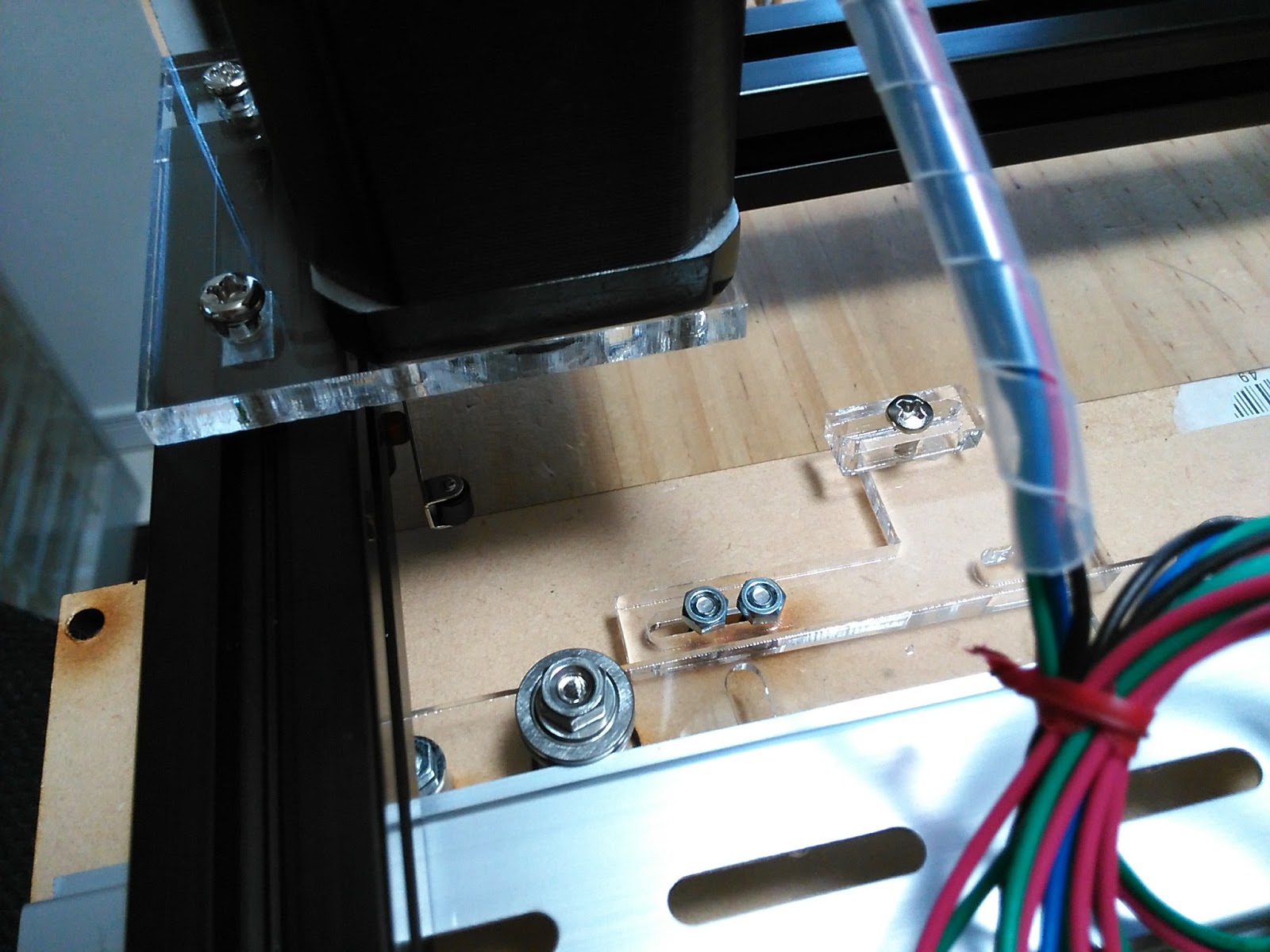
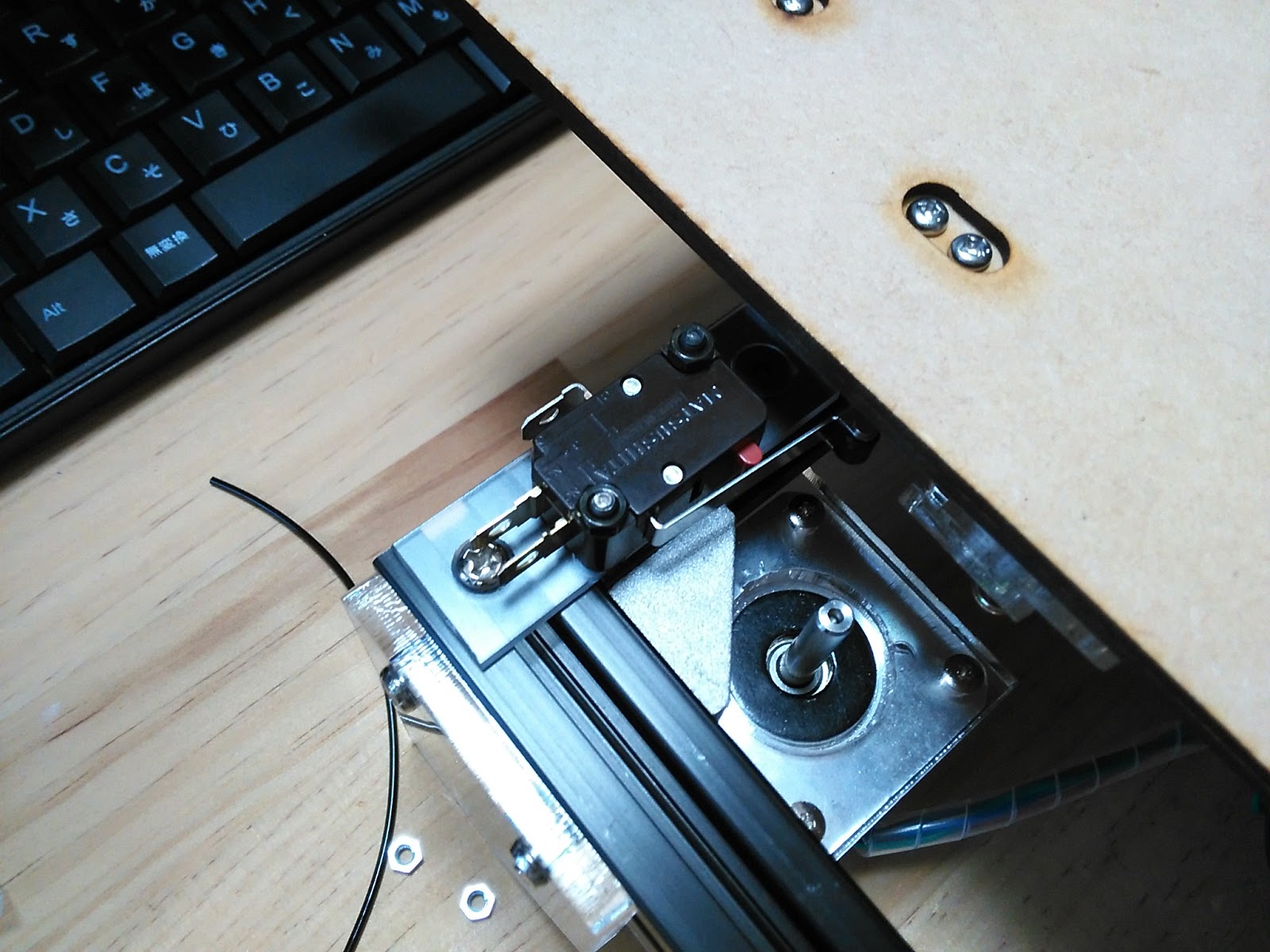
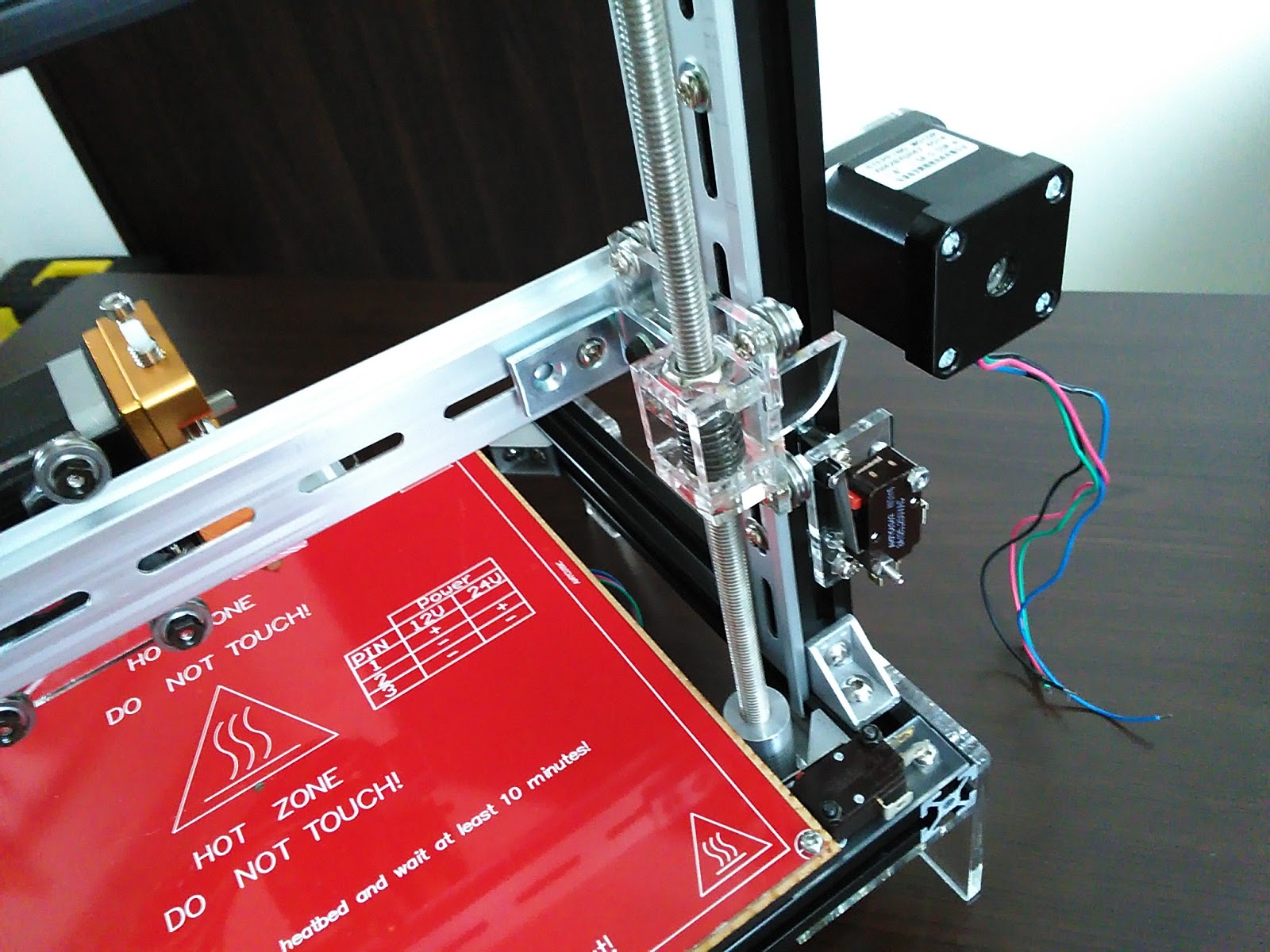
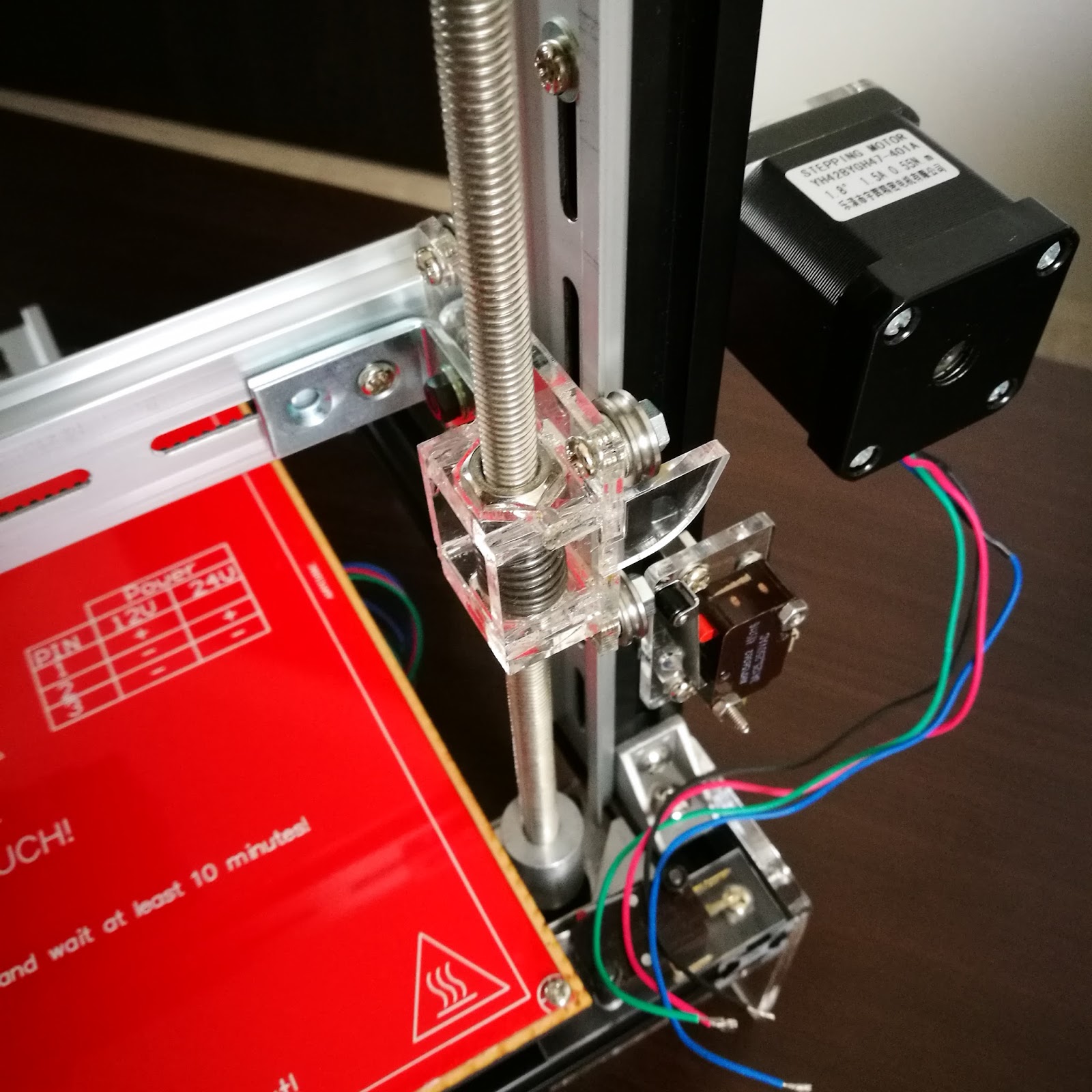
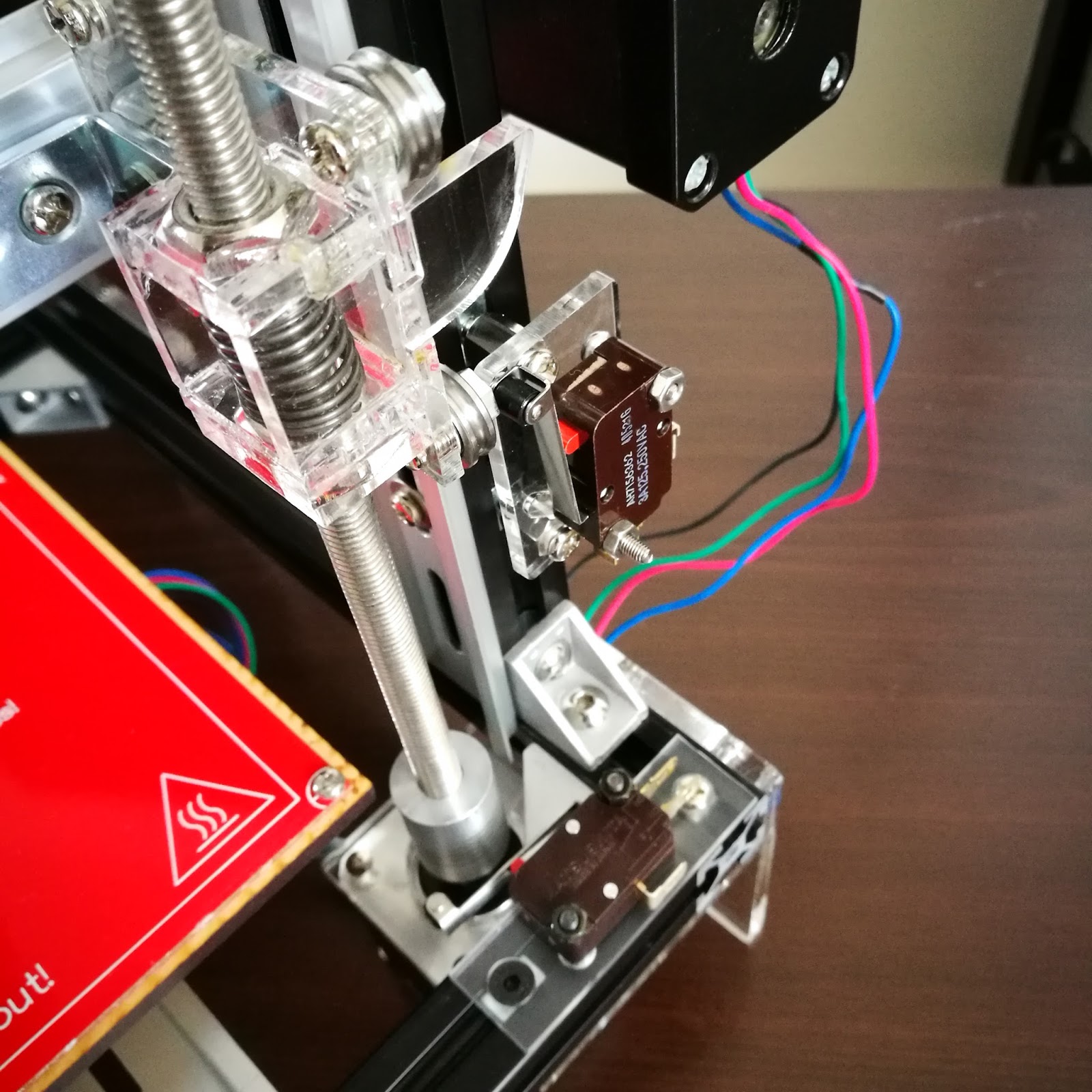
お次、Z軸のリミットスイッチを取り付けます。この位置の微調整のためのへんなスロットがあるパーツを使います。

リミットスイッチを、
取り付けて、
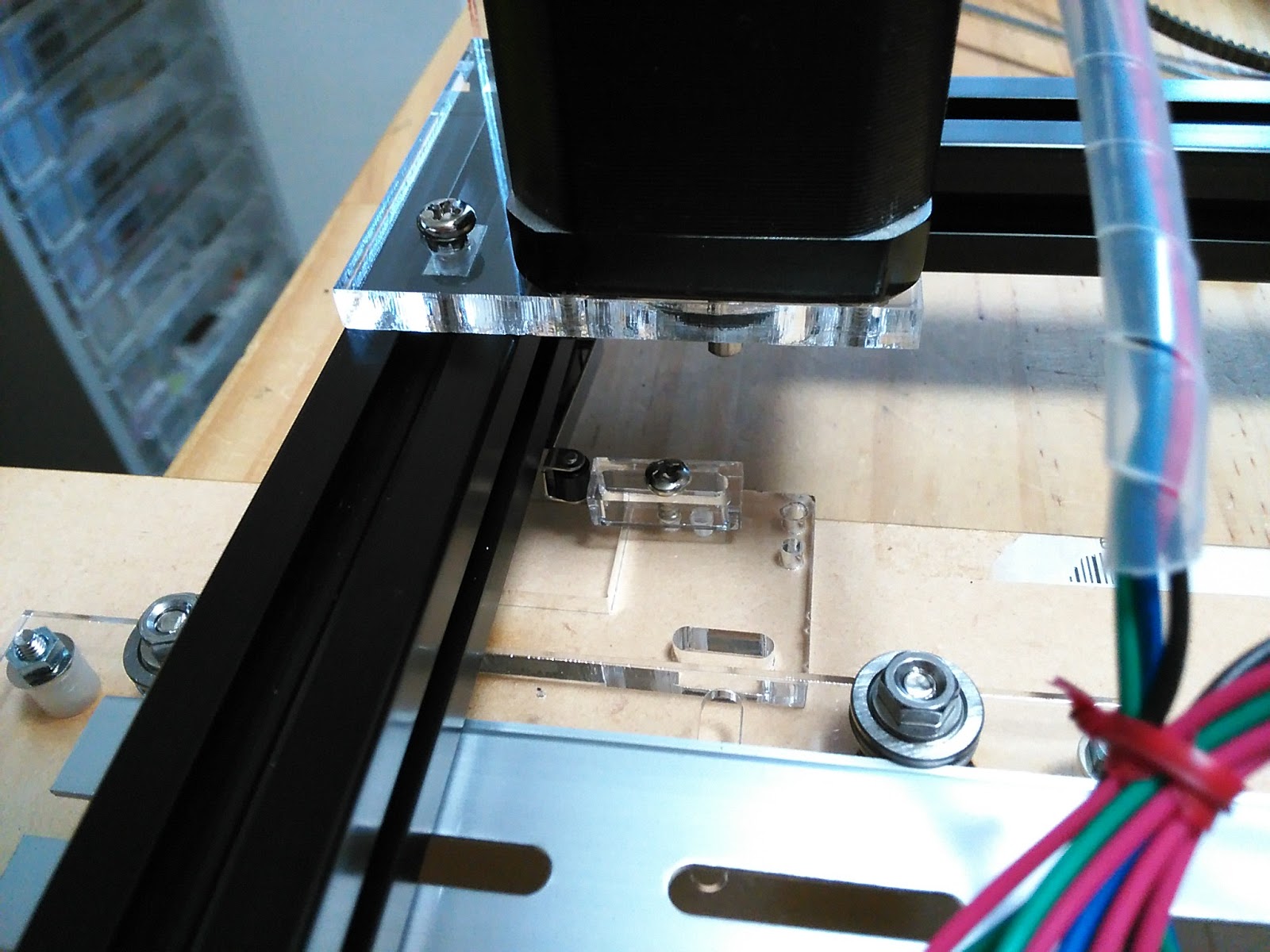
