
fusion360の使い方、というかいわゆるちゃんとした3D CADのお作法がだいぶんわかってきました。やっぱ実践と学習の繰り返しは上達効果絶大ですね。しばらくあーだこーだやった後本読んだりネット見たりすると「そういうことだったのかああああああ!!!」という感じで体の奥底に知識が刻み込まれます。さらっと読んだだけではダメなのであります。
さて、前回適当にフレームを選んだためにベルトが残念なことになっておりました。
で、次に作るのはちゃんと図面仕上げてからと思っていたのですが、やっぱ動かしたいですよね。
ということで、また作ってしまいました。0.1次試作です。
ベルトの問題はフレームを替えれば何とかなるはずですので、それは現物で対応するとして、まだ図面化していないリミットスイッチを描くことにしました。
リミットスイッチは原点出しをするために各軸に必要です。
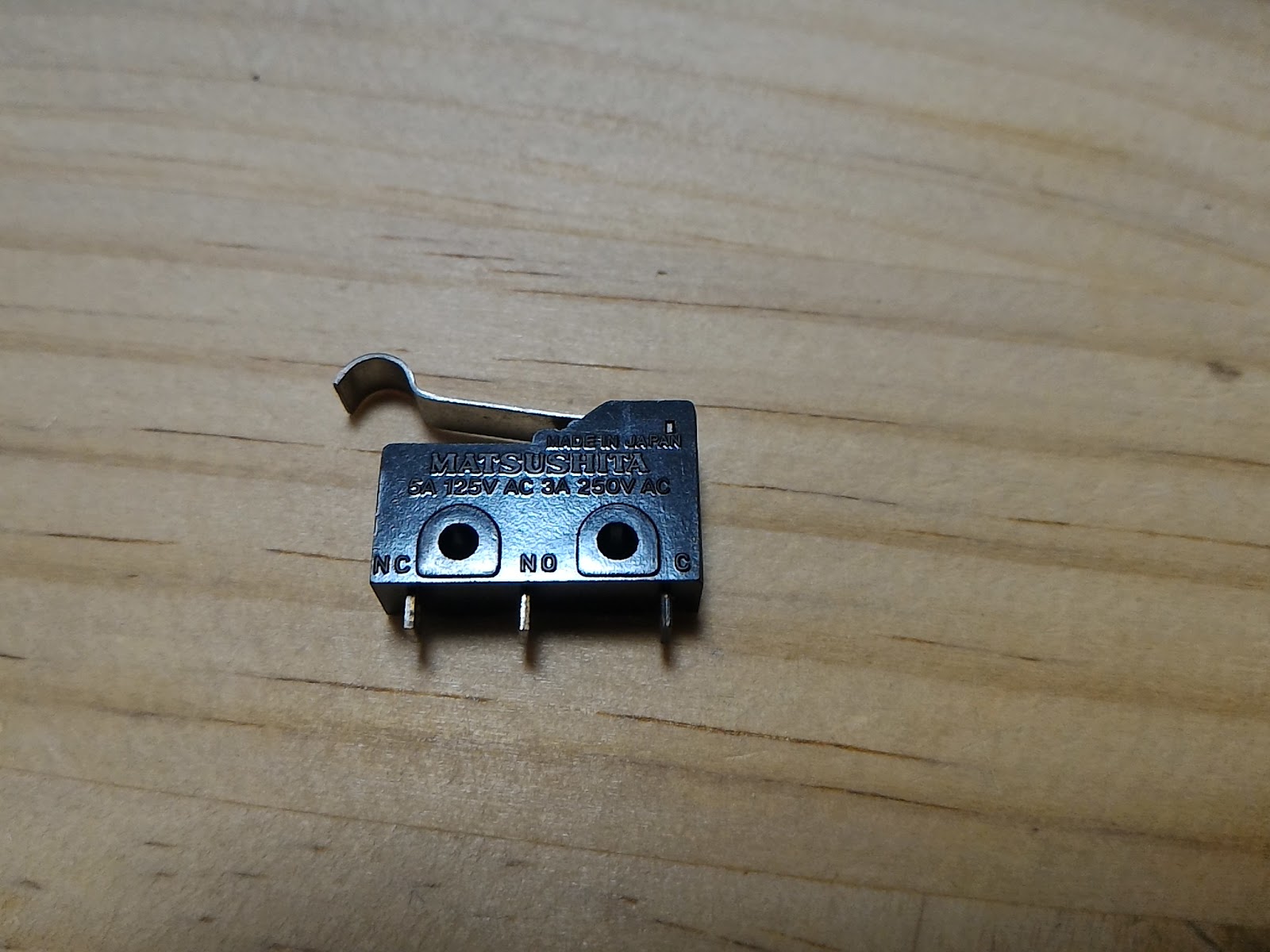
