
フラターテック の池上さんからステッピングモータをお預かりしてきました。これを回したいと思います。とあるモノつくりの準備であります。
こちら。NEMA23モータです。でかいです。

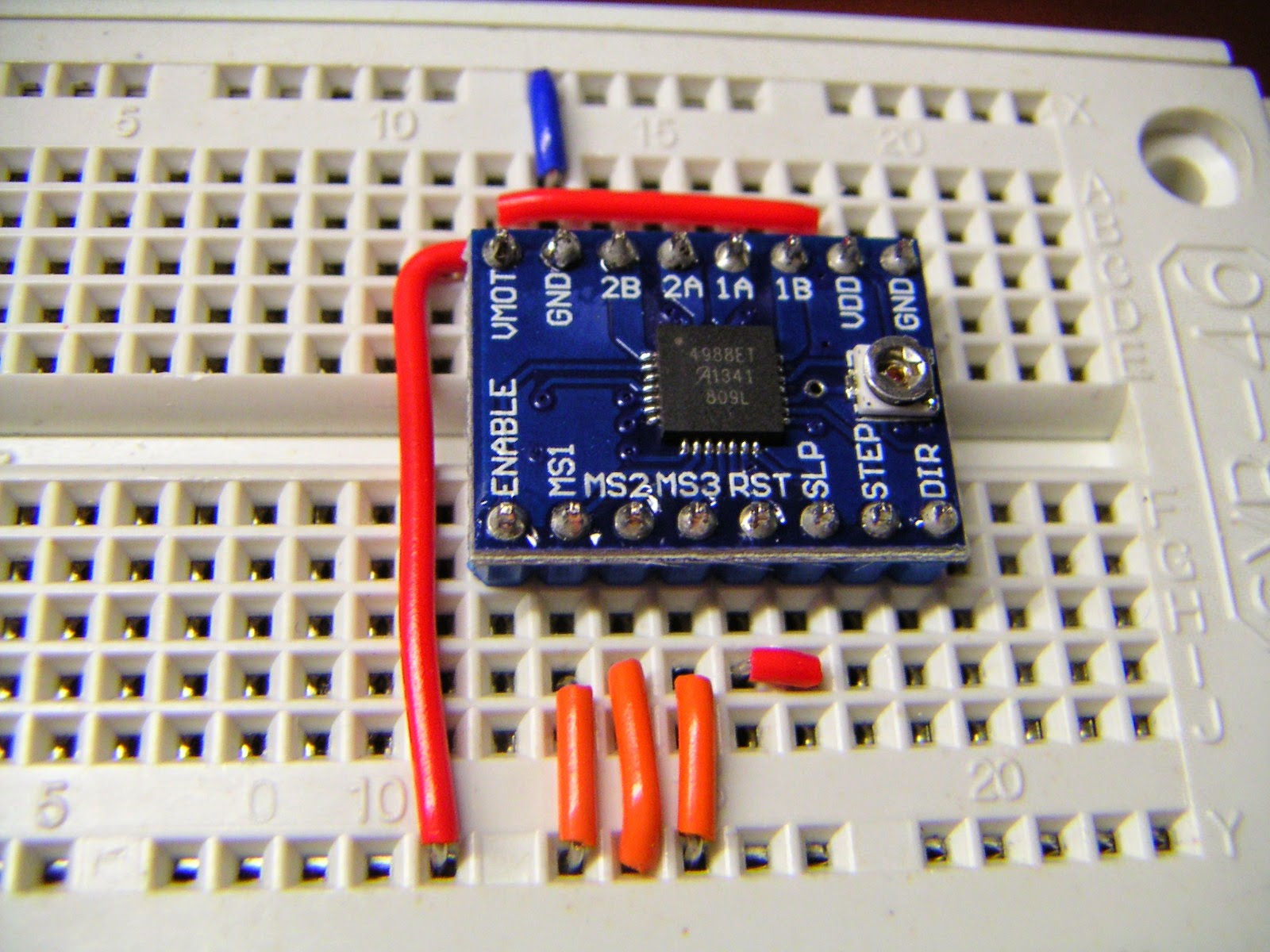
Pololu ドライバ互換の A4988 モジュールで動かします。
このモータは6本線の二相ユニポーラですが、センタータップは使用せず、二相バイポーラとして使います。
ハーネスを切って、
コイルの結線を調べます。テスターで線間の抵抗値を調べると簡単に結線状態がわかります。
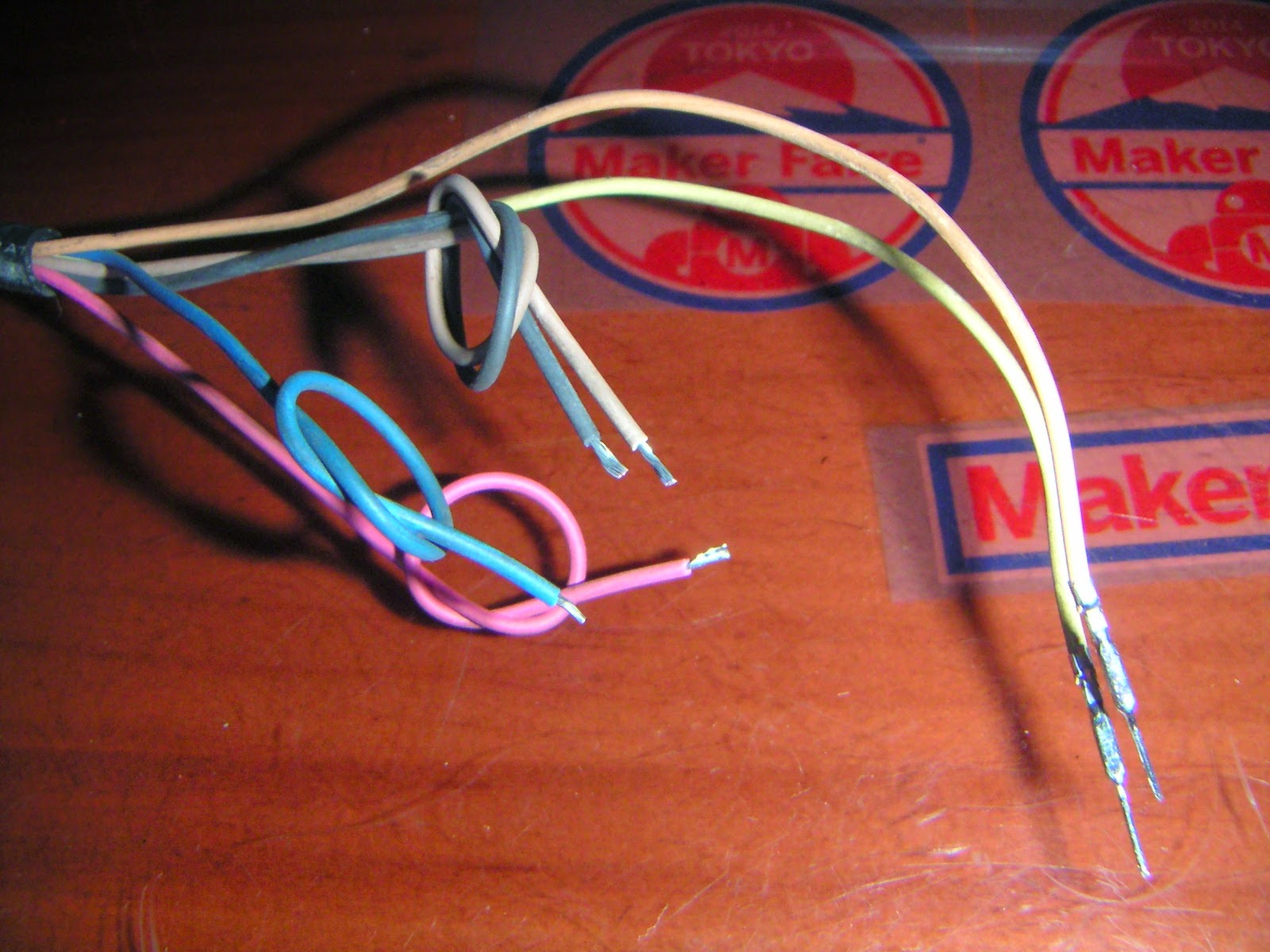
