grblが動いているっぽいので、ドライバ基板を作っていきます。
シールド基板の上にドライバを作って、Arduinoに乗せることも考えましたが、ずいぶんと窮屈な仕上がりになりそうだし拡張性も捨てることになりますので、別基板とすることに。
基板入れを引っ張り出してきて..
この辺ですかね。
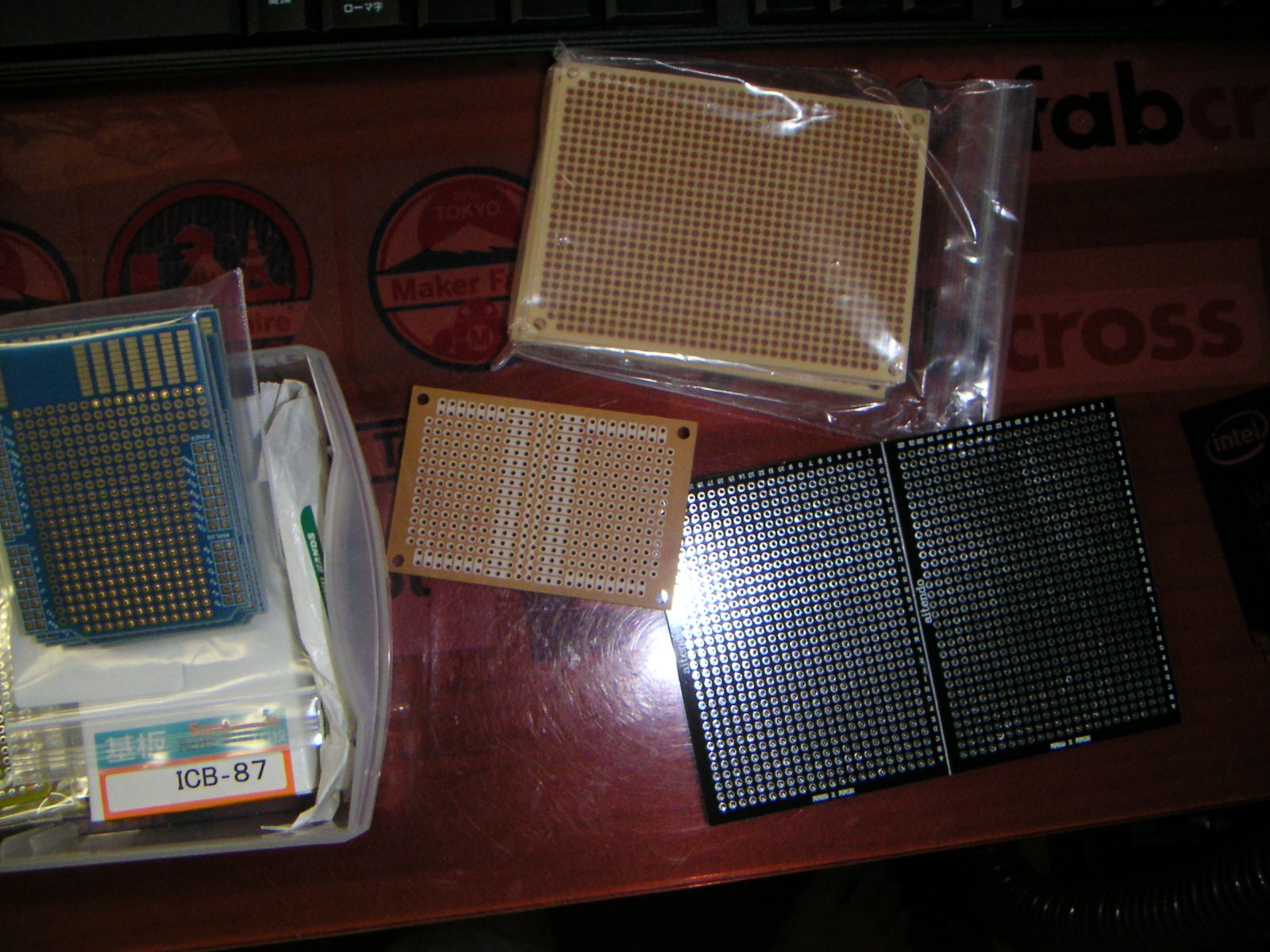
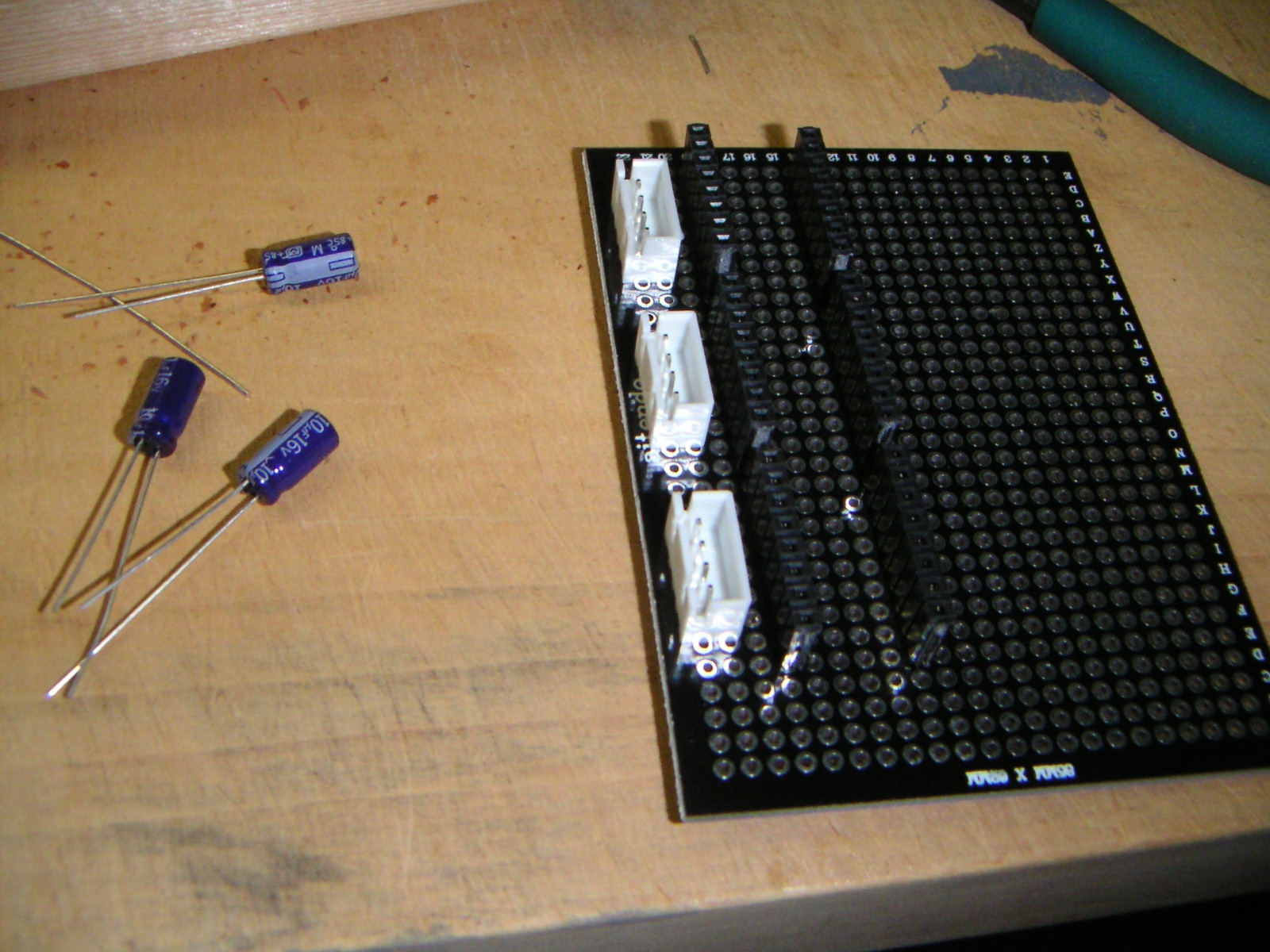
右下のAitendoユニバーサル基板がちょうどよさそうなので、これにします。黒くてかっこいいし、スルーホールなのでいろいろ捗るかもしれません。
