ドライバ基板の作製を続けます。
基板上の配線は終わっていますので、コネクタ周りからです。
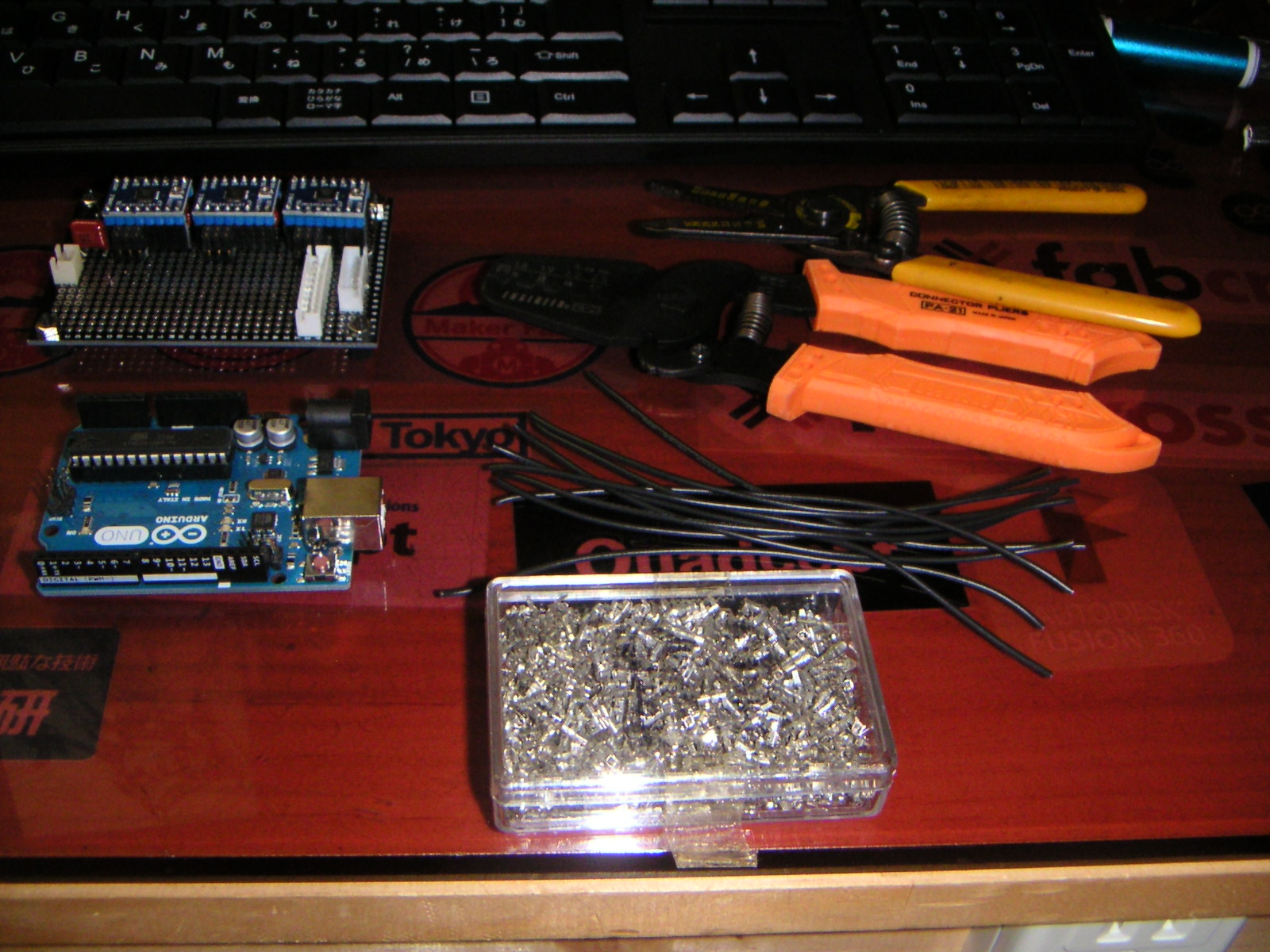
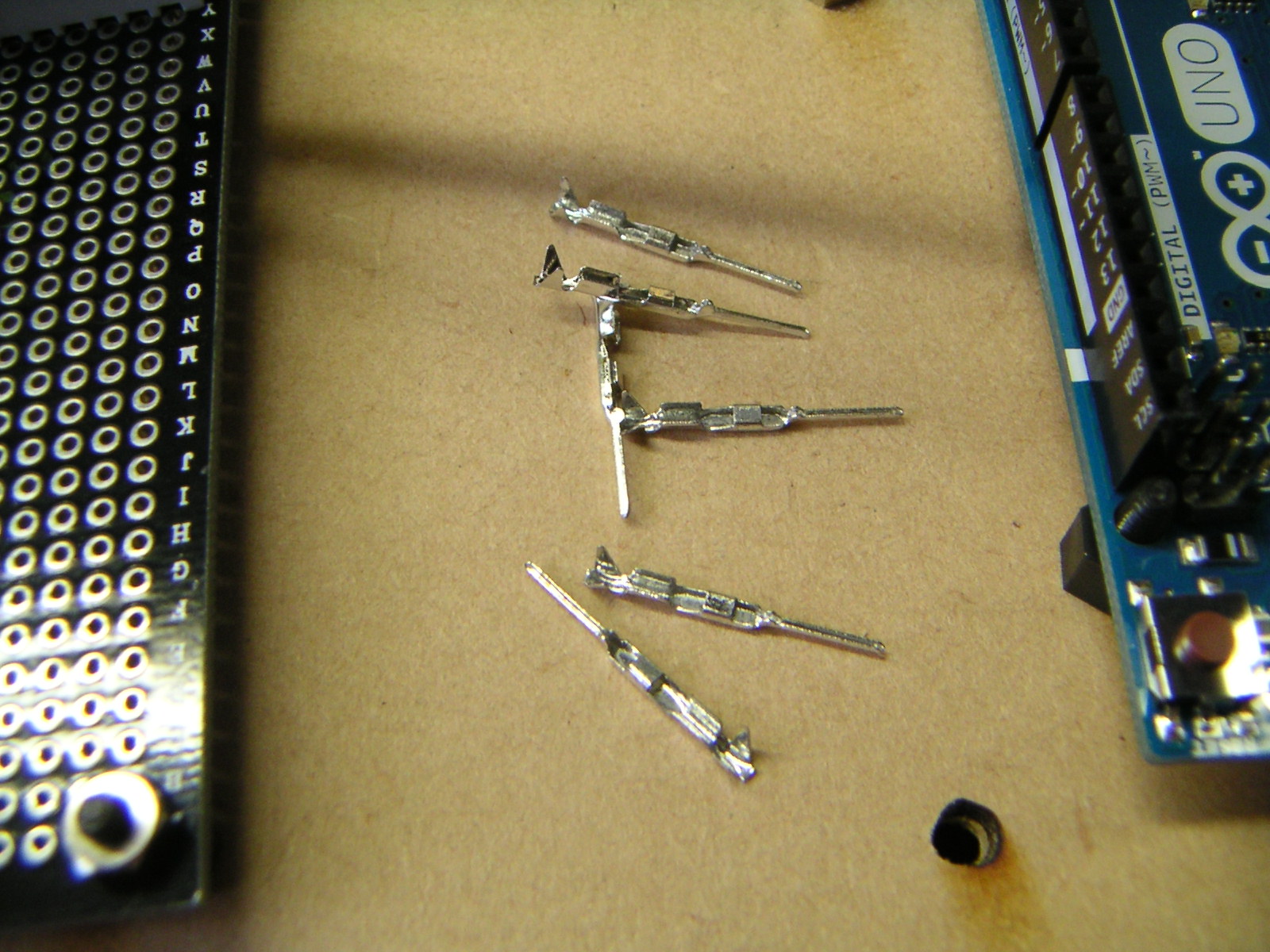
配線材を準備して、
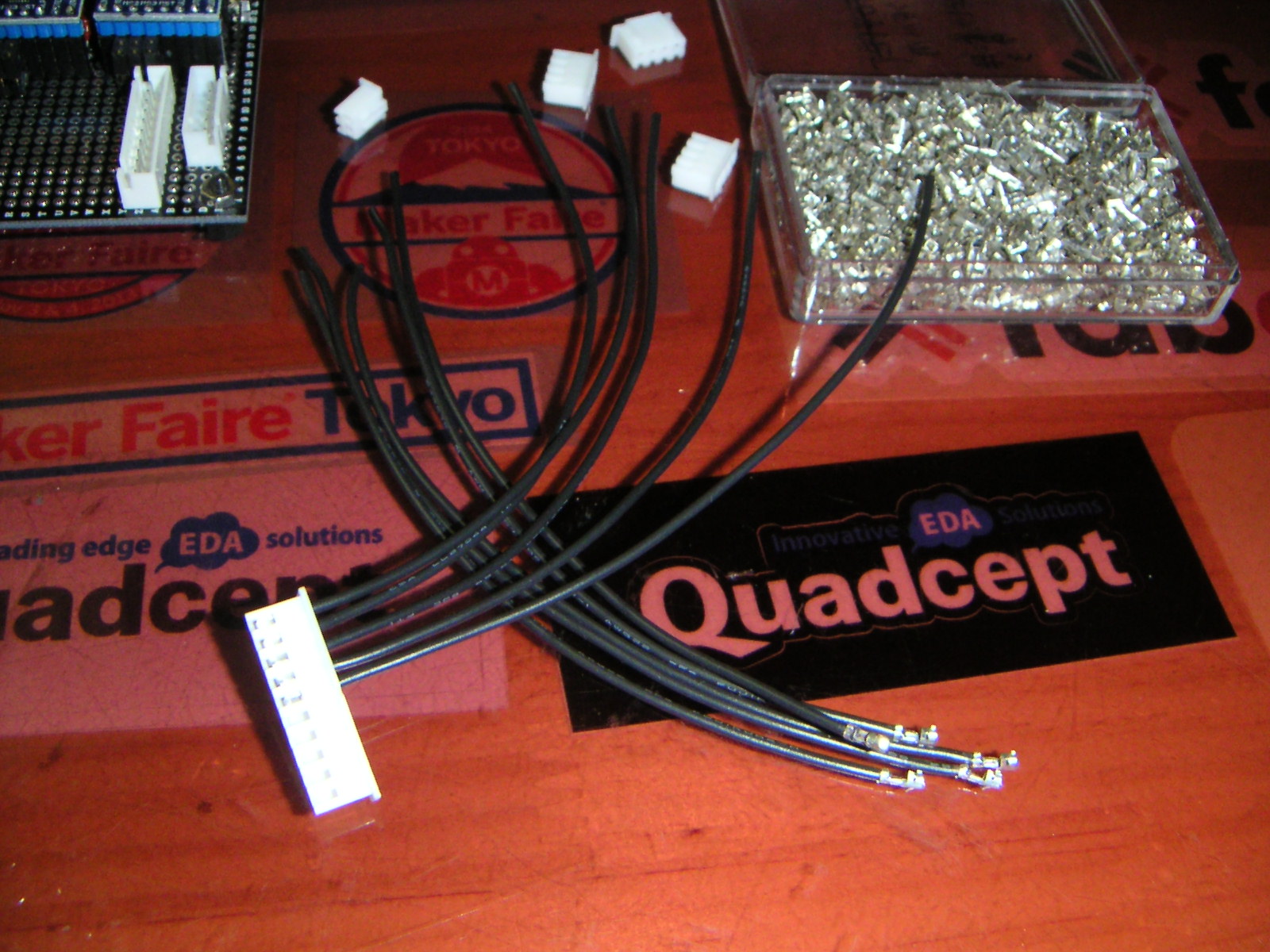