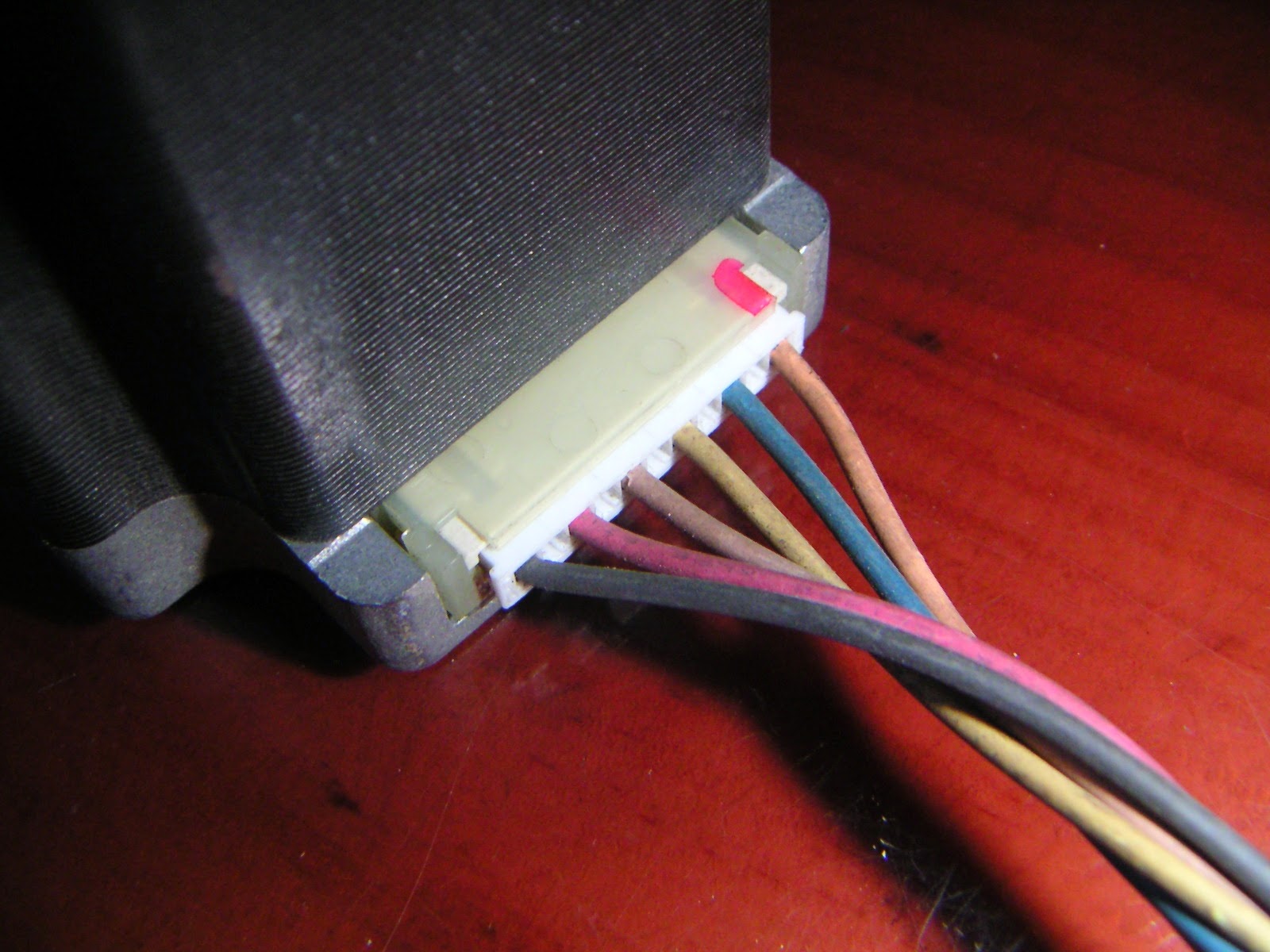
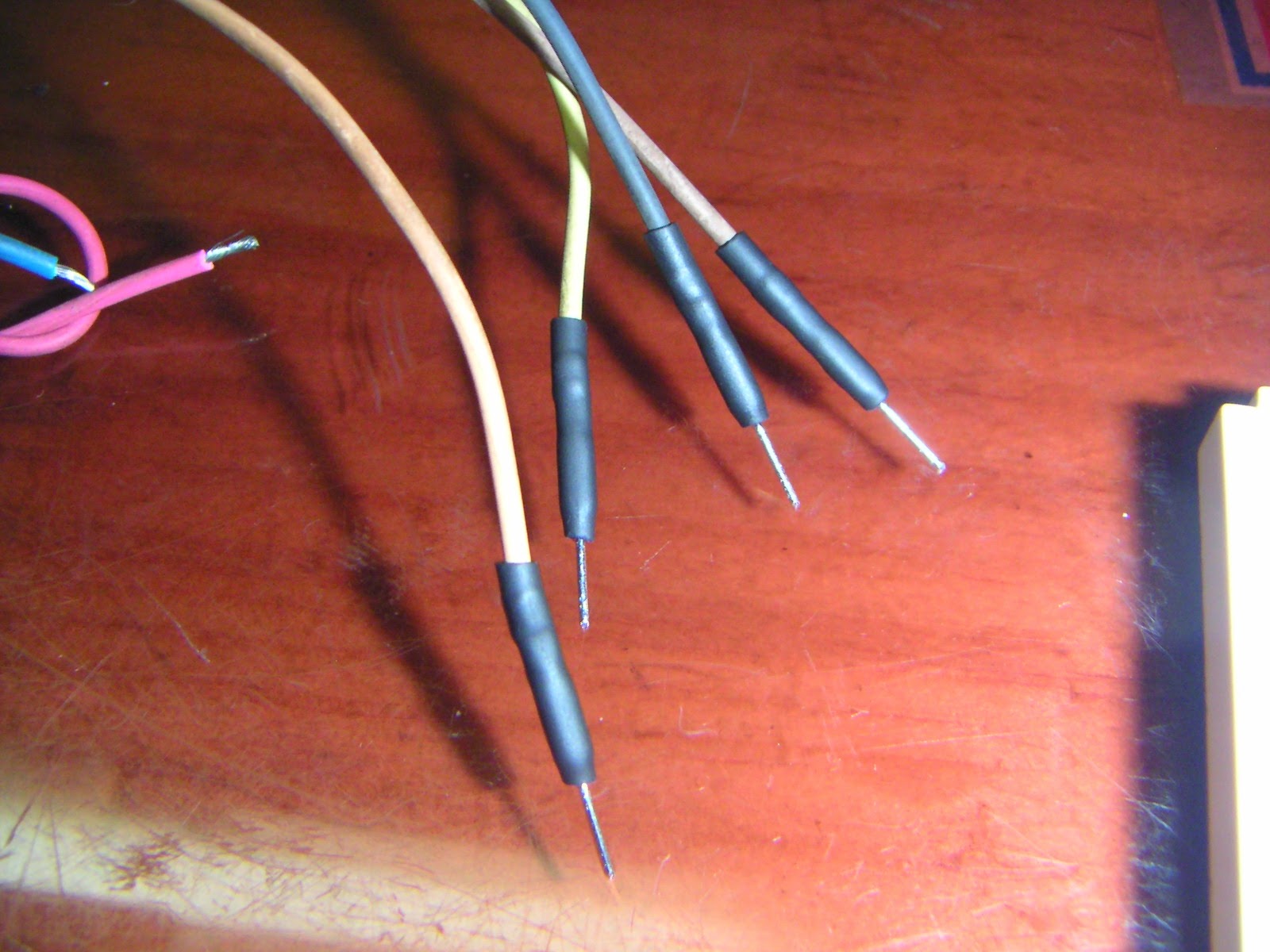
このモータは非常に素直で、下の写真でみると、右から三本が1相分で青がセンタータップ。左から三本も同じで赤っぽいのがセンタータップという引き出しになっておりました。
さて、回します。
大量にストックしているドライバモジュールを出してきます。
数えてみたら28枚持ってました(笑 さすがステッピングモータ好きのみら太な日々であります。
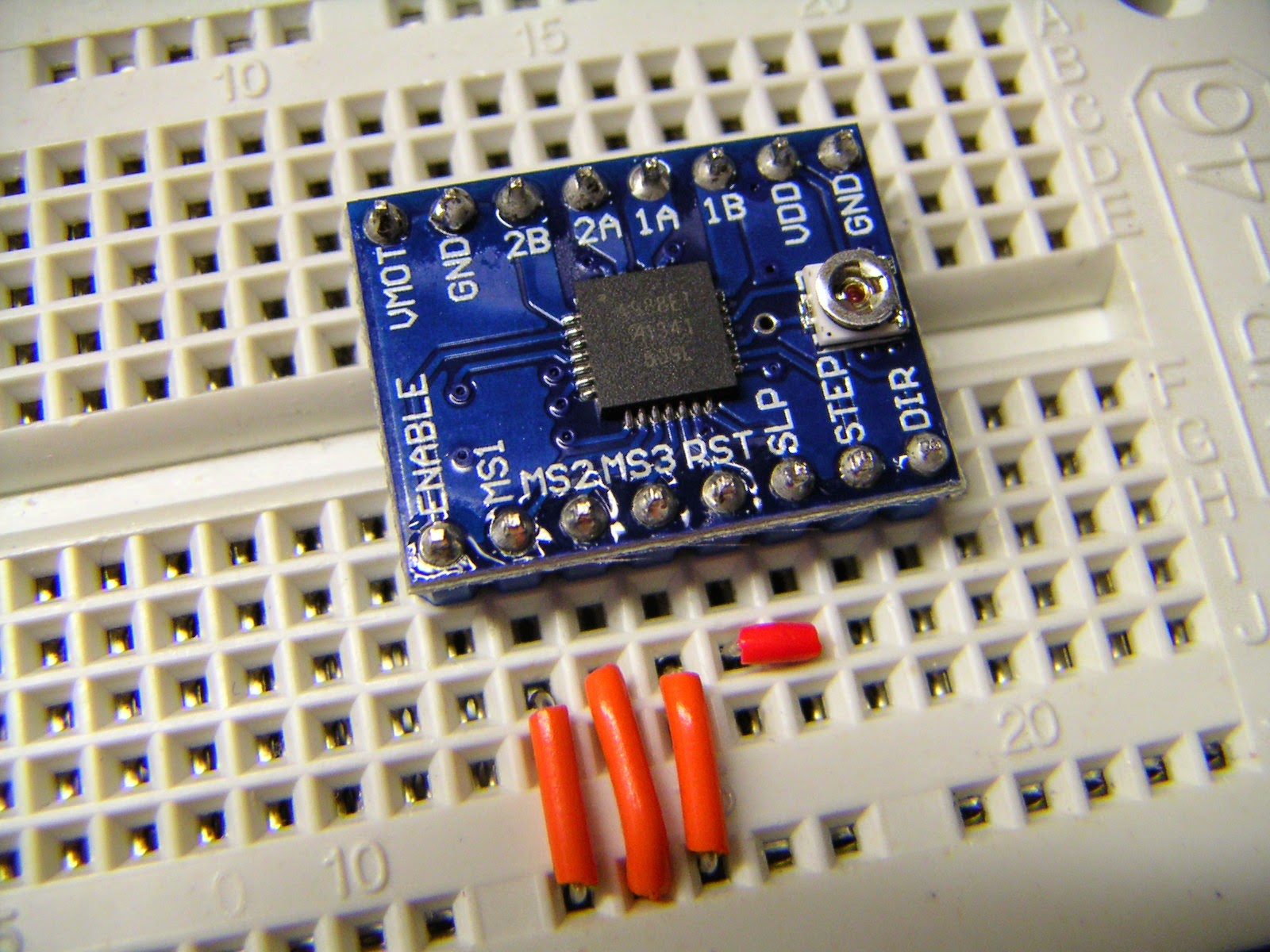