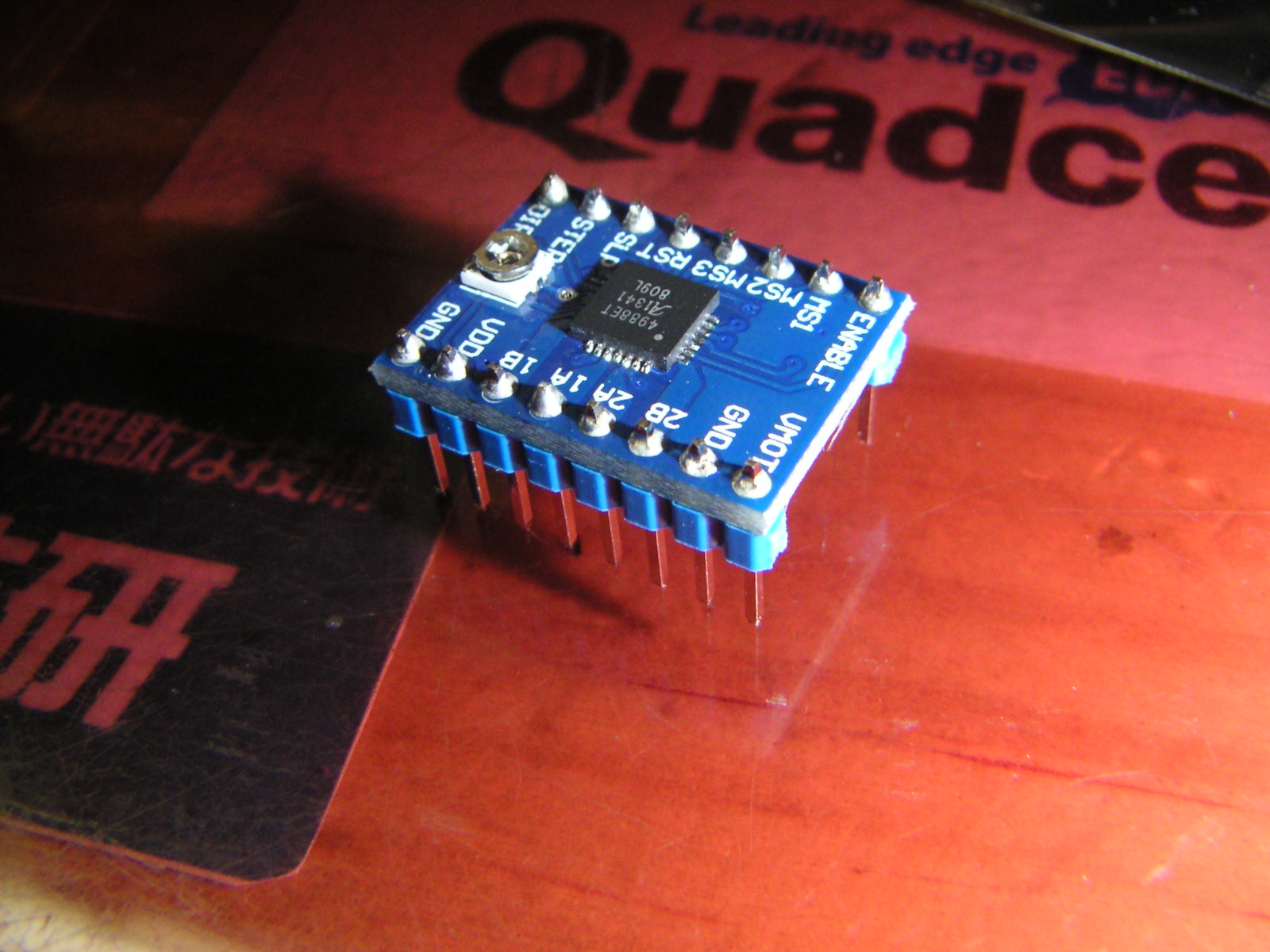
ドライバはいつものA4988が乗ったモジュールを使います。
たくさん持っているつもりでしたが、今日数えたらあと29枚になってました。

モジュールにピンヘッダつけます。