コネクタピンを圧着していきます。まずはXHコンタクトから。
コネクタつくりはほんと楽しいです。
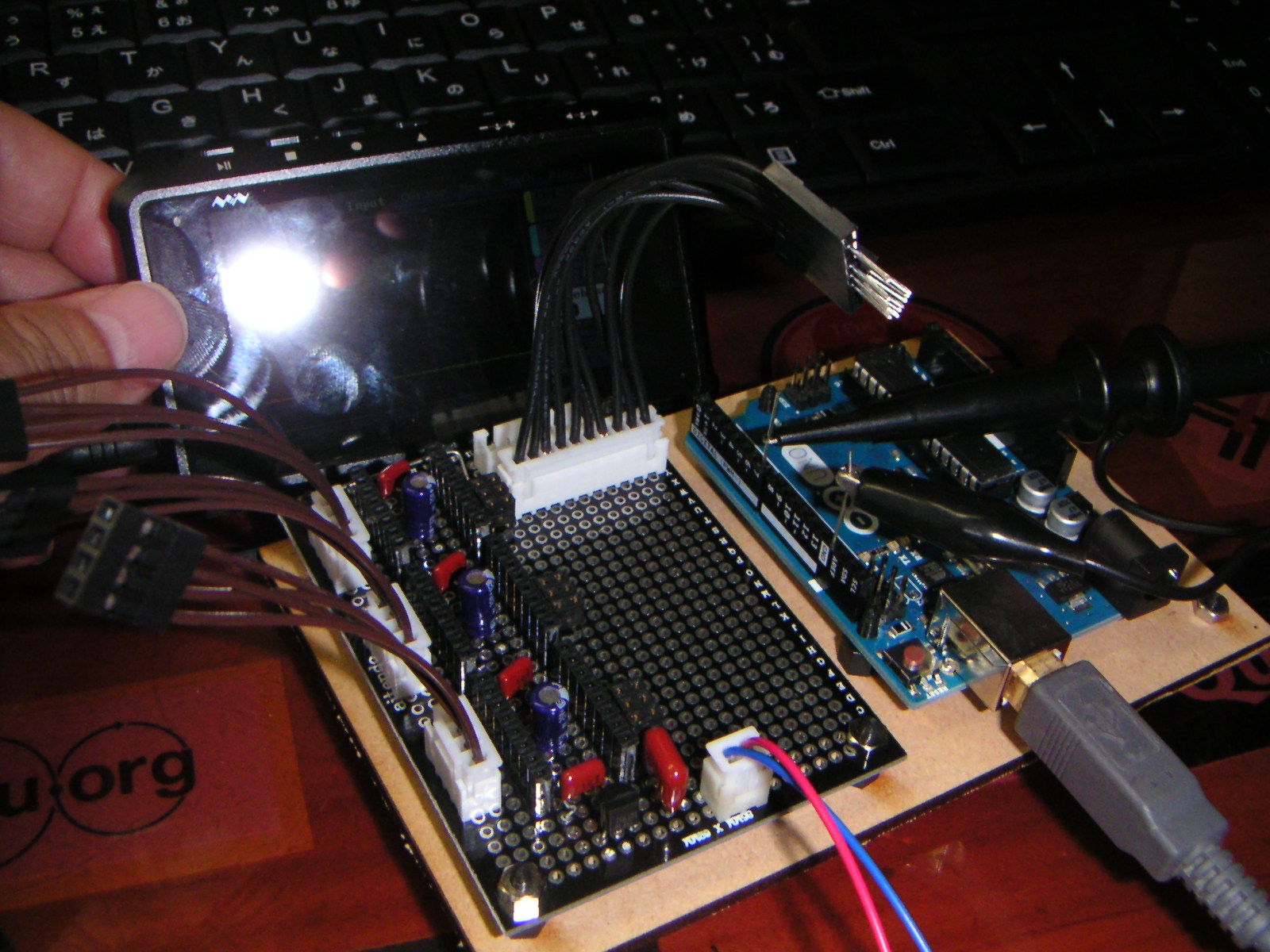
Arduinoとの接続配線が出来ました。
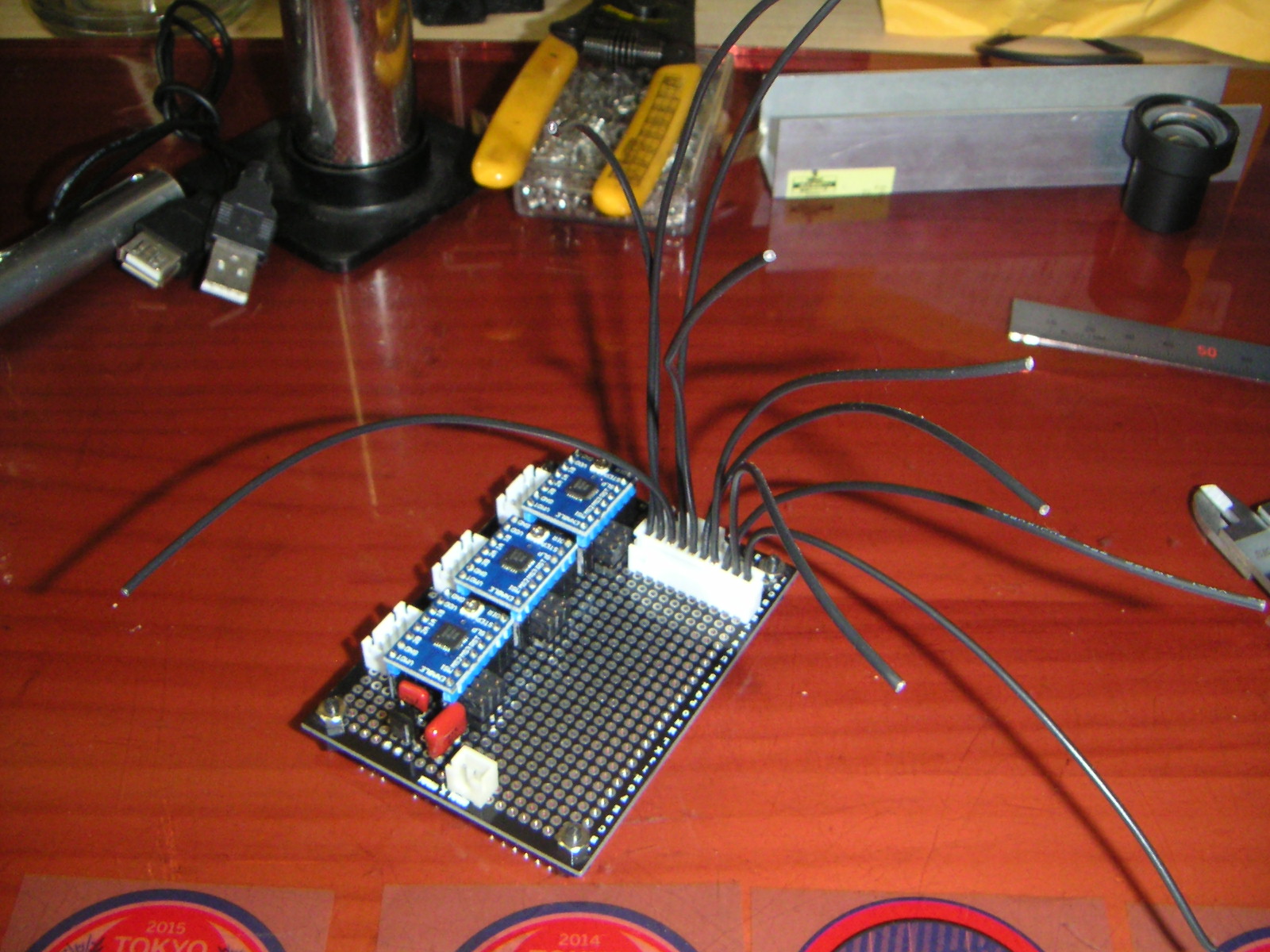
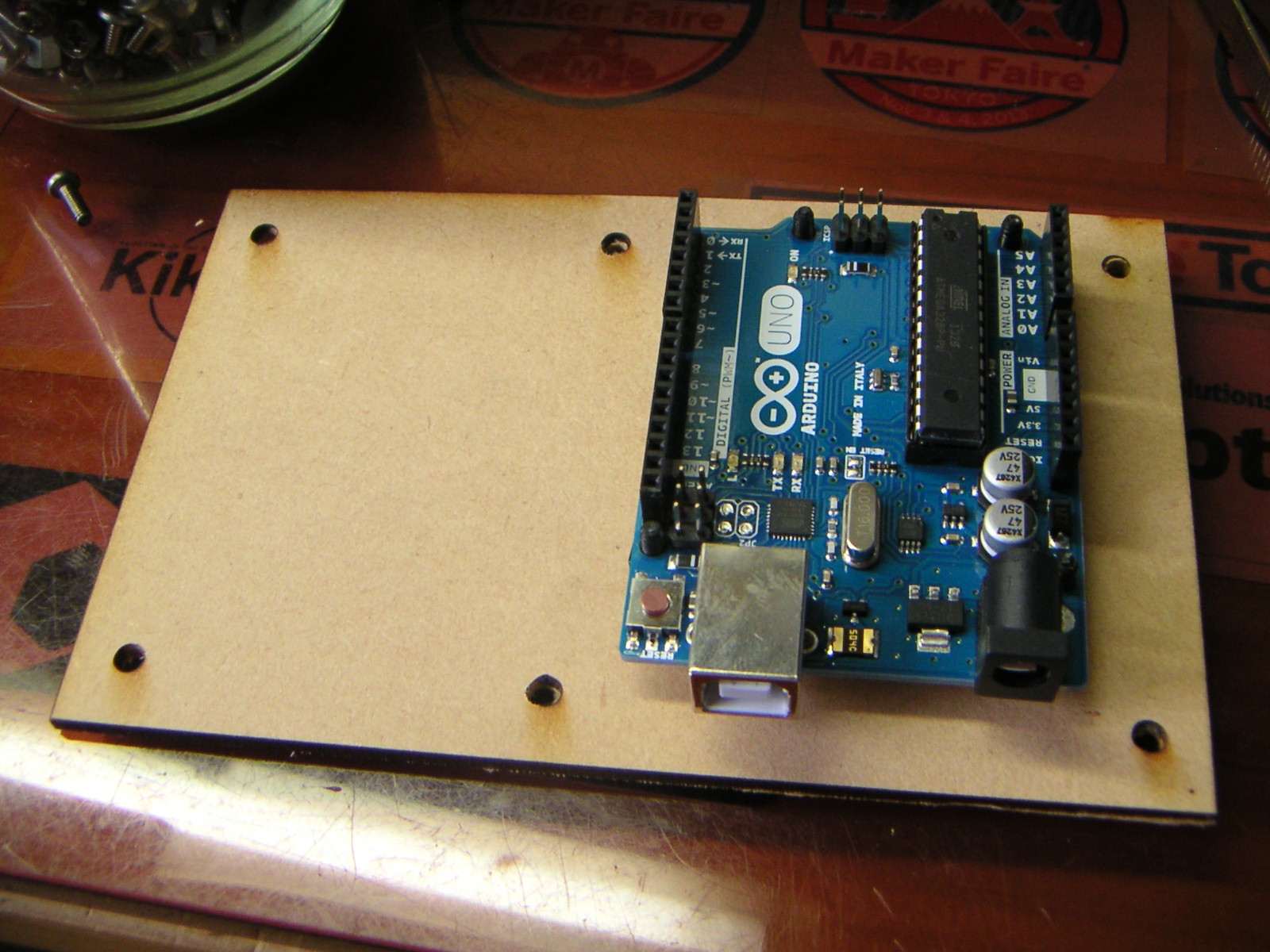