Pololu の説明をちらちら見つつ、ブレッドボードに仮組みします。
モータの引き出し線にはブレッドボード用にピンをつけておきます。
最近お気に入りで多用しているデュポンコネクタのオスコンタクトを使います。
結線はこんな感じ。まずはフルステップで回します。
パルスを出すのはArduino さんを使います。いつもお世話になっております。
スケッチは出すまでもないですが、一応。
void setup() {
pinMode(02, OUTPUT);
pinMode(03, OUTPUT);
digitalWrite(03, LOW);
}
void loop() {
digitalWrite(02, HIGH);
delay(1);
digitalWrite(02, LOW);
delay(1);
}
こんだけ。
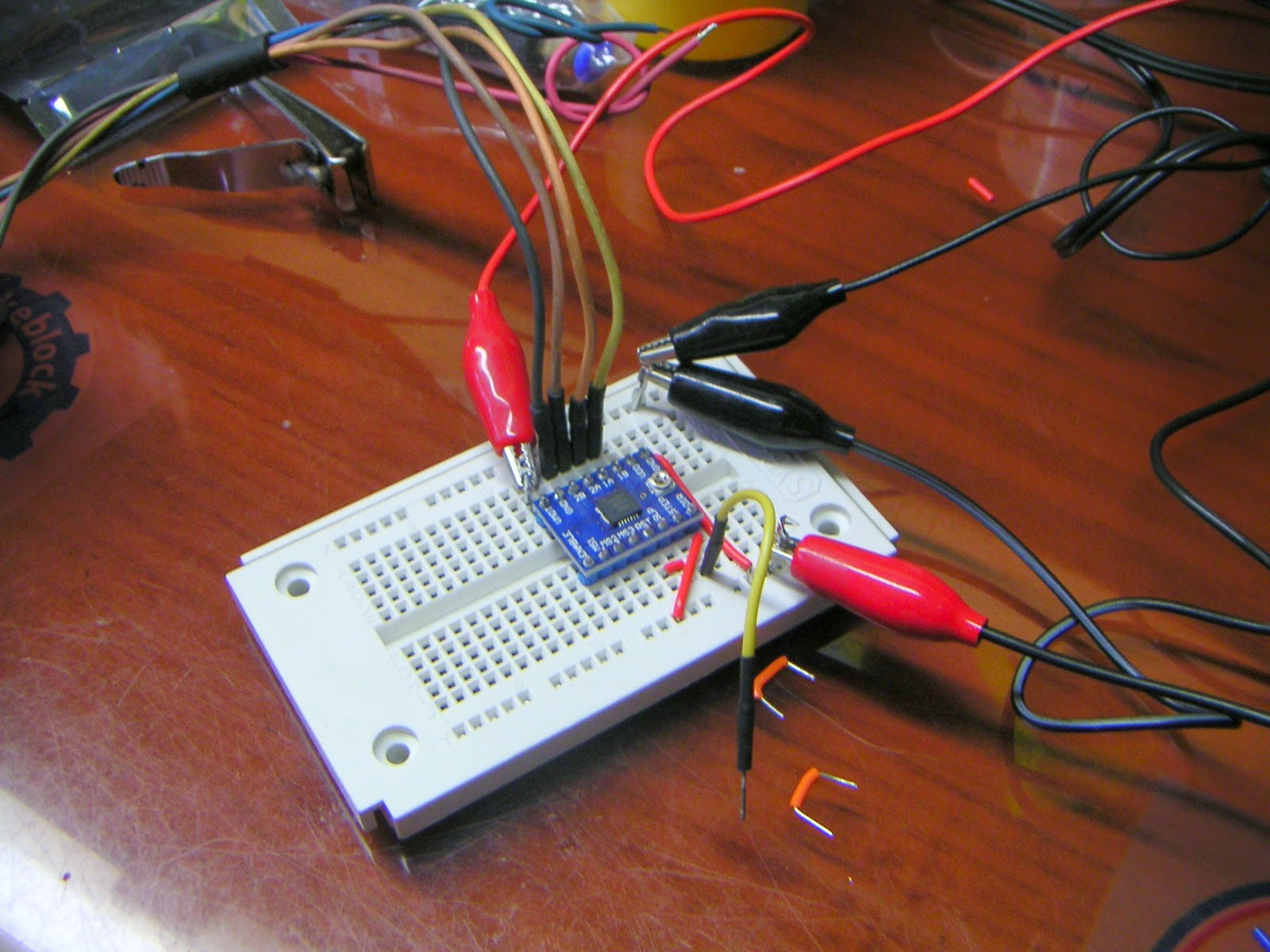
モータ繋いで、
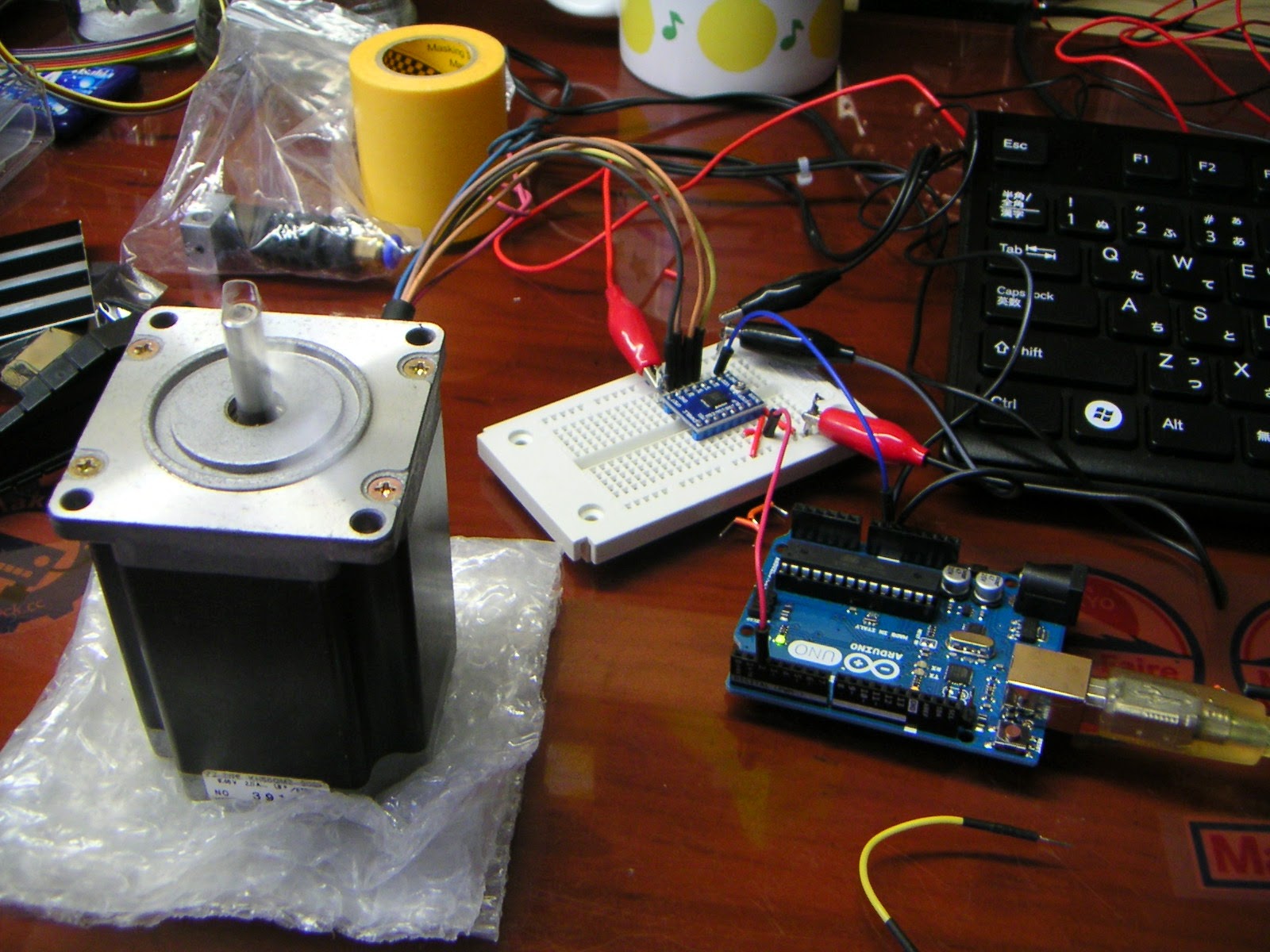
回します。
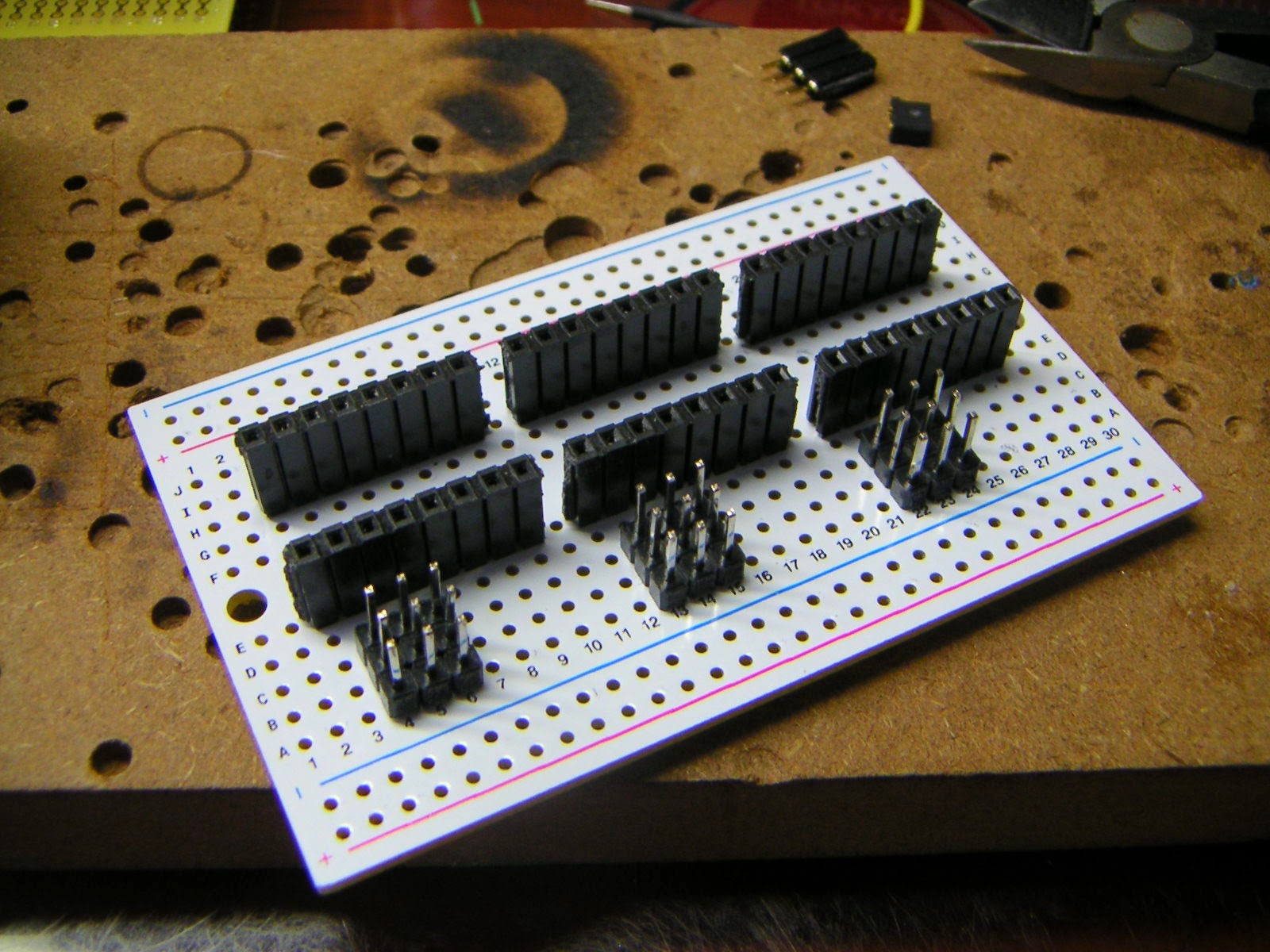
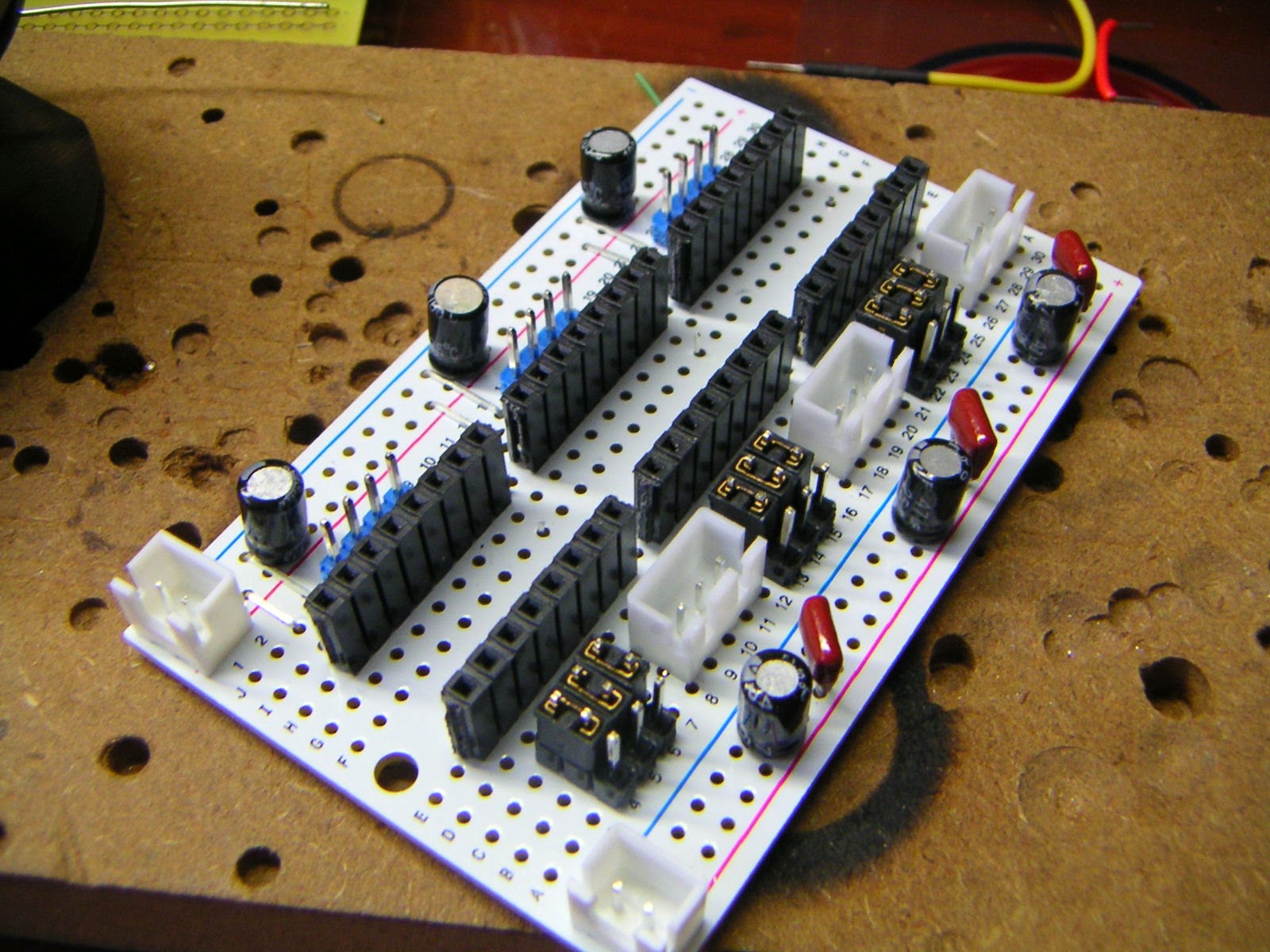
無事回りましたので、これをちゃんとした基板に作りこみます。
せっかくですから3軸分作ってしまいましょう。