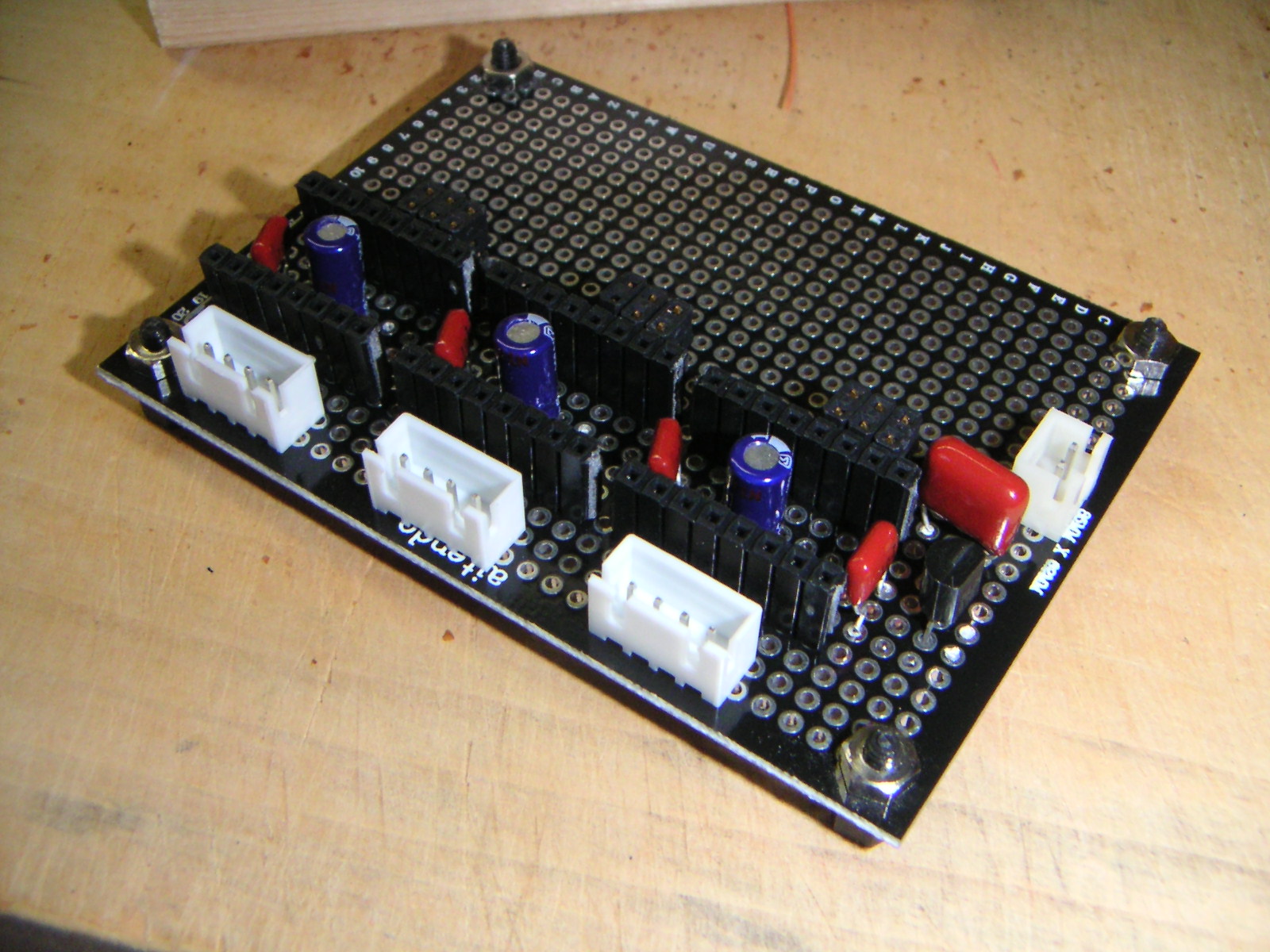
レイアウトを考えながら基板にピンソケットやらコネクタらや半田付けしていきます。
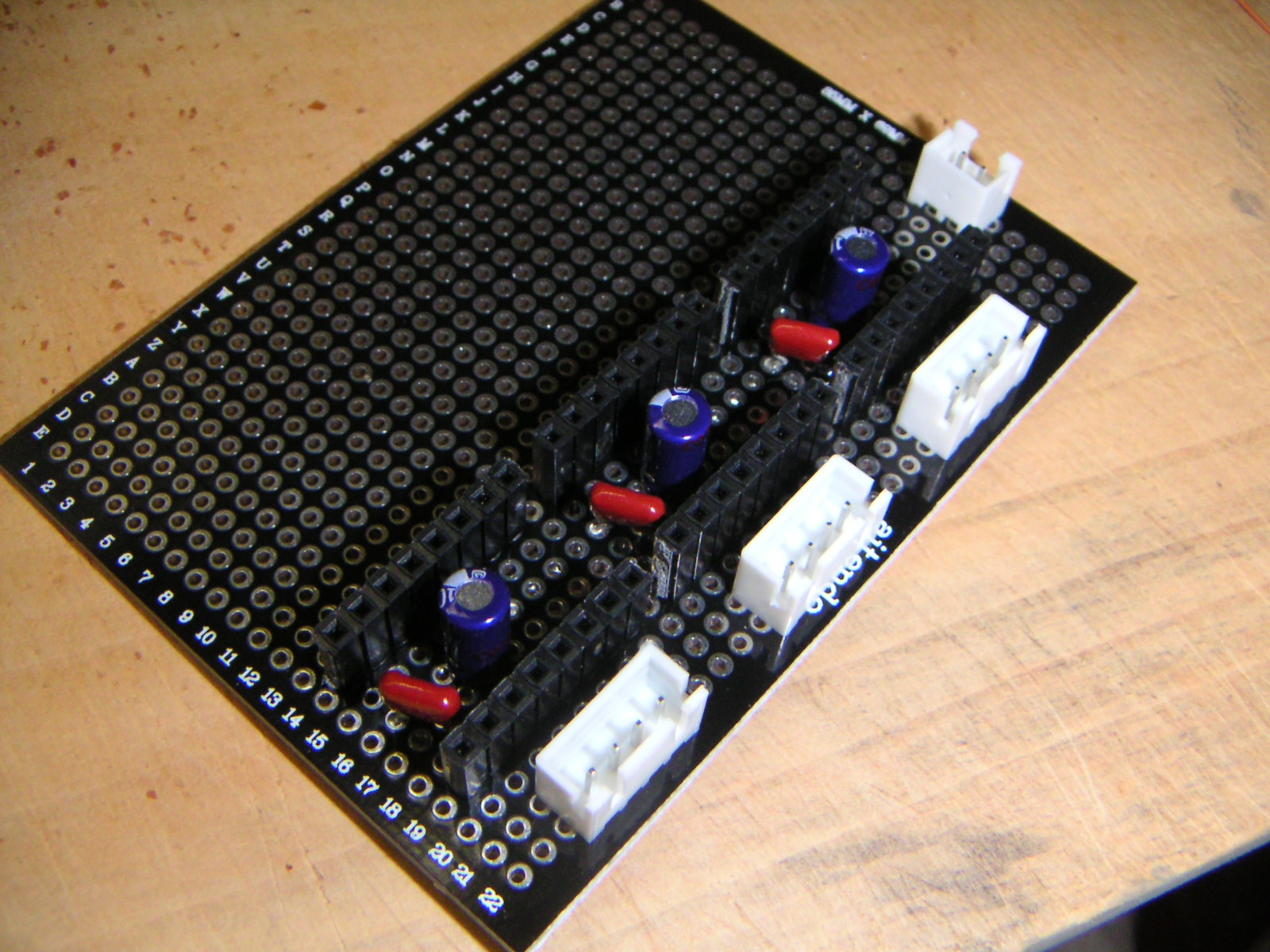
ロジック電源にいちいちノイズ対策を。
なんという無駄なつくり。