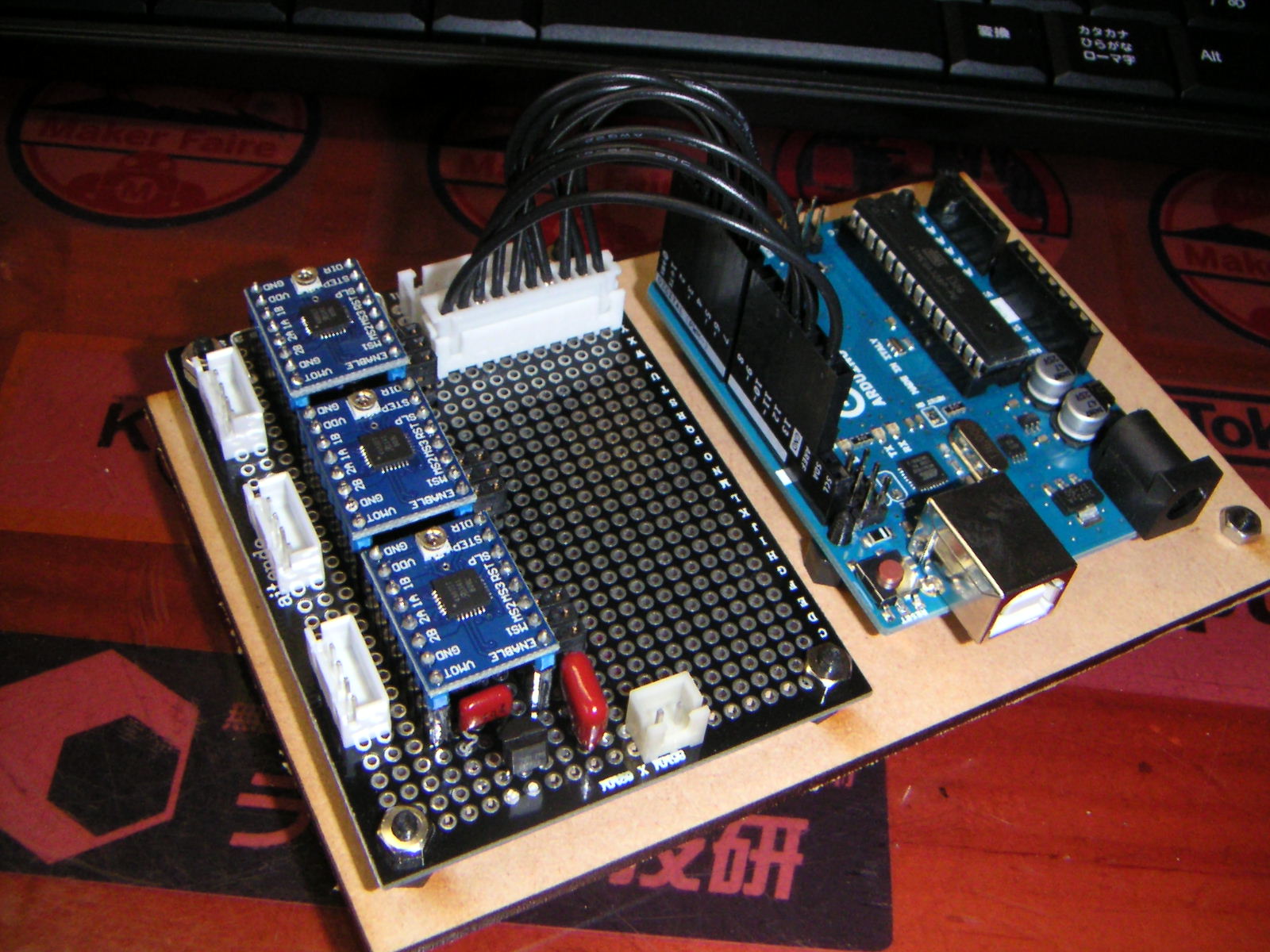
ここで、作っている基板とArduinoをきれいにまとめるために、一枚の板の上に乗せることにしました。
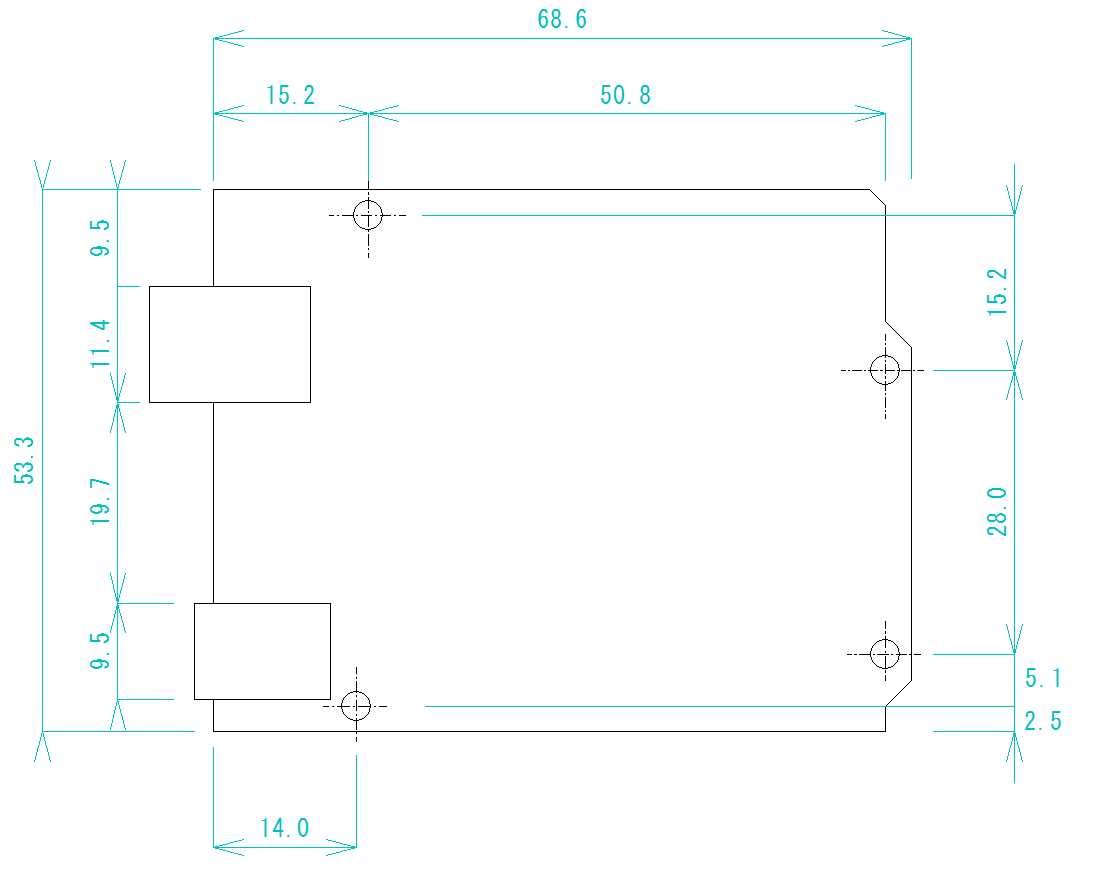
が、Arduinoの穴位置は変則的です。おまけに図面も見つけられませんでした。
ので、この機会にMake: のこの記事から下記の図面を作りました。
