XY軸を仮に組み上げて手動で動かしてみたところまで来ています。
このあと箱を作るかX軸にモータ乗せるか迷っていたのですが、箱を作ると場所をとりますのでモータを先に乗せることにしました。
まずちゃんと最後まで設計します。
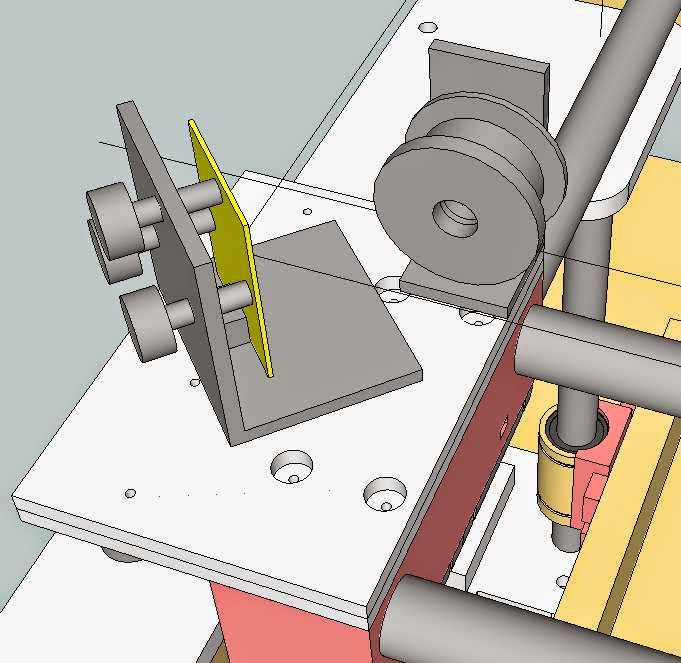