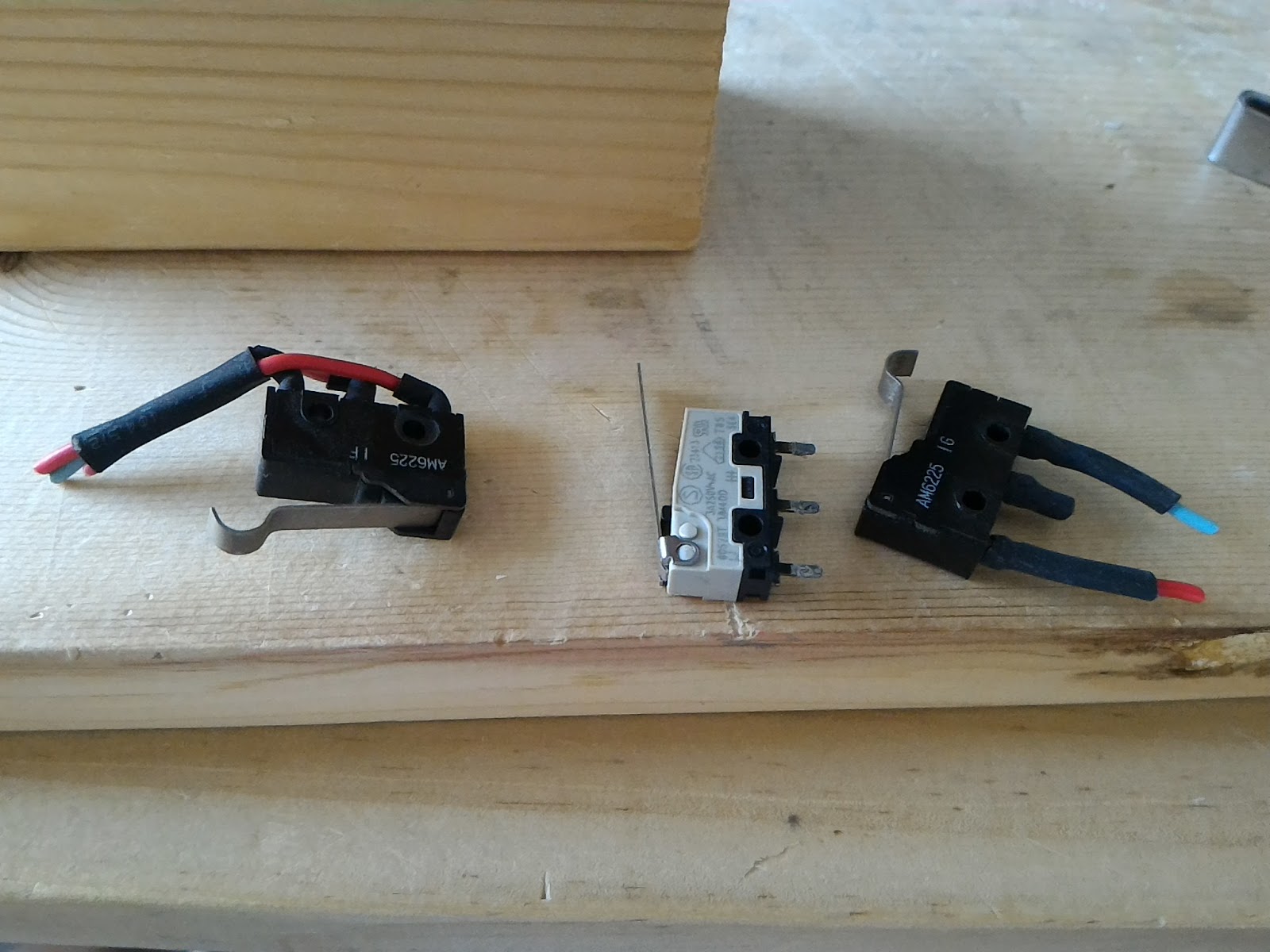
ふつう使われるのはこんなマイクロスイッチですね。フォトインタラプタという手もあります。
いずれにしてもこれら電子部品は今やRSコンポーネンツのHPから3D CADの図面を入手することができます。素晴らしいです。

fusion360にインポートするにはSTEPがいいでしょう。ZIPをDLし、展開して出てきたstepファイルをクラウドに放り投げます。
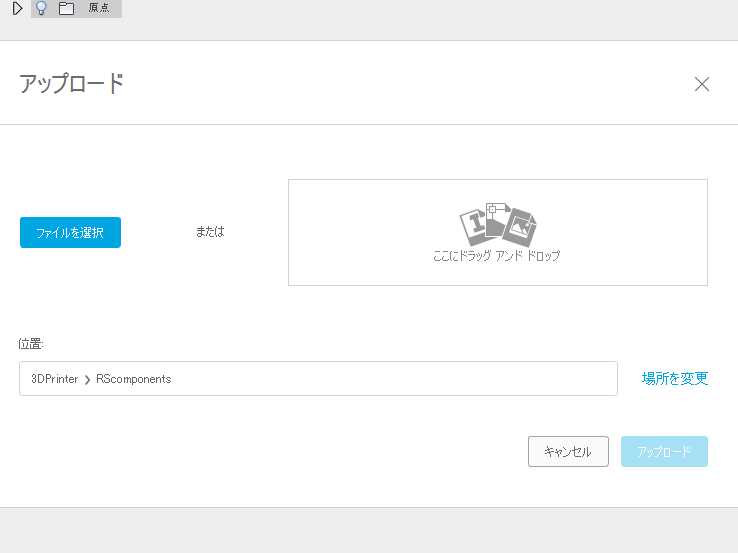
すると、勝手に変換されてfusion360で使える形式になります。
フォトインタラプタも考えてみたのですが、フォトインタラプタを使うと部品点数が多くなることに気がつきました。
同じことをやるのならシンプルな方を選ぶのは設計の基本と考えております。
ということでフォトインタラプタはやめてマイクロスイッチを採用します。