Z軸に仮固定し、動きを見ます。これはフリーの状態。
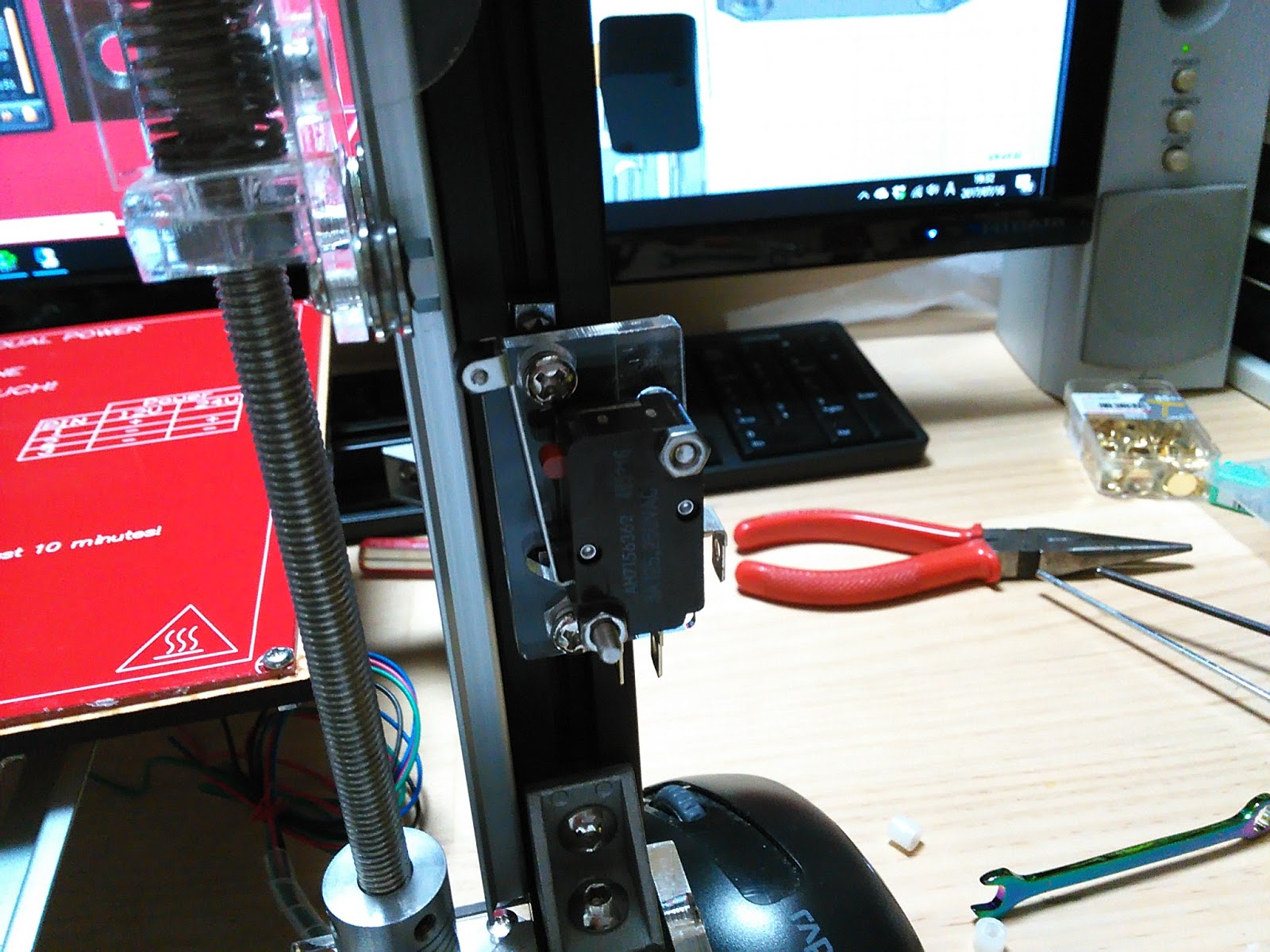
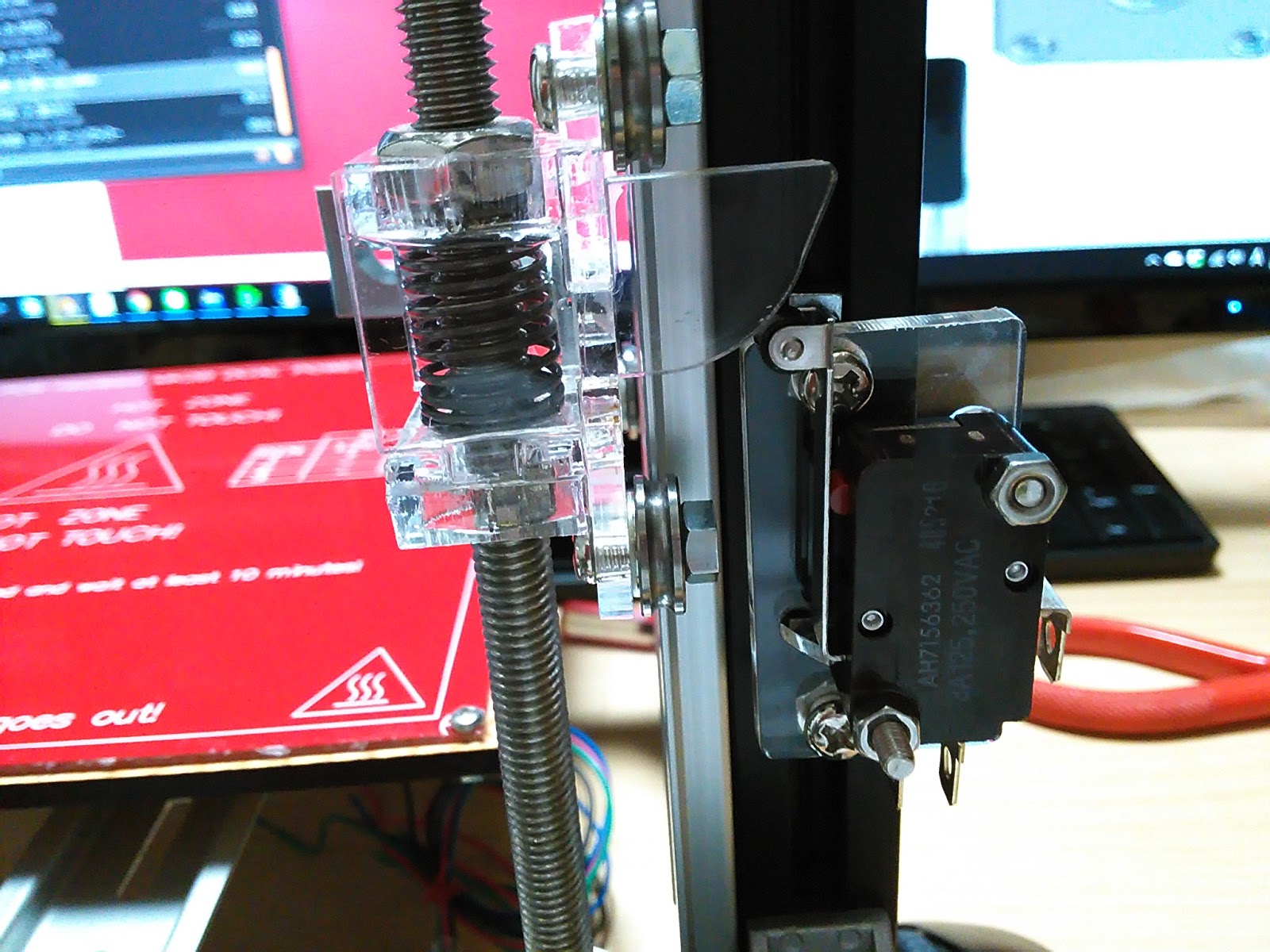
これがカムがリミットスイッチのノブを押し込んでスイッチが入った状態。構想通りの動きでいい感じです。
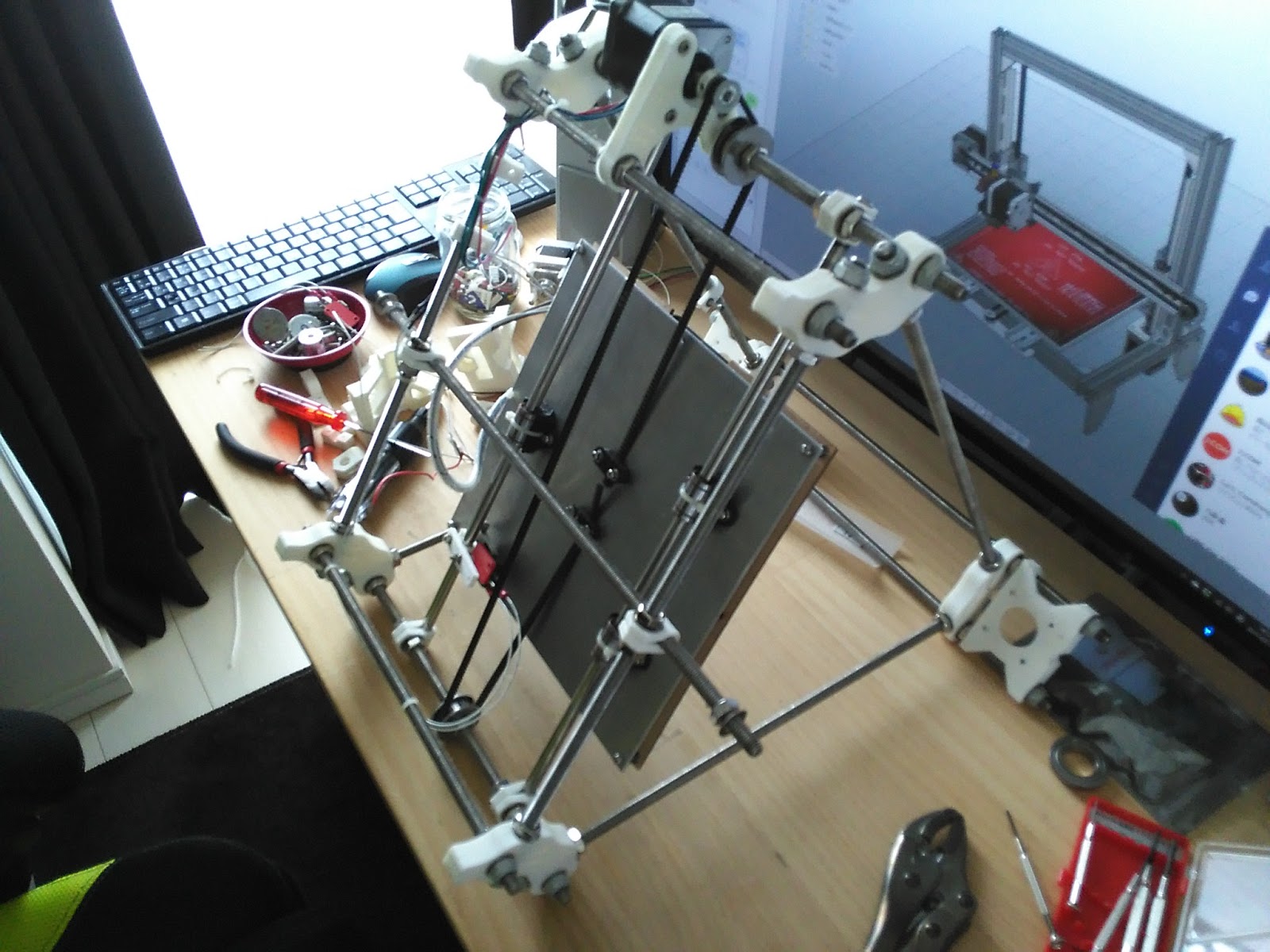
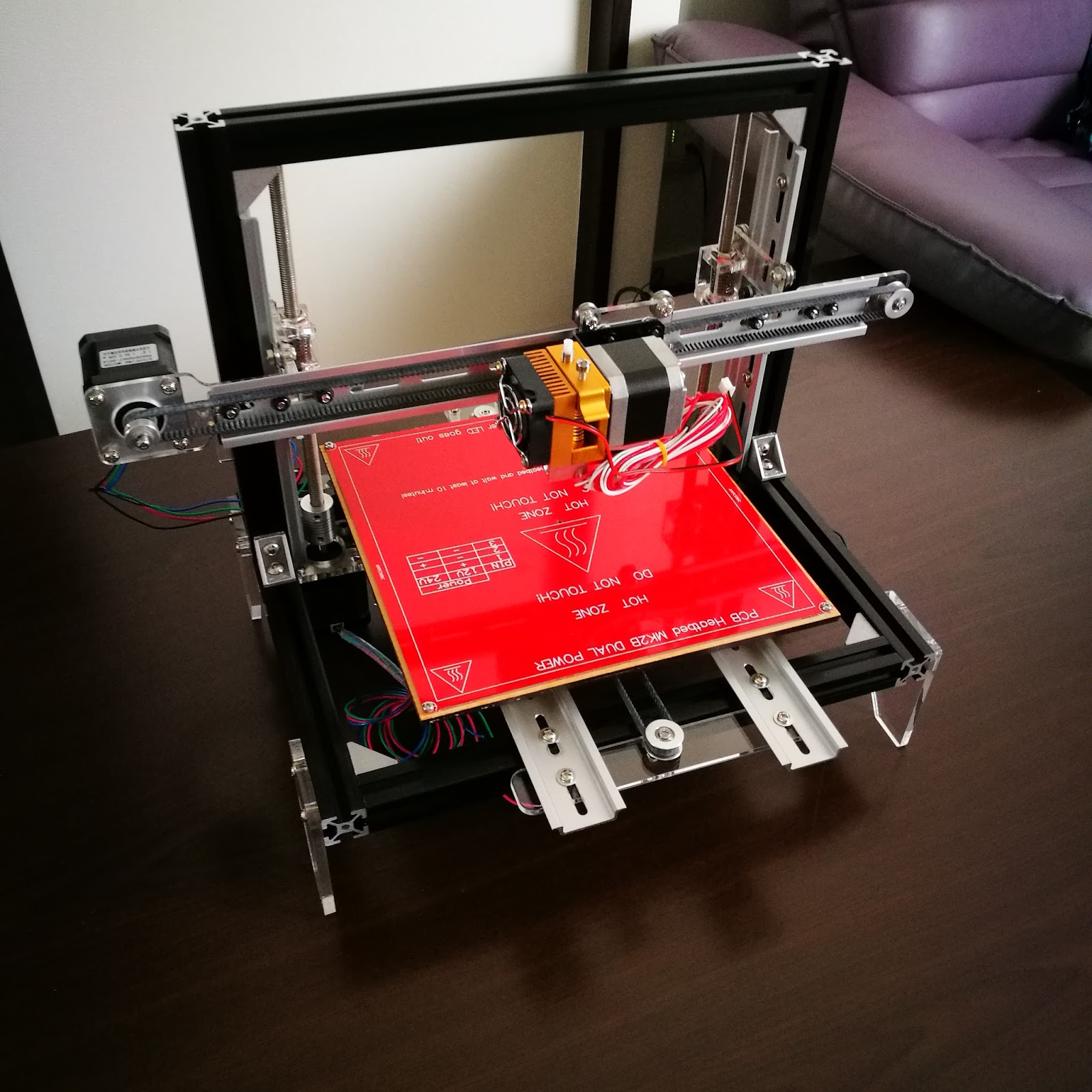
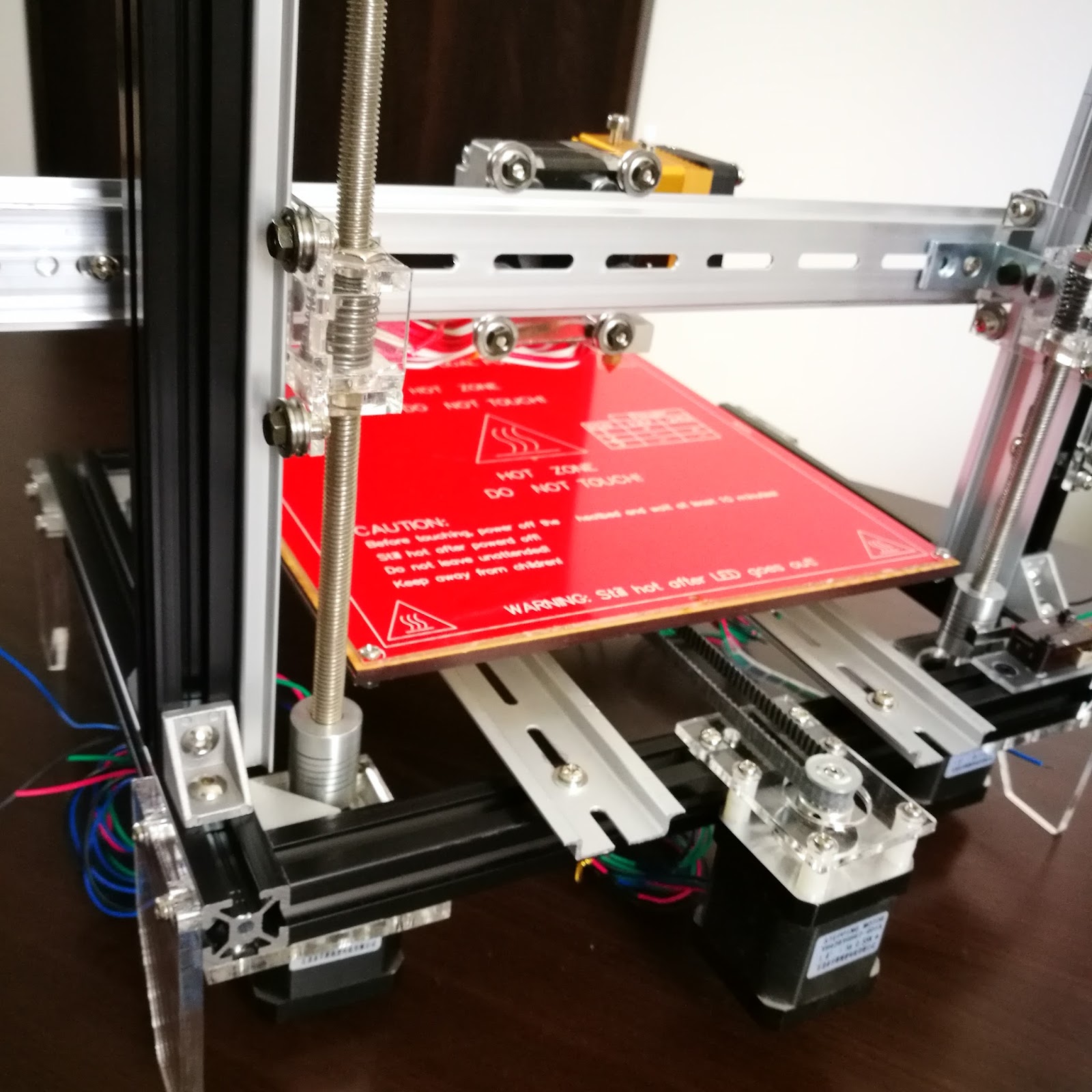
これでZ軸もメカ部分は完成しました。