こんな状態で固定のことを考えずに位置だけ決めておりましたものを、
MDFを使ってモータの固定が出来るように考えました。
ということで、この部分をばらして、
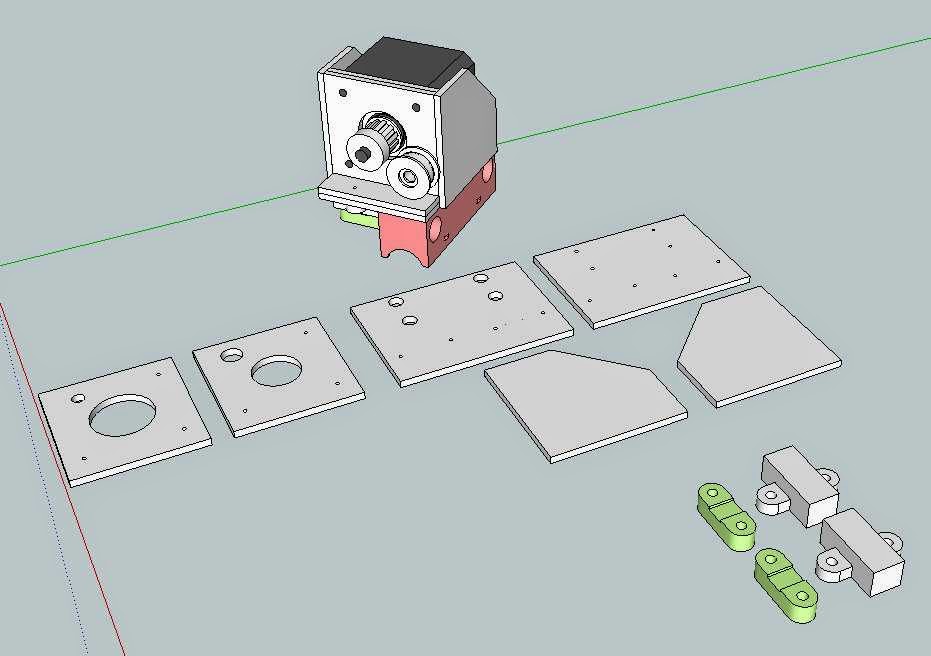
cadに落としてレーザカット用のGコードを作ります。