形状を変更した板はオフセット構築面にスケッチを投影し、そのスケッチをdxfとして出力します。
この辺りの作業にはだいぶ慣れてきました。

ではPC上の作業から現物を使った作業に移ります。
まず部品の確保。
マイクロスイッチはたしかジャンク部品箱の中にいくつか入っていたと記憶しています。

レバー付きのやつはあんまりないですね。まあいいでしょう。
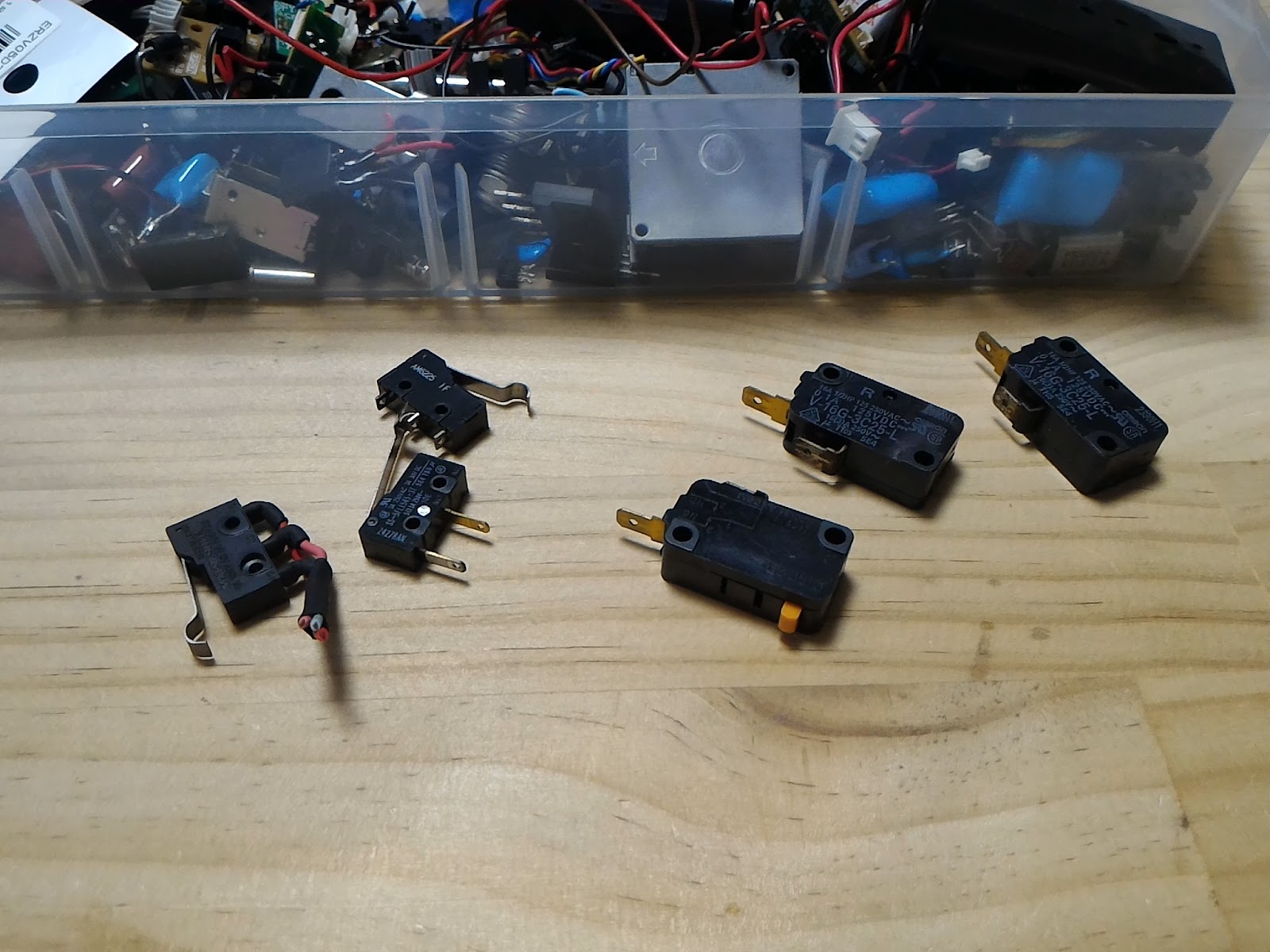
この辺りを使うかな。
フォトインタラプタの方は山ほどありました。

ありとあらゆる形状があります。何があっても対応できそうであります(笑

フレームの種類を変更しますので、一部のパーツをプリントしなおします。
今日も快調な3Dプリンタさん。
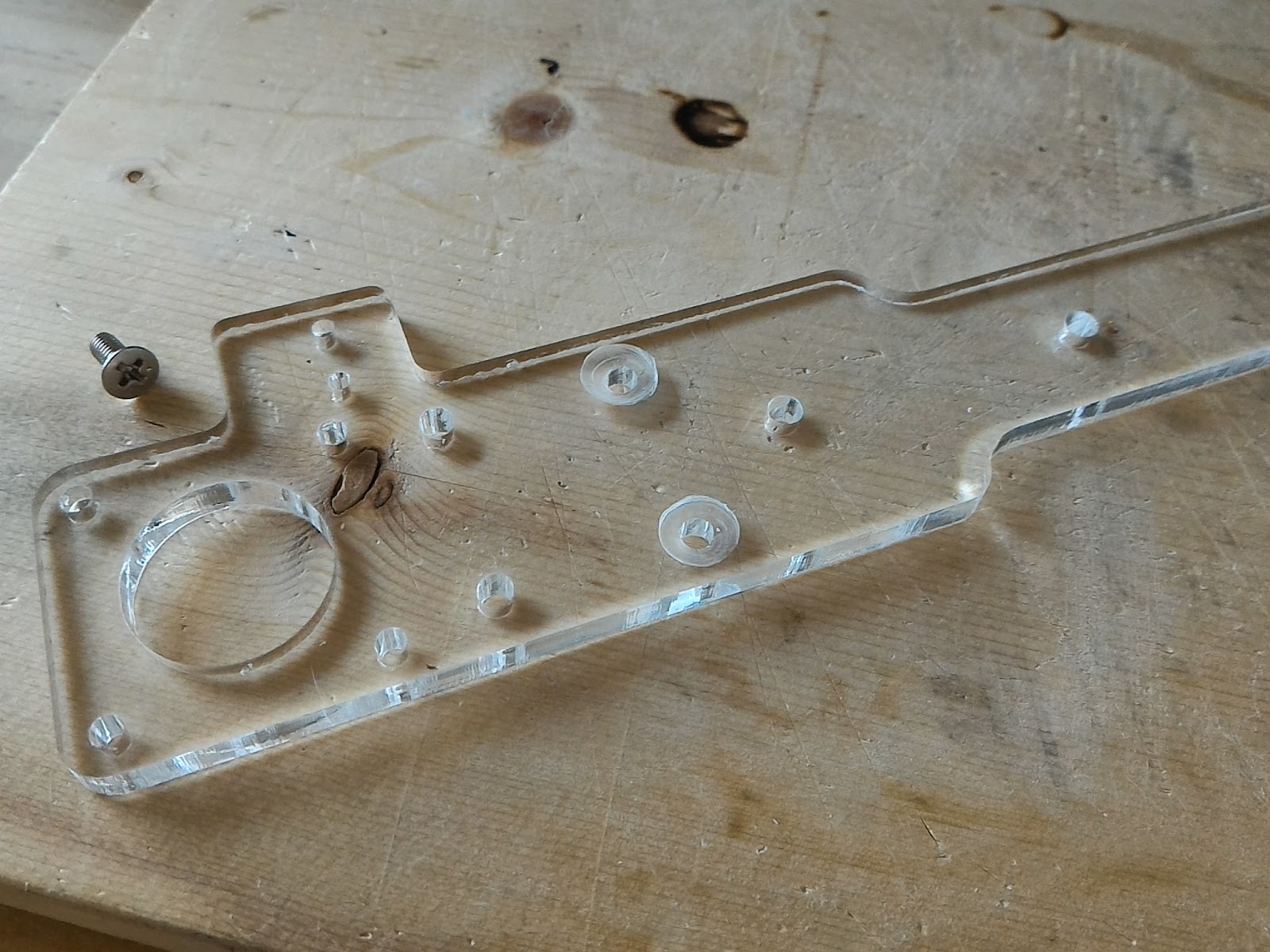
ではアクリル板のカットをします。山ほどある端材の中から5mmtの適当な奴を一枚持ってきて、
こちらもここのところノントラブルで働き続けるレーザ加工機にセットします。