モジュールはピンソケットで差し替えられるようにし、マイクロステップの分割率選択はジャンパコネクタを使うようにします。
マイクロステップまわりの配線がちっとばっかり面倒です。GNDに落とすか、Vddに吊るかを選択します。
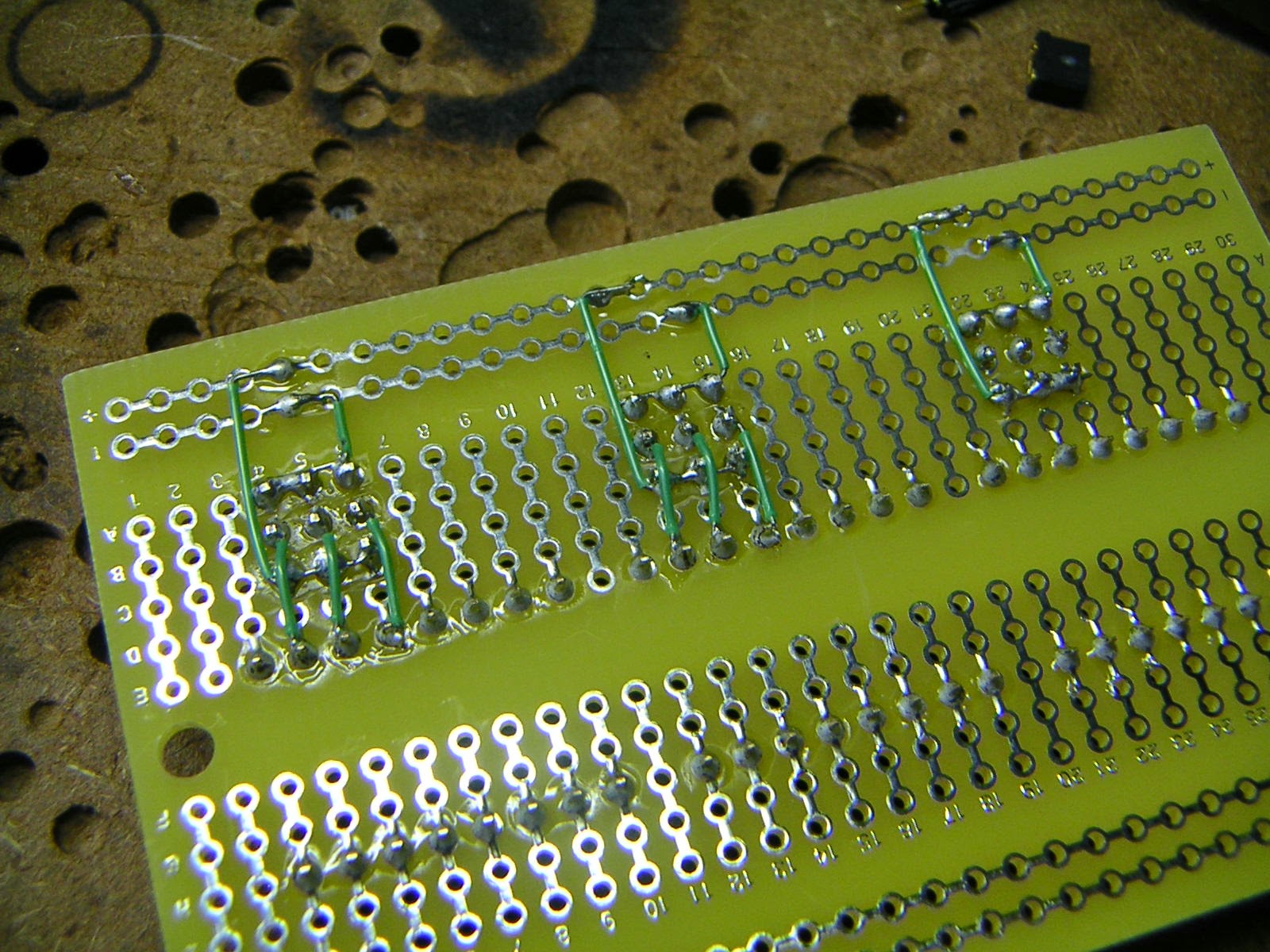
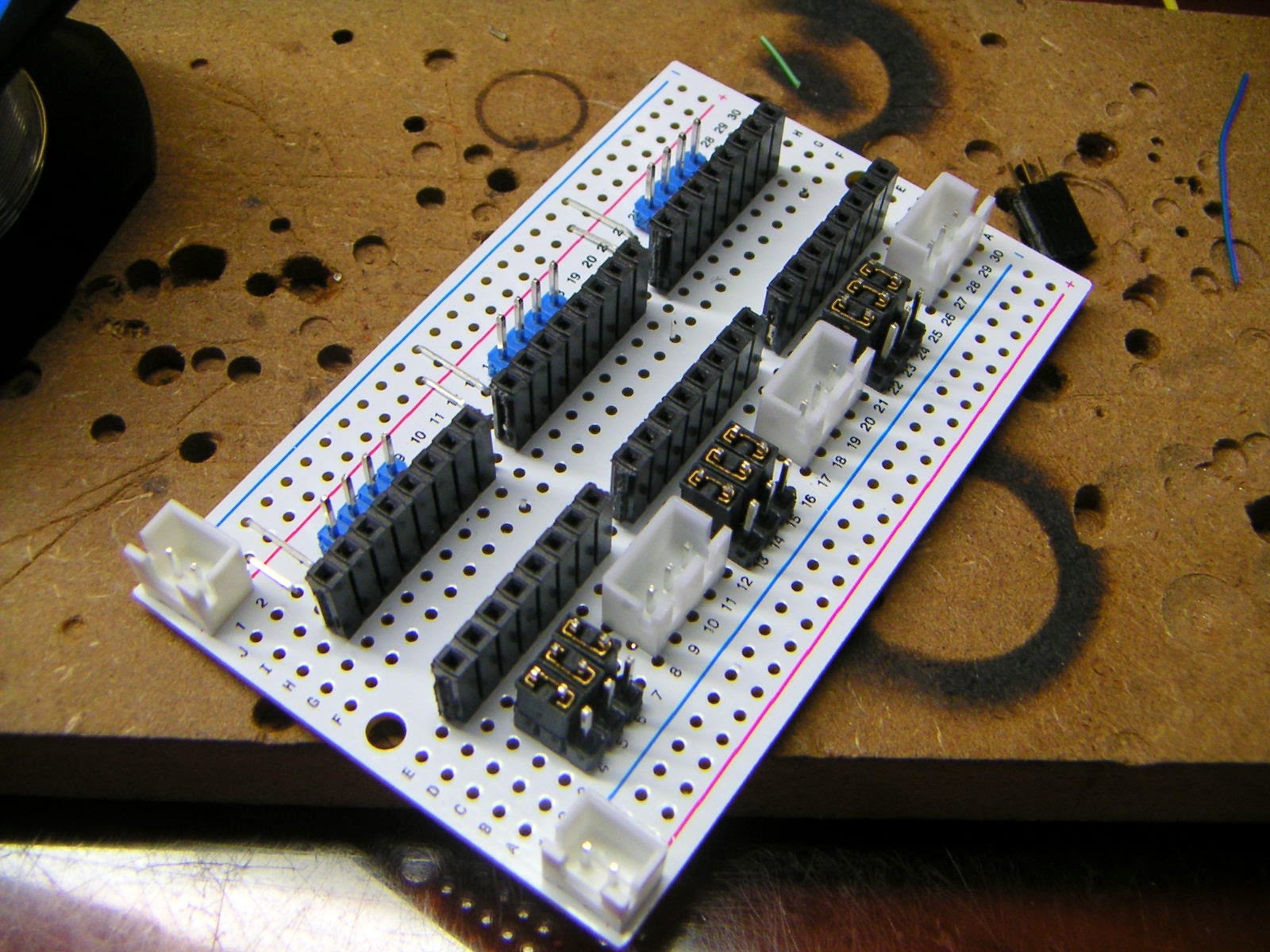
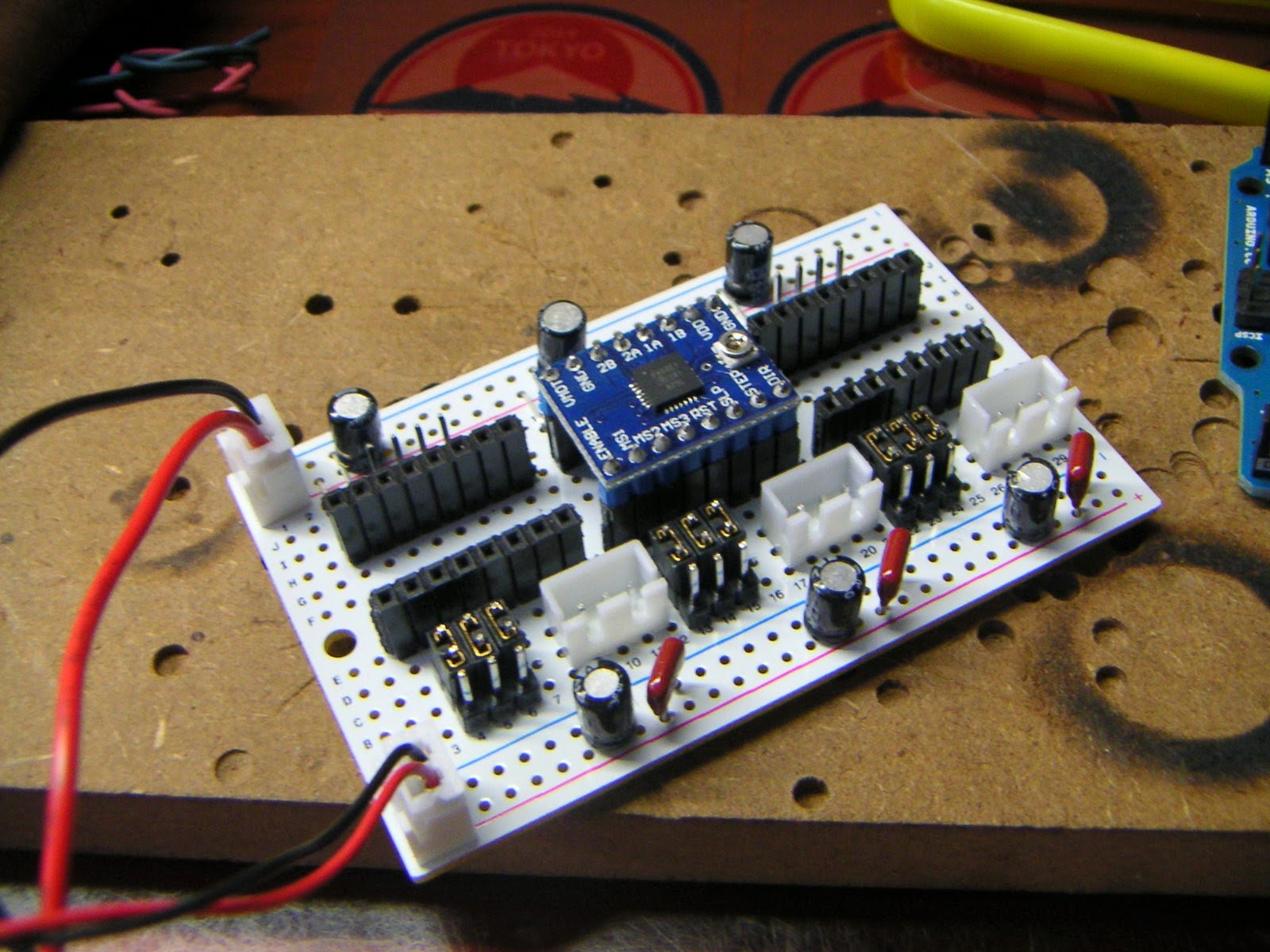
コントロール、ロジック電源、モータ電源、モータ結線のコネクタをそれぞれ配線します。
作業風景。