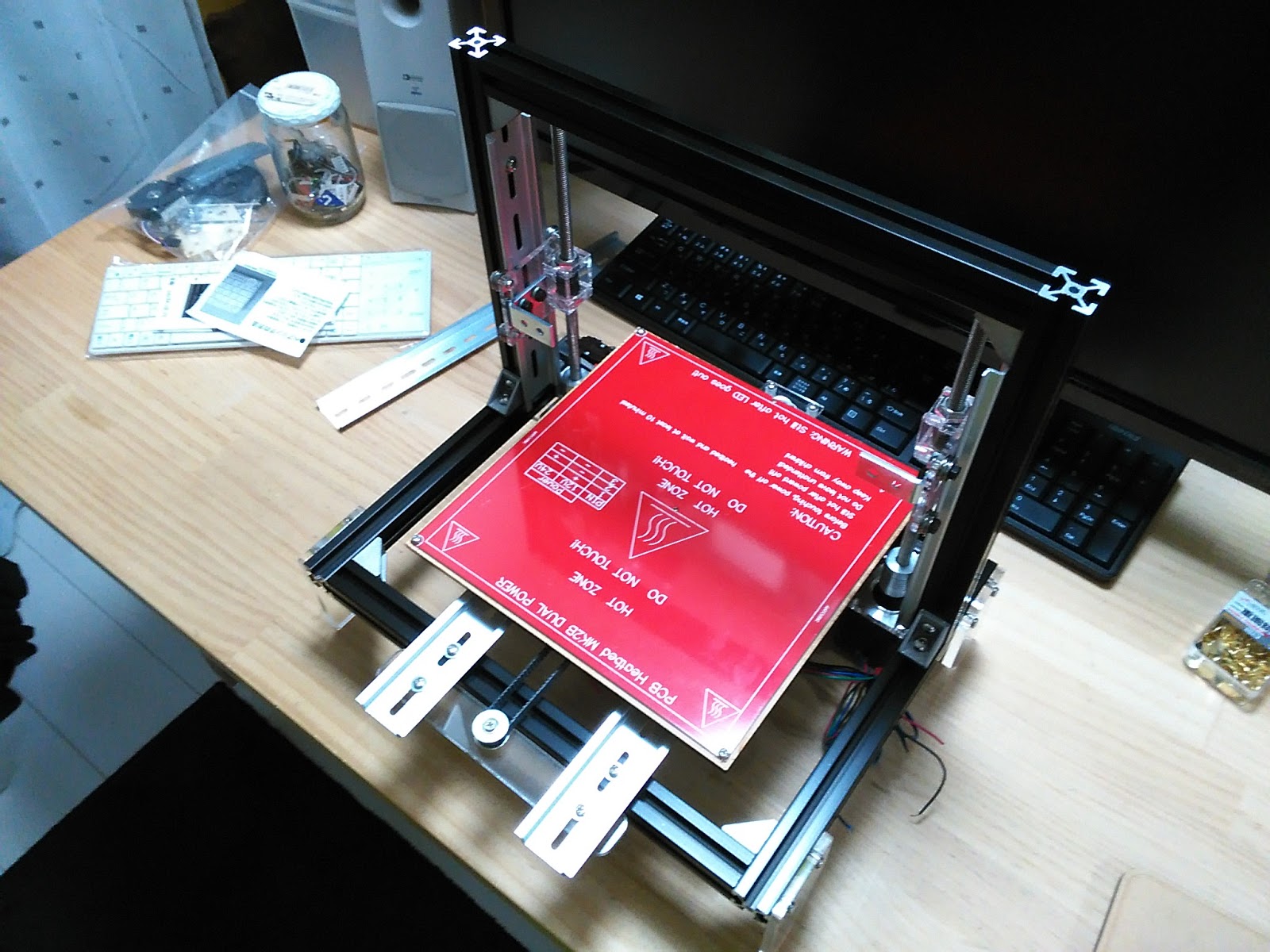
いやあ、かっこいいですね。しばし眺めてしまいます。
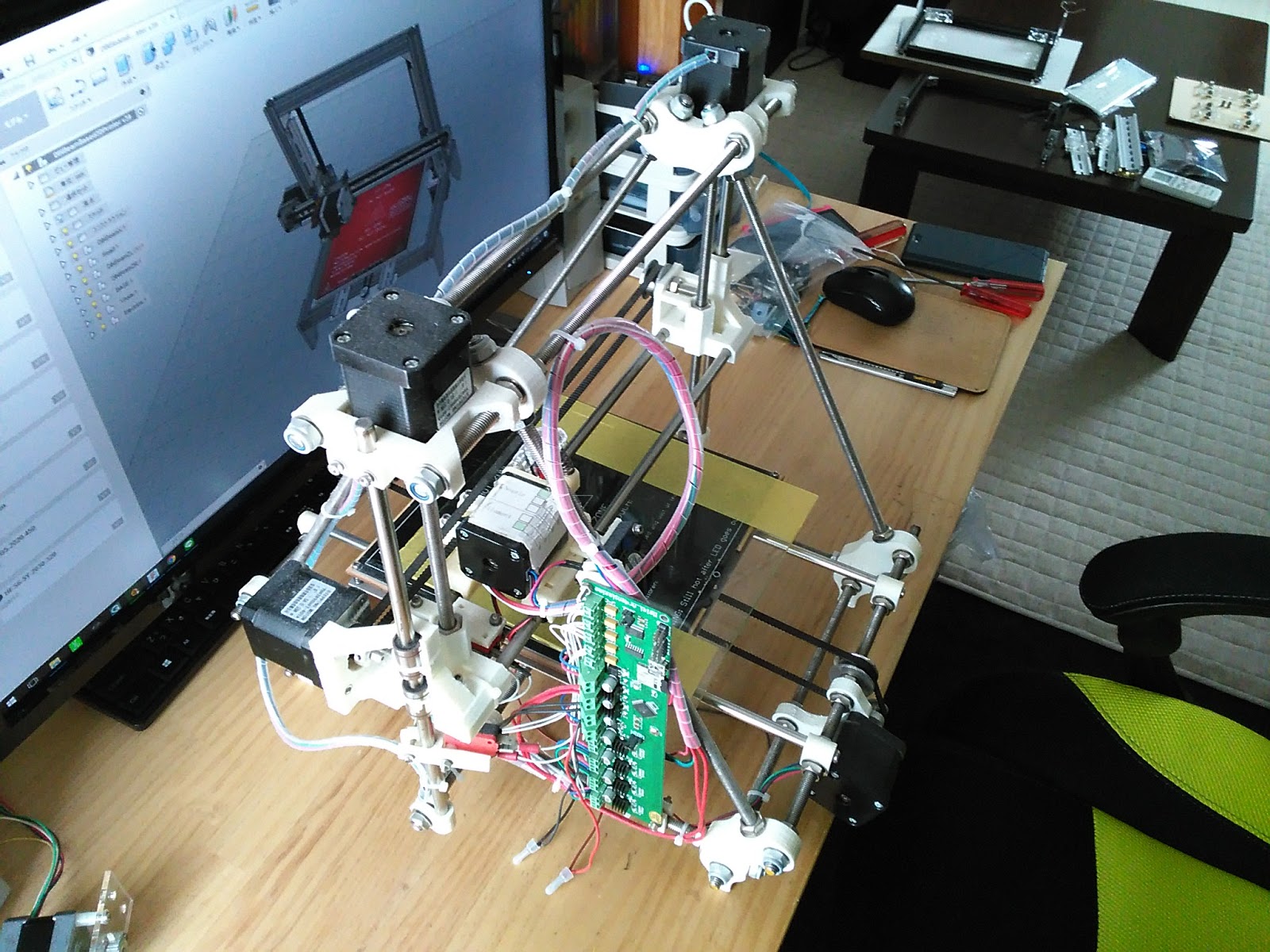
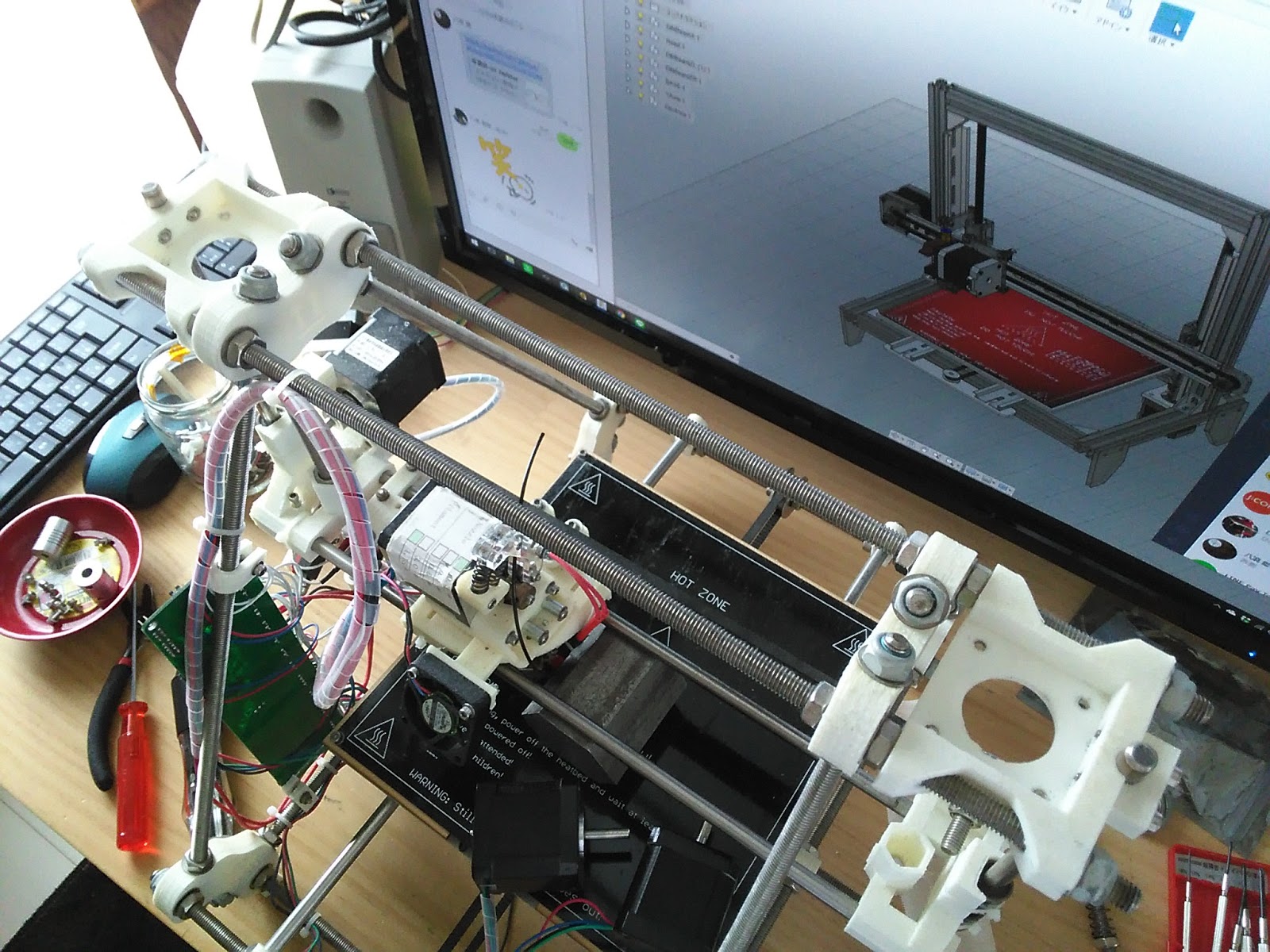
基本的な構造はfusion360上で検討済ですので大きな間違いは生じません。三次元CADの力をいかんなく発揮というところですか。まったくもって素晴らしい。
ではいよいよ最後の軸、X軸の組み立てにかかります。
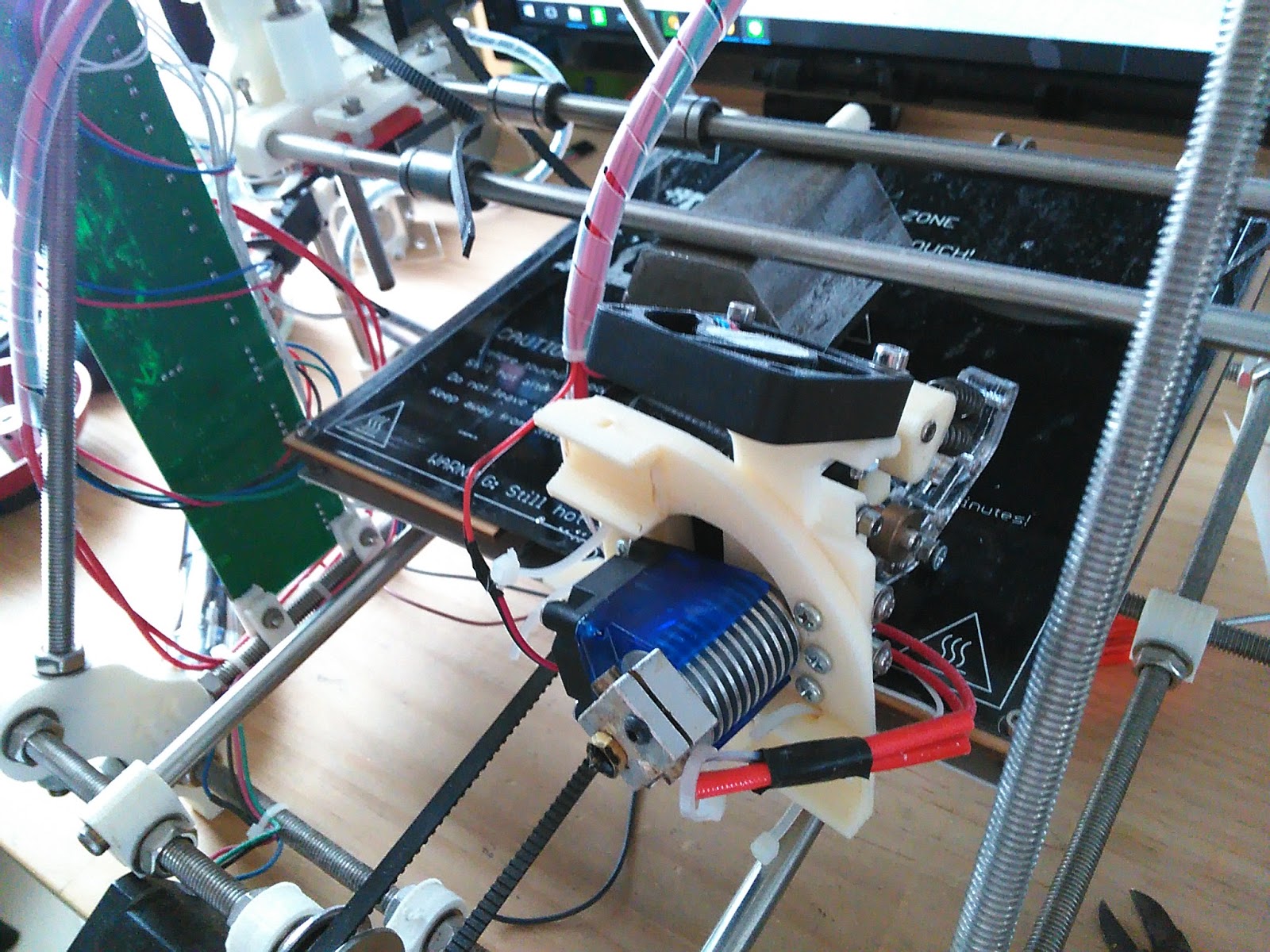
使うのはこのE3Dヘッドです。
一旦ばらして締め付けを確認しながら組み立てます。