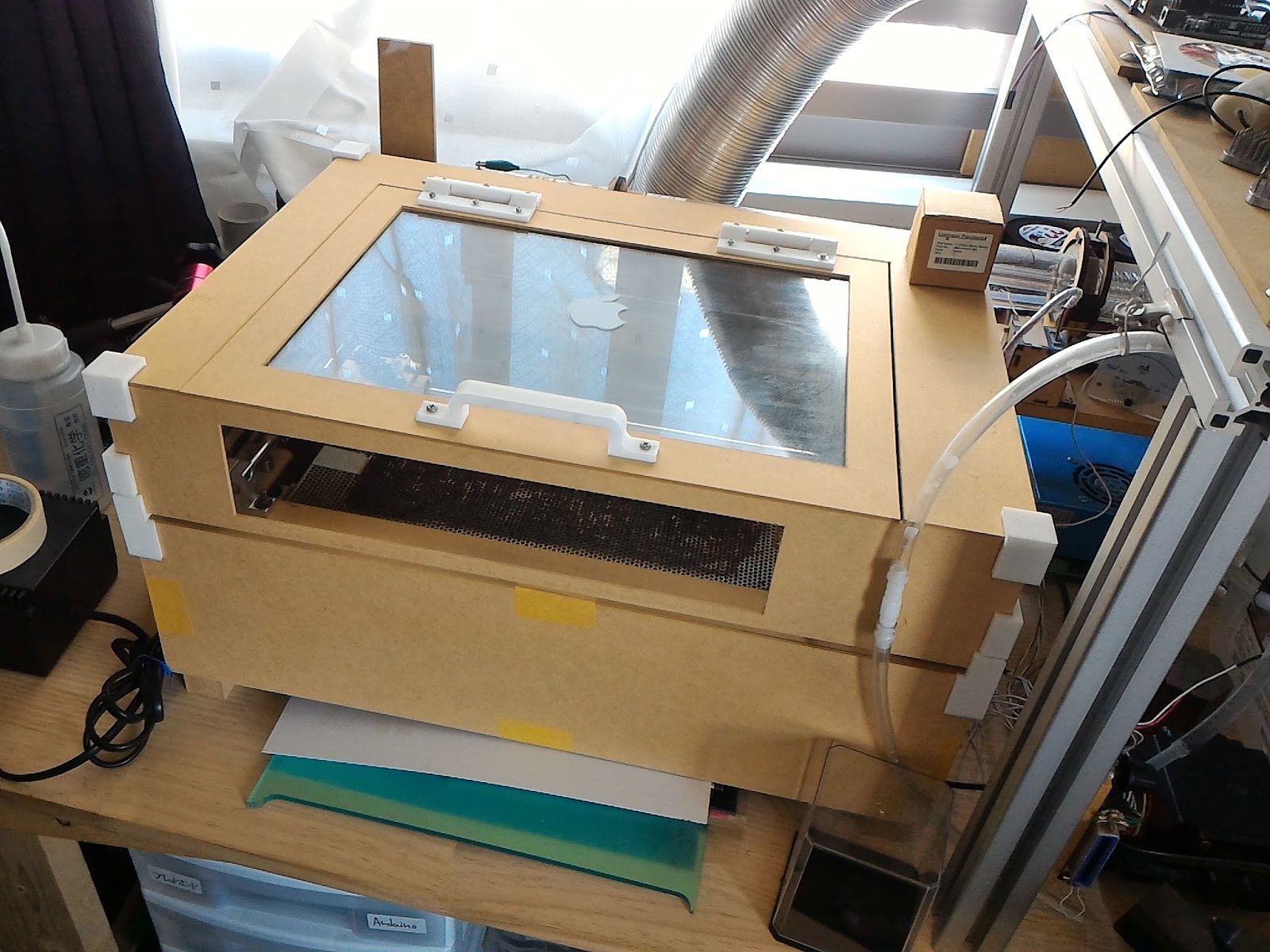
切ります。動画で。
切れました。取り出しも動画で。
切りしろが小さいので形状が複雑になると片手では抜けなくなります。
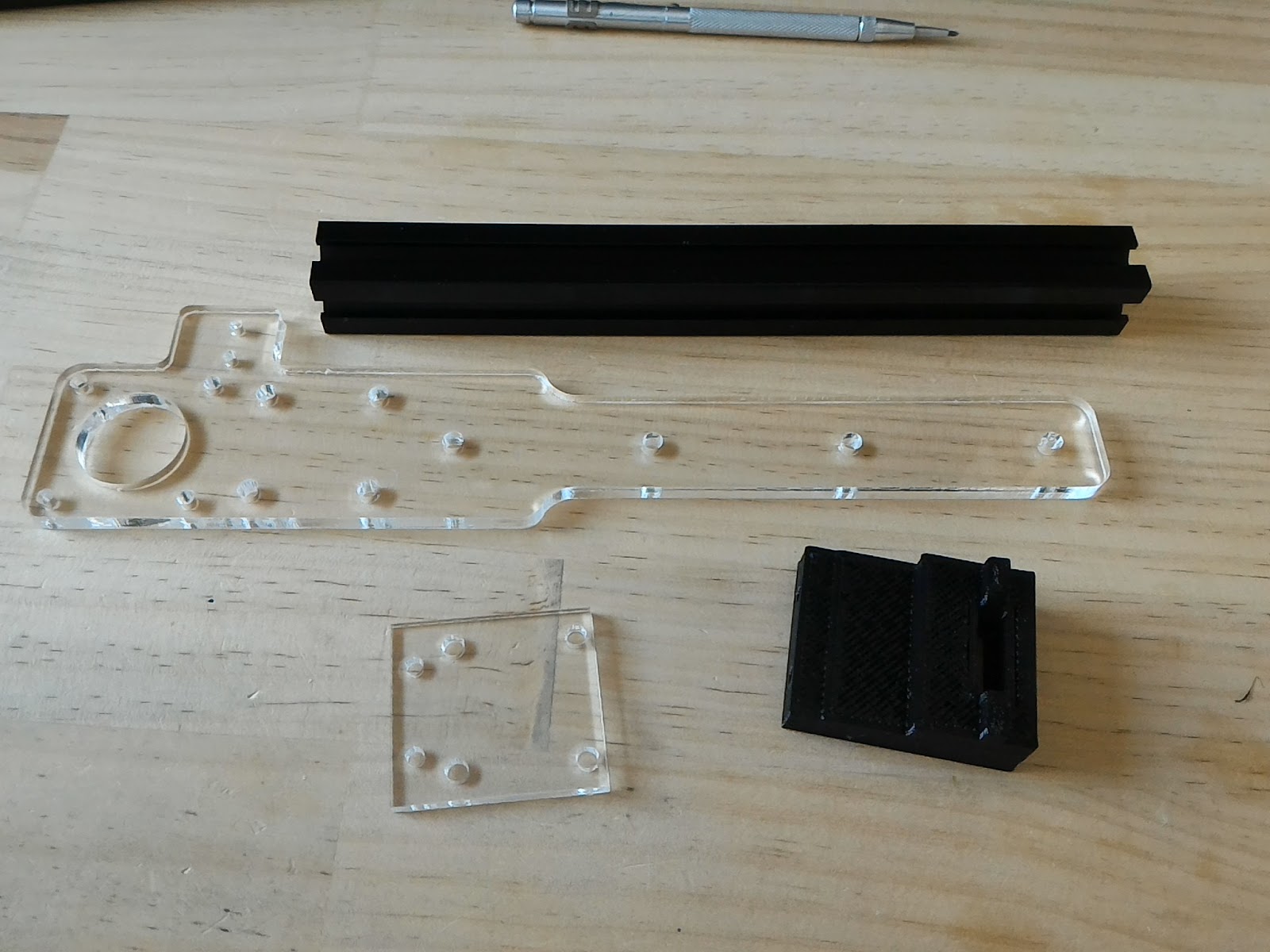
きれいに切れました。
この切りくずを捨てるのが毎度もったいないと思うのですが、使い道を全く思いつきません。

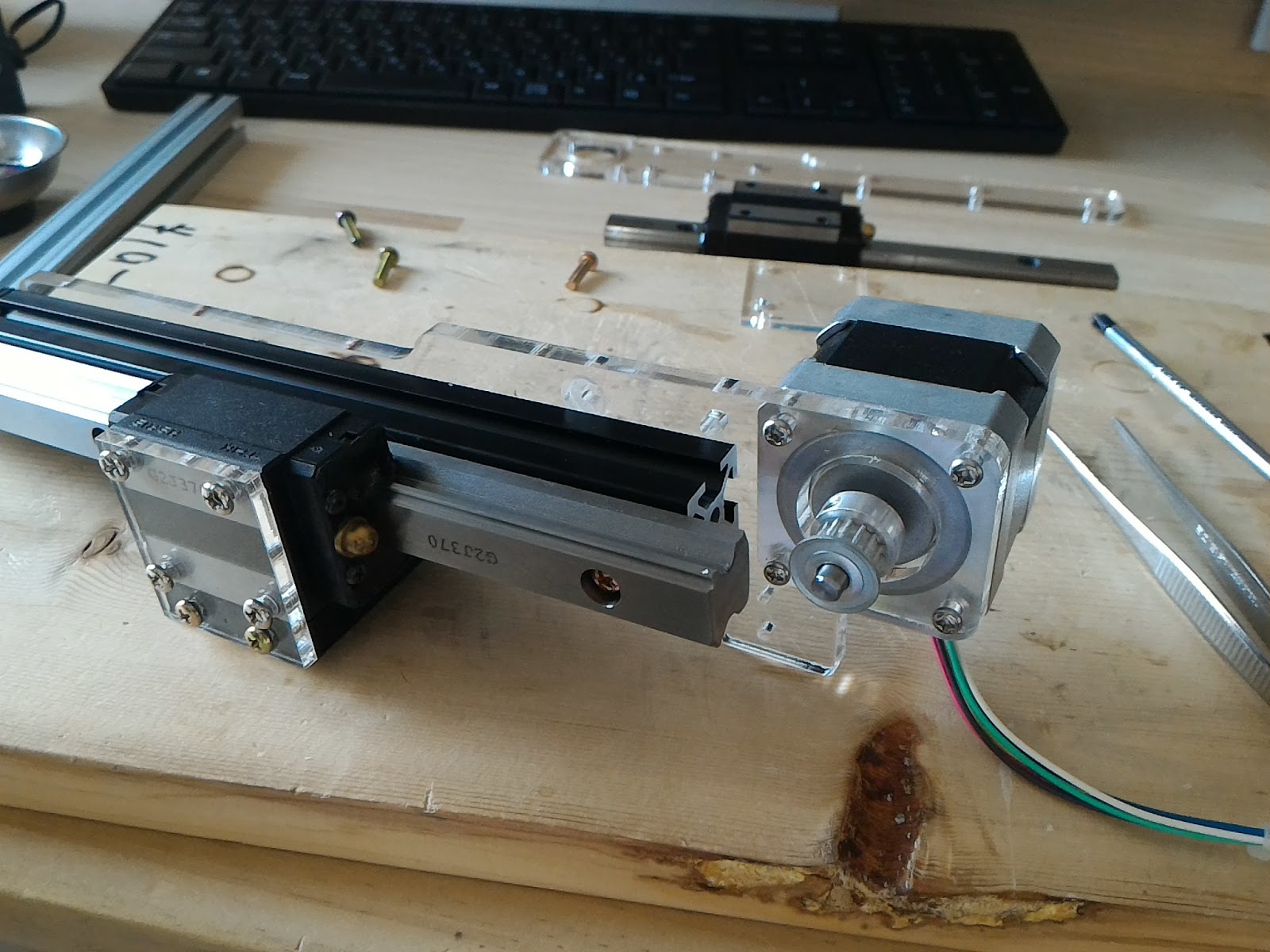
これで材料がそろいました。
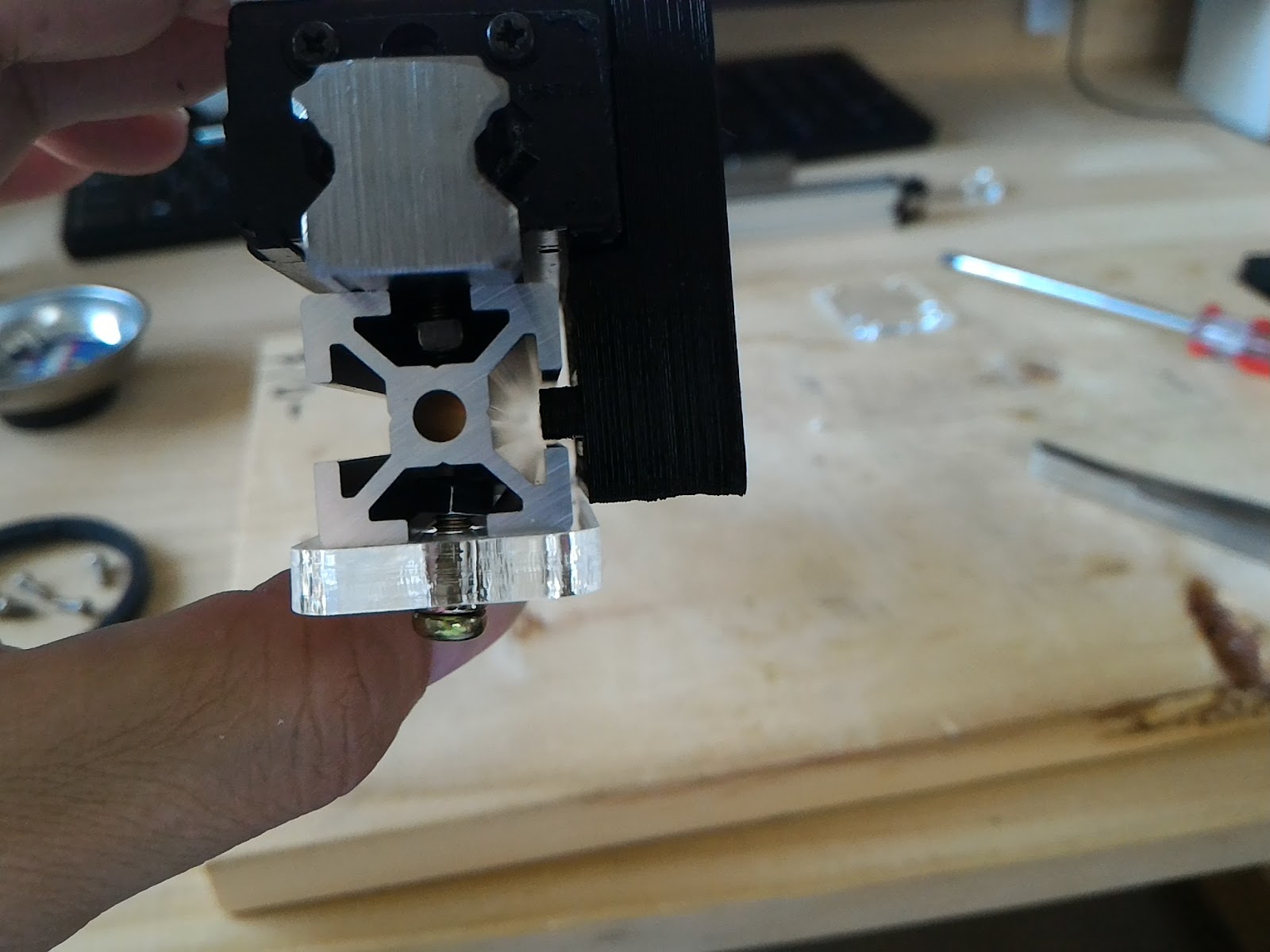
今回はちゃんとベルト幅よりも広い溝を持つフレームを使います。
このフレームは溝幅はOKなのですが、長さがリニアガイドよりも短いので前回使わなかったのです。
0次試作品をばらします。