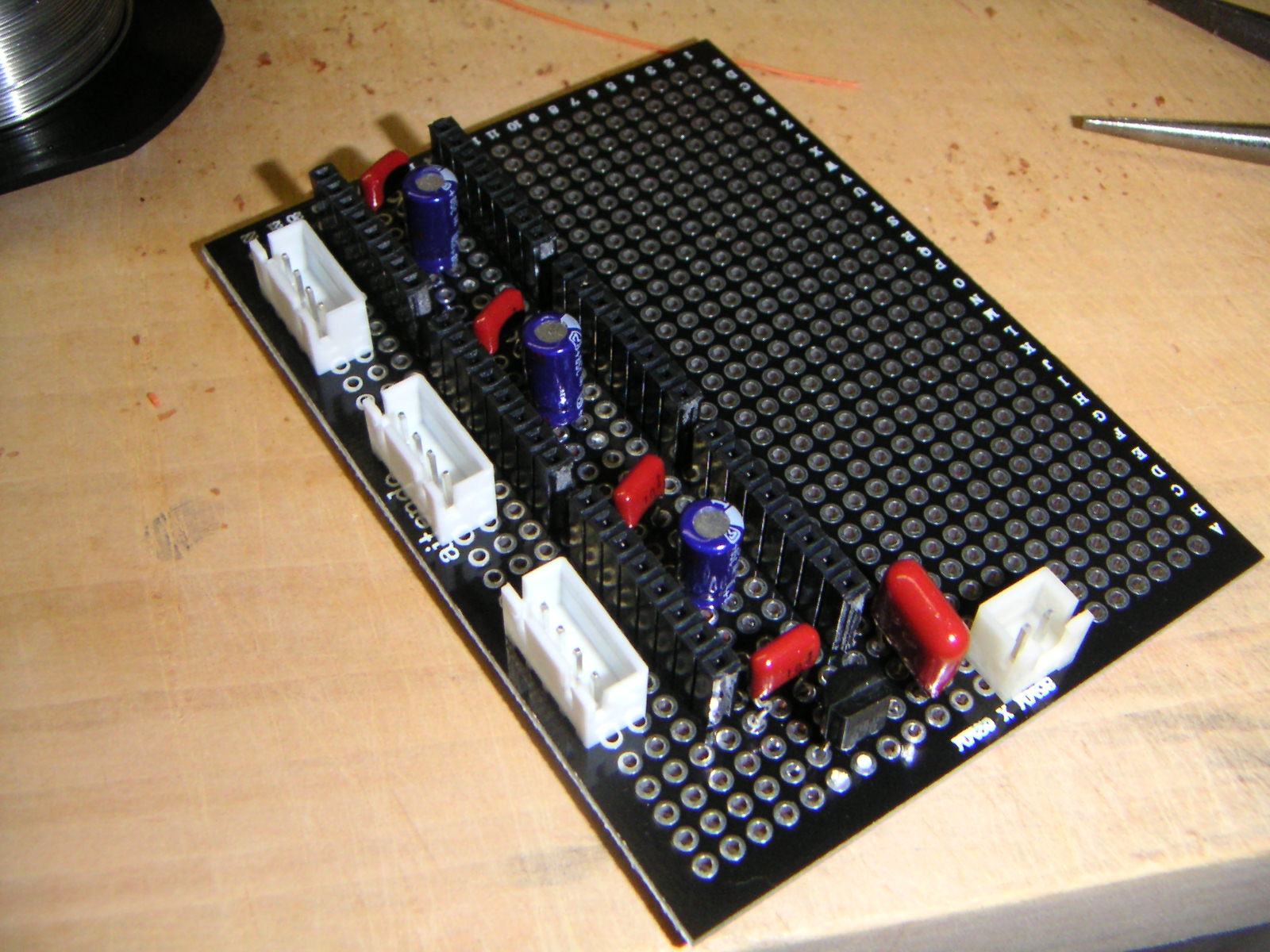
モータの入力は12Vとする予定ですので、7805で落とした5Vを4988のロジックに使うことで電源周りをシンプルにします。
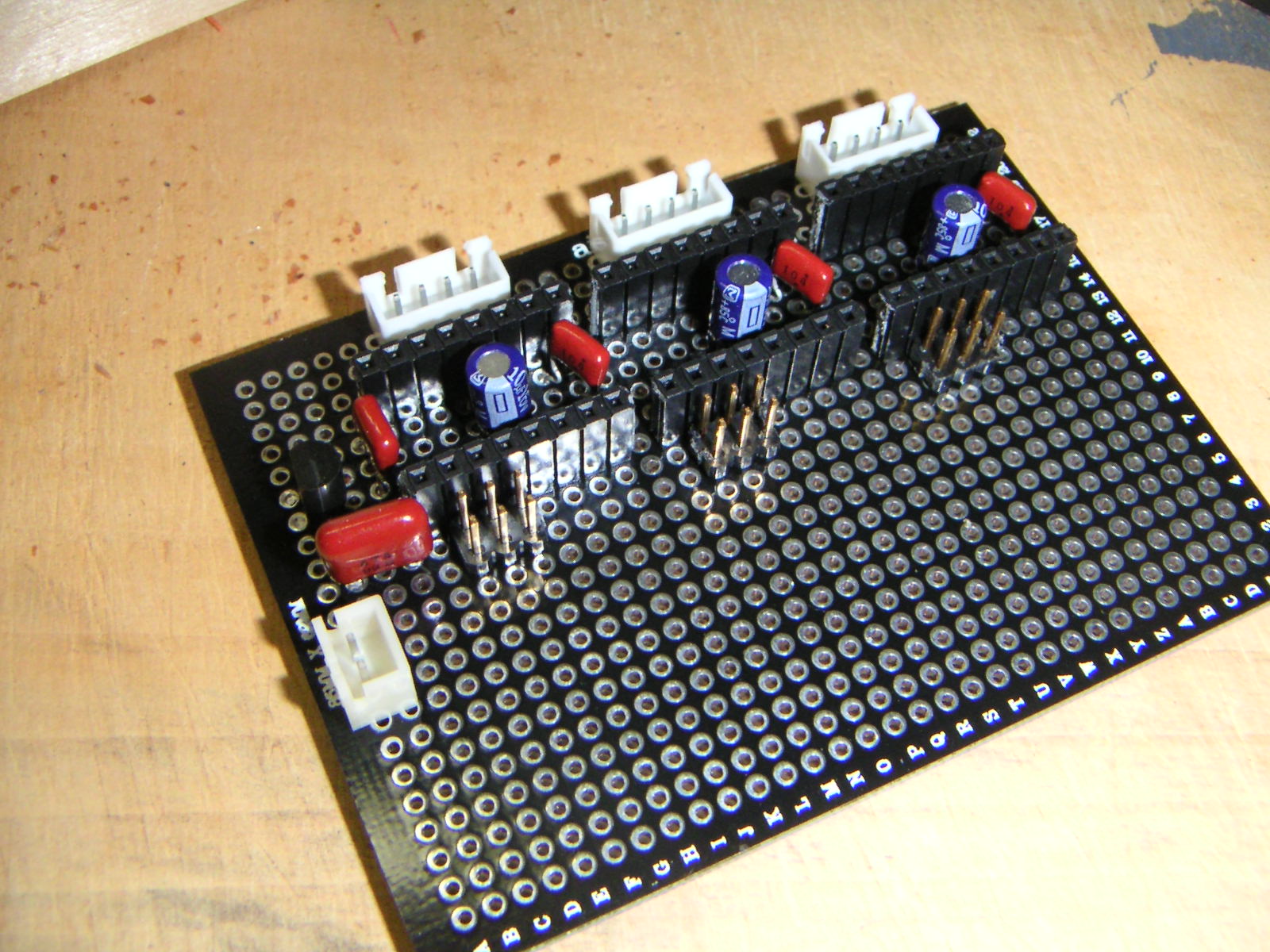