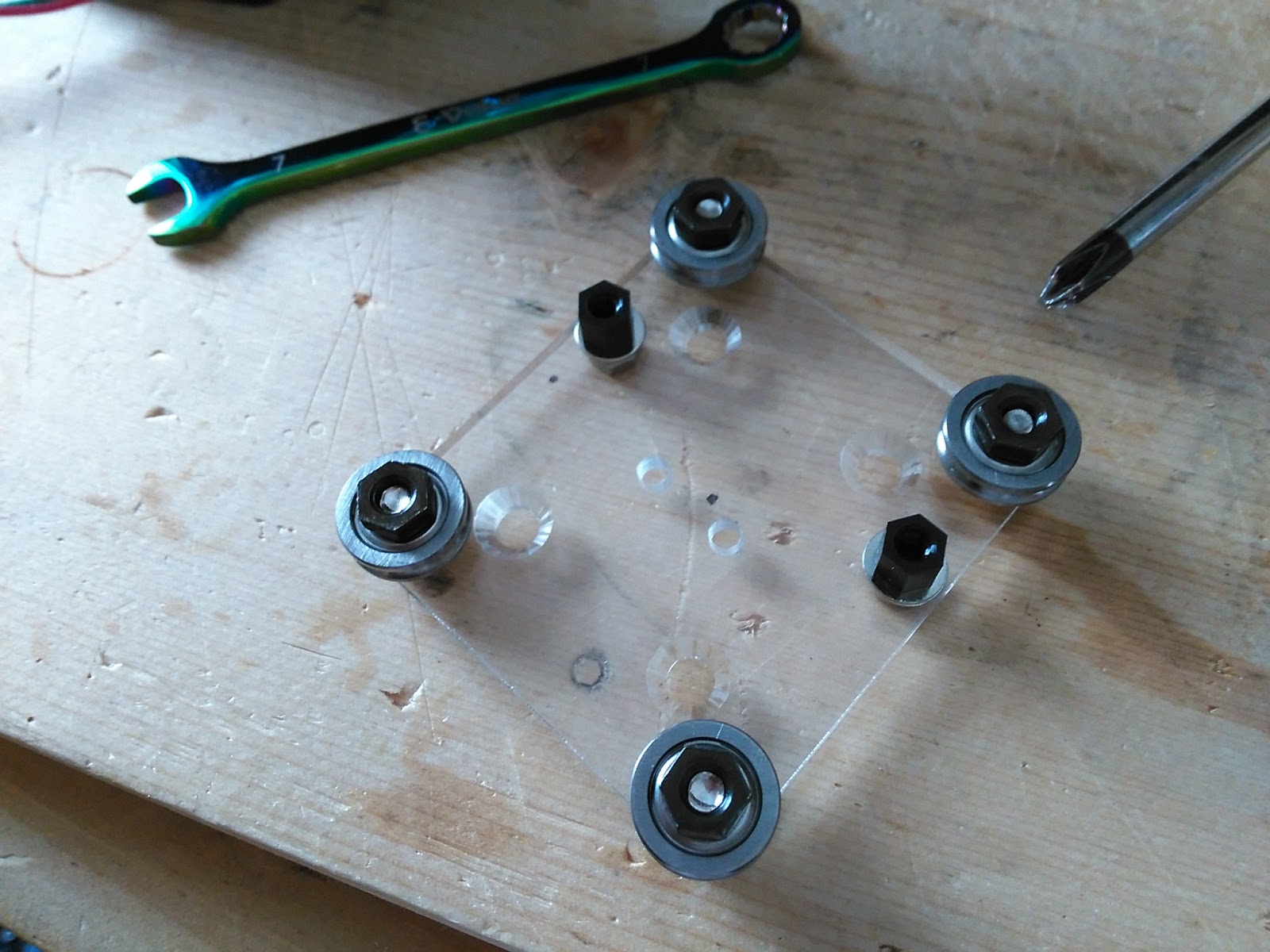
X軸のキャリッジはこれ。ヘッド取り付け用のM4穴を裏からザグっておきます。
ベアリングつけてガタが無いように調整。
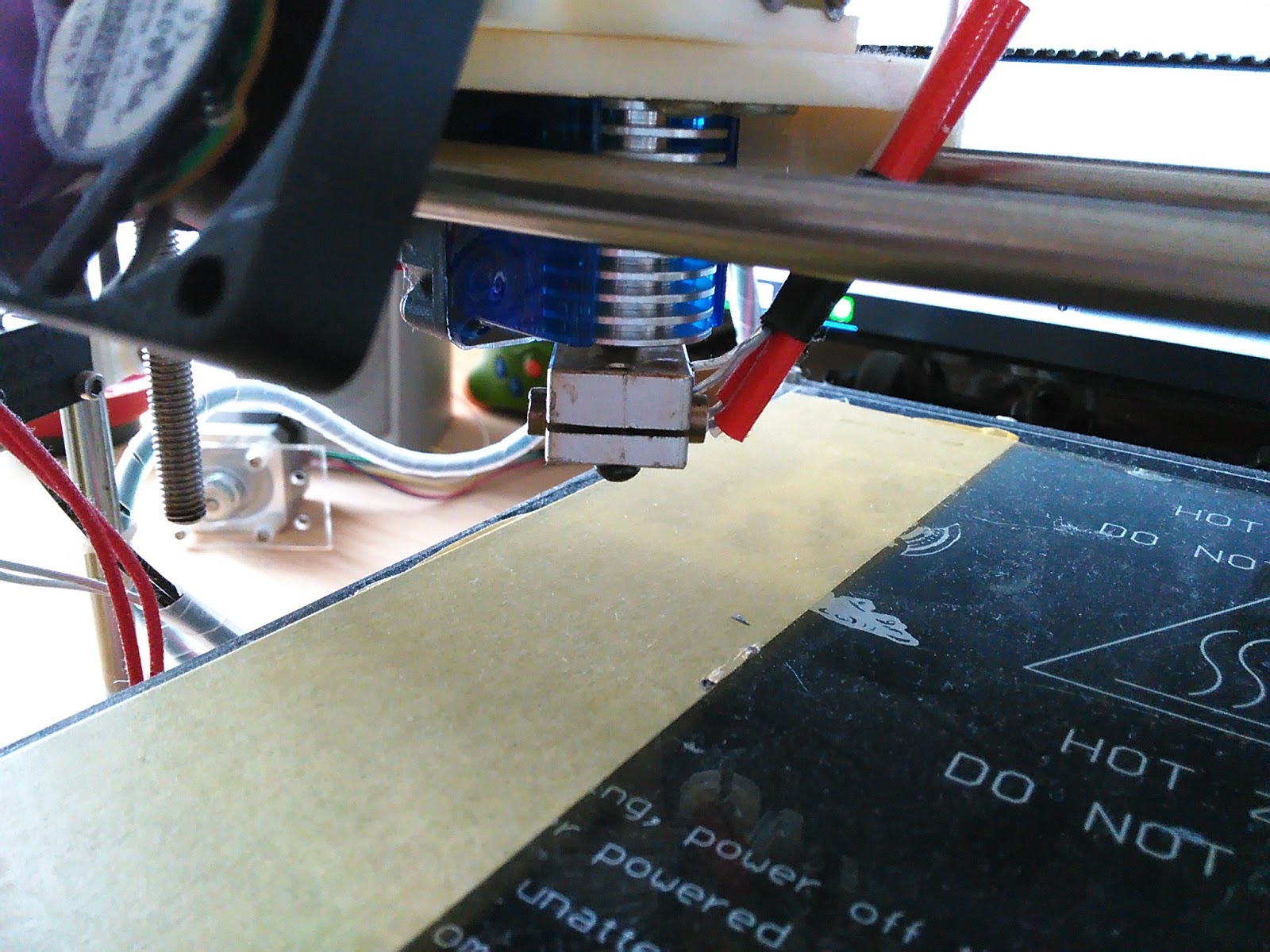
ヘッドを取り付けてみます。
ザグリ穴に皿ネジが落ちて裏はフラットです。目論見通り。
DINレールに入れてみます。

実にスムースであります。動画でどうぞ。
動作が確認できましたのでベルトをかけます。
裏側にピンを立ててそこにベルトをひっかける構造とします。
こんな感じ。
これで、X軸キャリッジは出来上がり。
DINレールを350mm切り出します。