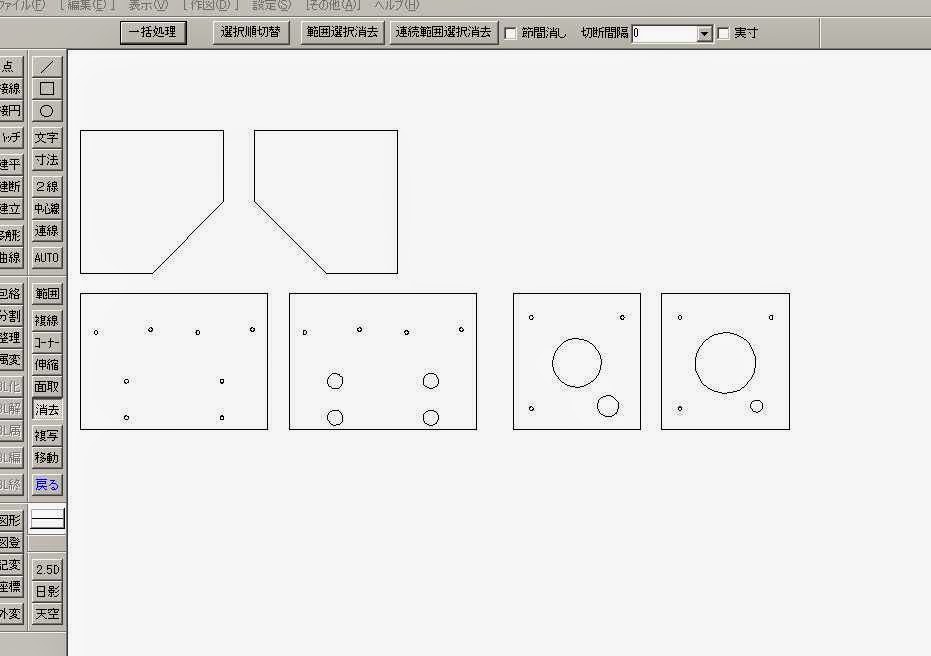
第二ミラーを乗せるステージもちゃんと設計してdxfに変換しておきます。ちゃんとじゃないか……
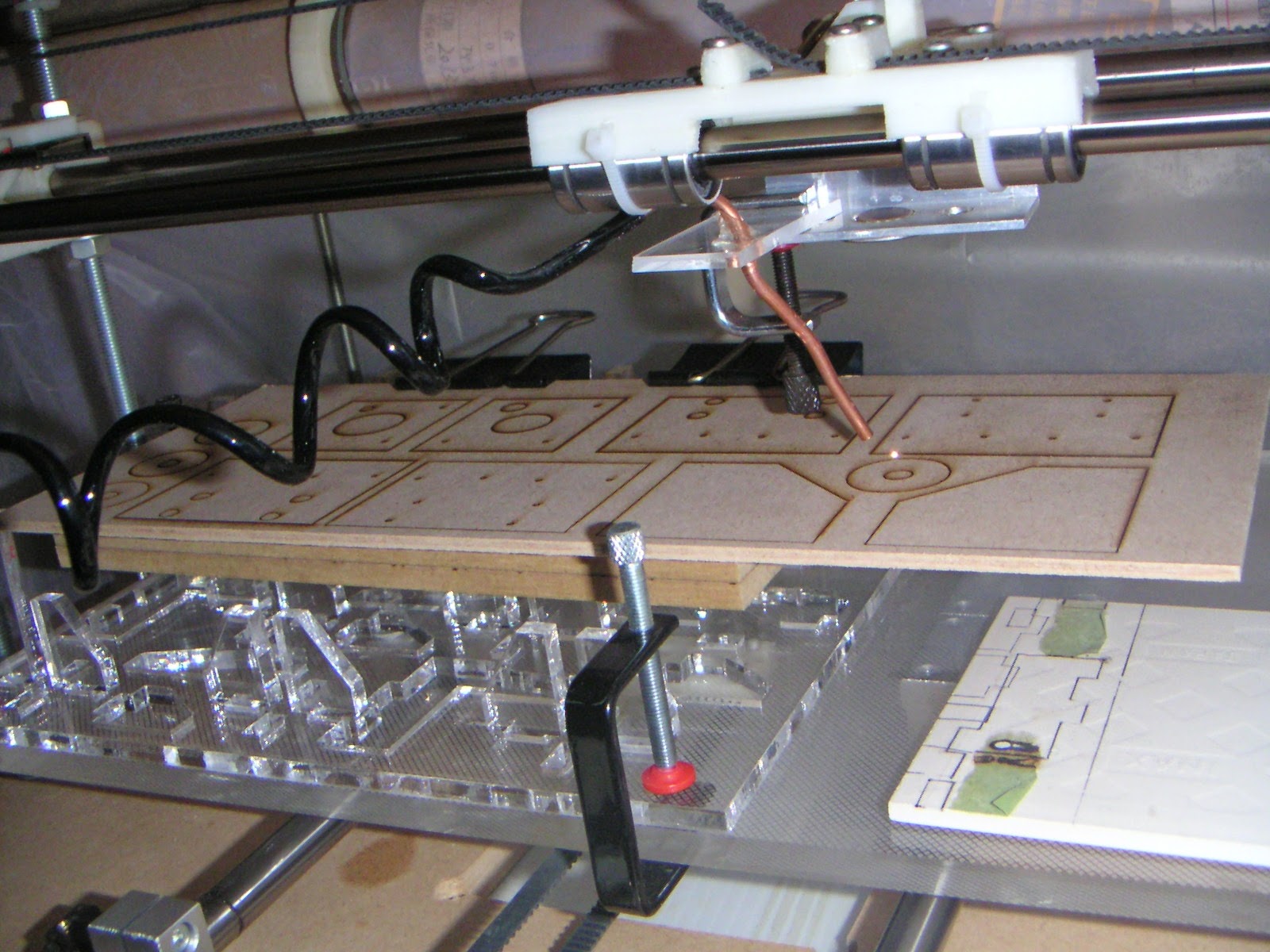