Z軸の取り付けは皿ネジを使います。ナベやトラスではスライドが動いたときにネジ頭が干渉するのです。ということで、ザグリの具合を確認するためにZ軸に使用予定の180mmのリニアガイドを取り出してきます。

ヘッドが二つ余ります。どうしましょうかねこれ。

ザグリ穴を適当に作って、
Z軸に取り付けて出っ張りがないことを確認します。
まあ、問題ないですが、偏芯してて汚いです。センタードリル買わないといけないですね。
ということで、X軸本体の改造に取り掛かります。
フレームがリニアガイドよりも短いので一抹の不安があります。
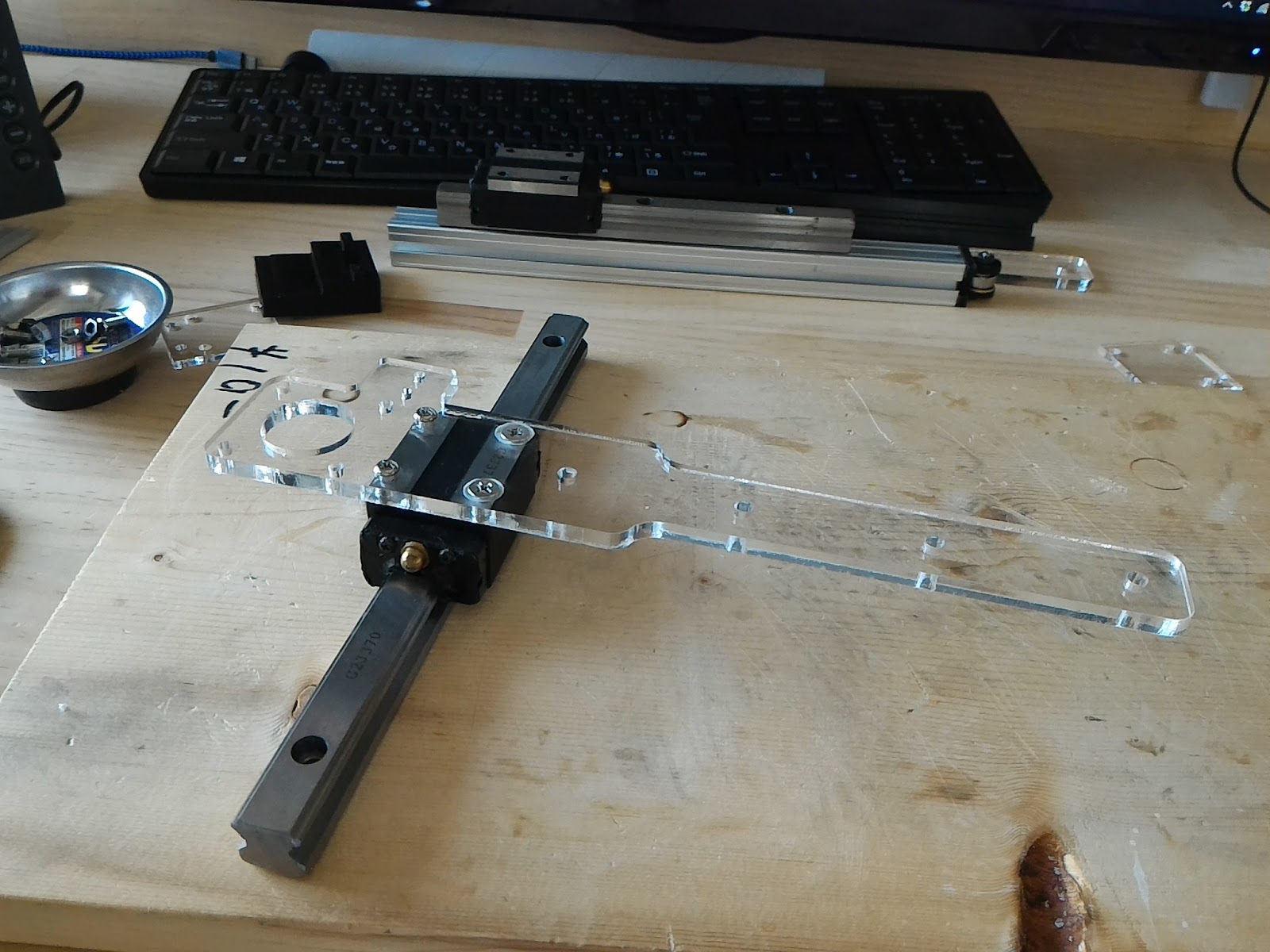
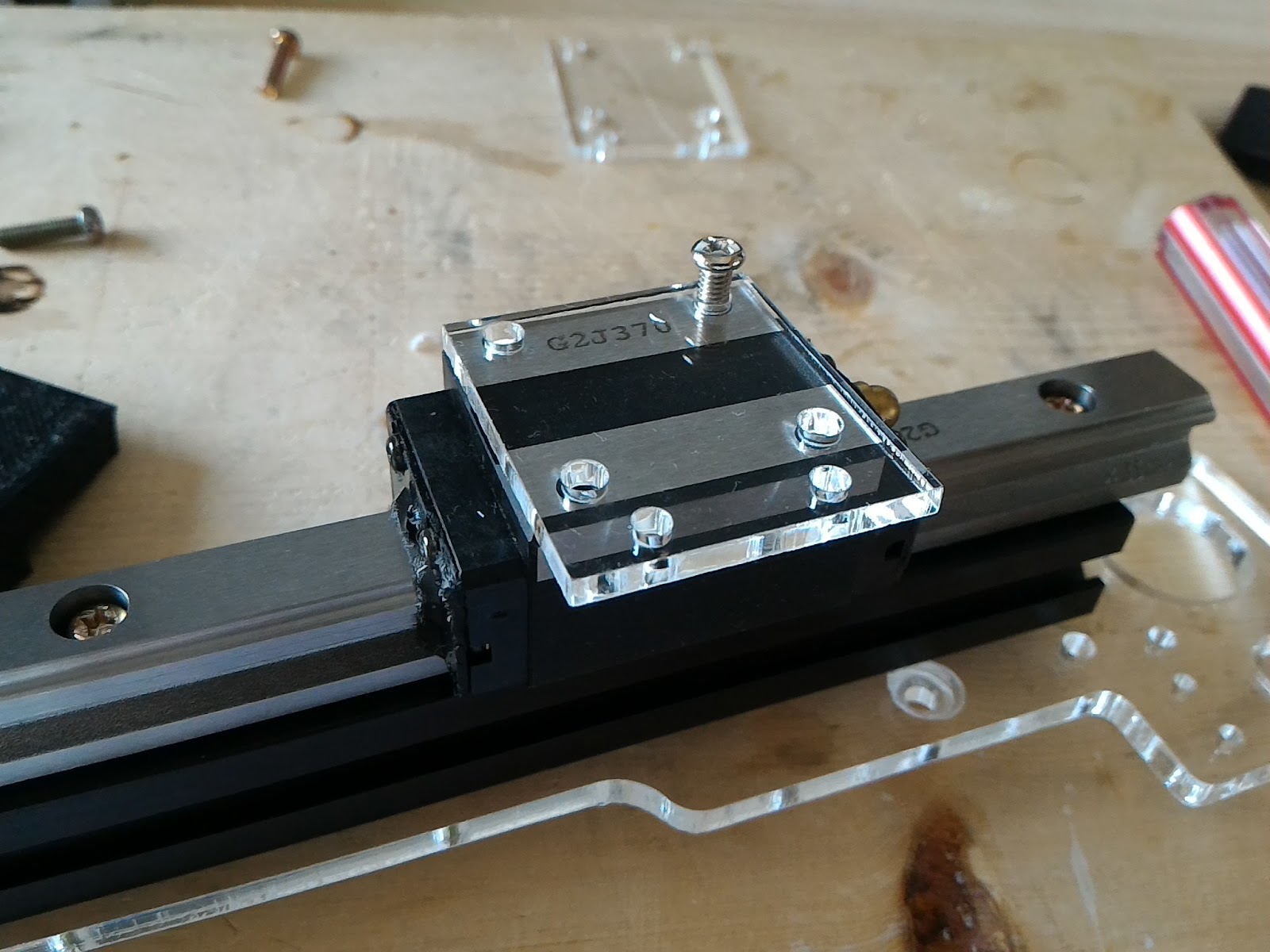
とりあえずリニアガイドをフレームに固定し、
そのAssyをアクリル板にさらに固定します。まだフレーム用のナットも買ってないのでその辺の六角ナットを無理やり使っています。

キャリッジ用のプレートを取り付けて、