このごちゃごちゃ感がいいですねえ。作業台という感じで落ち着きます。

バイパスコンデンサを贅沢に配置。
こんなには要らんと思うんですが、念のため。
ハーネスを作っていきます。コネクタはXHを使います。

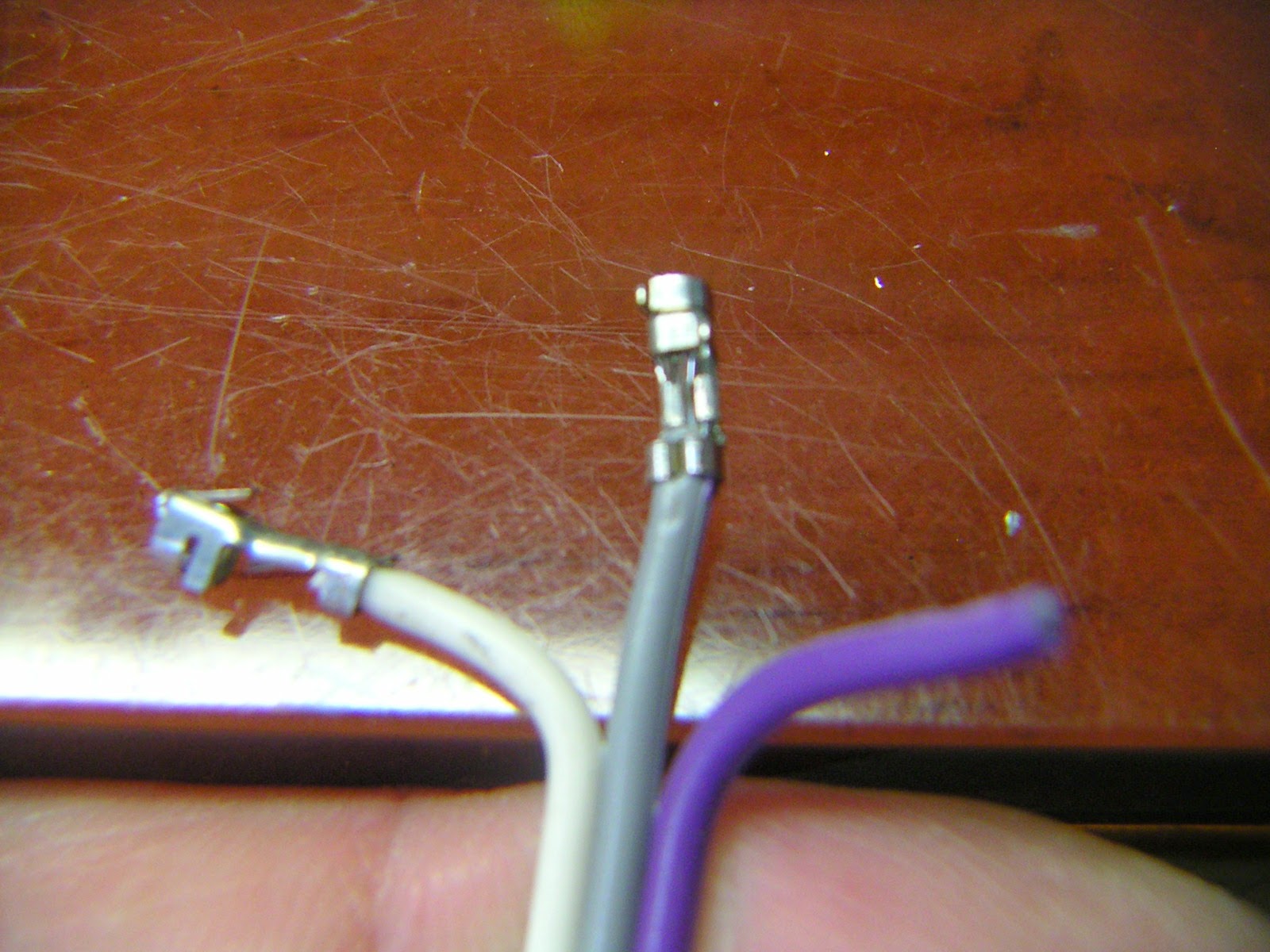
コンタクトつけたとこ。
コネクタのコンタクトかしめ作業はなれると非常に楽しいものです。
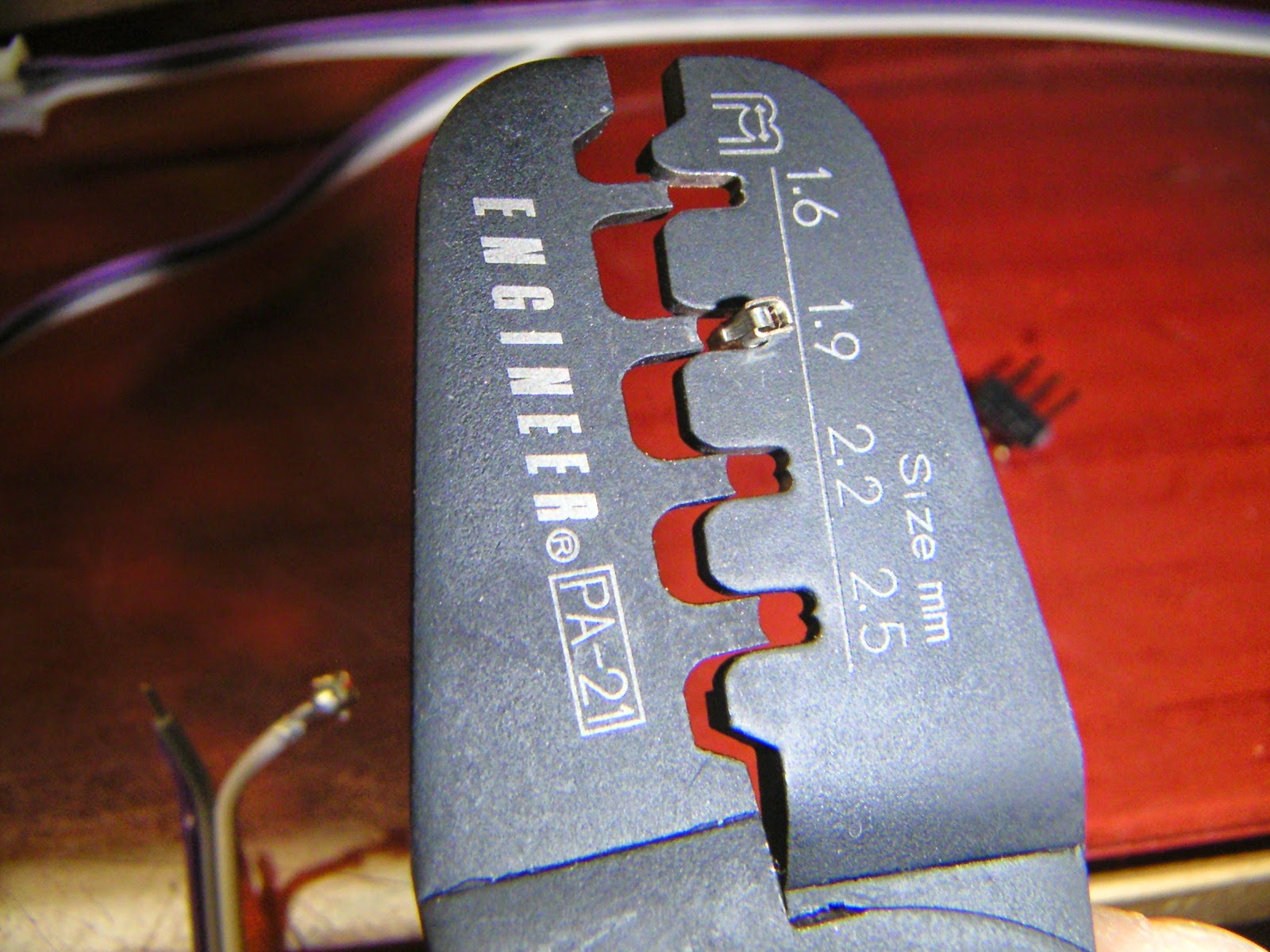
わたしはカシメ冶具としてエンジニアのPA-12とPA-08を使っています。
まず電気接点をかしめて、

こんな感じ、
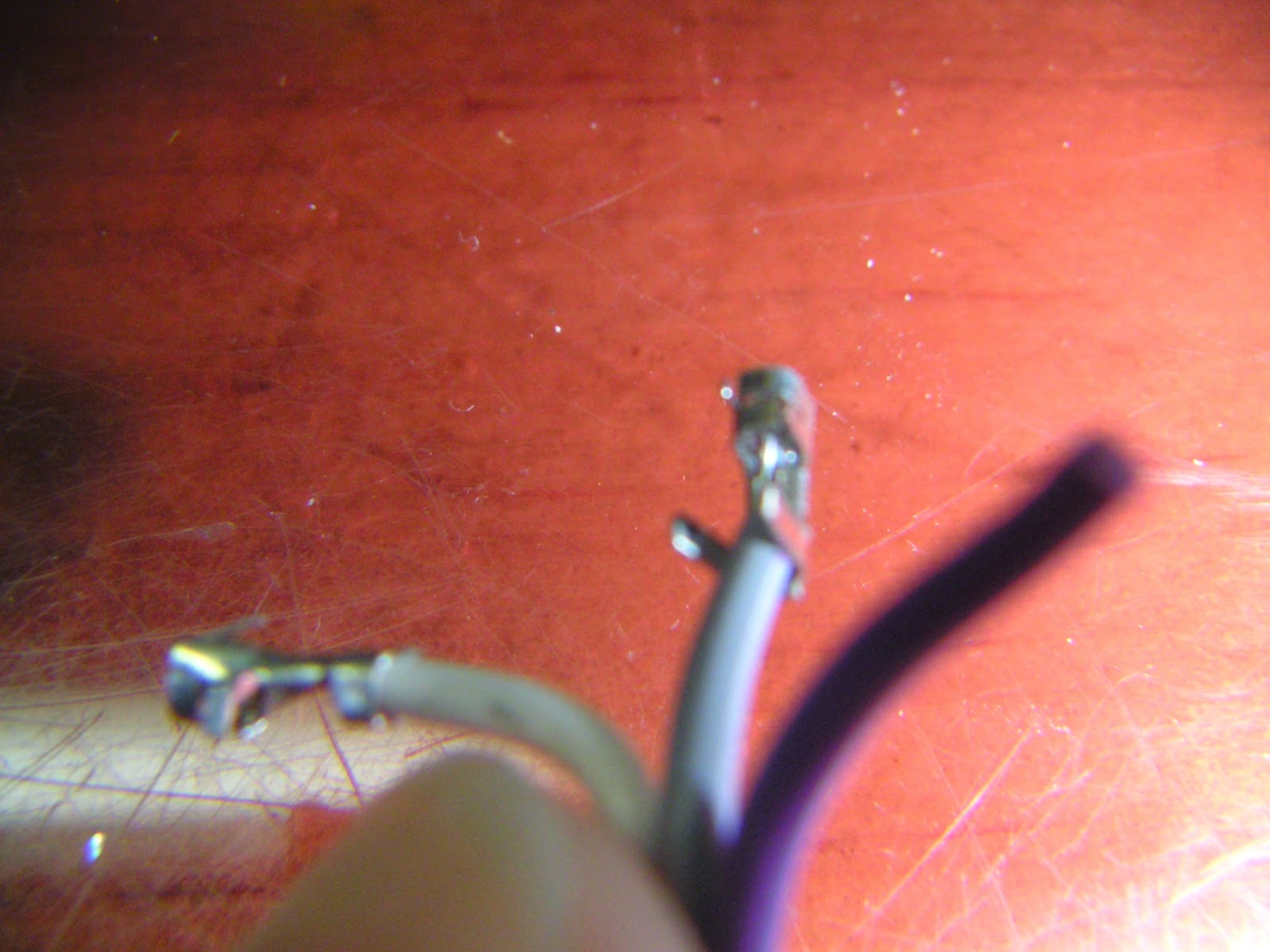