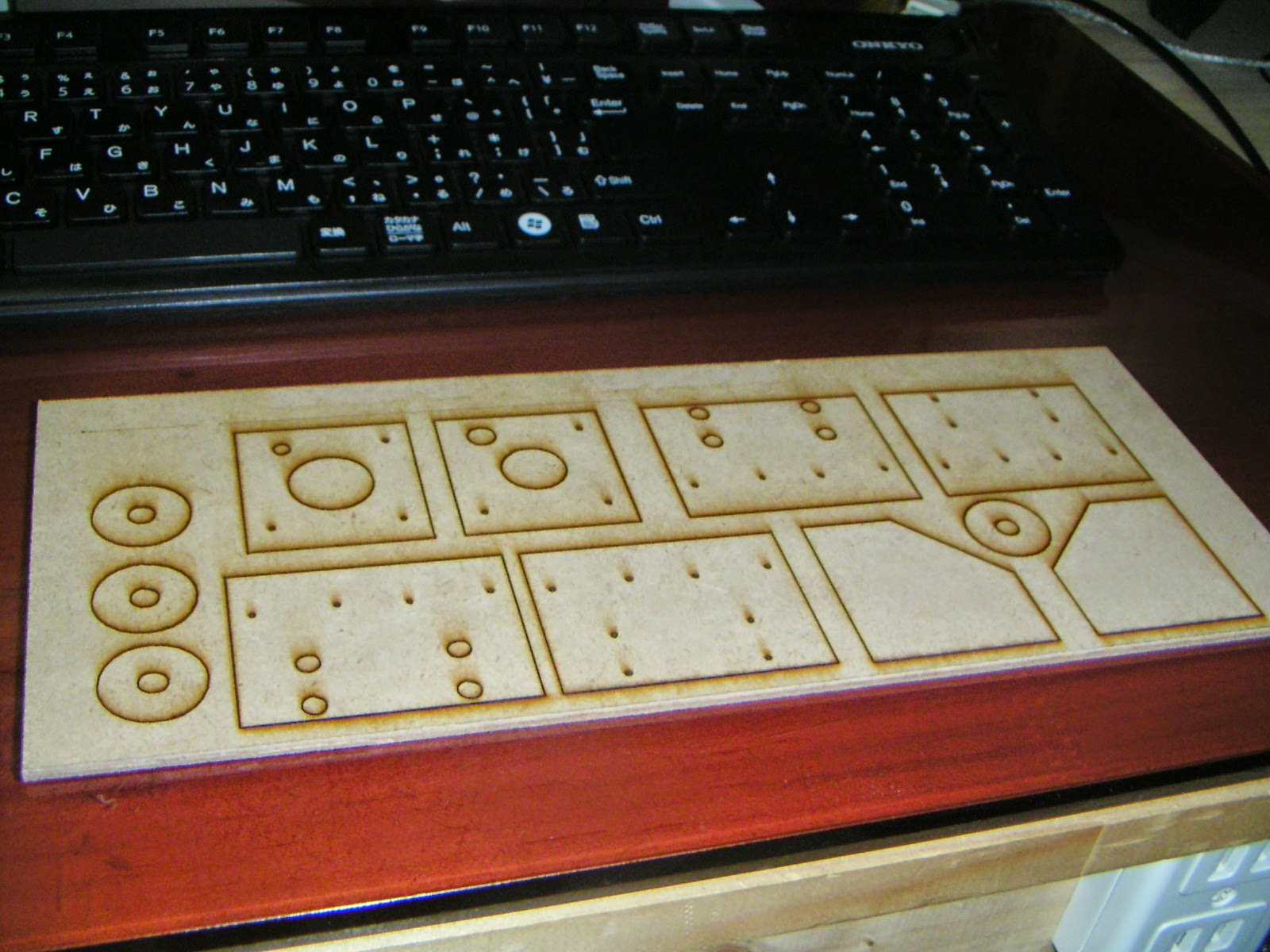
まず部材のカットから。ここのところ定番化している 2.5mmt のMDFを使います。
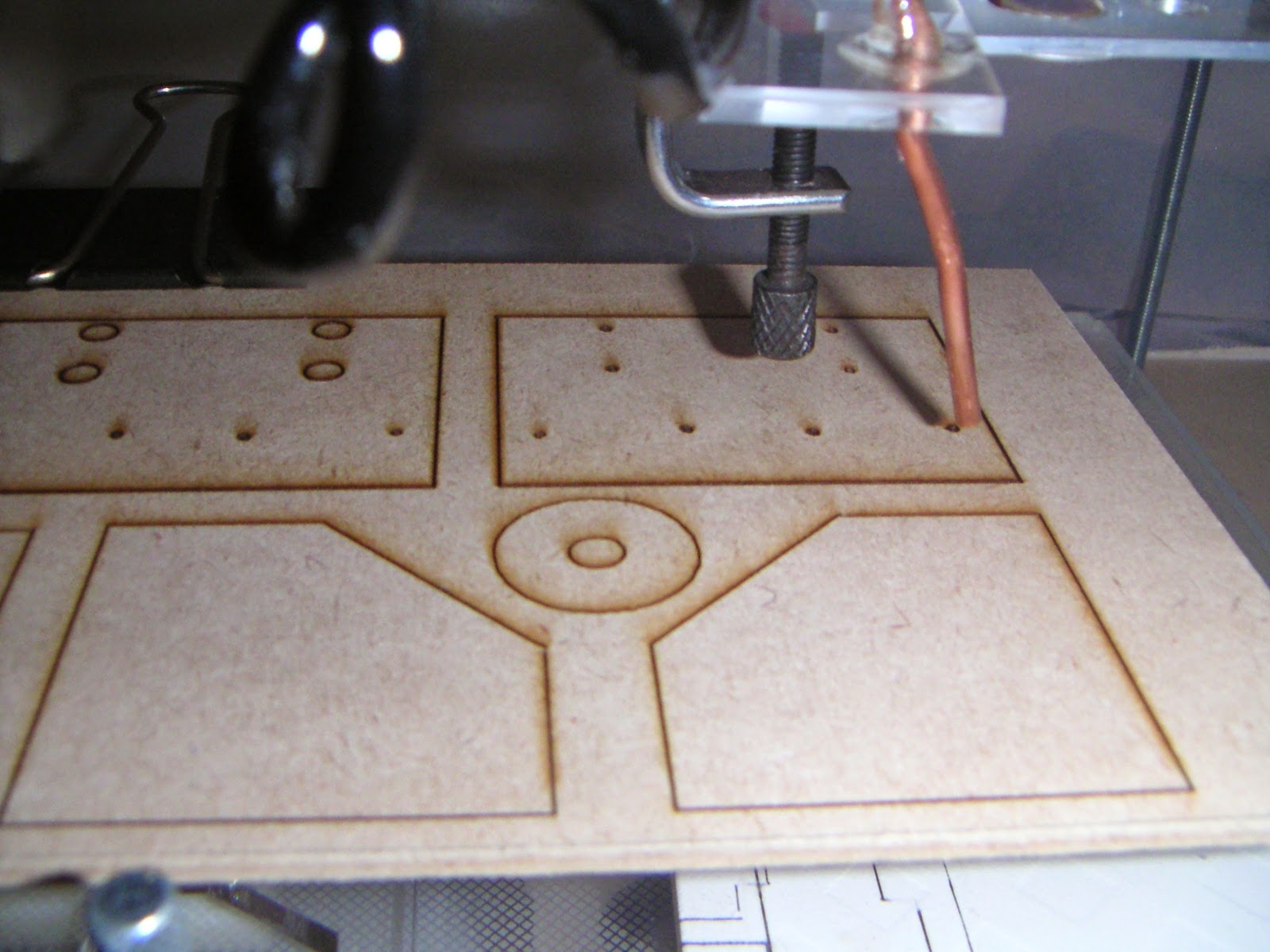
出来ました。表。
裏。