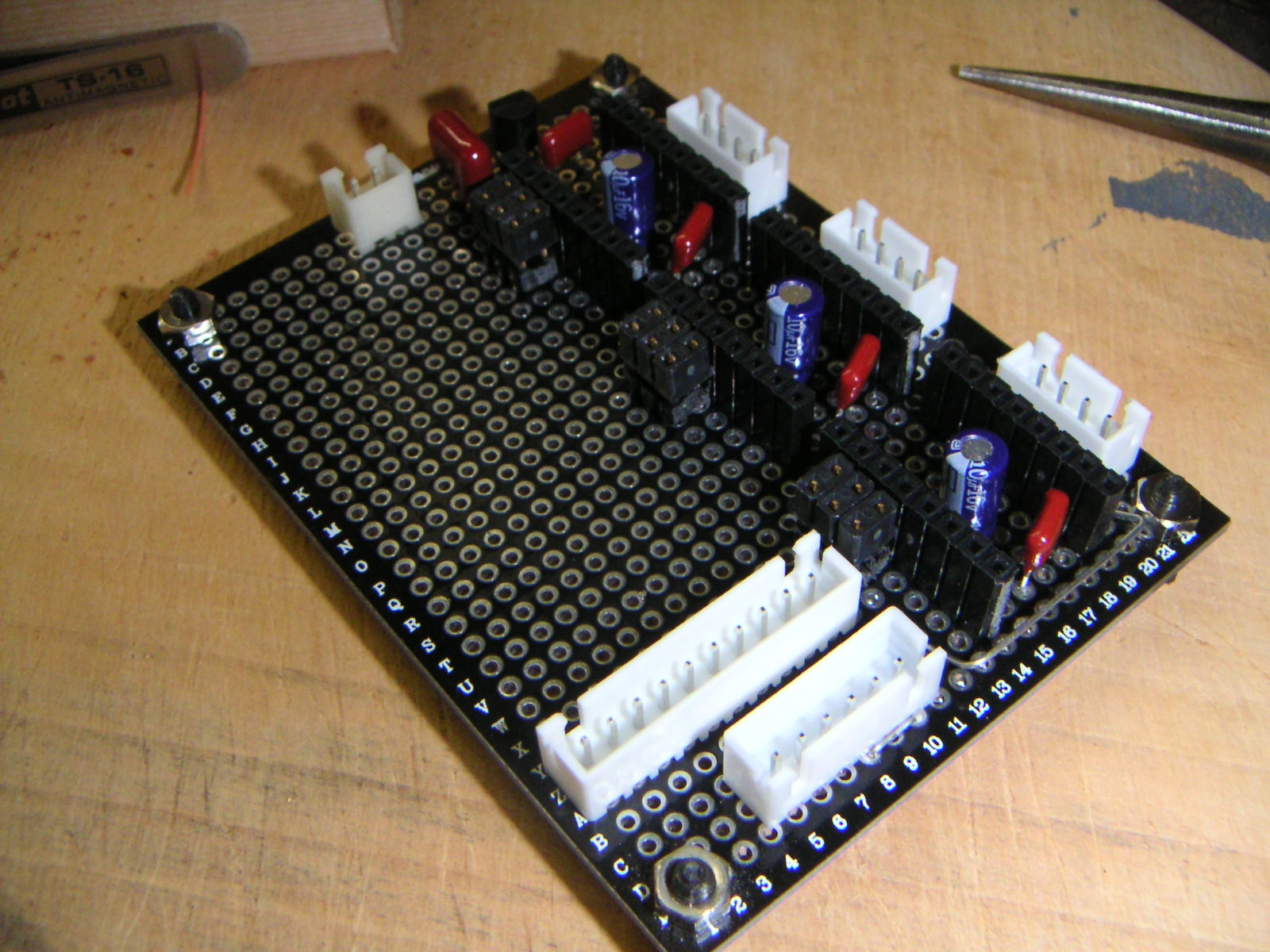
マイクロステップを定義するピンヘッダをつけます。1/16固定での動作になると思いますが。
四隅に穴あけて高ナットを取り付けます。
これで基板裏面のショートを防ぎます。
Arduinoと通信するための配線を行うコネクタを作ります。