元図はinch単位の座標表示になっておりますので、それをmmに換算しました。若干の誤差がありますが、自分の工作精度を考えると何の問題もないと思いますので適当に四捨五入しています。
んで、ドライバ基板と共に乗せられるような板をjwCADで描いて、レーザカッターで切り出しました。
こちら。
Arduinoを乗せるためのピンを立てます。
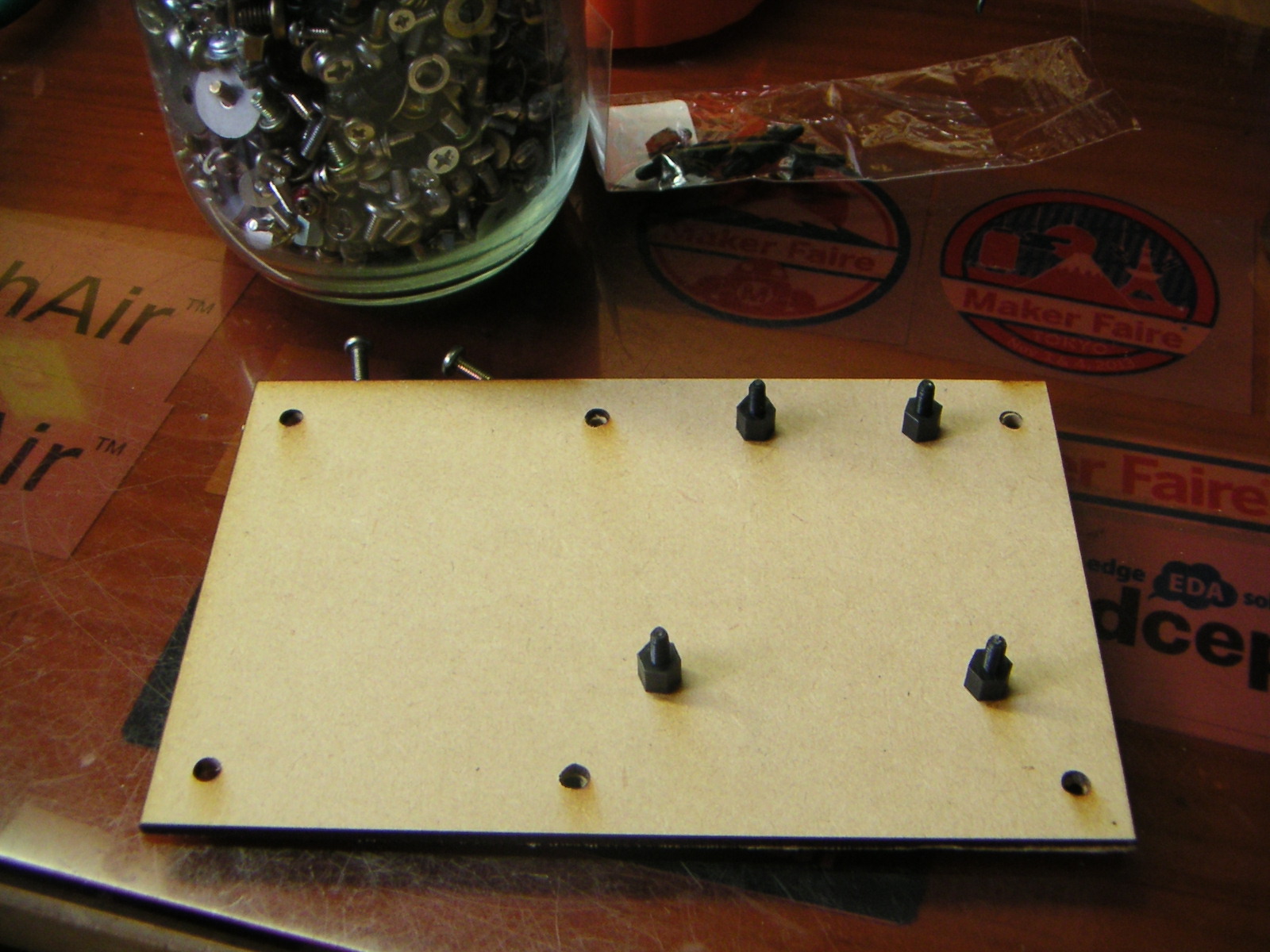
ばっちりです。
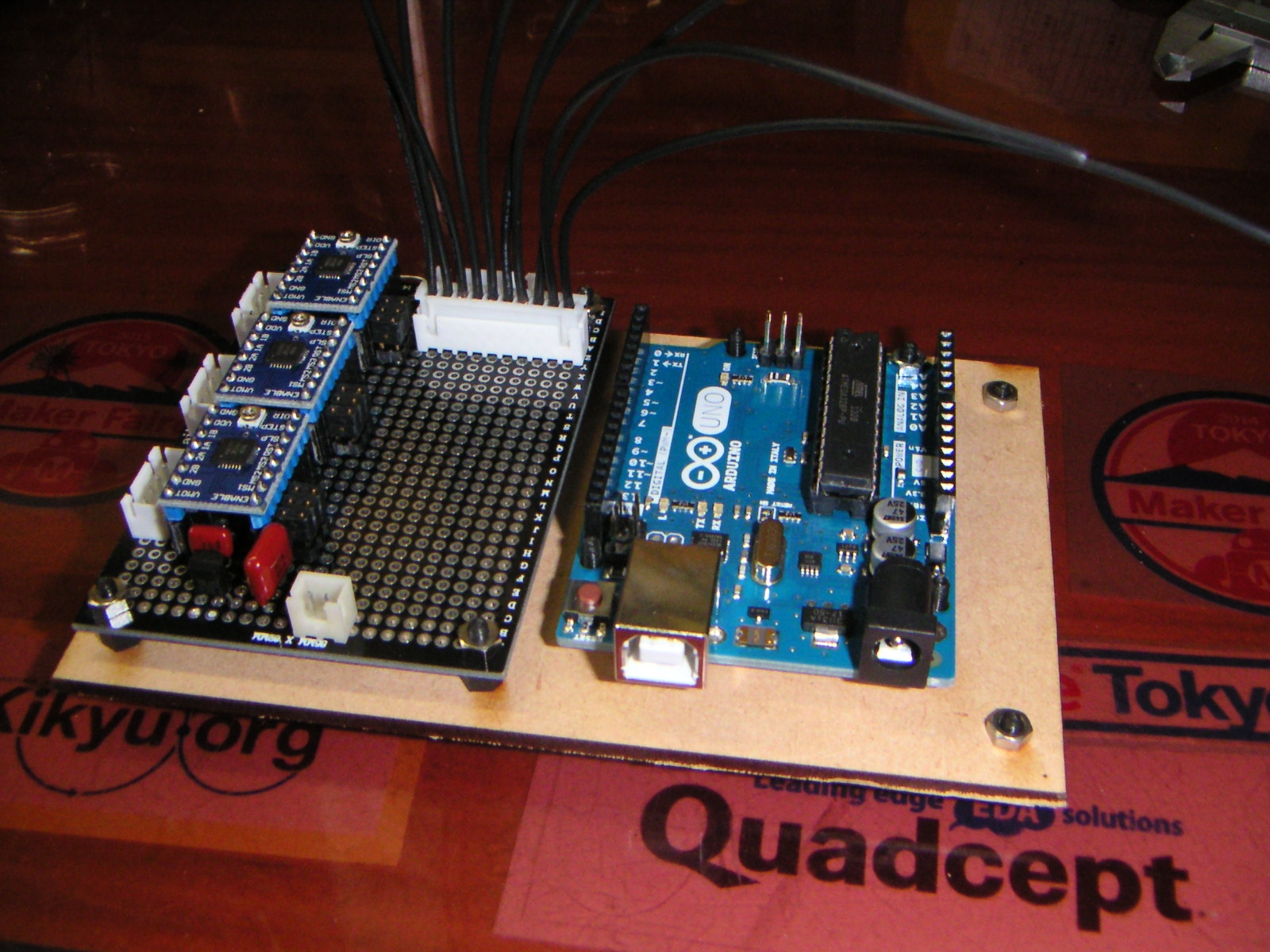
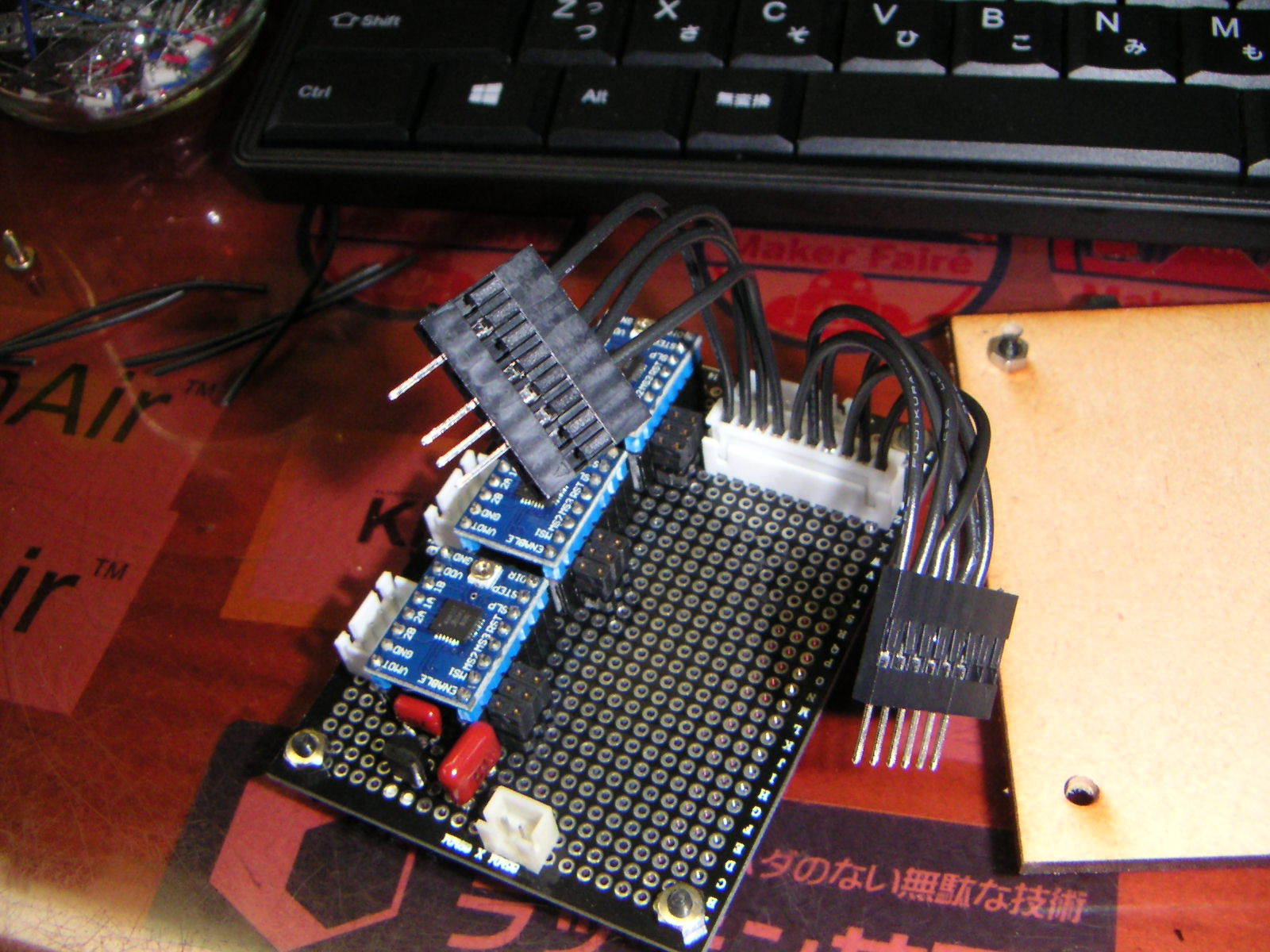
ドライバ基板も乗せて、
板全体にも足をつけます。
出来上がり。
位置関係が決まりましたので配線を続けます。