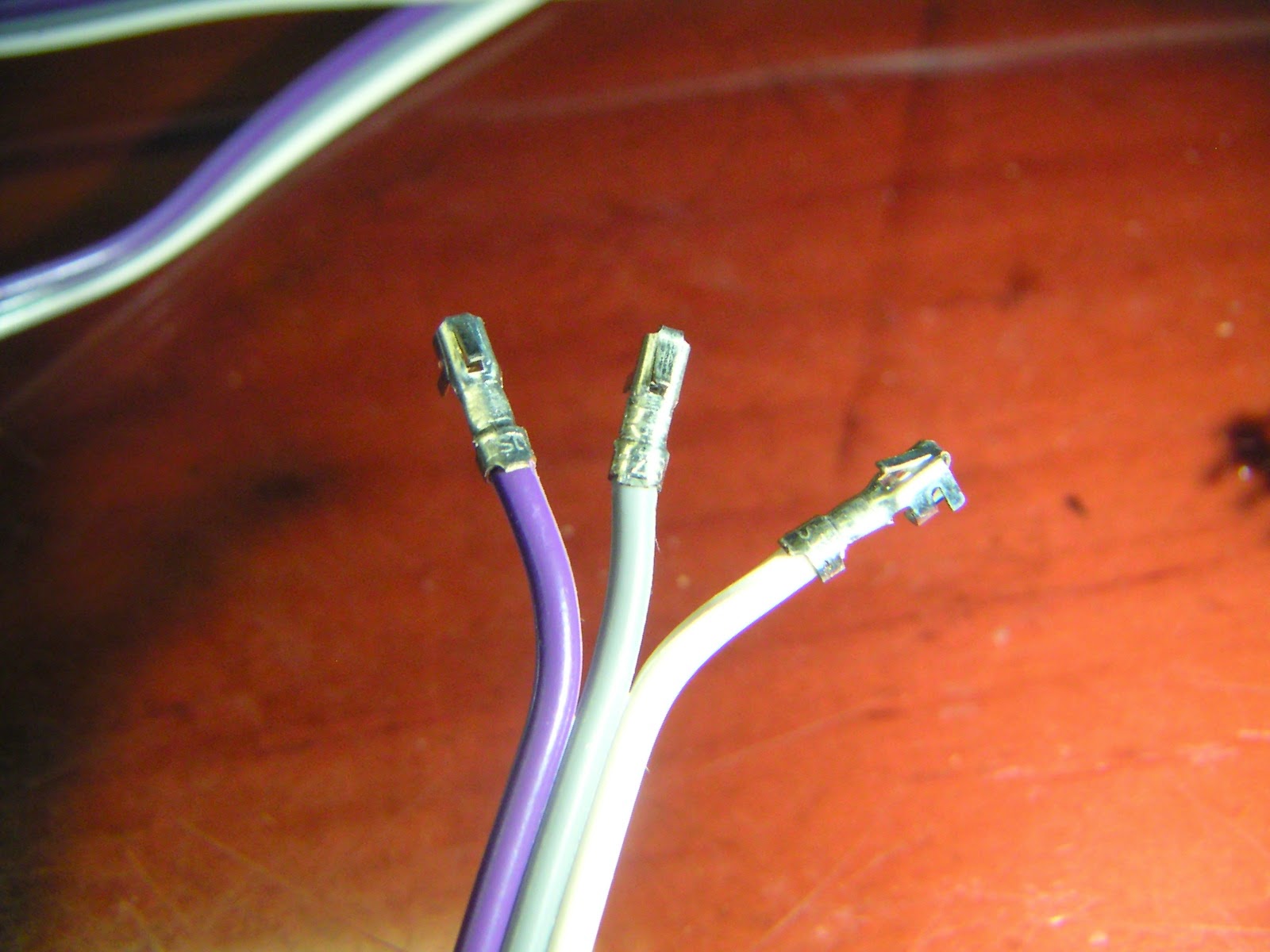
次に被覆押さえをかしめます。

きれいにかしめられると気分が良いです。
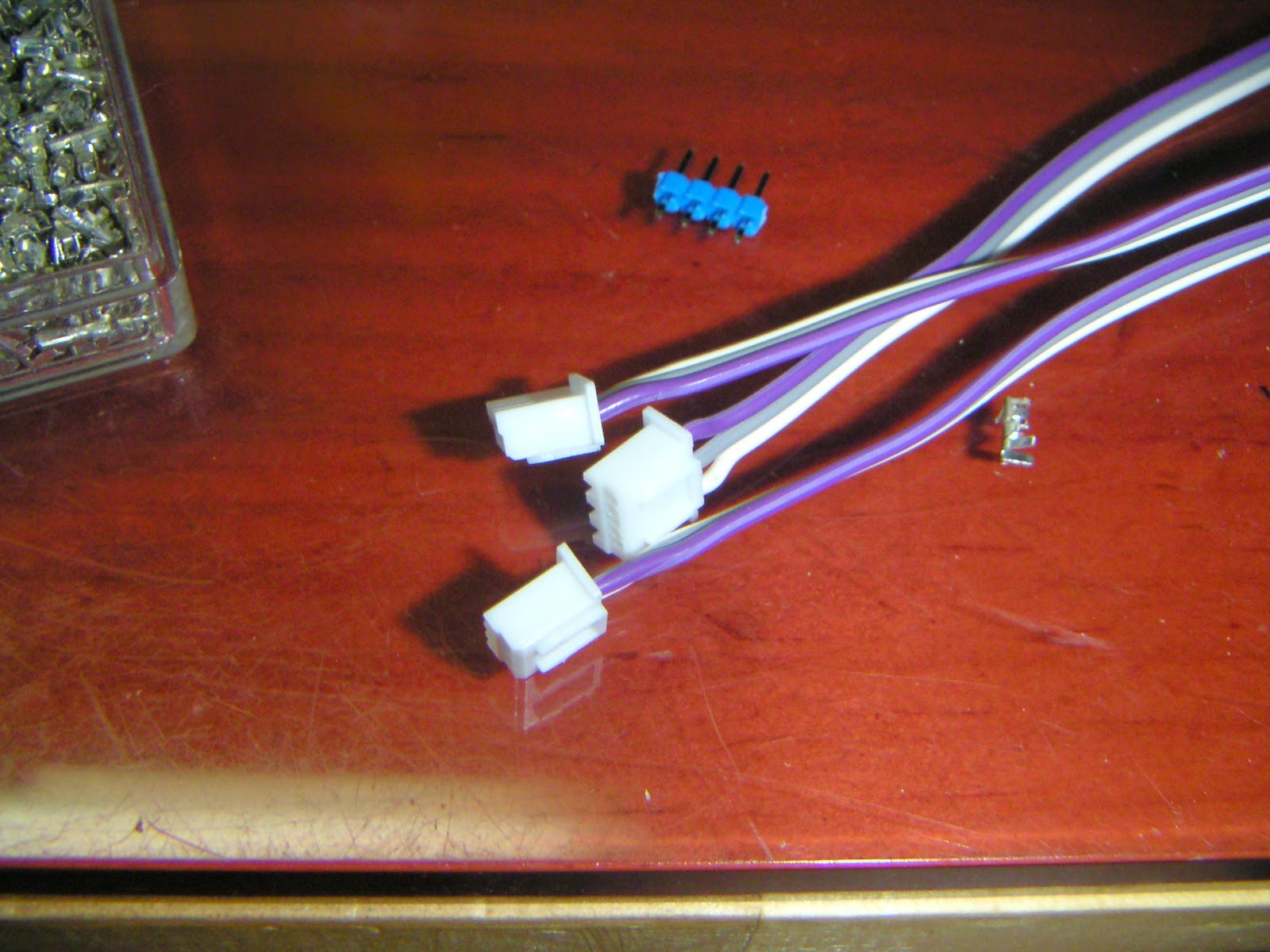
コンタクトがついたら、
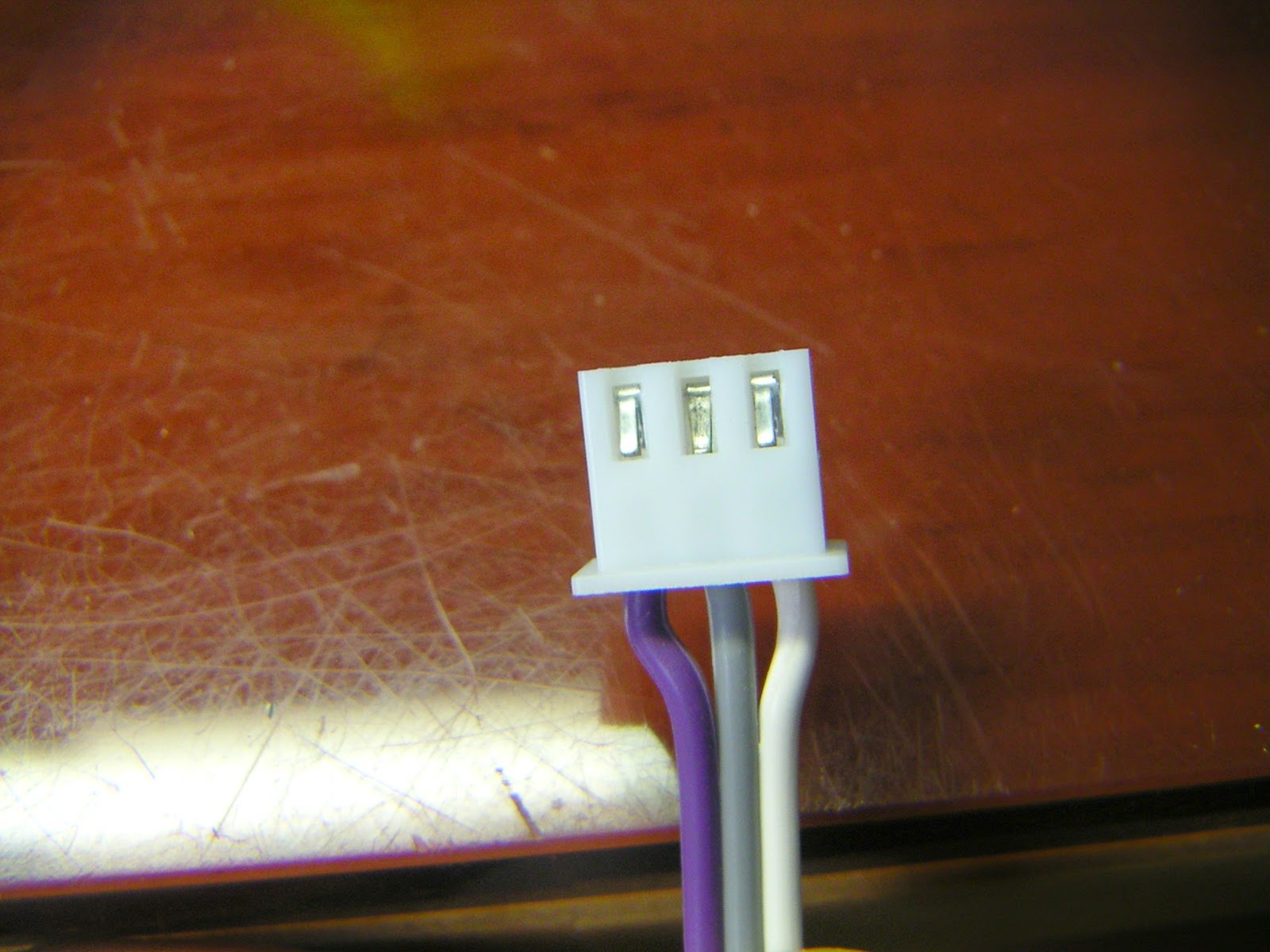
ハウジングに差し込みます。
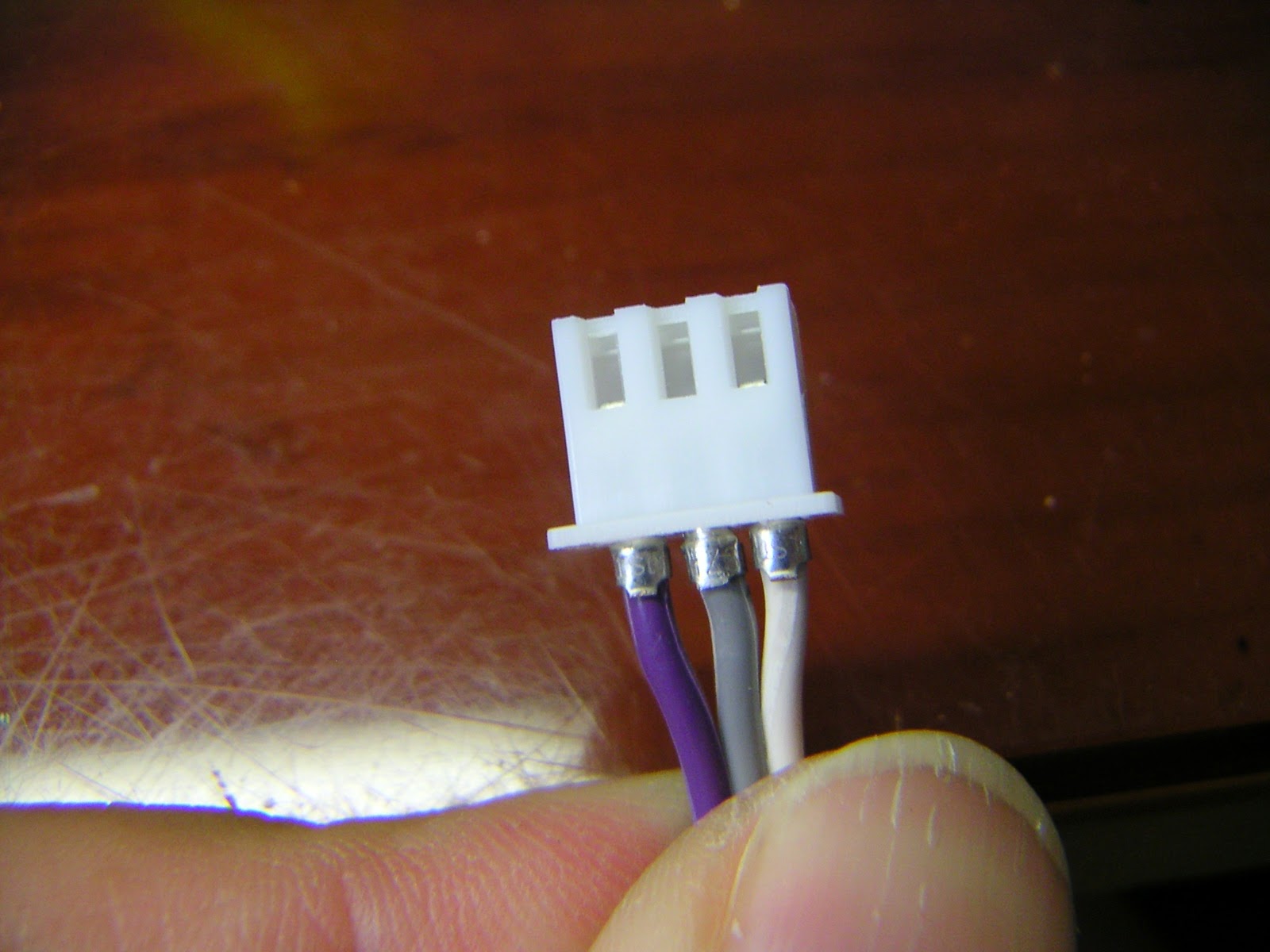
カチッと止まれば出来上がり。
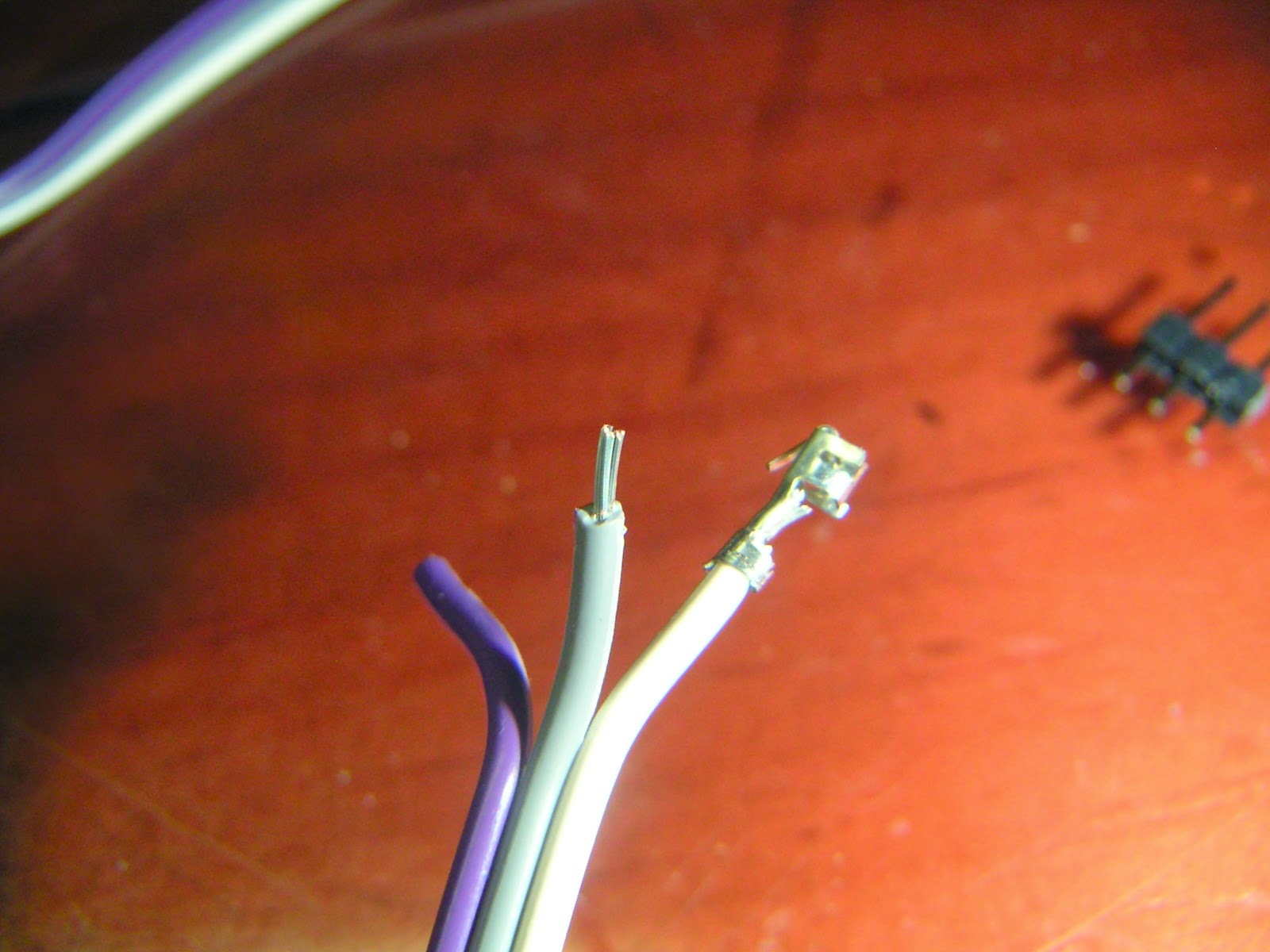