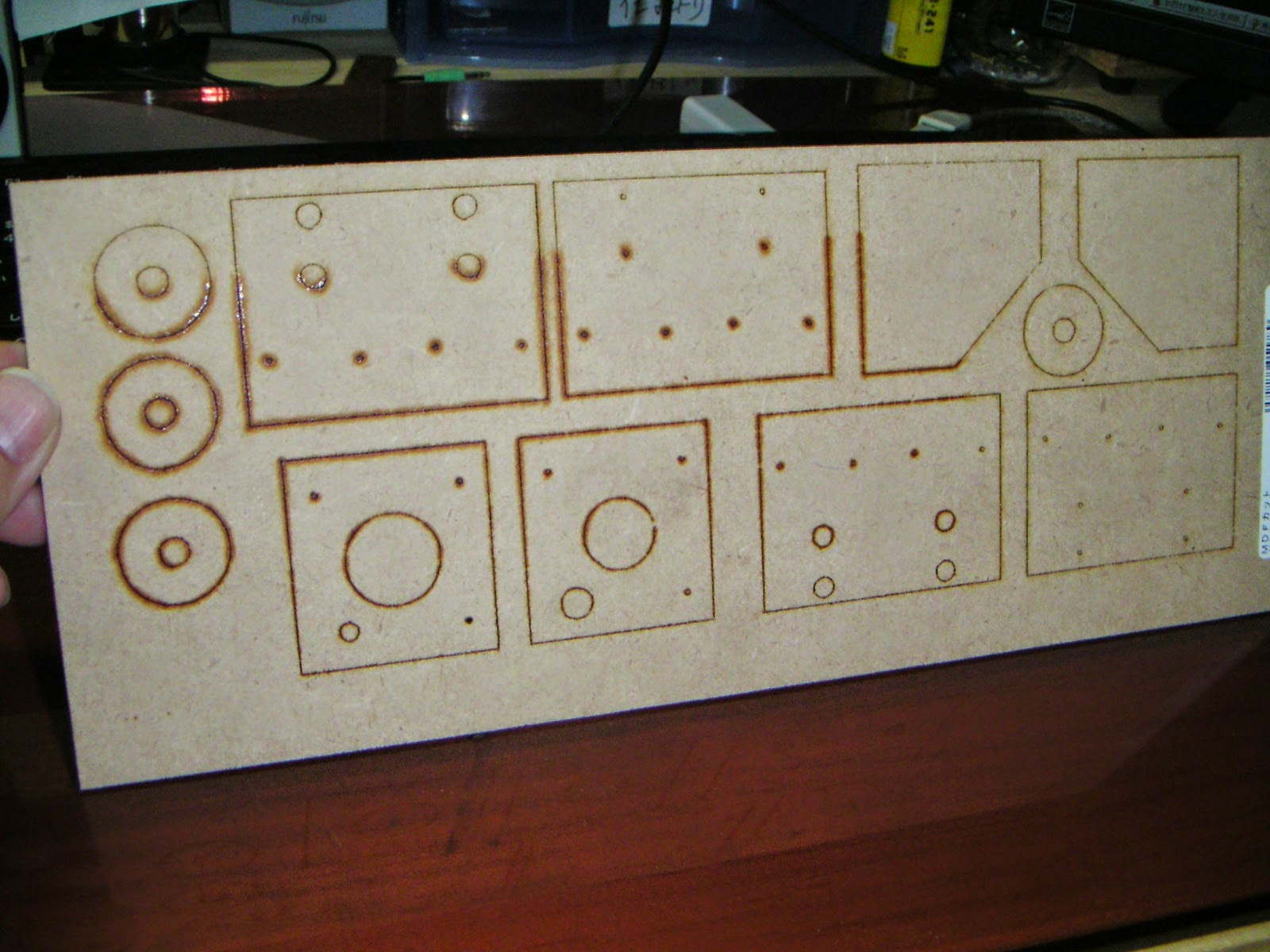
外して、

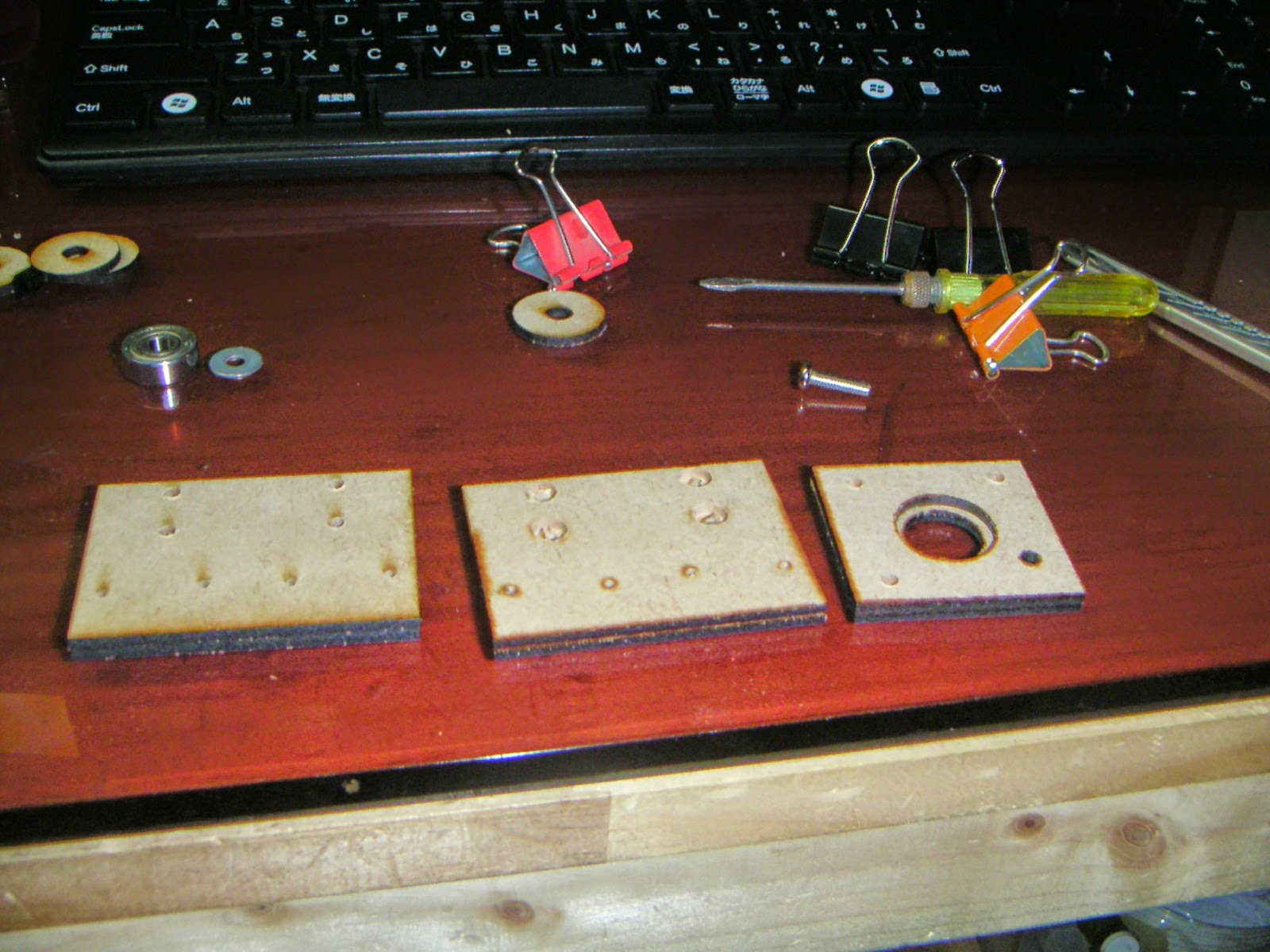
抜いて、貼り付けます。いつもどおりの作業なので詳細省略。
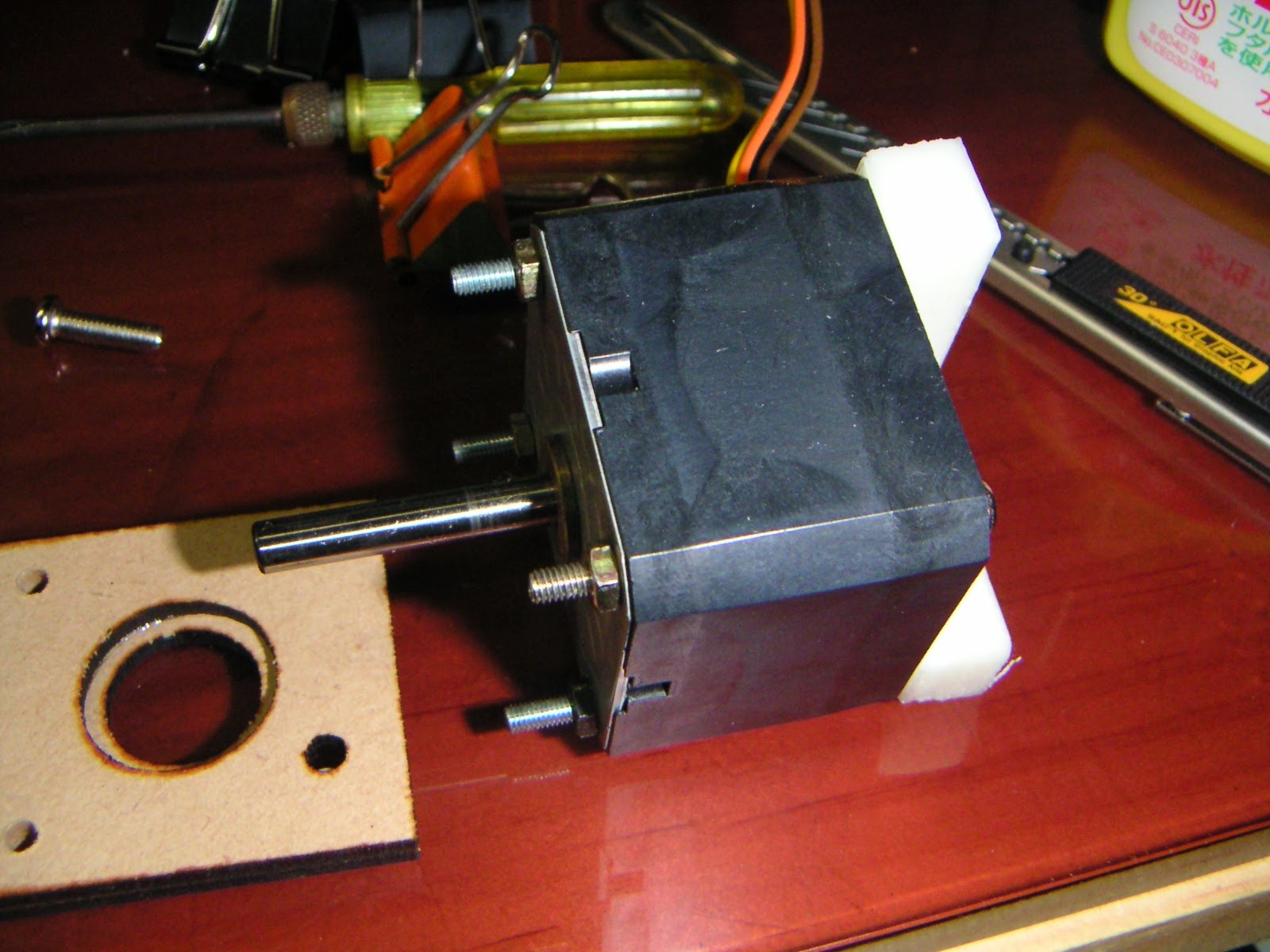