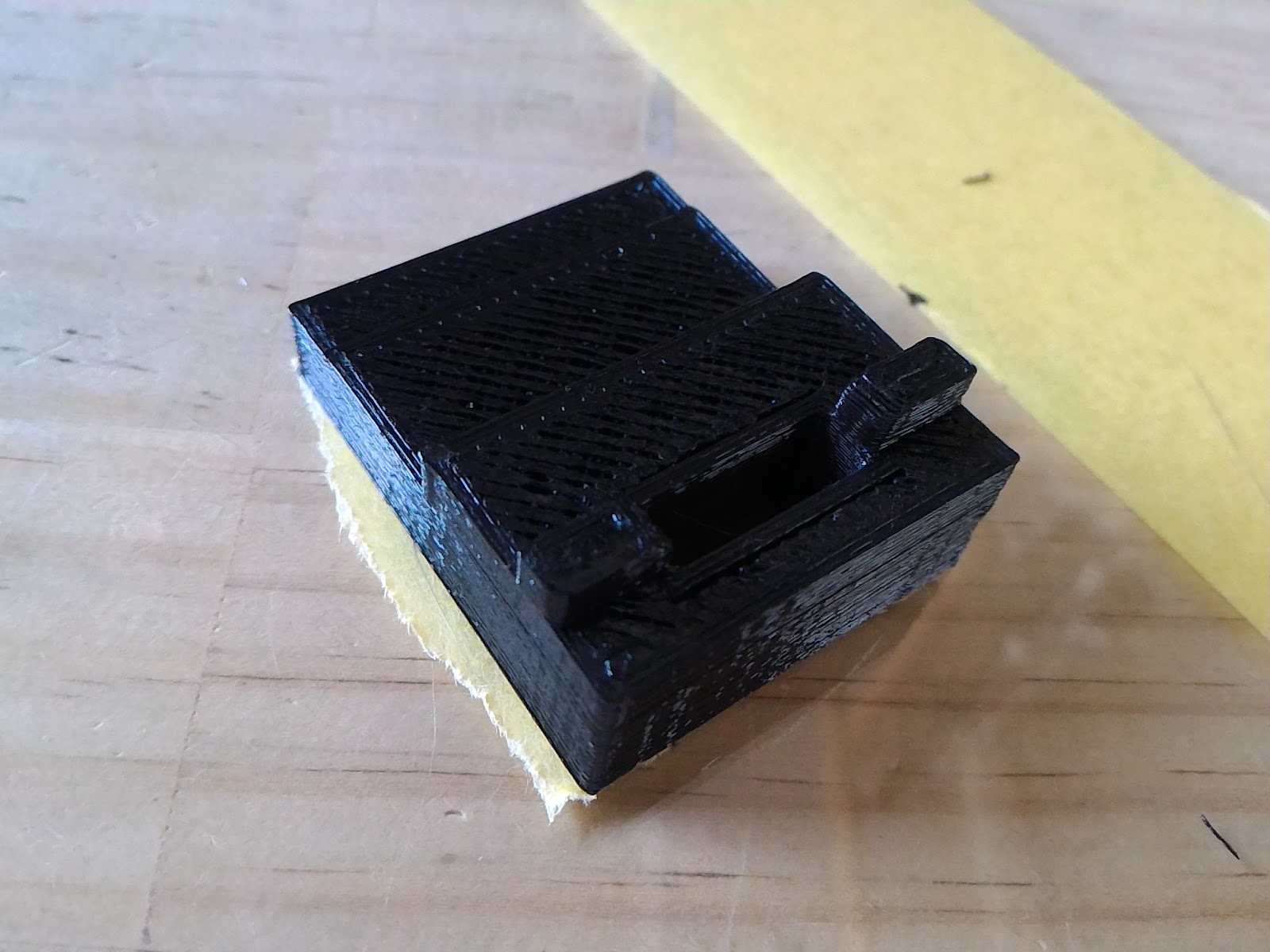
新しくプリントしなおしたキャリッジとベルトを繋ぐパーツを取り付けます。
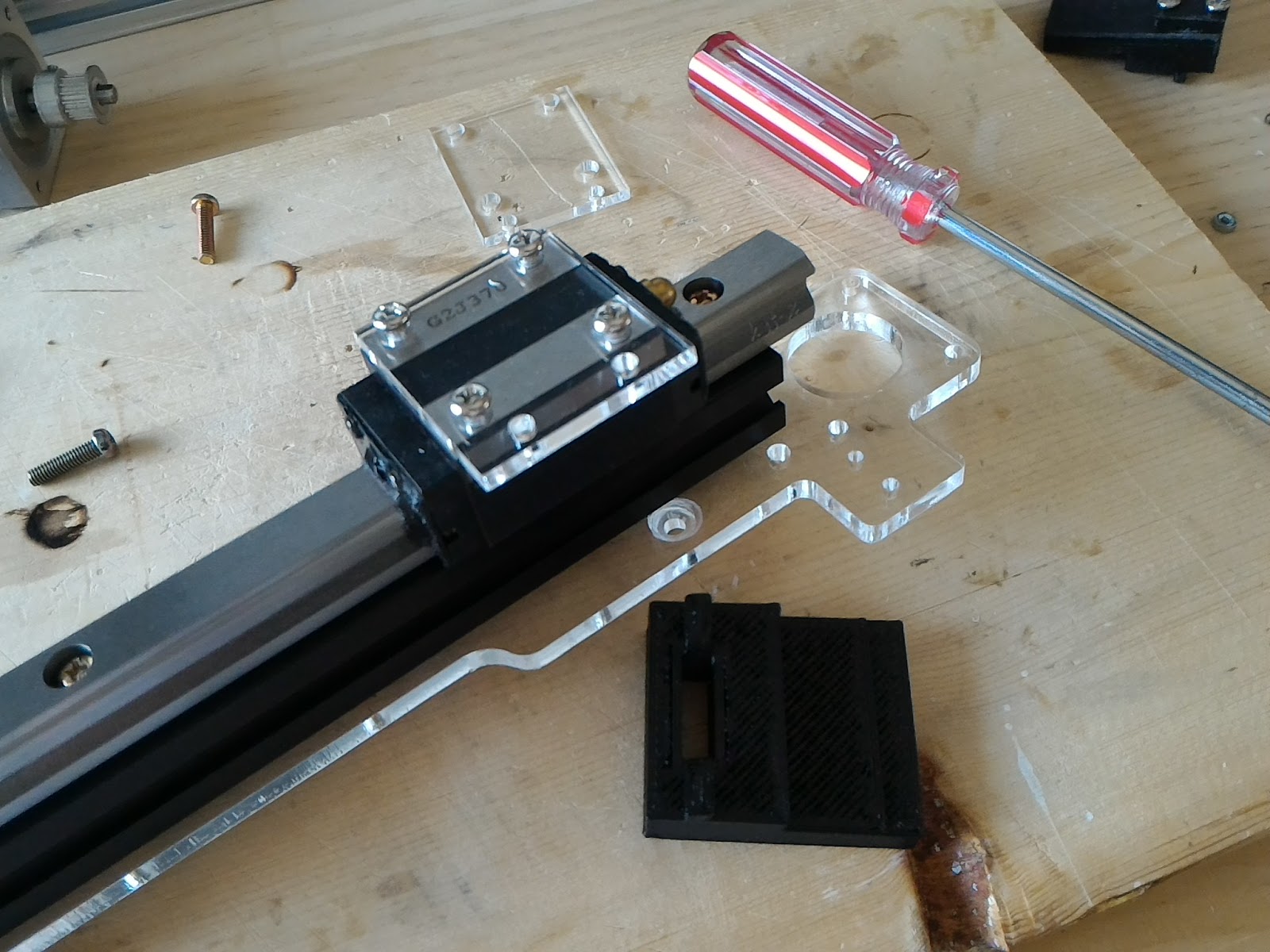
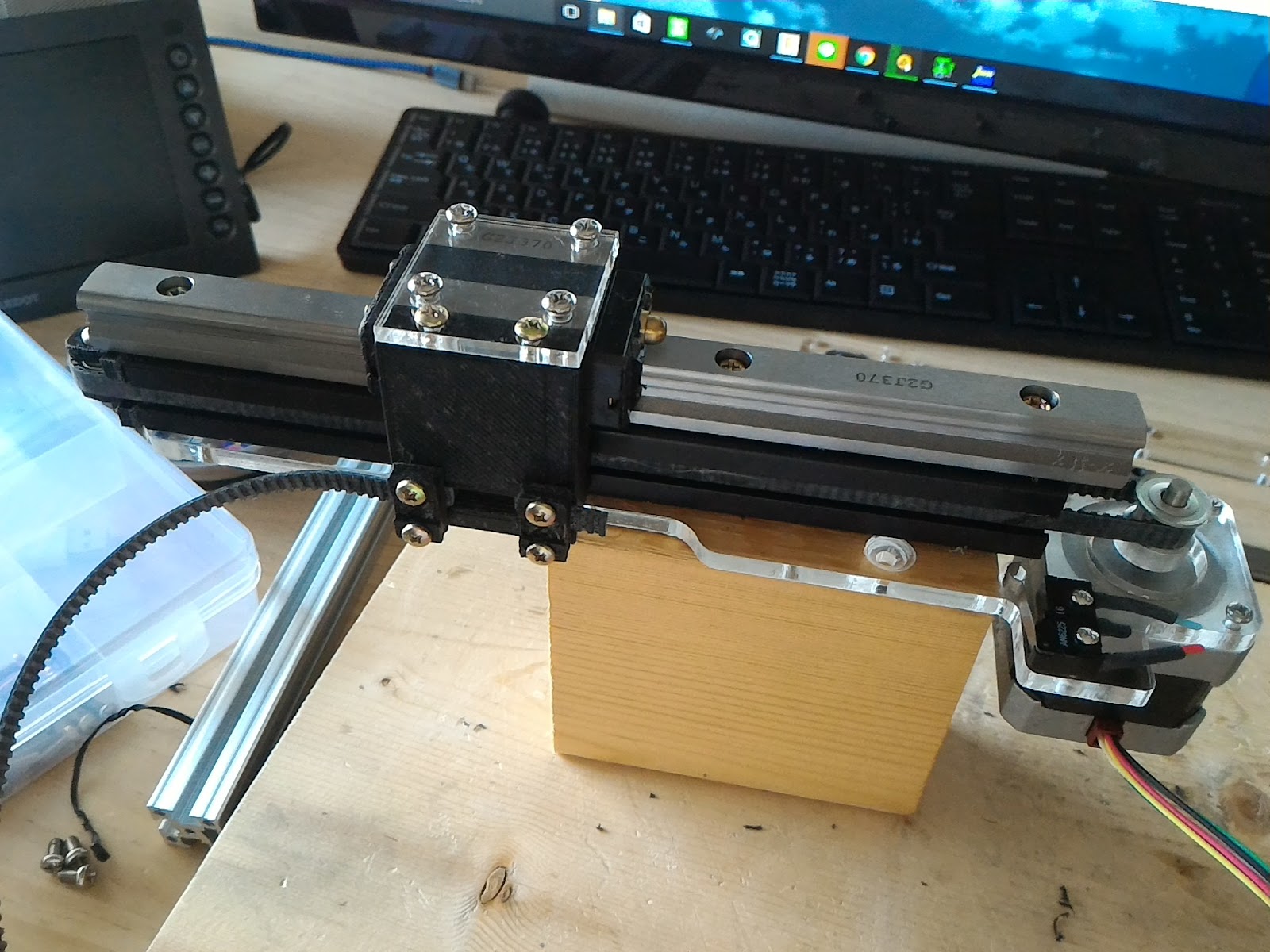
いい精度で出来てますね。パーツ間はぎりぎり近いですが、全くフレームをこすっていません。
こんな感じ。良いです。
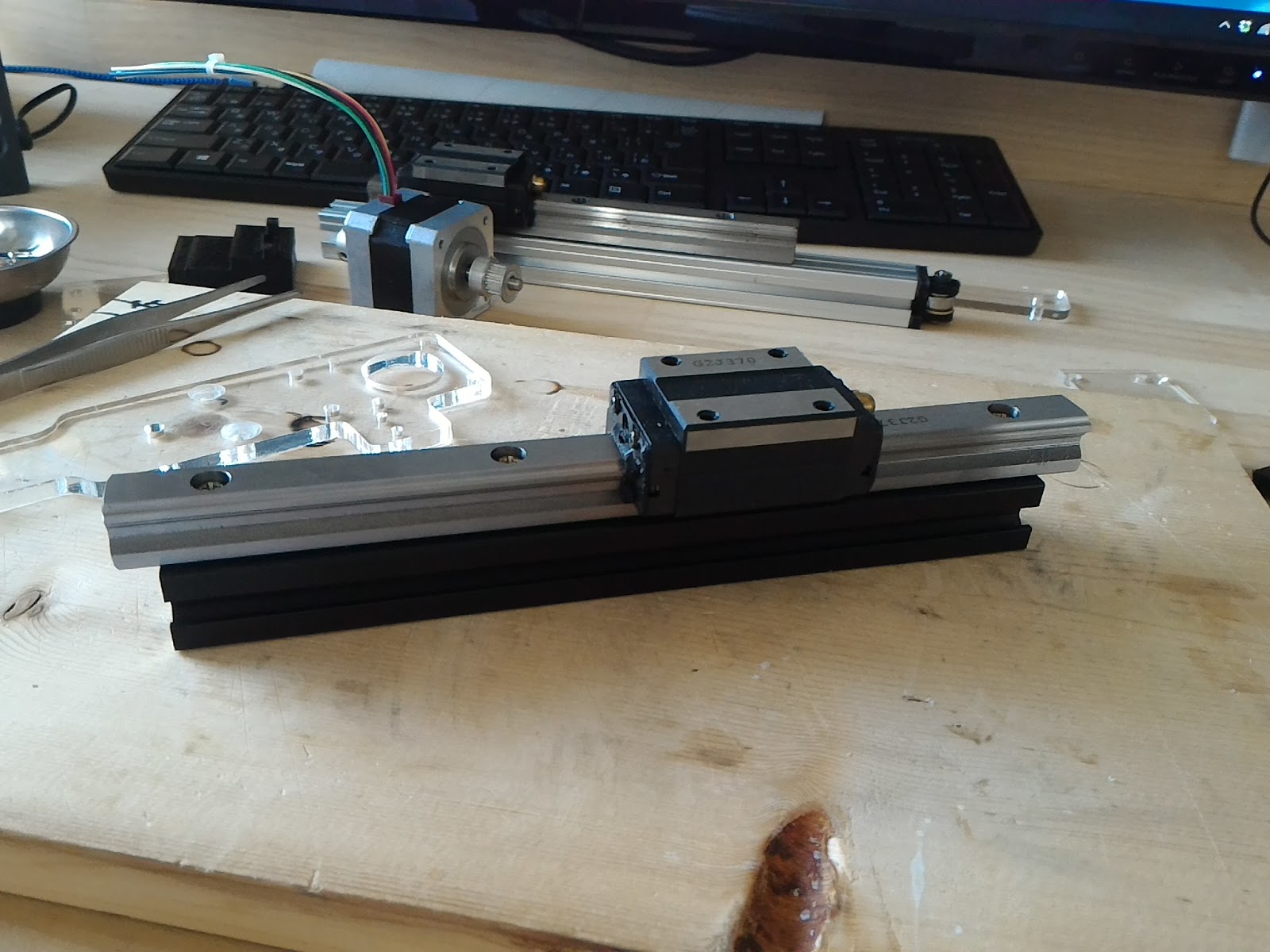
フレームの端にプーリーを移しておきます。

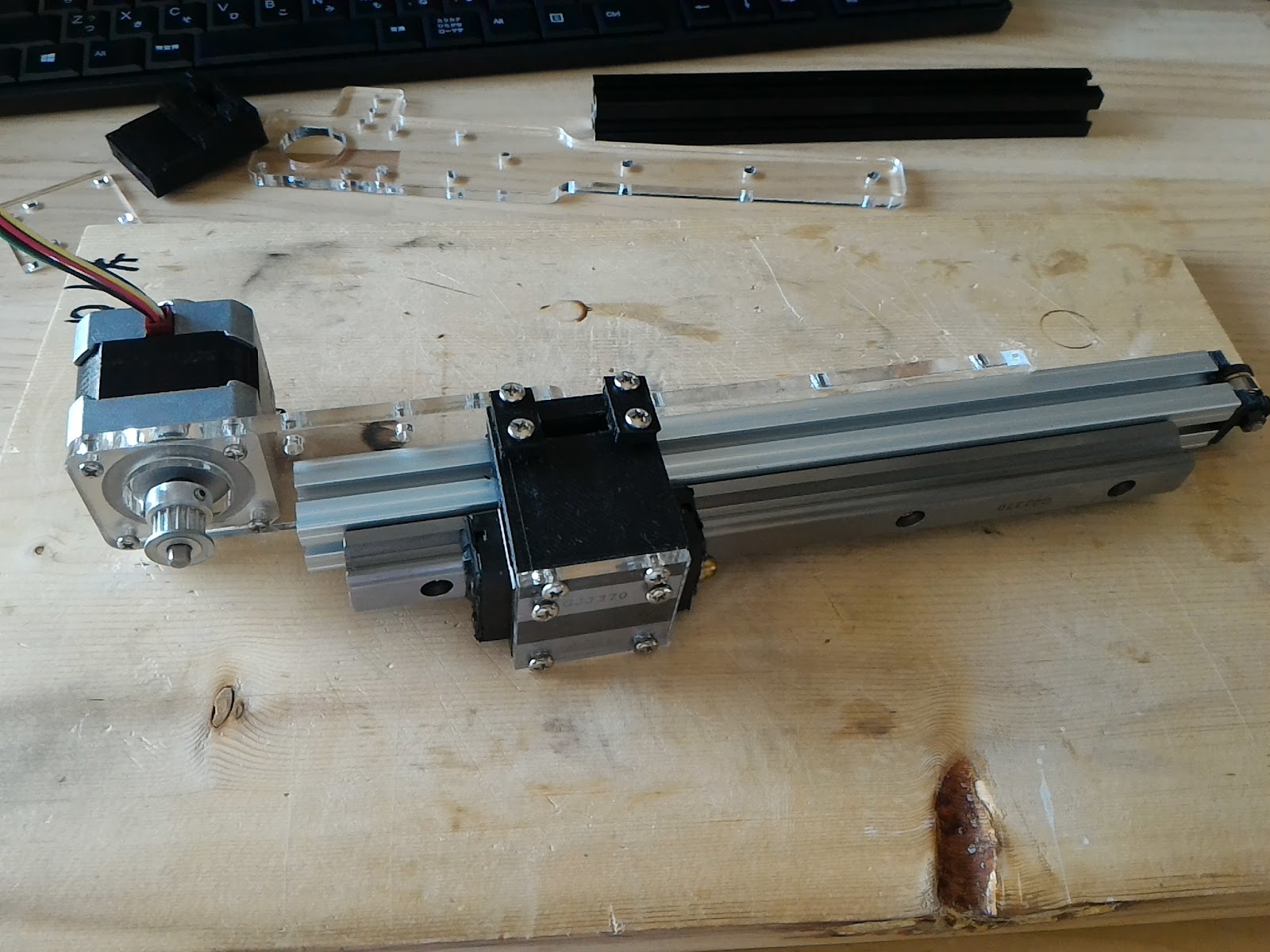
で、モータを取り付けて、
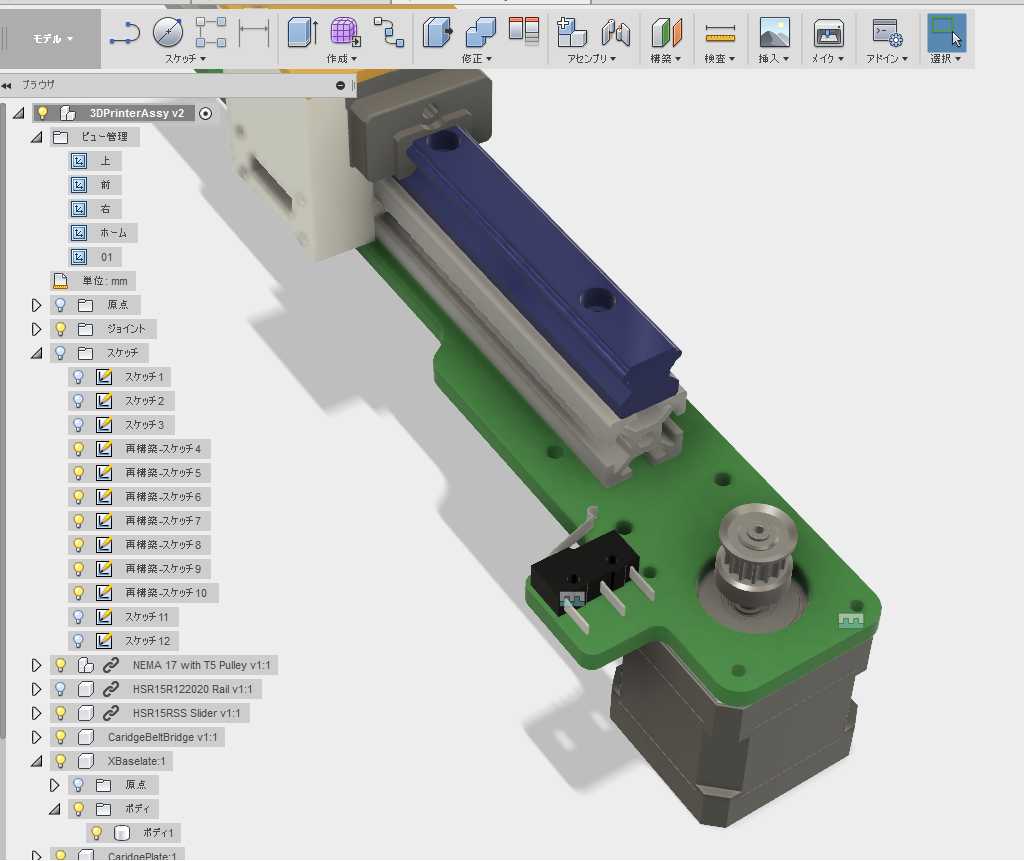
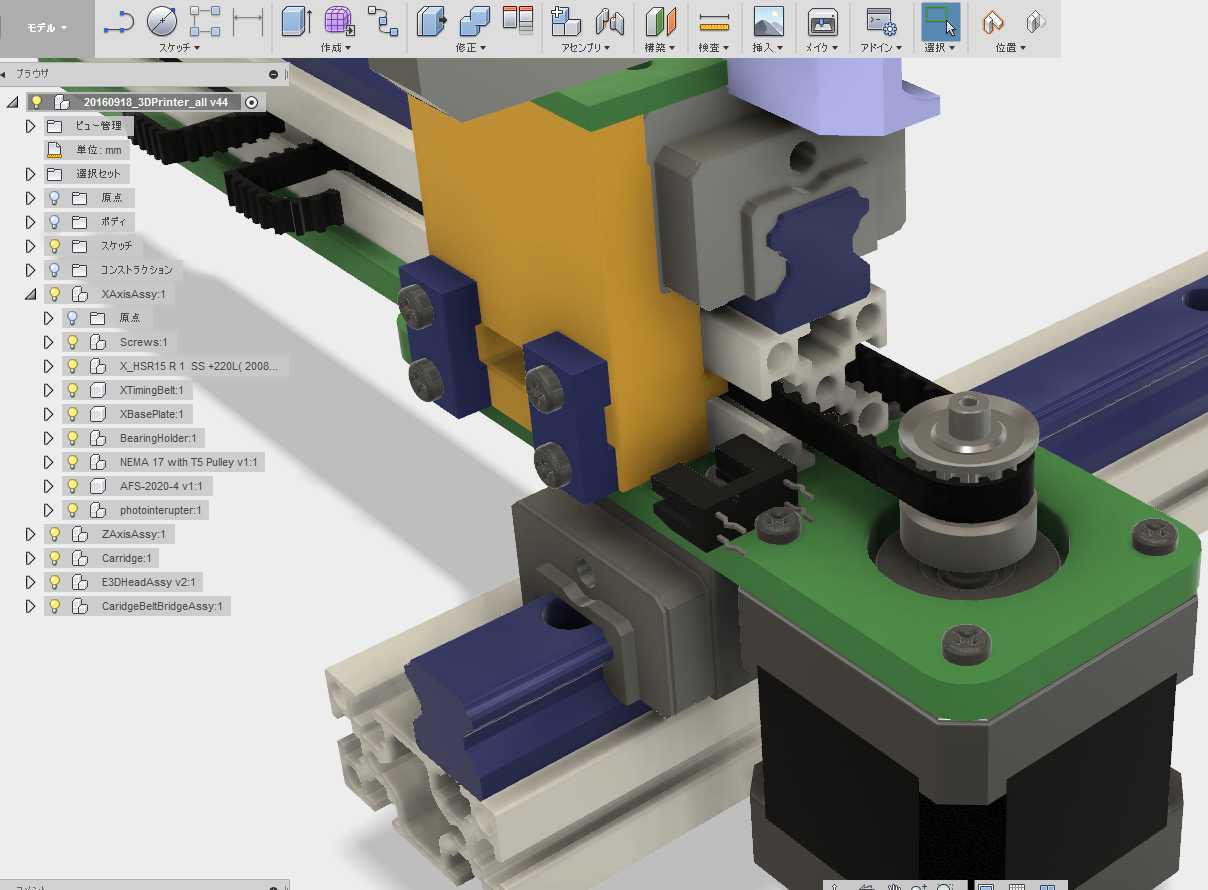
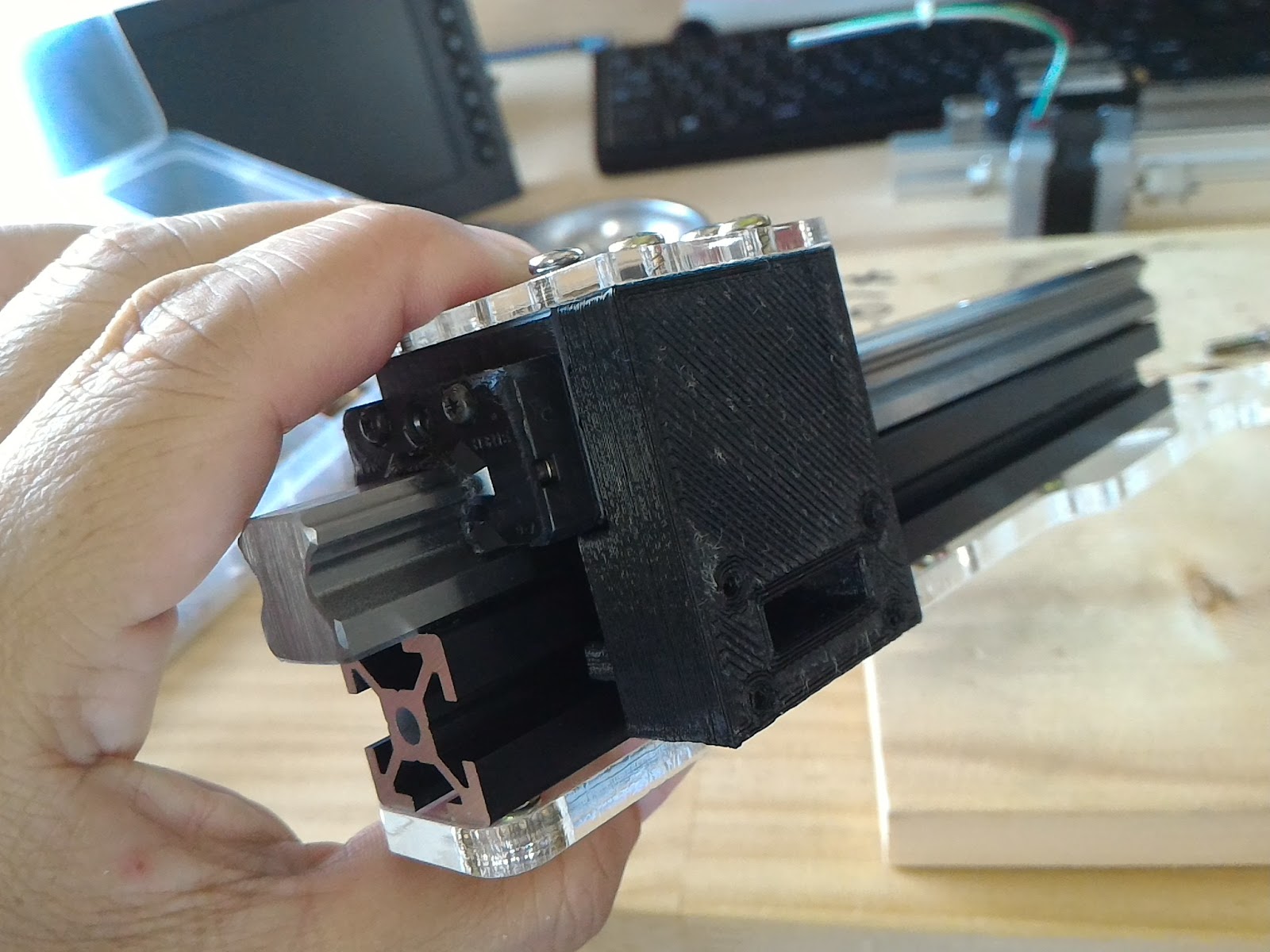