今回は糸のこ盤出すのが面倒だったので手で切りました。

きれいに切断。

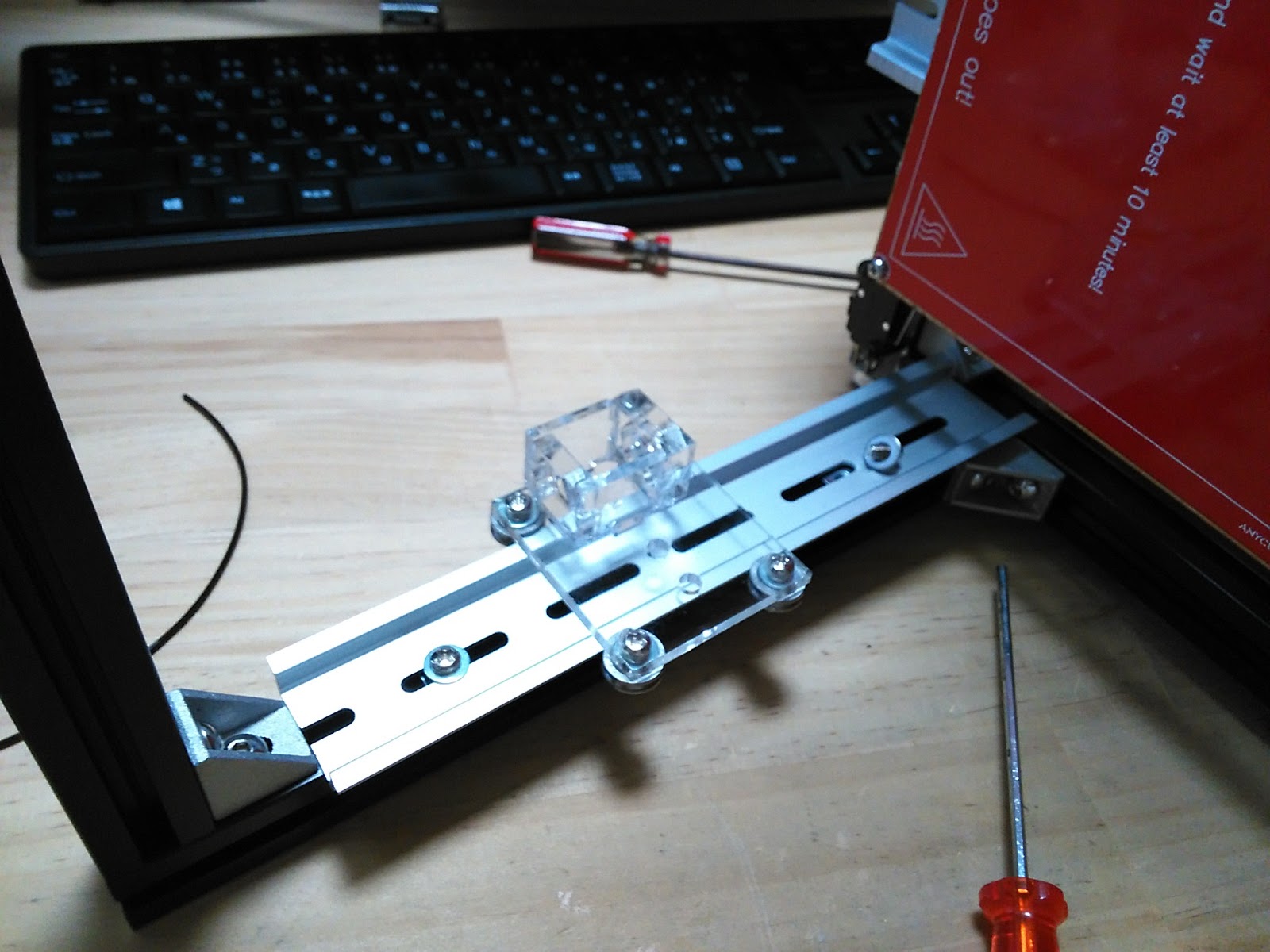
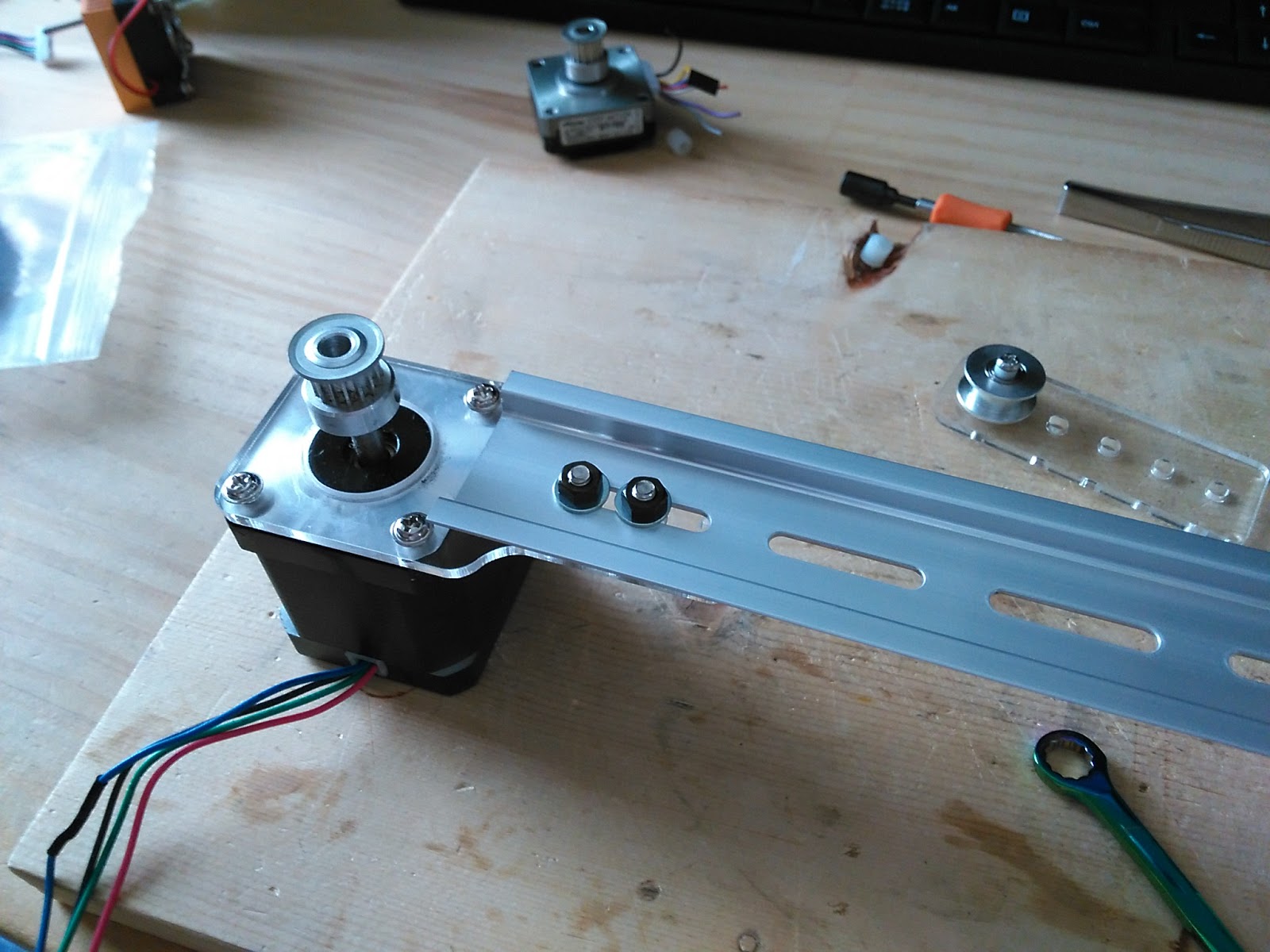
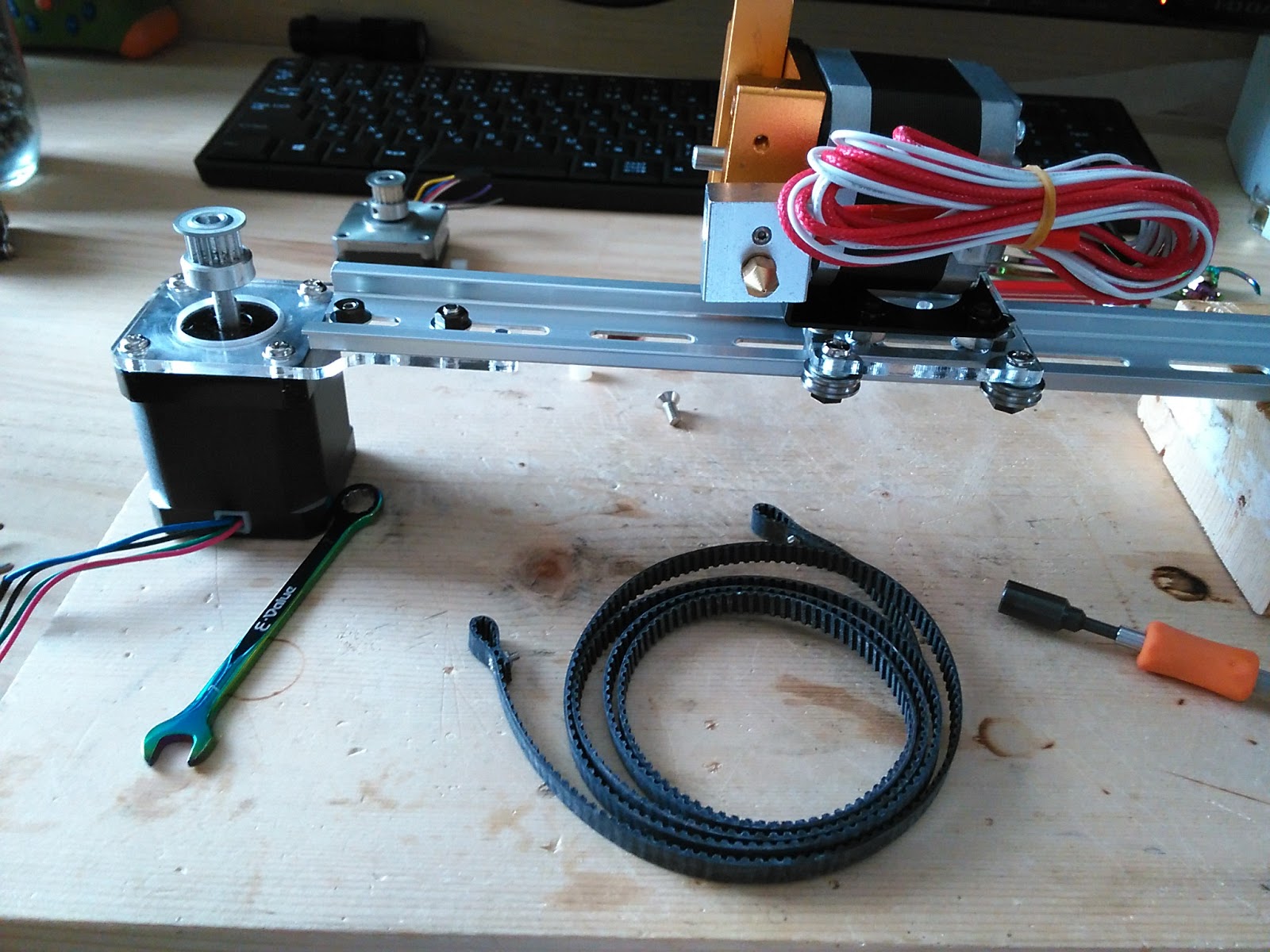
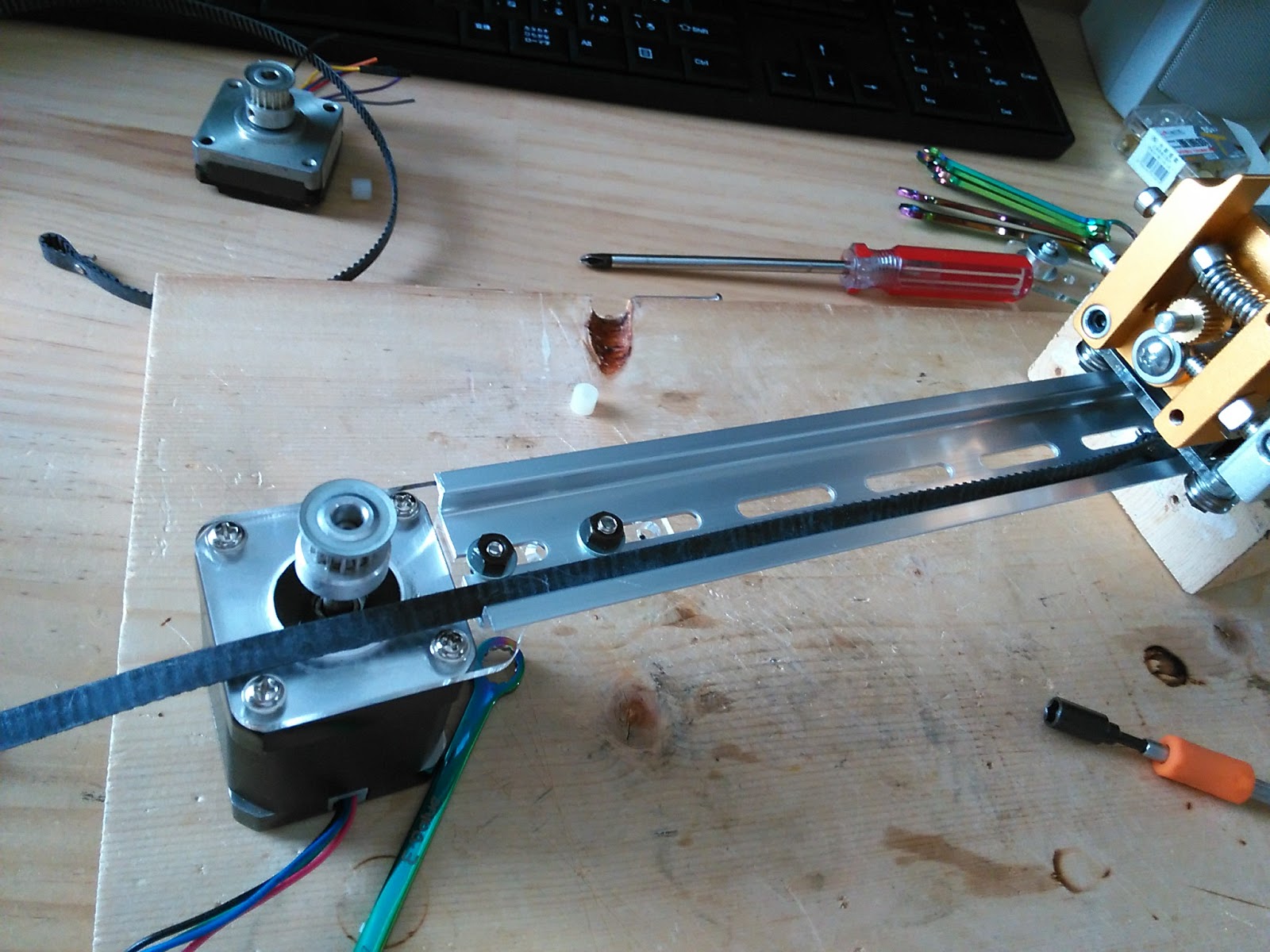
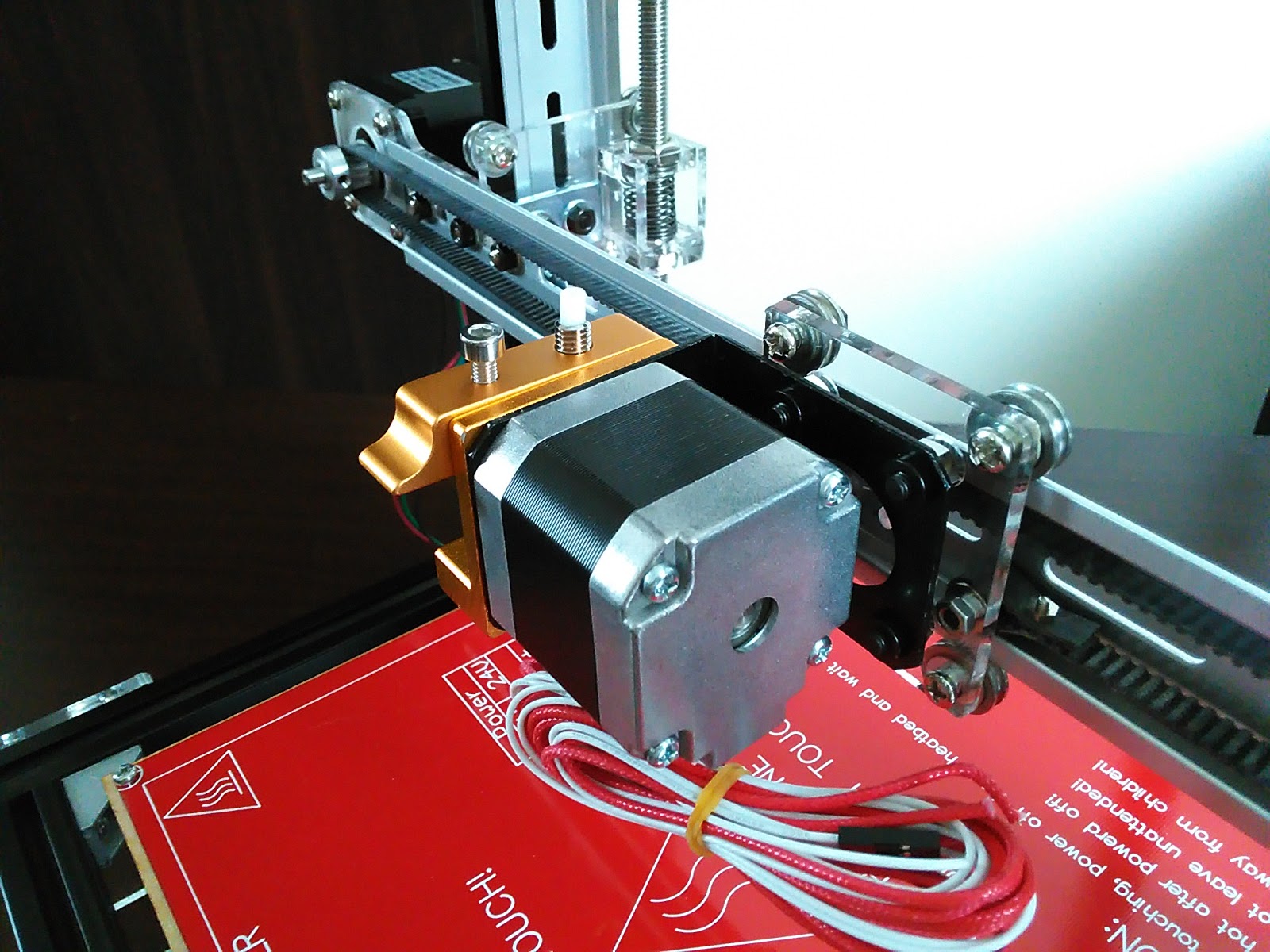
パーツはDINレールスライダー試作を作った時のものを使います。一端にモータを取り付けて。