モータは、大きなものと交換した時に取り外した 45mm 角の物を使います。
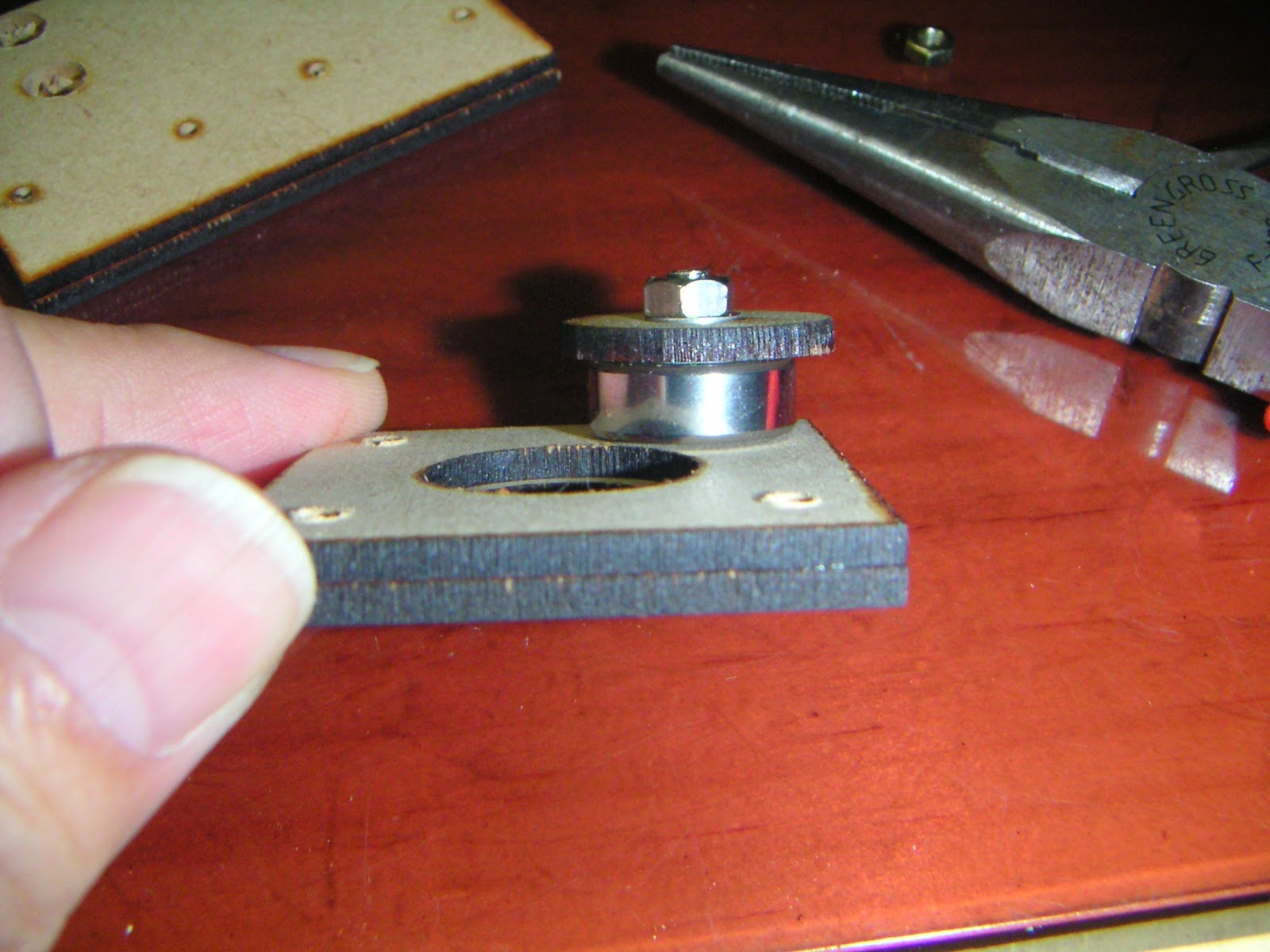
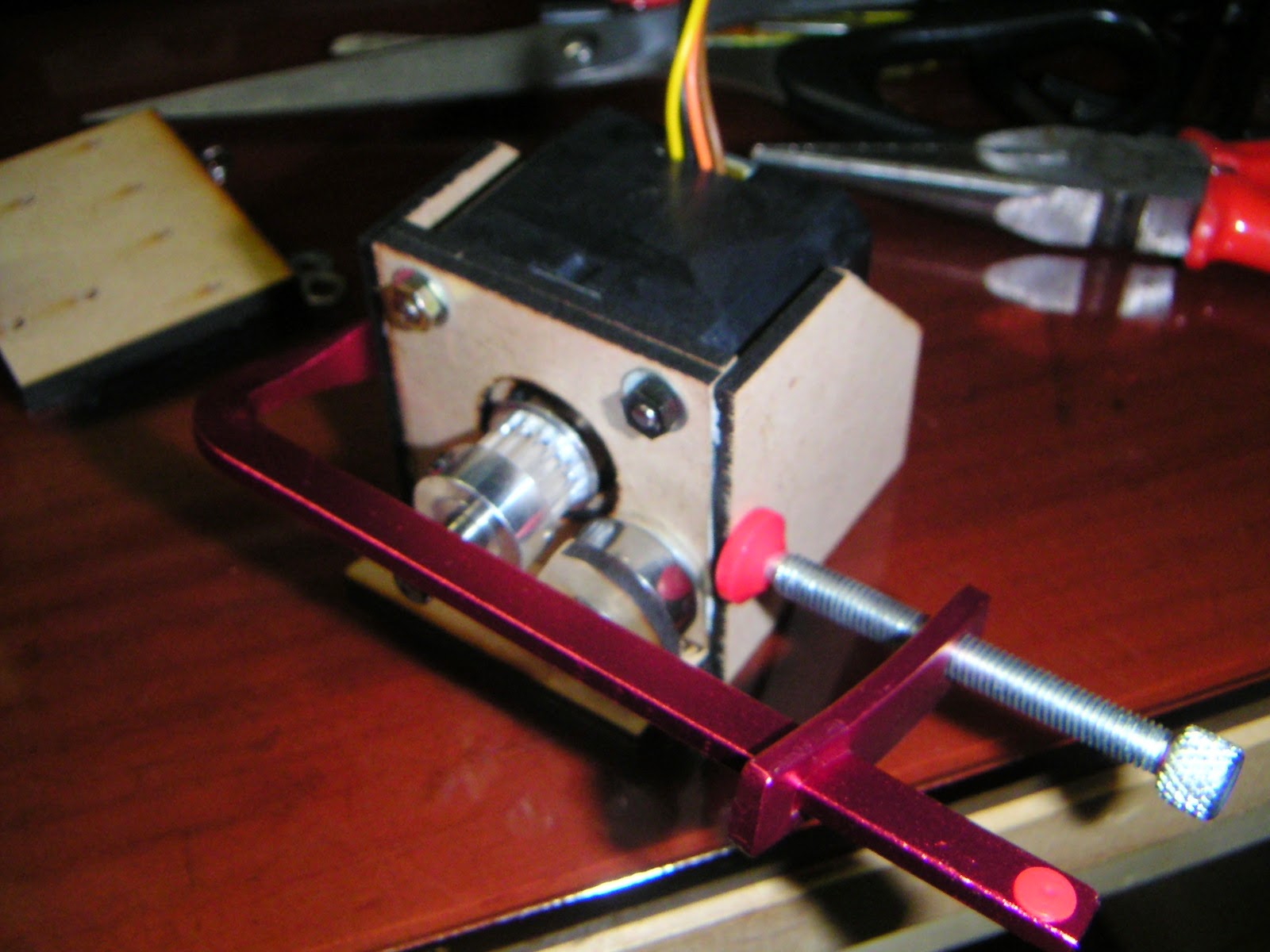