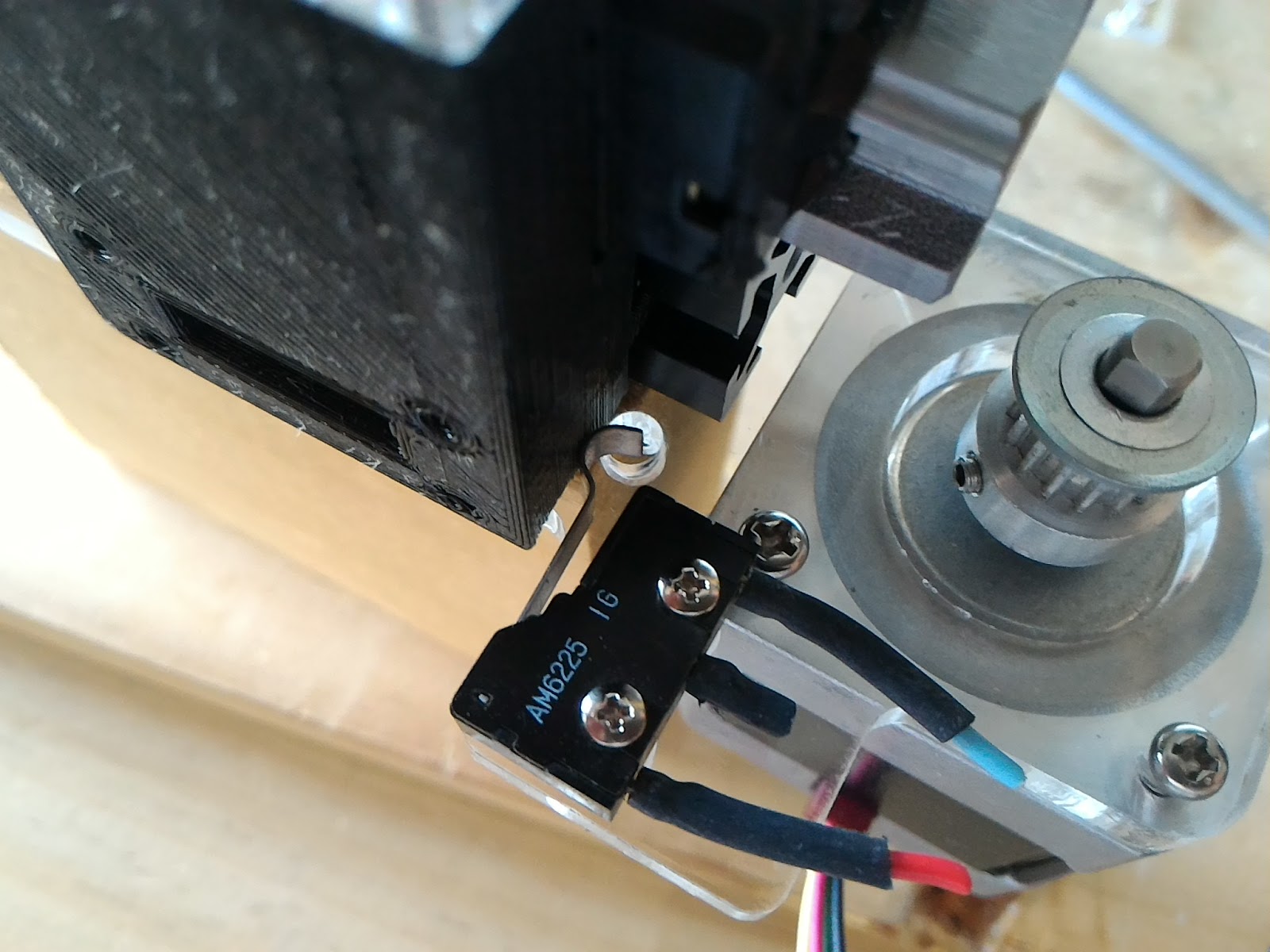
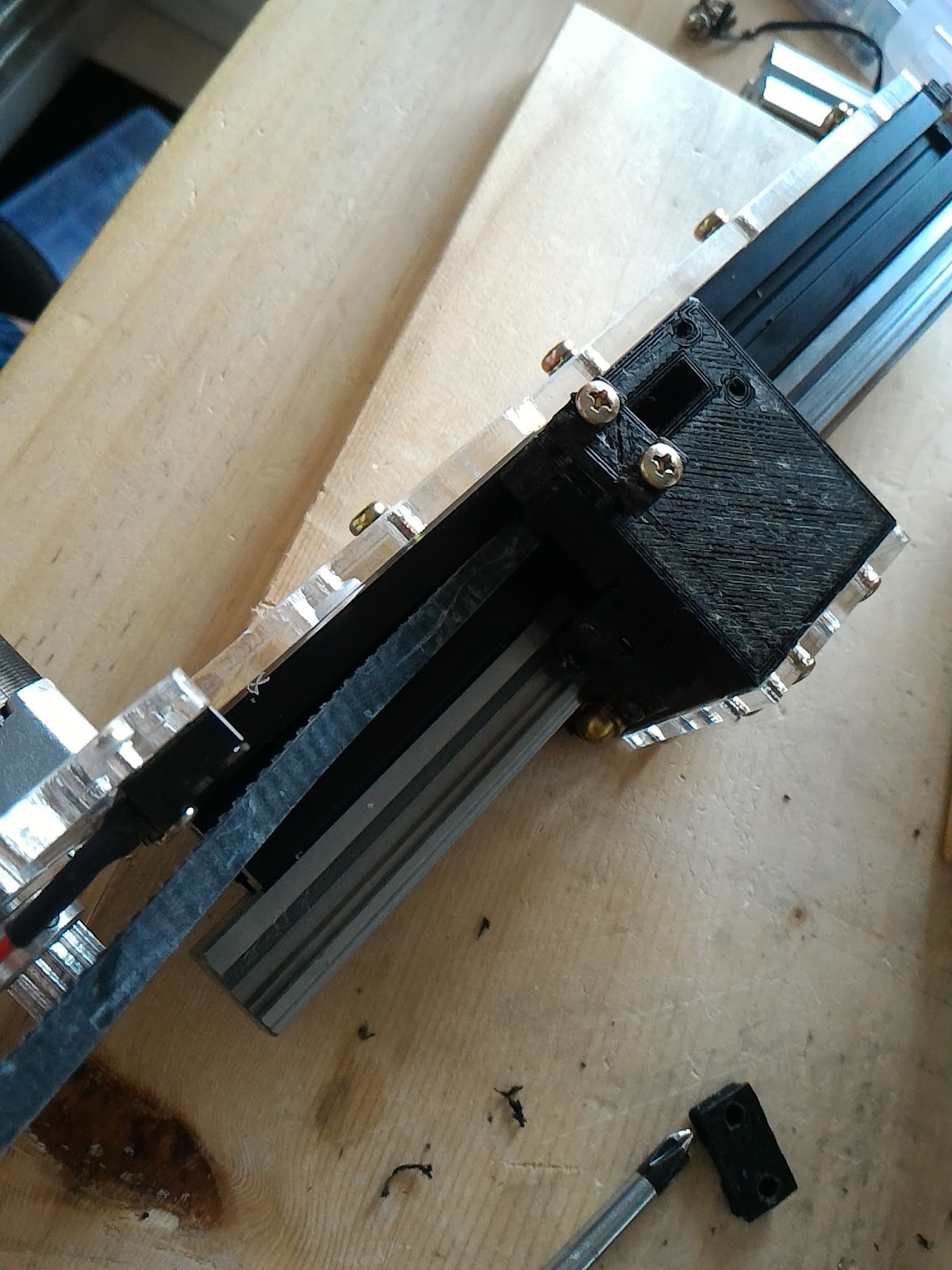
今回追加したマイクロスイッチの取り付けを行います。
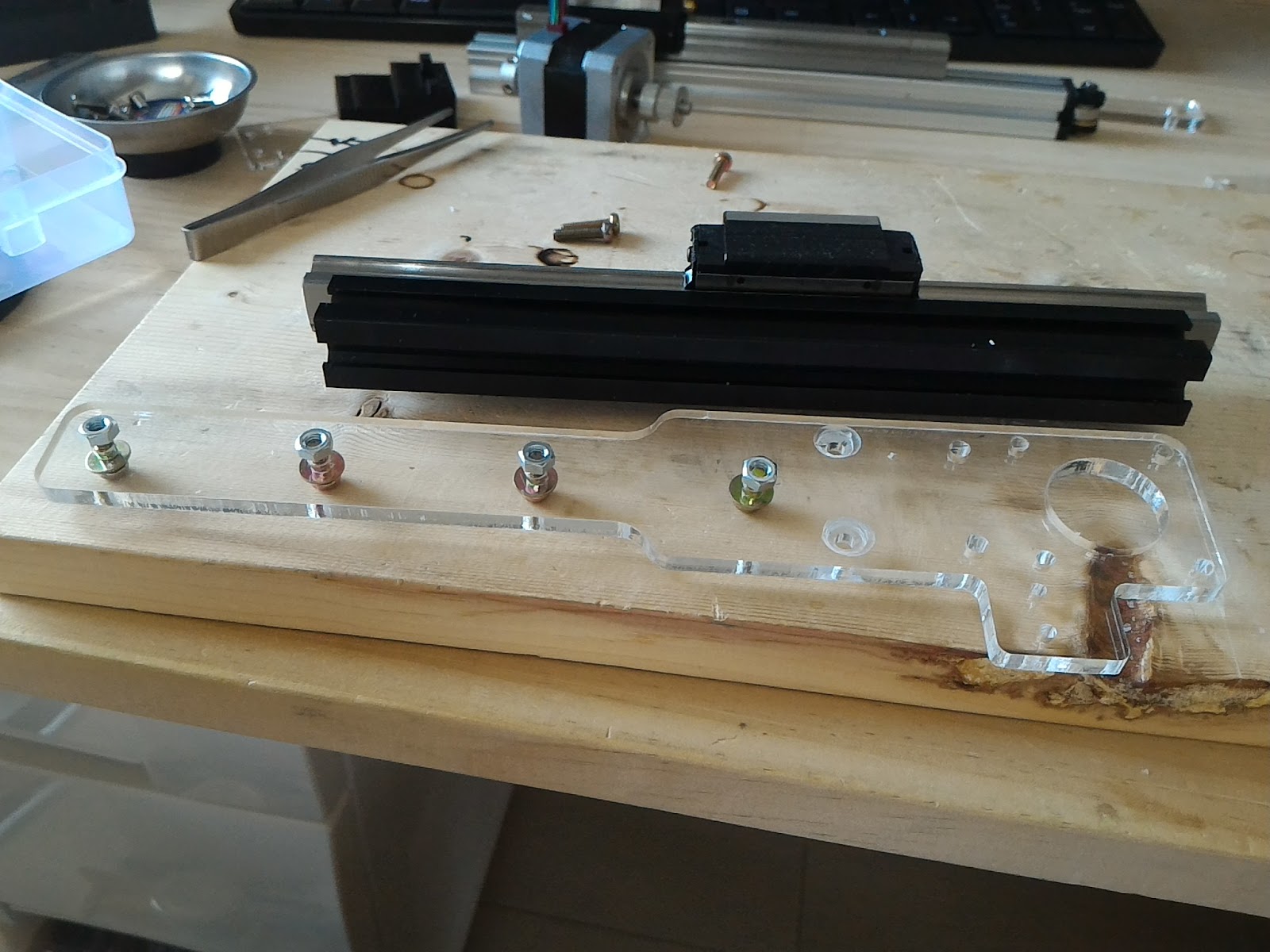
マイクロスイッチの本体には貫通穴が開いていますが、これがM2という困りモノ。
あんまりいろいろねじの種類がありません。長さが足りなかったので、裏からザグってナットで迎えに行っています。
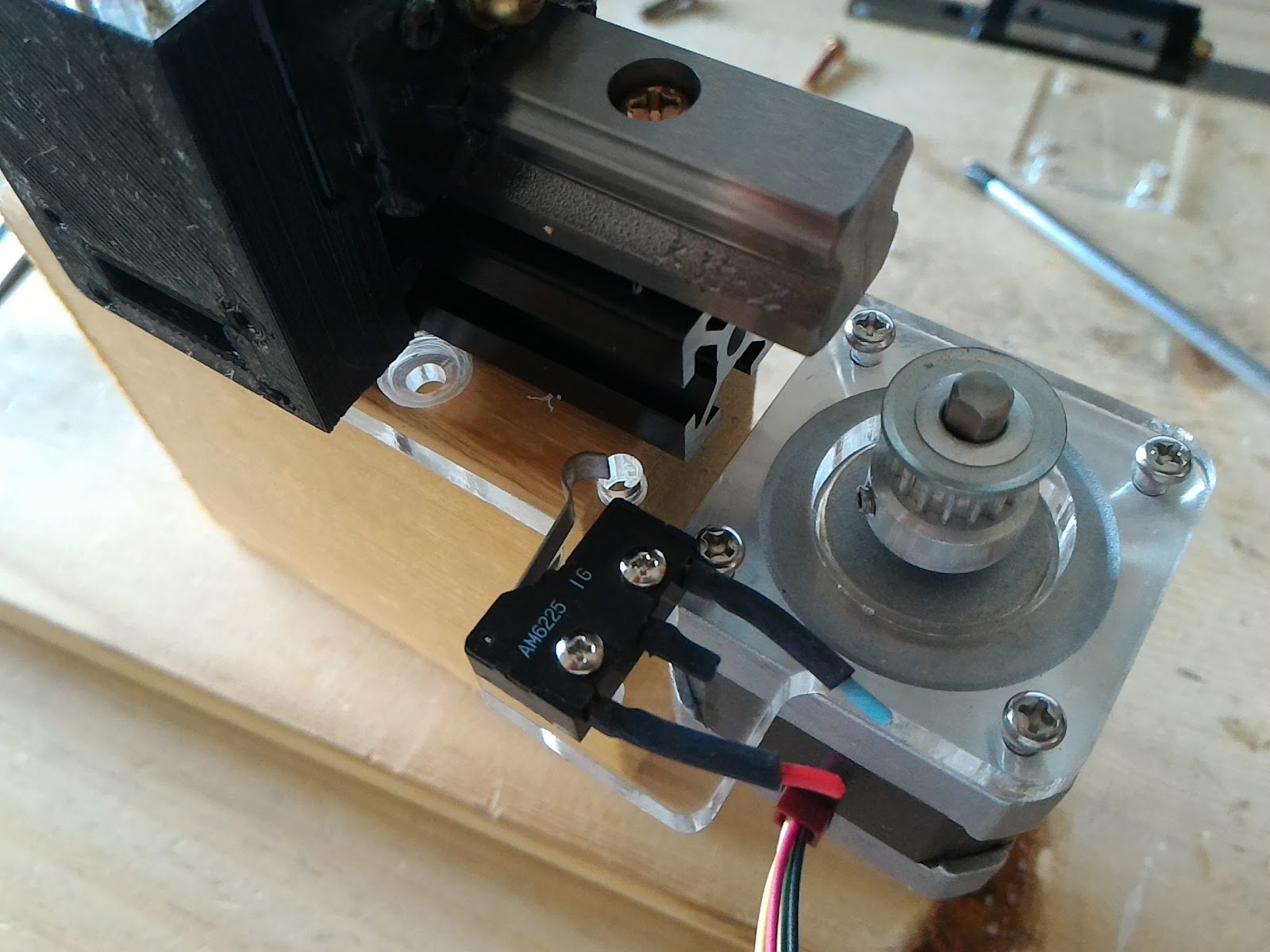
スイッチが効いたとこ。パーツのボディでスイッチを直接押します。
ここはリニアガイドが脱線しない限り位置調整は不要ですから、こんな簡単な構造でOKです。
いよいよベルトをかけます。
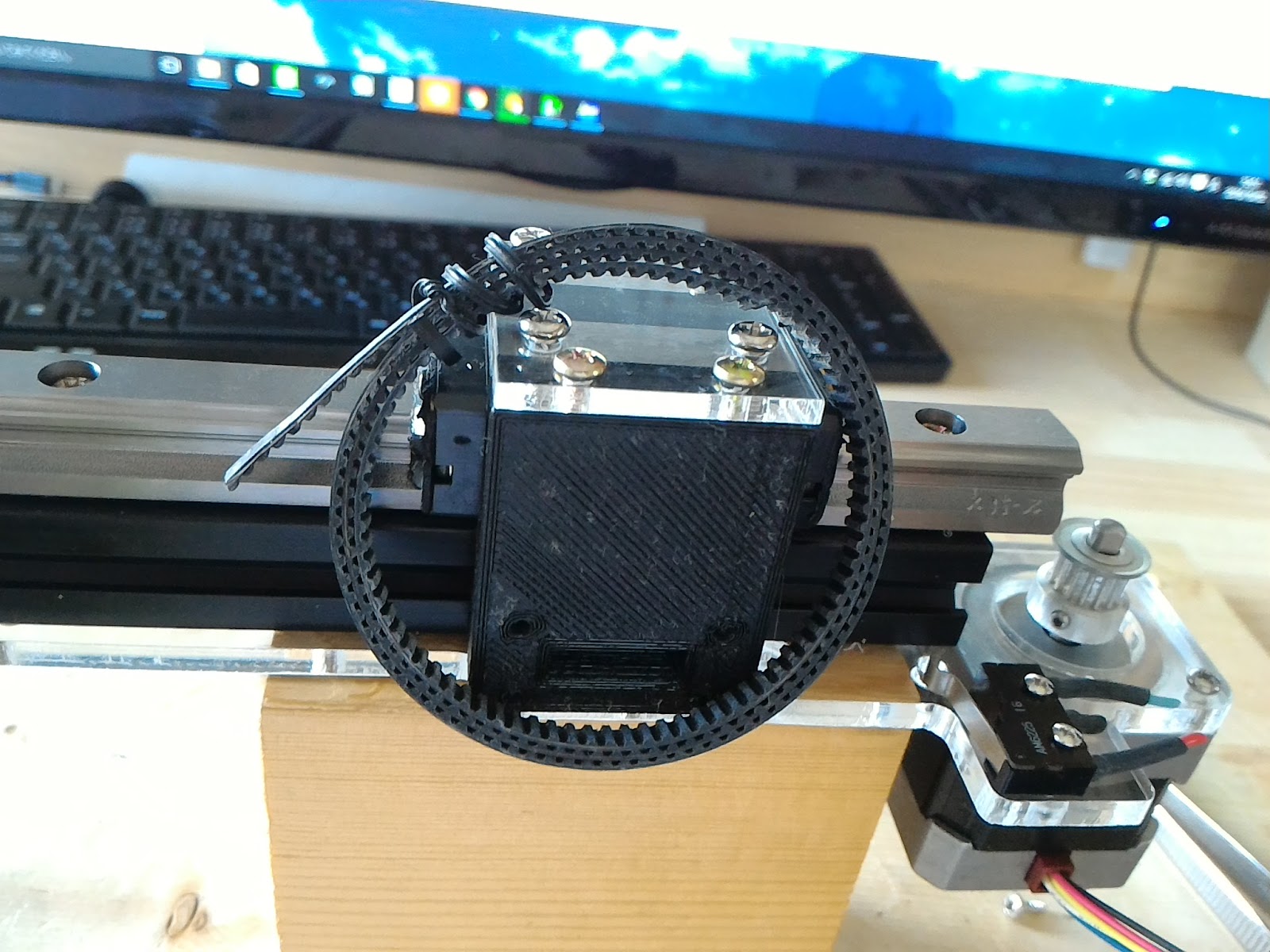