ベルトをかけようとしてミスに気がつきました。ベルトのひっかけは中央ではなく端に寄せないといけませんでした。往復のベルトがあるので中央ではダメなのです。ついでに少しでもベルトが短くできるようにピンを縁ぎりぎりまで寄せました。
改めてスライドに通して、
ベルトを掛けていきます。
反対側にはプーリーを取り付け。
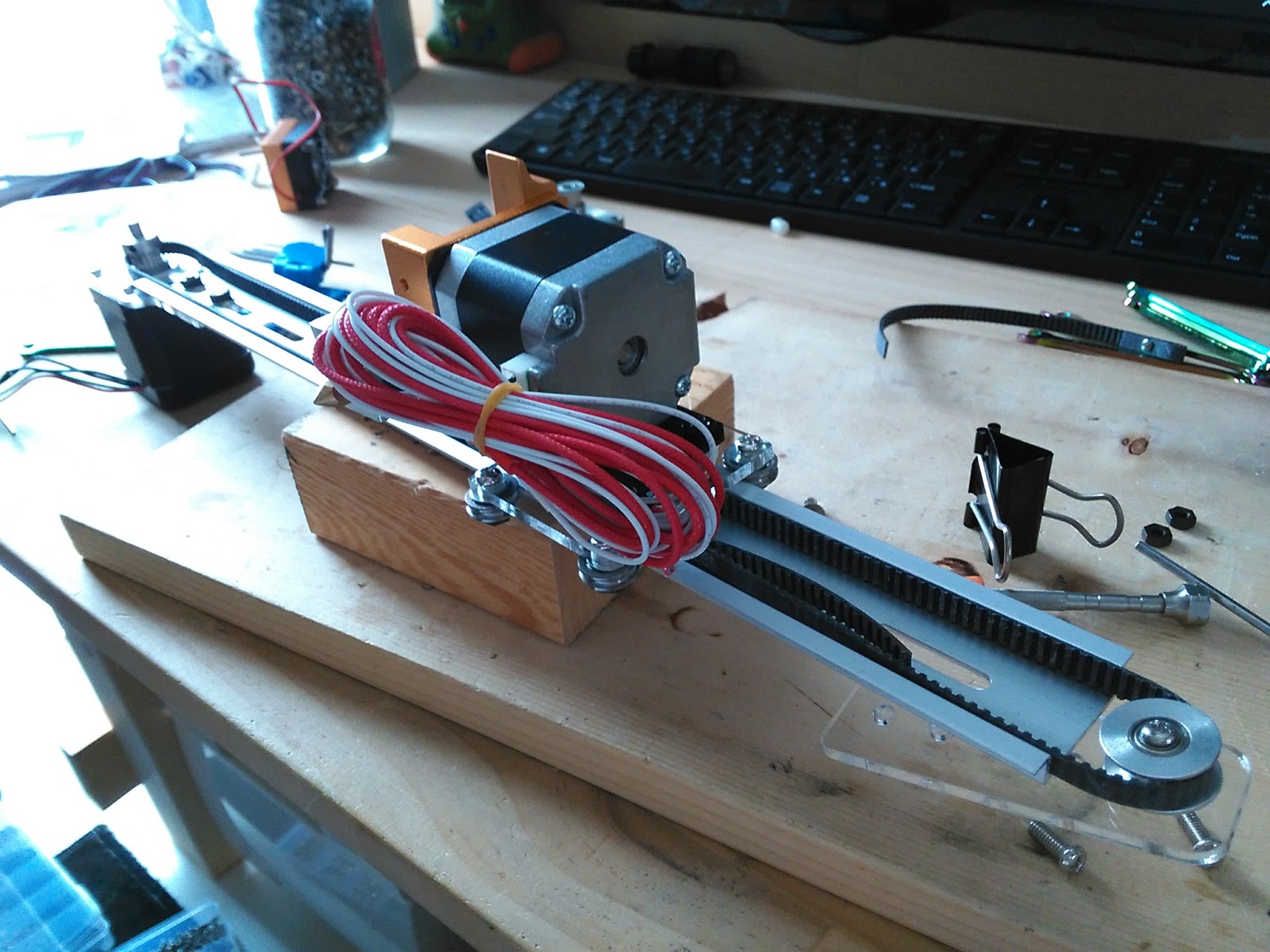
ベルトの他端をキャリッジ下のピンにかけてプーリーを動かしてベルトにテンションを描ければ出来上がり。
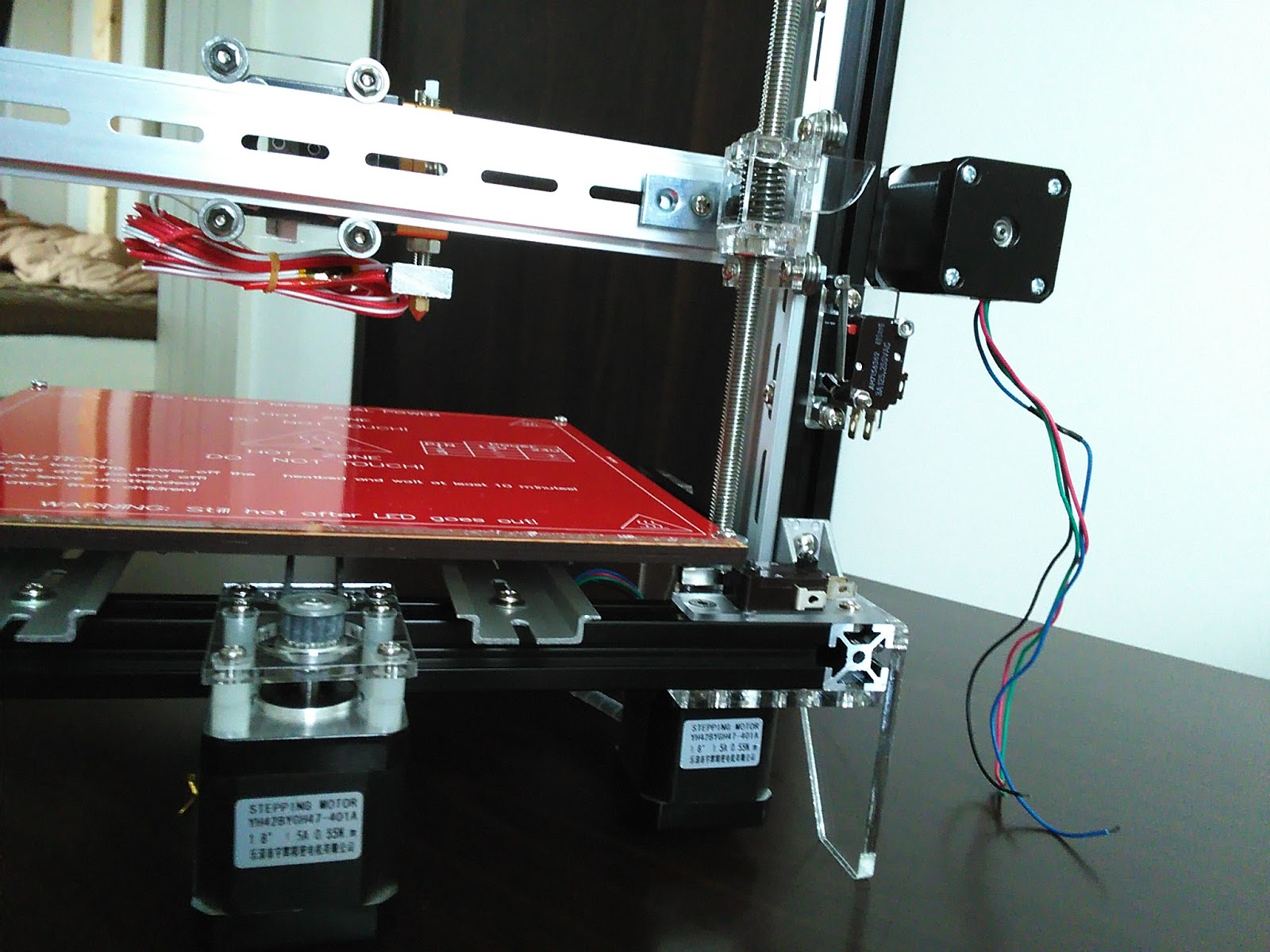
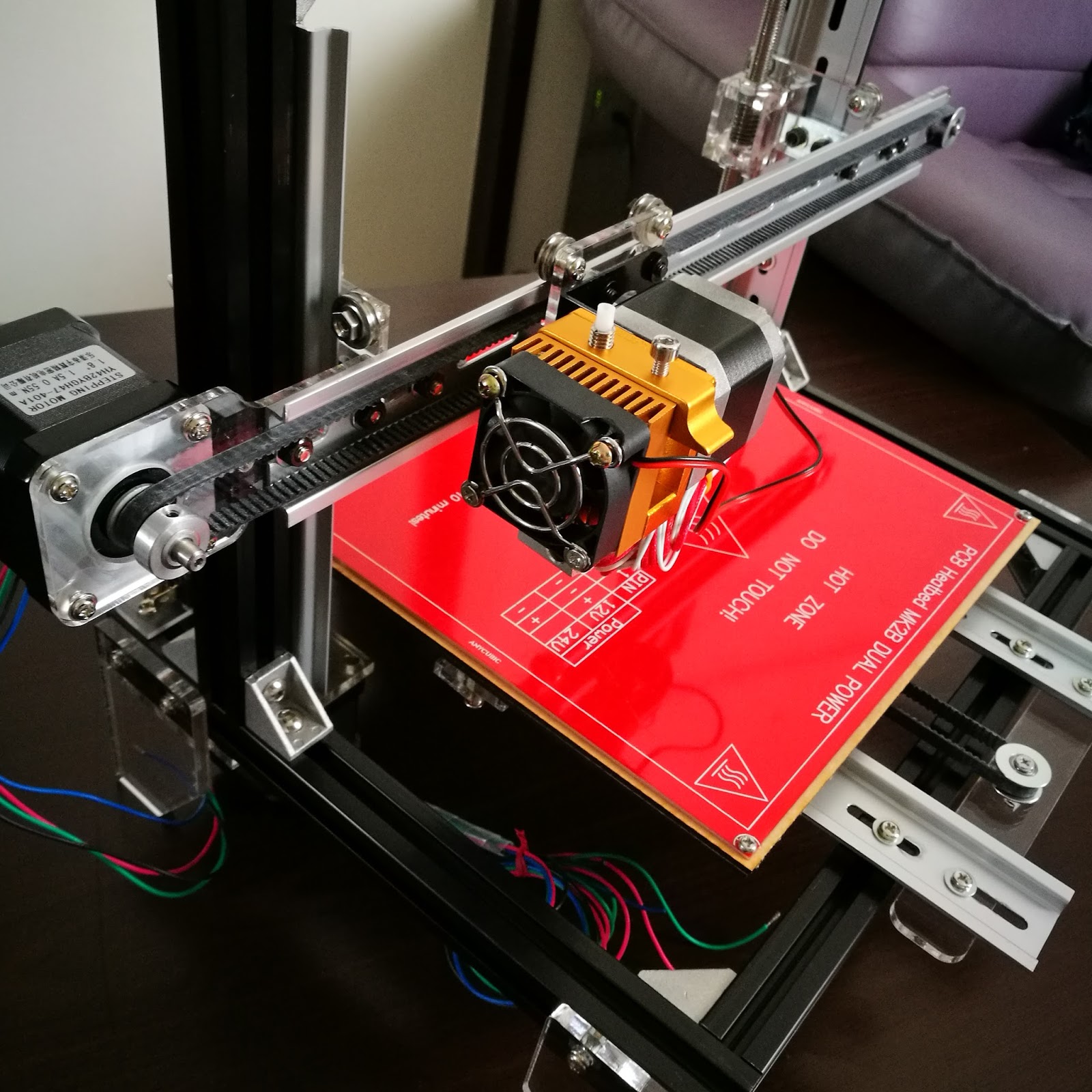
これだけで独立したスライダーとして動く状態です。いいですね。スリムです。