手前の6ピンはリミットスイッチを接続するため、右奥の4ピンx3はモータ、もっとも奥の2ピンは電源です。
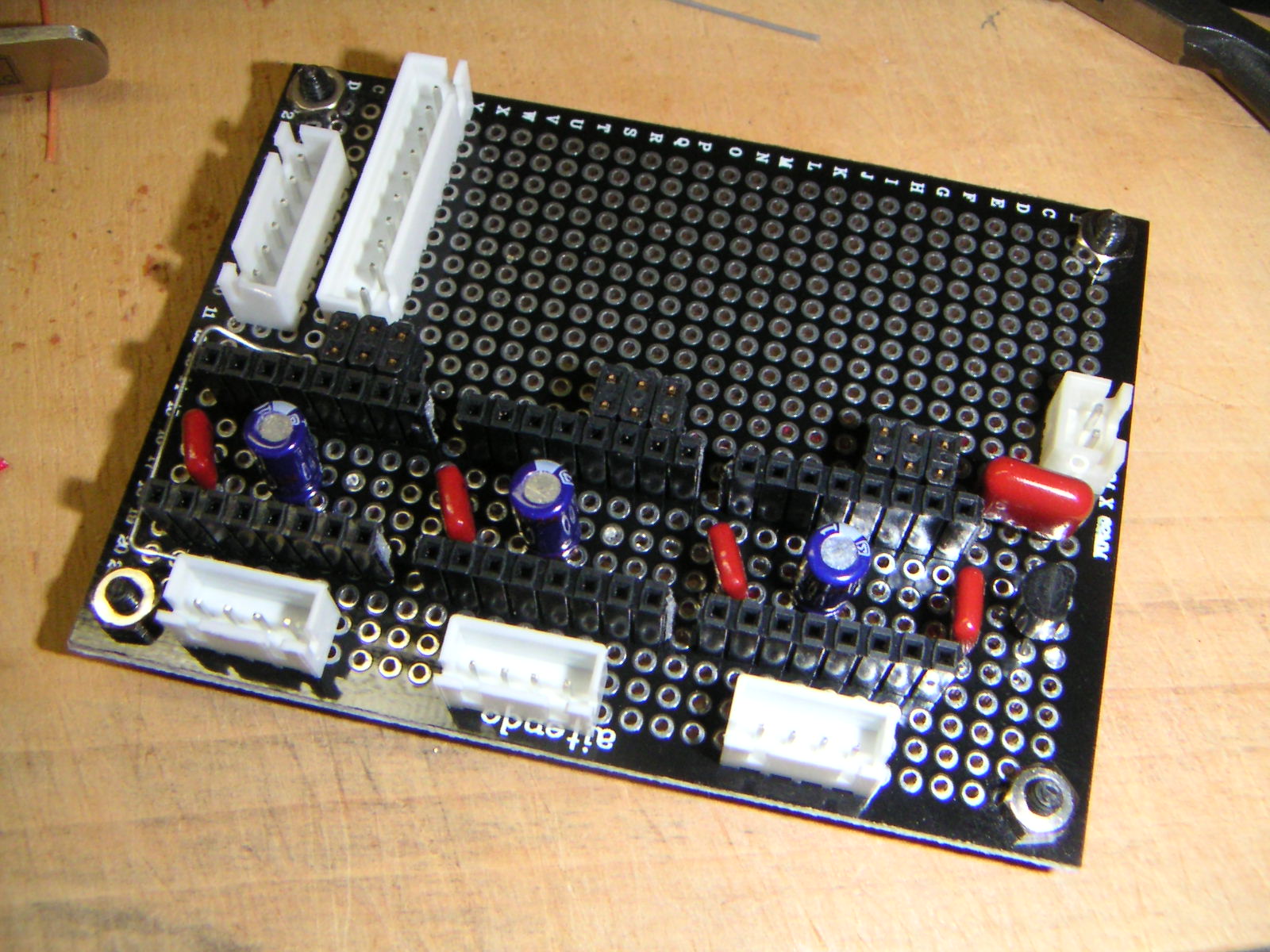
配線完了。
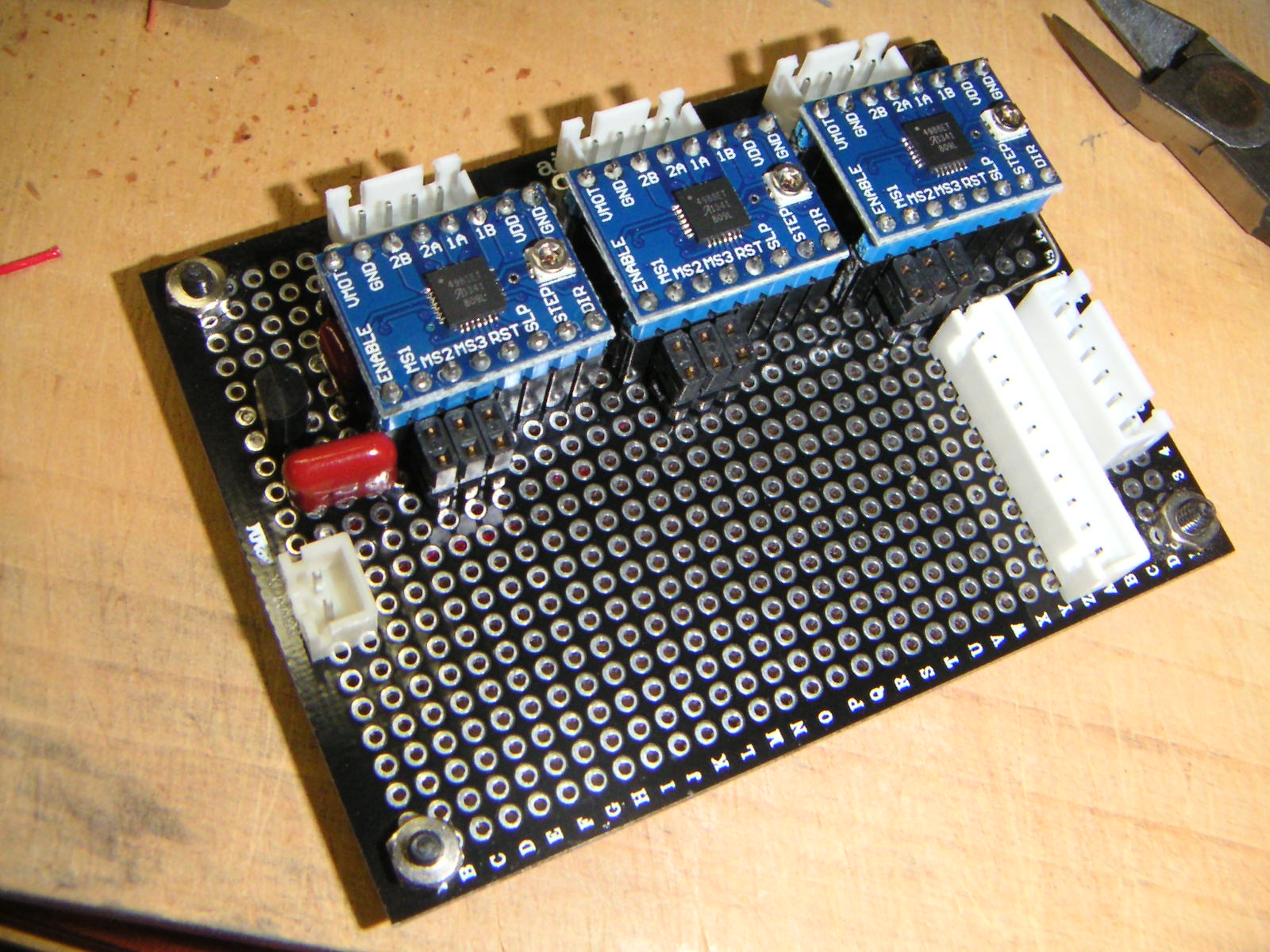