Arduinoのピンソケットに挿す側のコネクタを作ります。こちらはデュポンコネクタを使います。このピンはちゃんとした圧着工具がありません。秋葉(ヒロセや若松、千石など)でも探したのですが無いようです。
ので、無理やりエンジニアのPA-09で圧着していきます。なれるときれいに出来るものです。
こんな感じ。
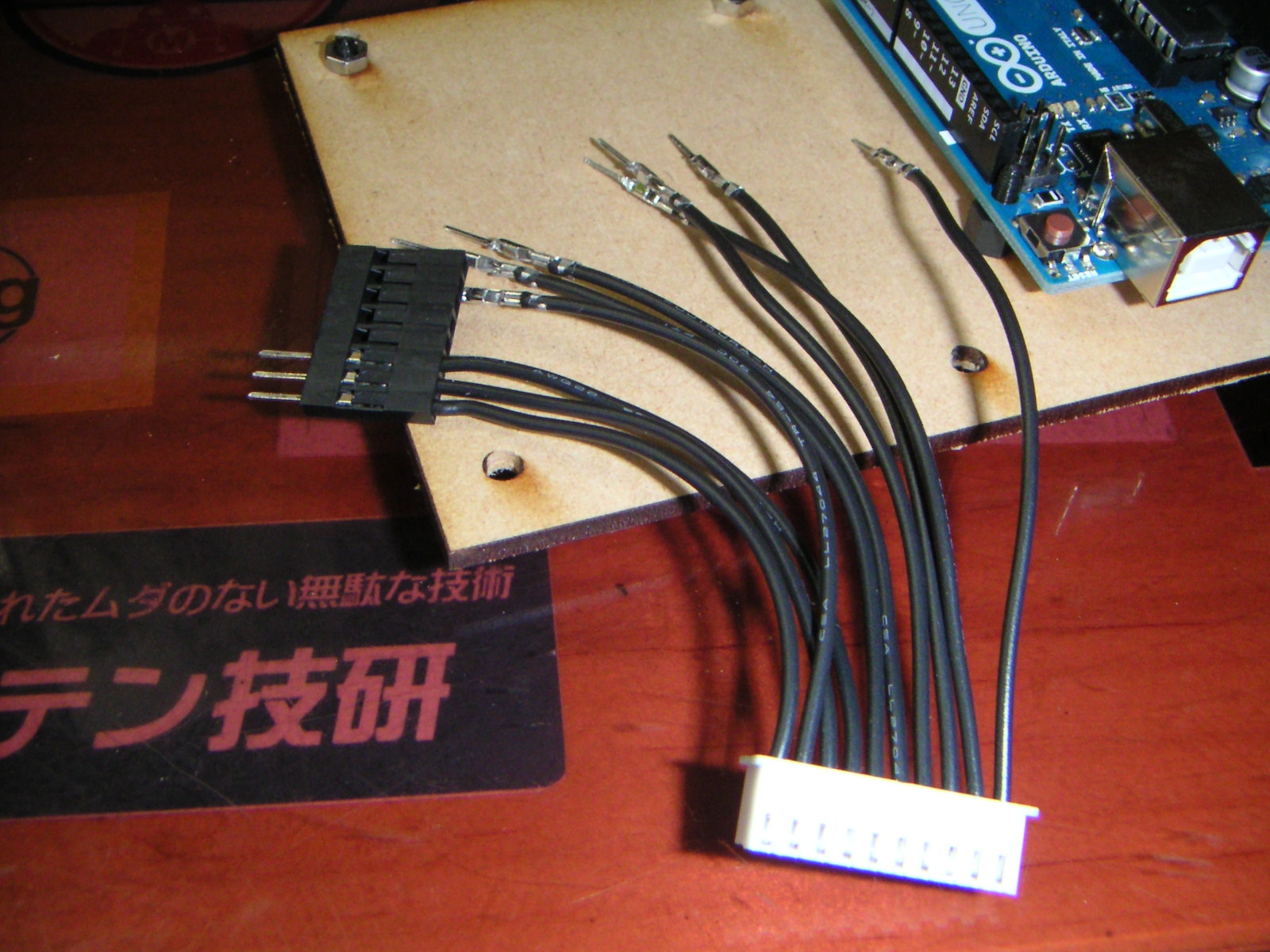