アルミのDINレールですが、重たいヘッドが片持ちでぶら下がってもしなっている感じはありません。とりあえずは行けそうであります。ここの剛性が今回の設計で一番不安があったところです。実際に動かしてみて剛性が足りない場合は、DINレールのバックアップにアルミフレームを入れるか、鉄製のDINレールを使うつもりでおります。

かっこいい。

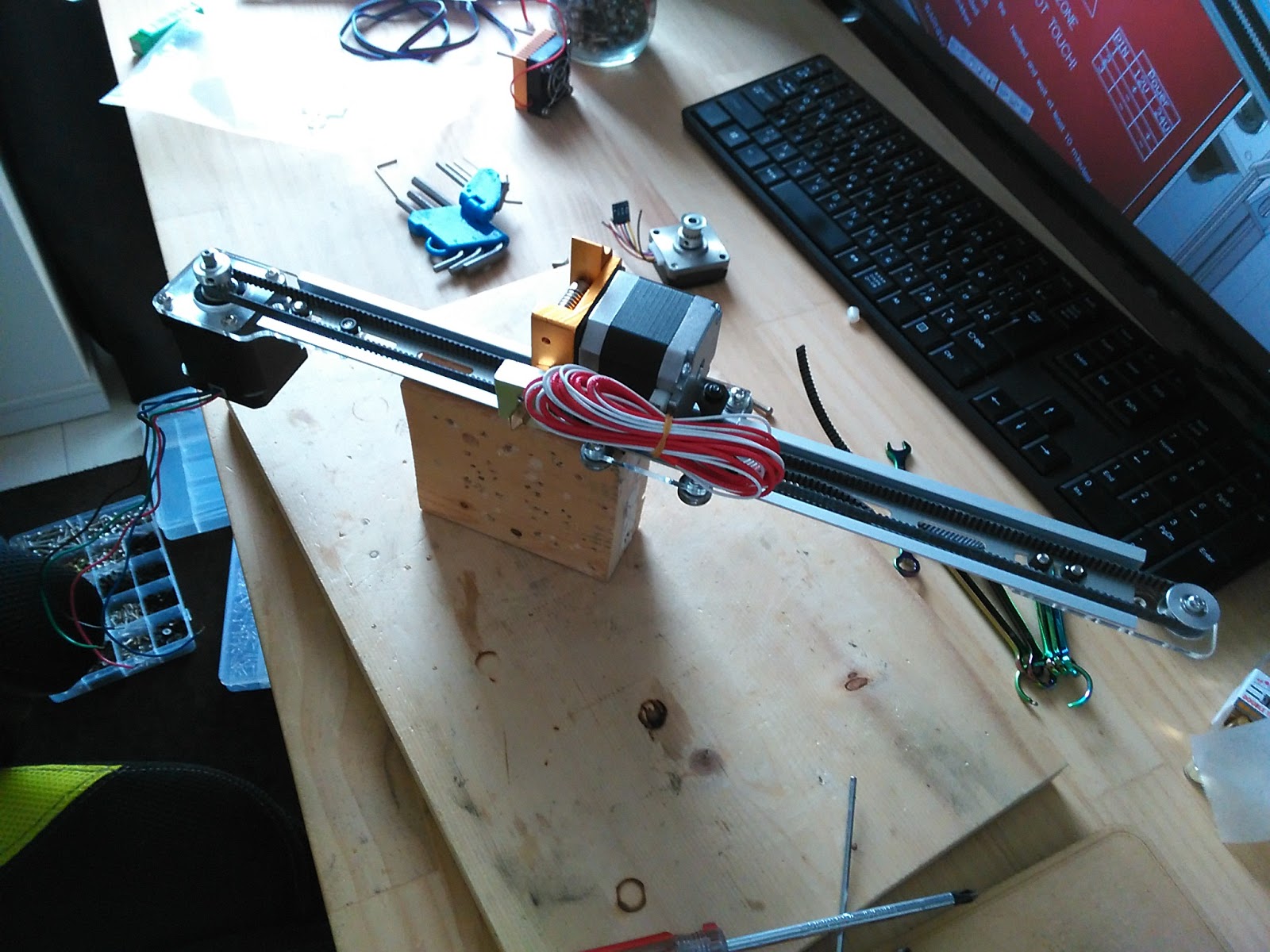
あとはこれをZ軸キャリッジに取り付けたL金具に固定するだけです。
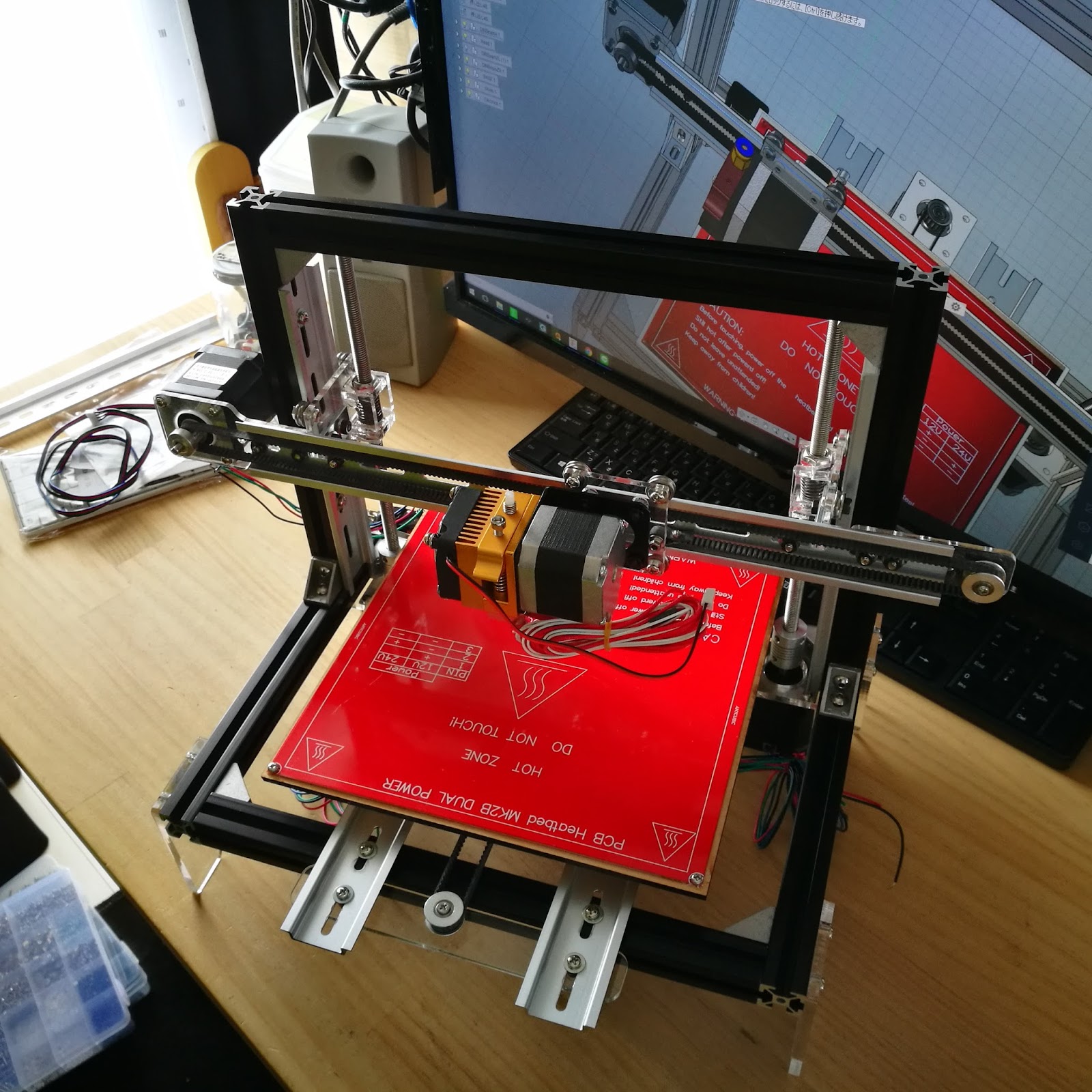
とりあえず仮止めして眺めてみることにします。
以下写真を何枚か。