モータ取り付け板にベルトの高さを合わせるためのベアリングプーリーを取り付けていきます。
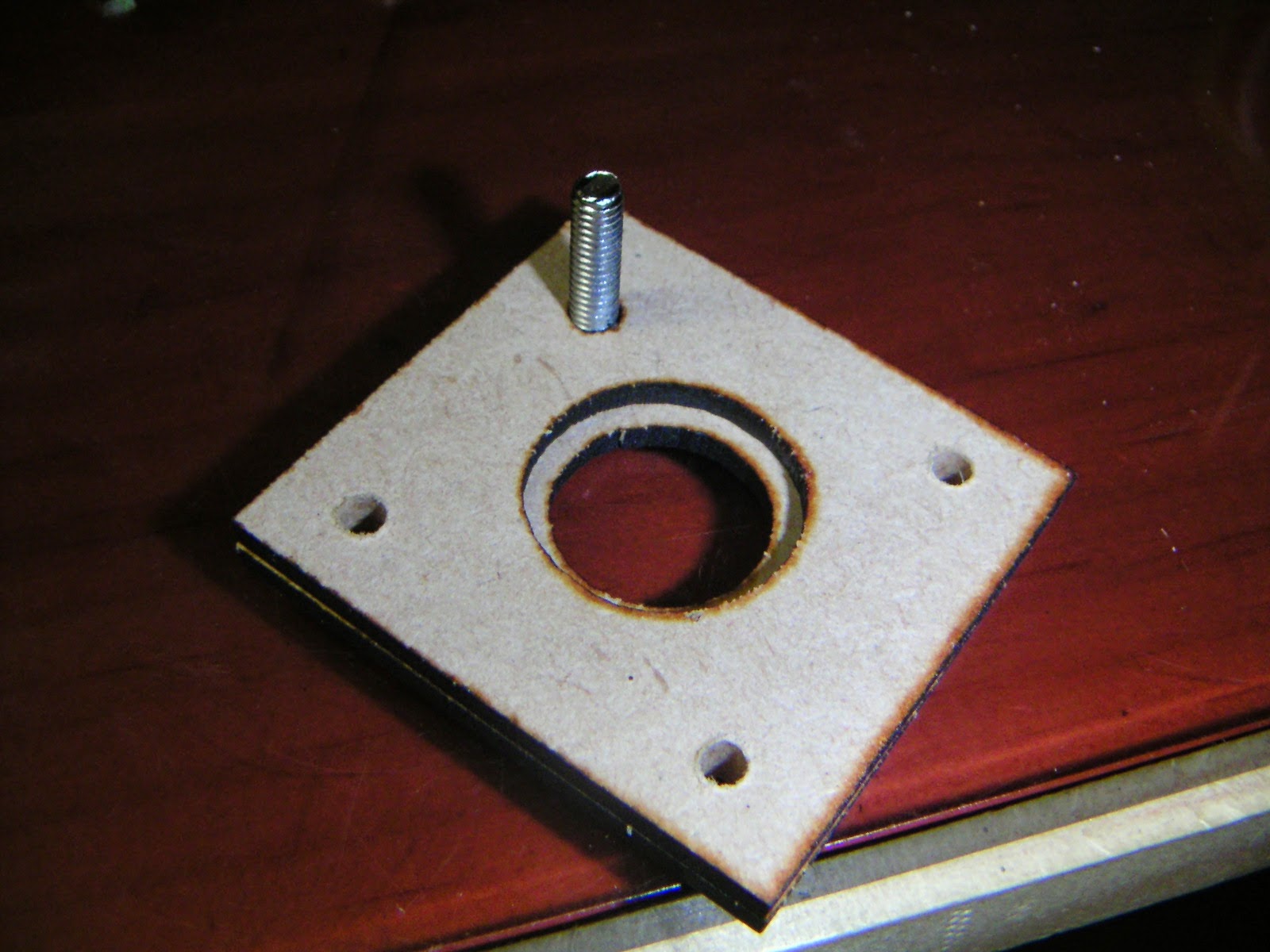
M4ねじに 内4/外6mmφのウレタンチューブをかぶせて、
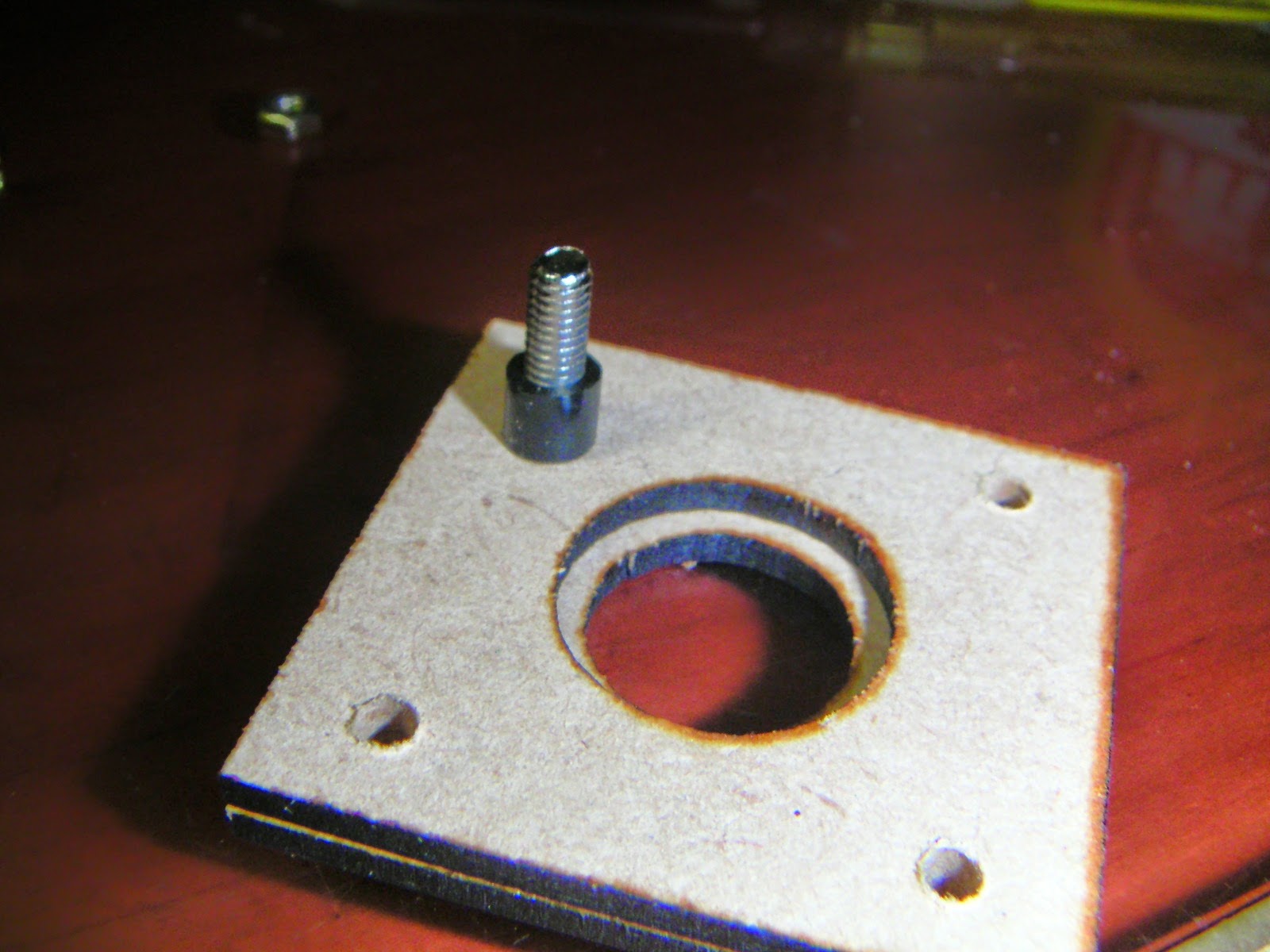