後日の拡張のことも考えて、ちょいと見苦しいですが歯抜けのまま使います。
Arduinoとの接続完了。
次にモータ側を作ります。
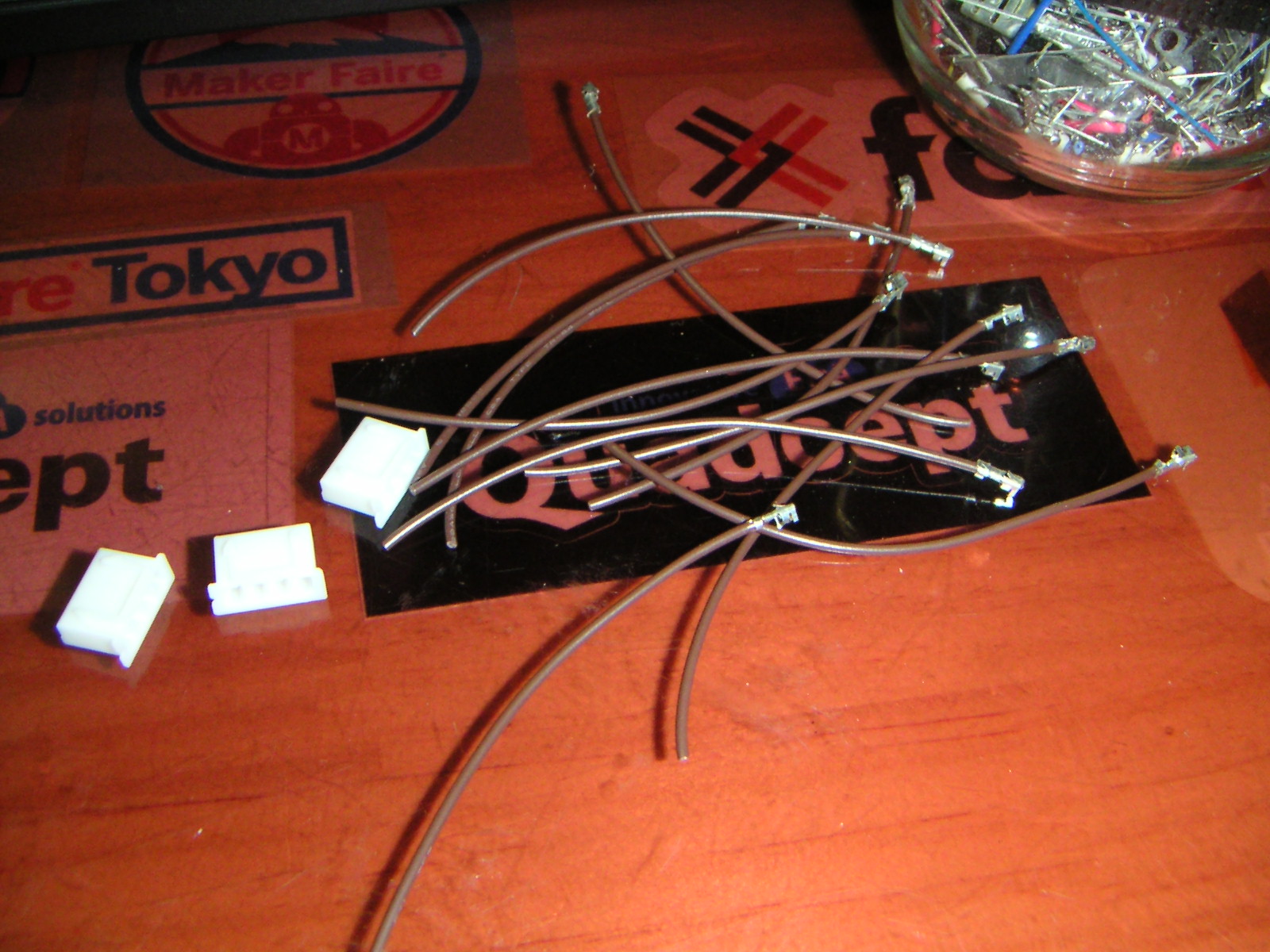
こちらは今使っている制御系(ブレッドボードのまま)との互換性を考えて作ります。

配線が終わったら、モータもモータドライバも接続しない状態で配線チェックをします。
Arduino上のgrblからDIR、STEP信号などが正確に送られてくること、ロジックの電圧、モータ電源の配線等を確認します。
問題はありませんでしたので、A4988モジュールを乗せ、モータを繋ぎます。
A4988モジュールの電流調整の半固定抵抗をまわして、モータへの供給電流を1Aに調整します。
これでモータドライバ基板は完成です。
次はgrblの設定と動作テストです。