片方かかりました。いい感じに溝から引き揚げることが出来ています。ベルトとフレームの間の摩擦もほとんど感じられません。
反対側も留めました。あまりが異様に長いですが、今後なんの設計変更が必要になるかわかりませんので、当面このままにしておきます。
ちょっと動かしてみましょう。まだ手動ですが(笑
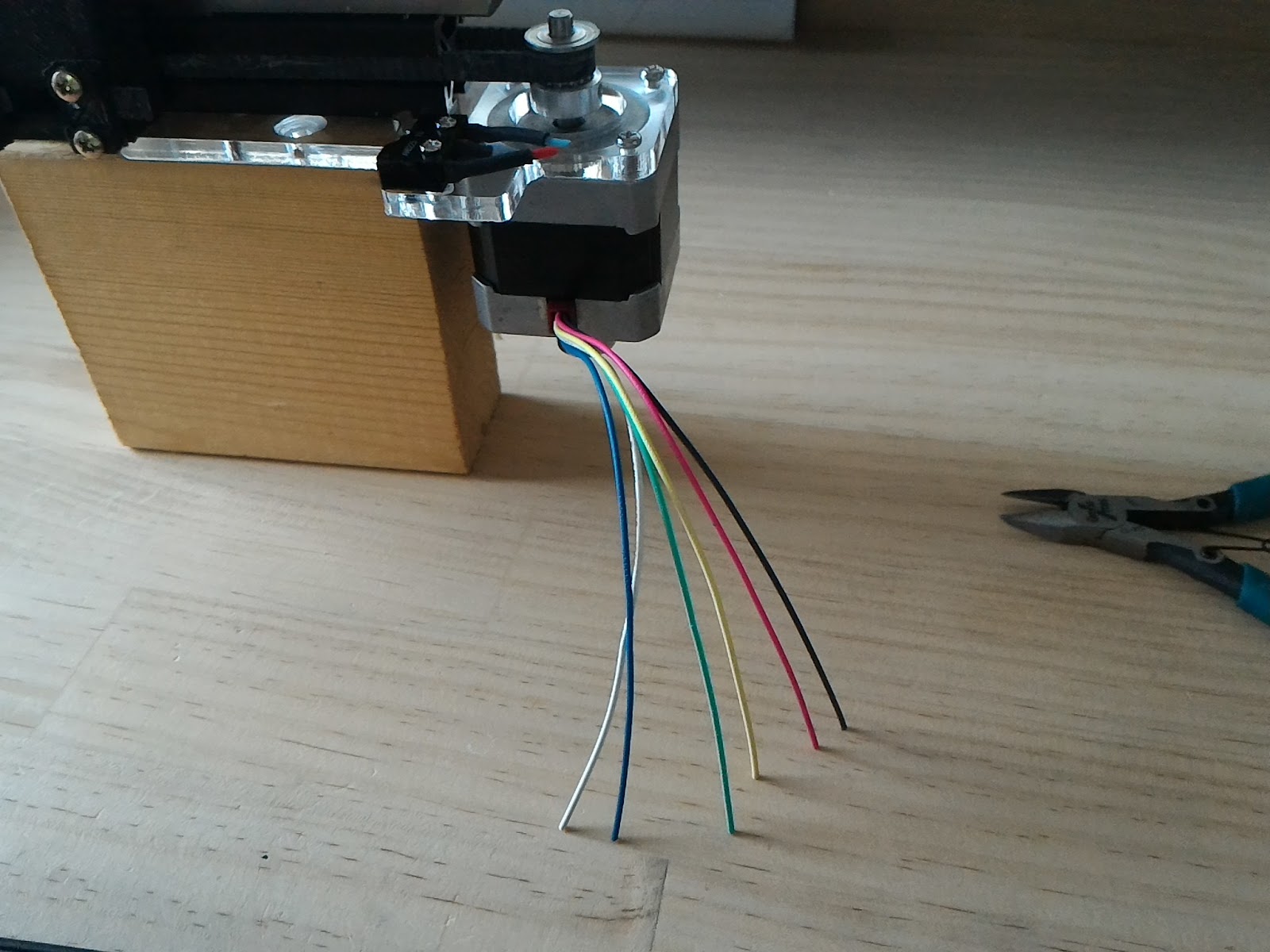
後はこのモータの配線をモータドライバと制御系に繋げばOKです。
このモータは6本線ですので、2相ユニポーラ駆動と思われます。これは無理やりバイポーラ駆動できることがわかっております。必要なのはどれとどれがつながっていて、どれがタップの引き出し線なのかを調べればよいです。
ドライバはYMMFの時に使ったGRBL用のものがありますので、まずはそれで実験してみたいと思います。最終的には「USB経由でMACH3がつかえる」と称する基板を使ってMACH3駆動を実験する予定です。