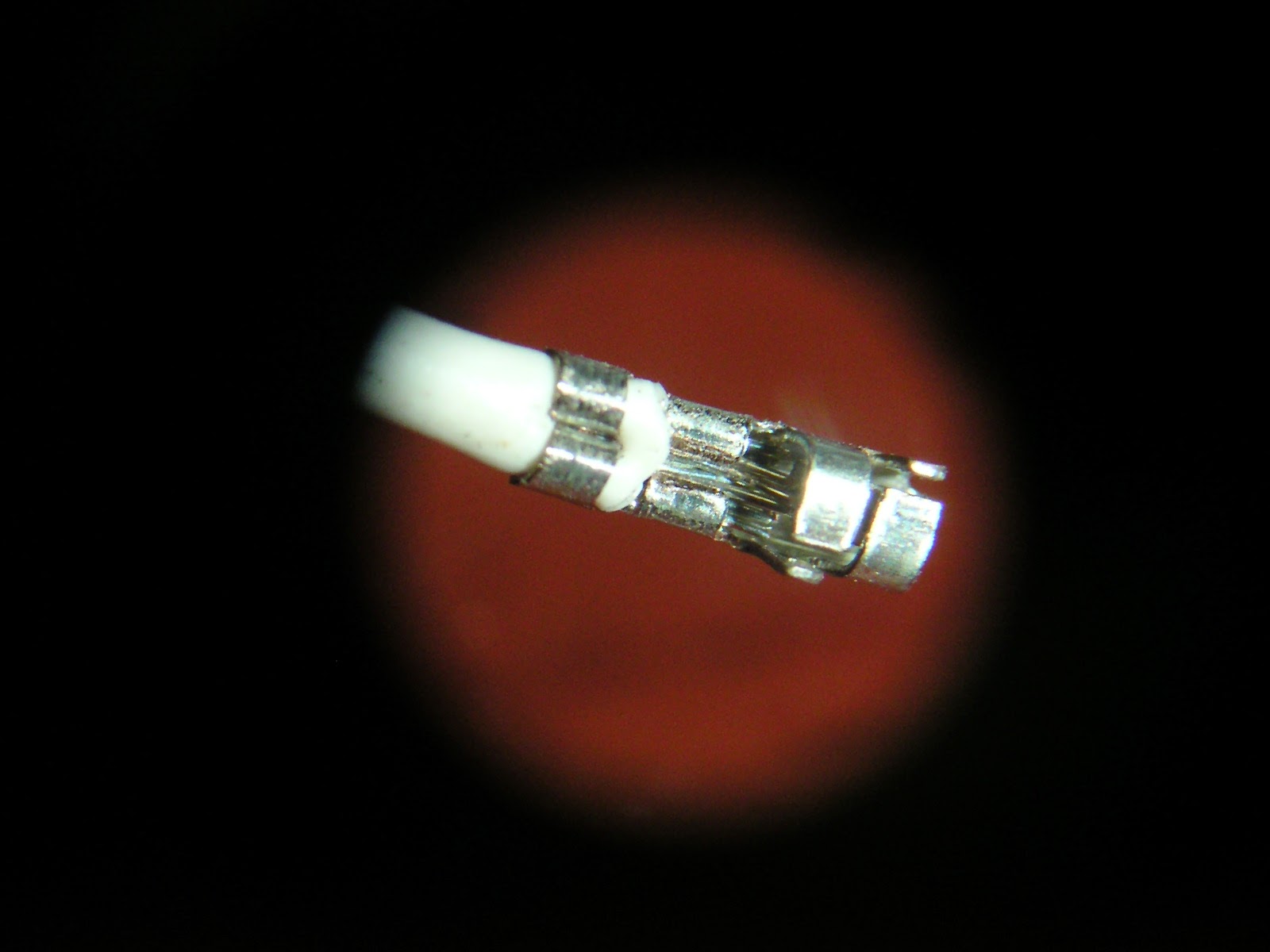
コンタクトの拡大。鈴メッキ芯線とビニル被覆がそれぞれ別にかしめられているのがわかります。
制御用のハーネス完成。
電源用もそれぞれ作製して、
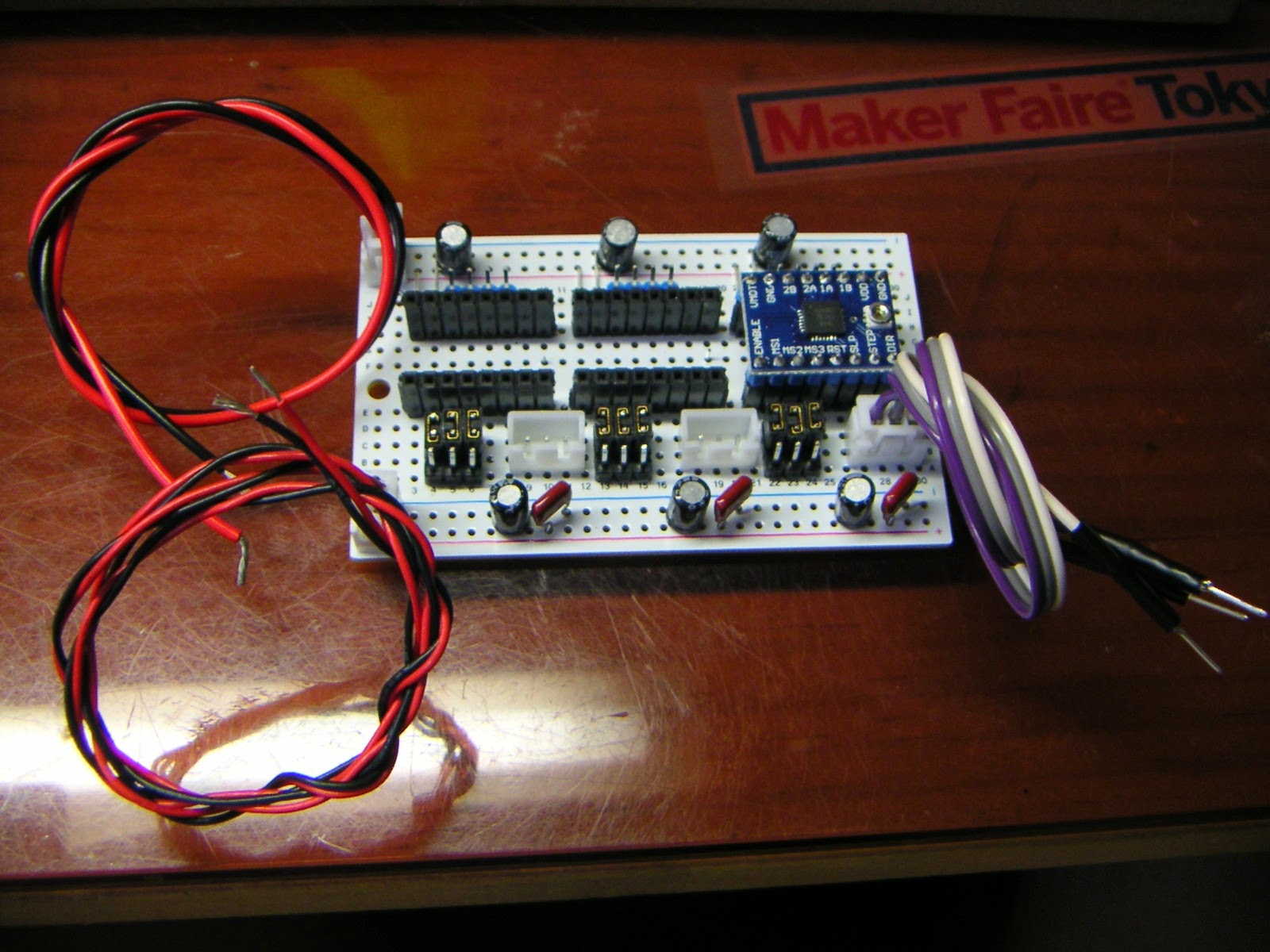
配線してテストです。
ばっちりであります。
三箇所ともテストして配線間違いや抜けがないことを確認して、
完成であります。
基板は5日にお越しいただく池上さんにお渡ししてモータテスト用に使っていただこうと思っています。そのままモジュールを乗せていけば3軸分のコントロールが出来るようになります。