モジュール乗せるとこんな感じになります。
手前の広く開けた部分は将来的にArduino mini でも乗せようかなと考えております。
舞台裏。あんまりじろじろ見てはいけないところです(笑
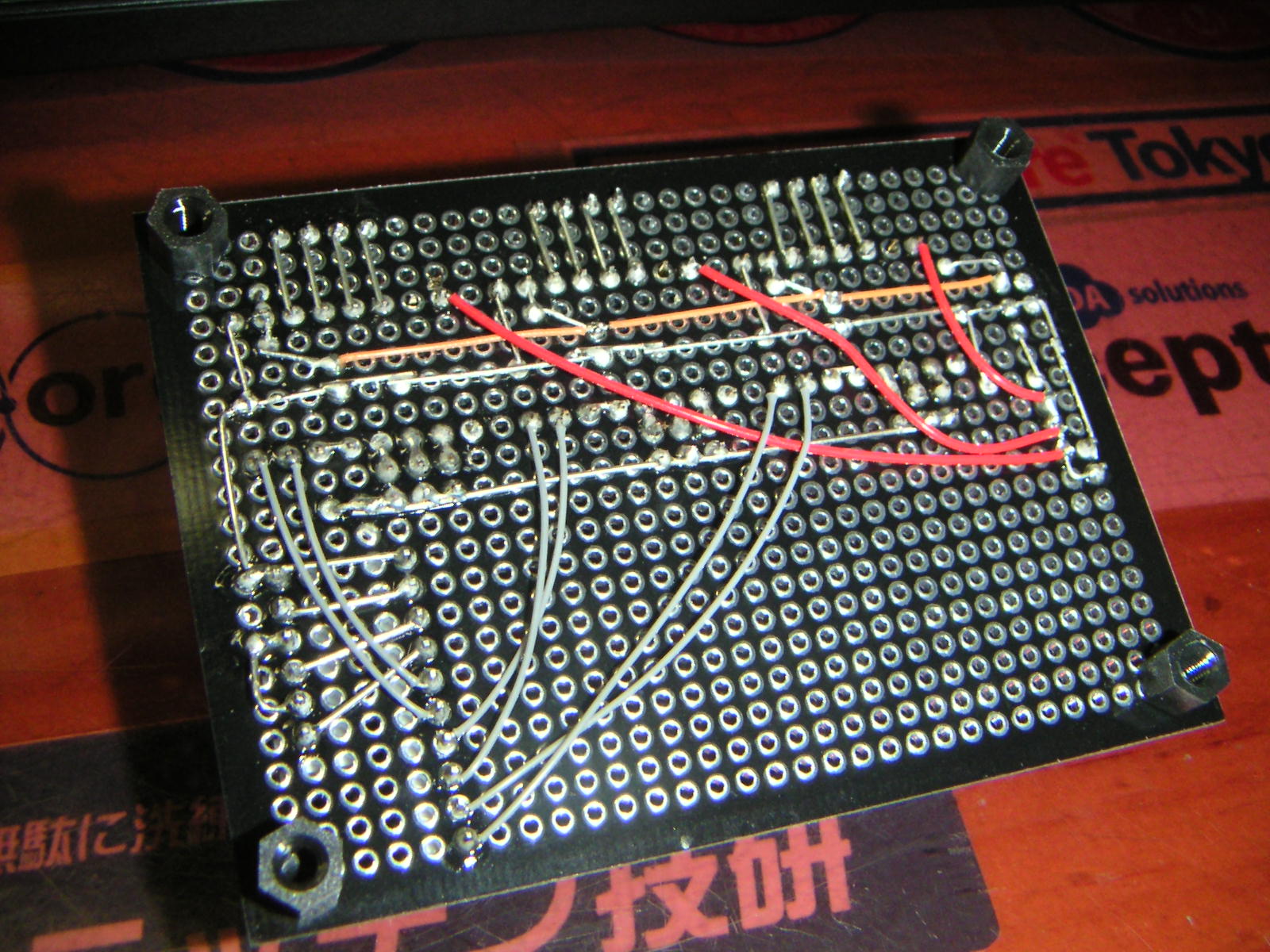
配線チェック後、動作テストを行います。