いいですねえ。自画自賛です。
DINレールを使ったスライダーは実に良い感じで動いてくれます。
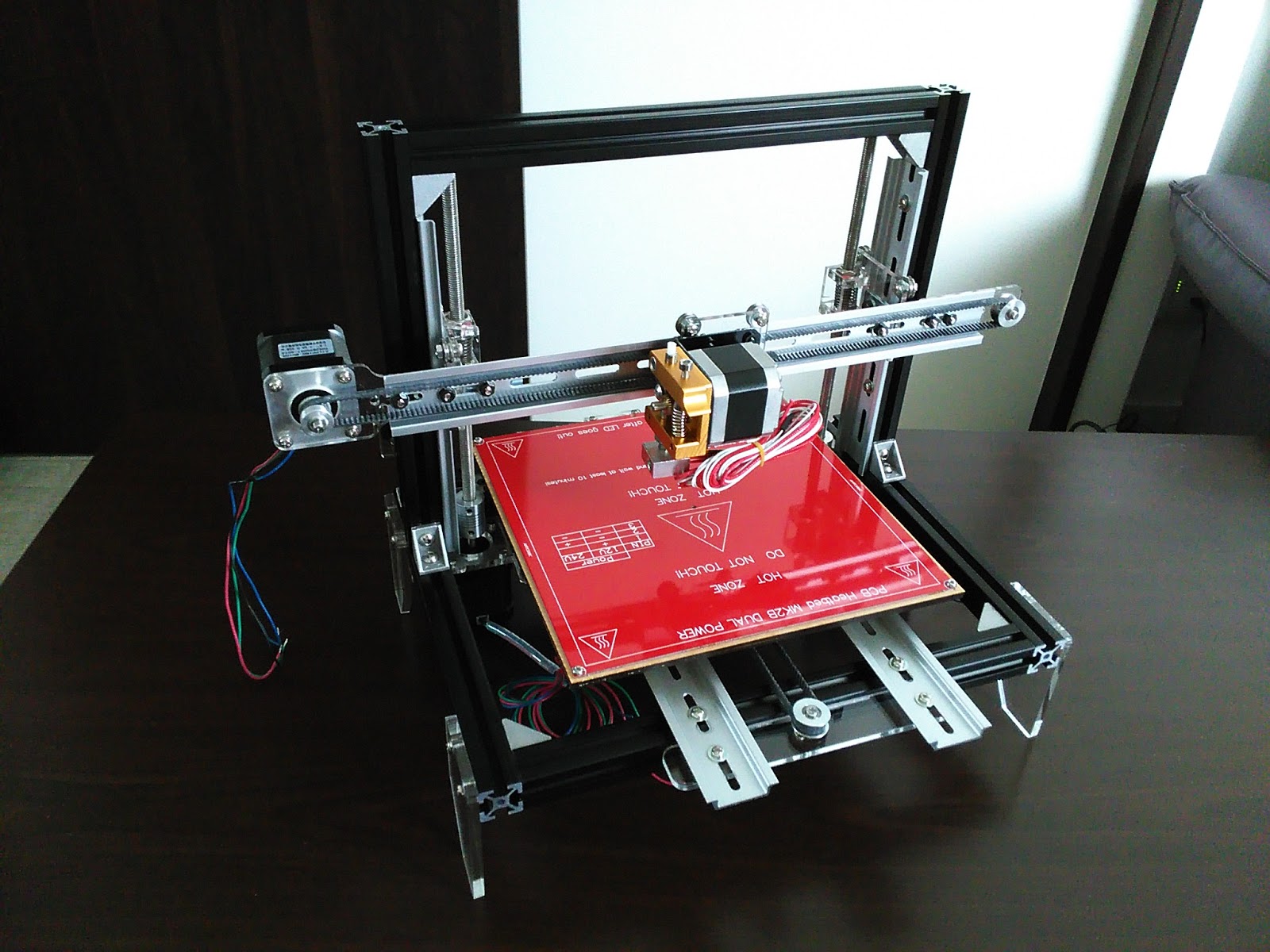
コーヒー淹れてしばし眺めることにしました。以下写真をもう少し。
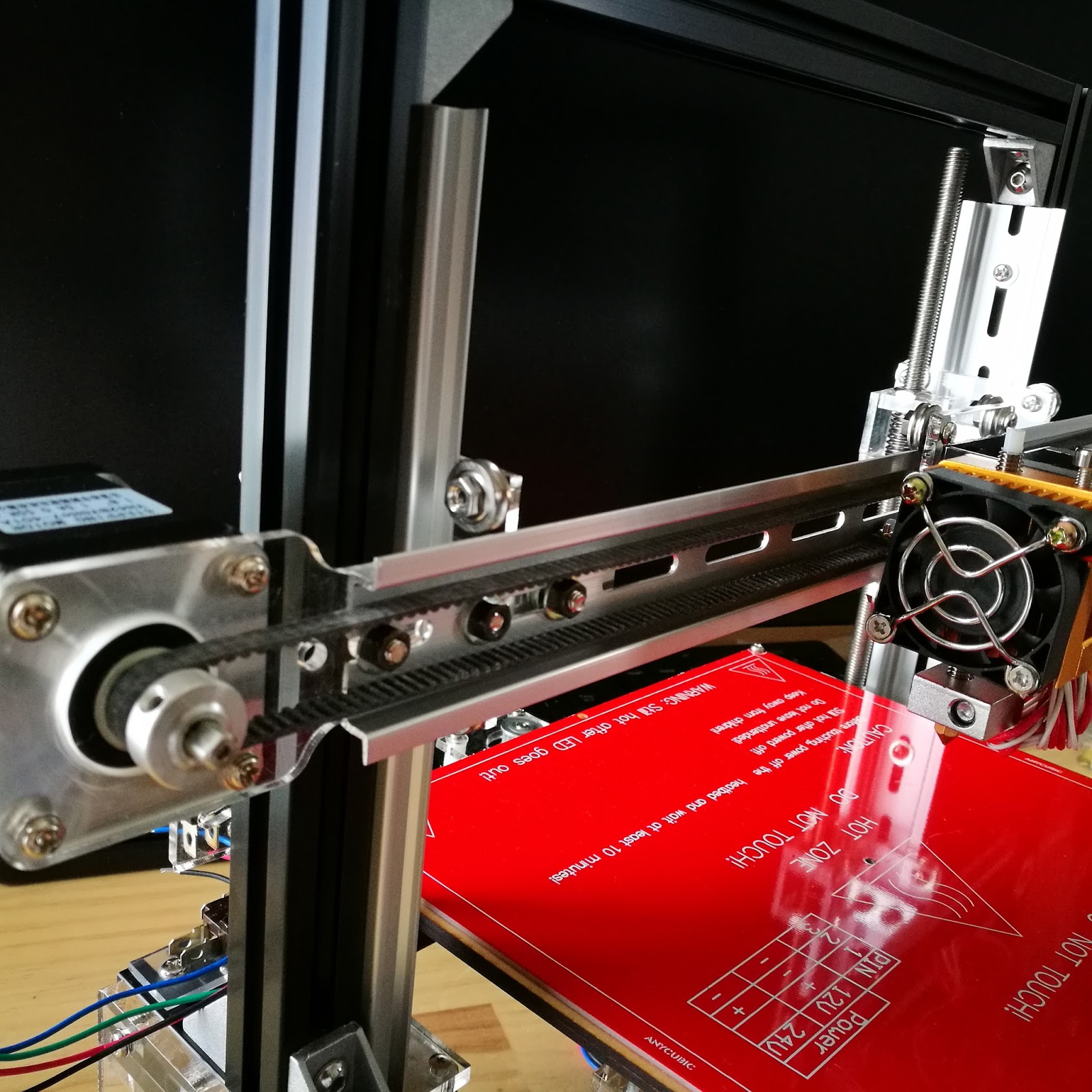
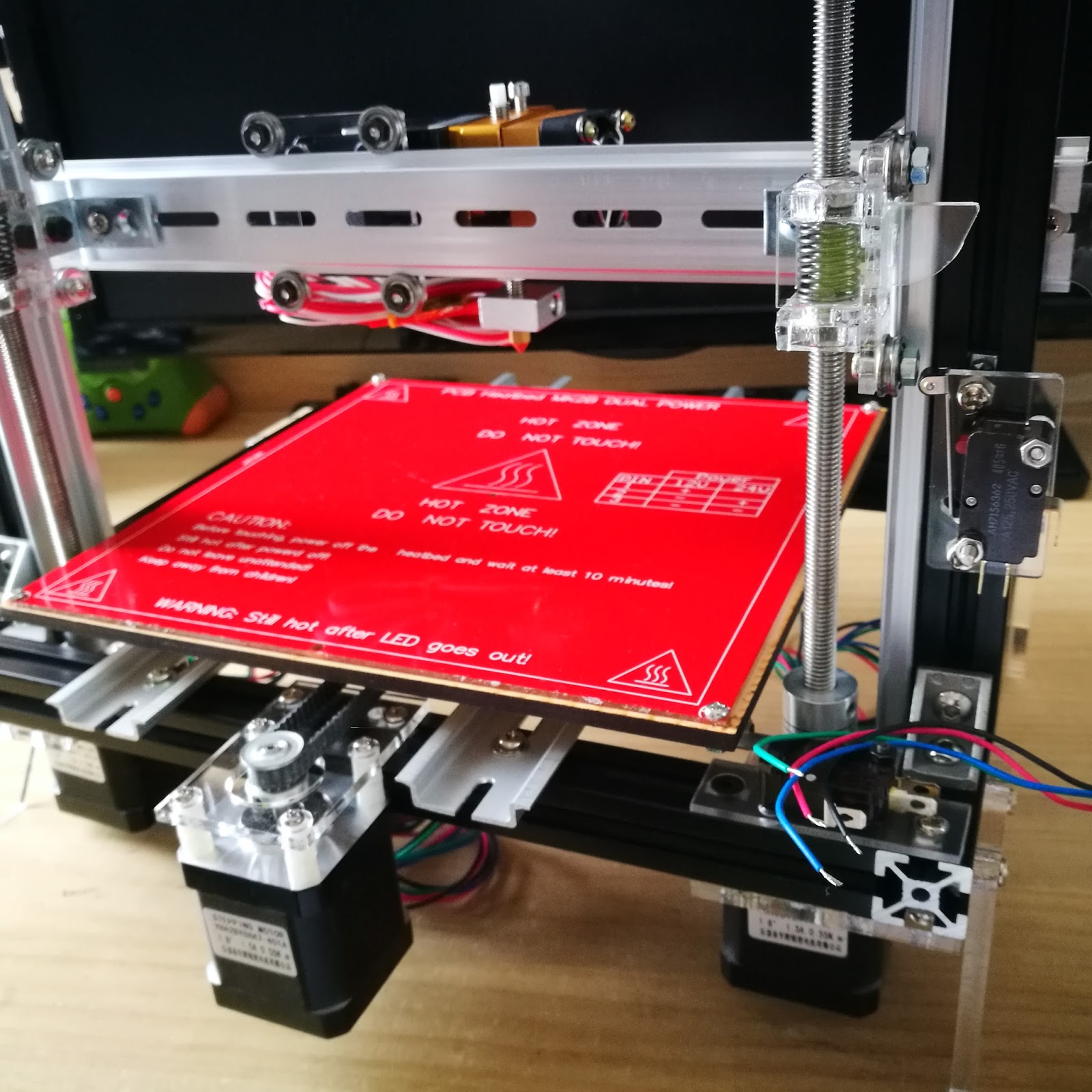
X軸は仮止めでリミットスイッチもつけておりませんが、まずこれでメカ部分は一段落というところと思います。早く動かしてみたいですね。
来週はまだ難しいかな。頑張って夏休みにはテストプリントができるように持っていきたいと思います。