6mmベアリングを押し込みます。
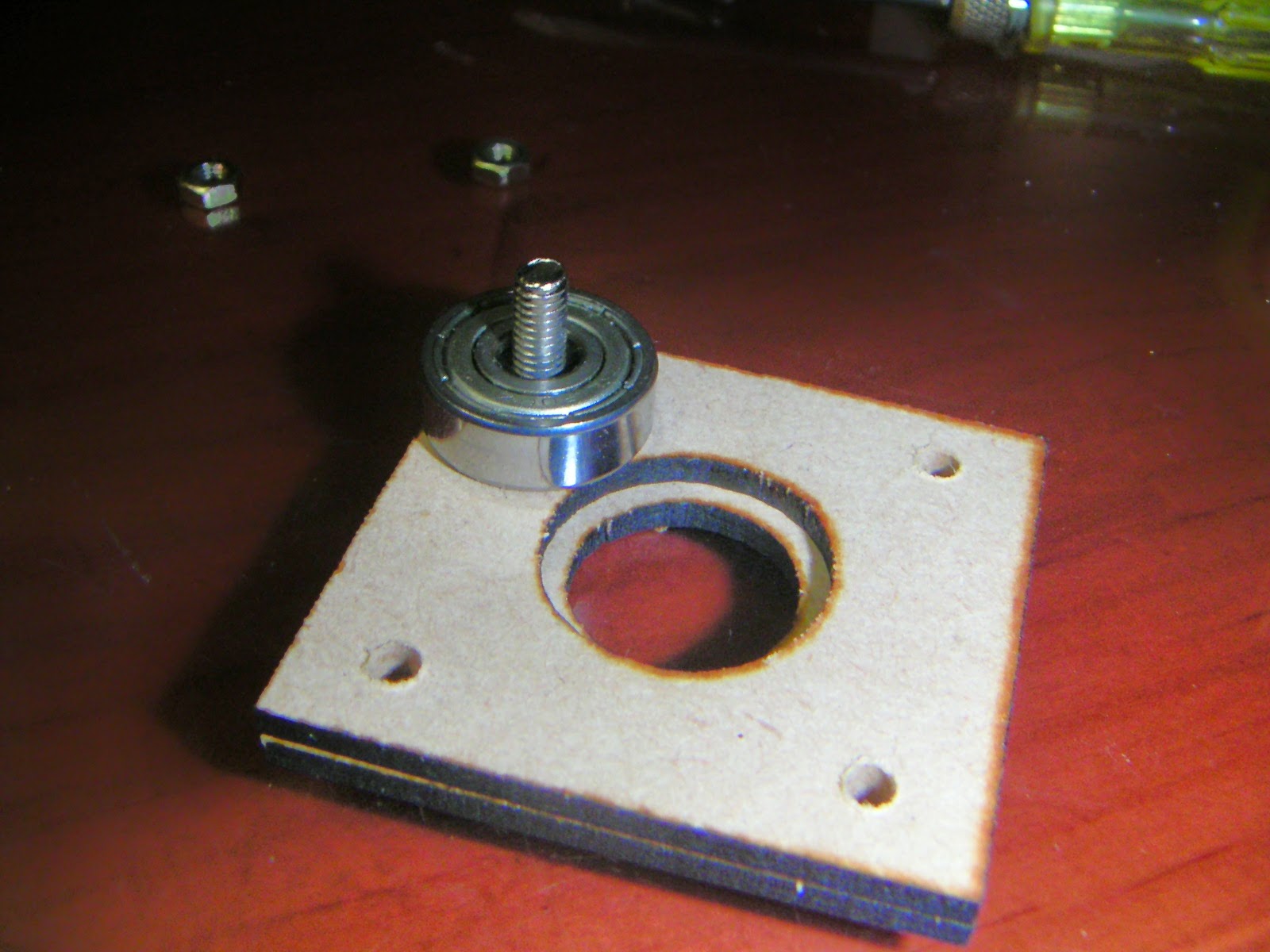
MDFで押さえて、
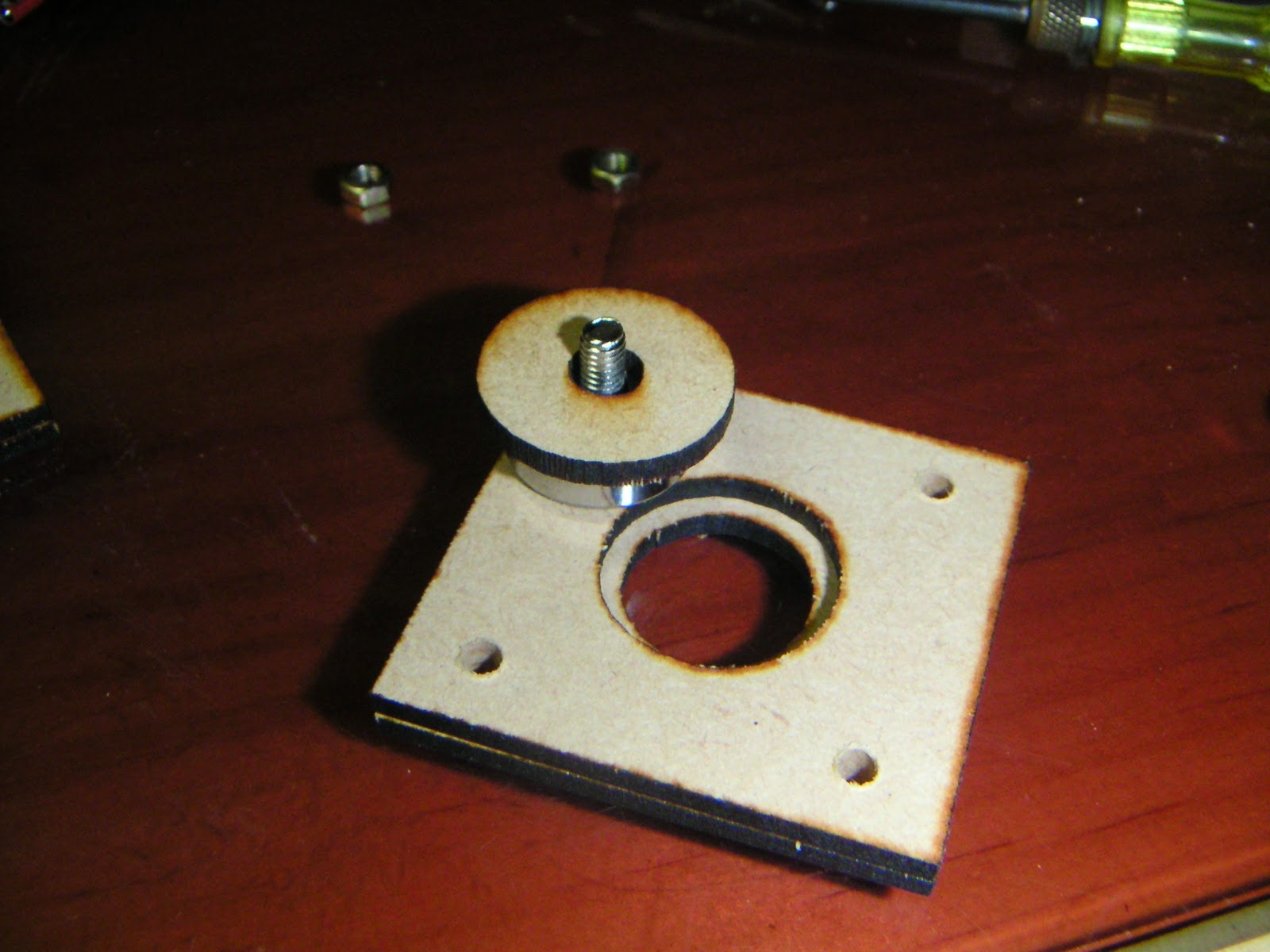
ねじを締めて出来上がり。高さの調整は組み付け時に行うことにします。
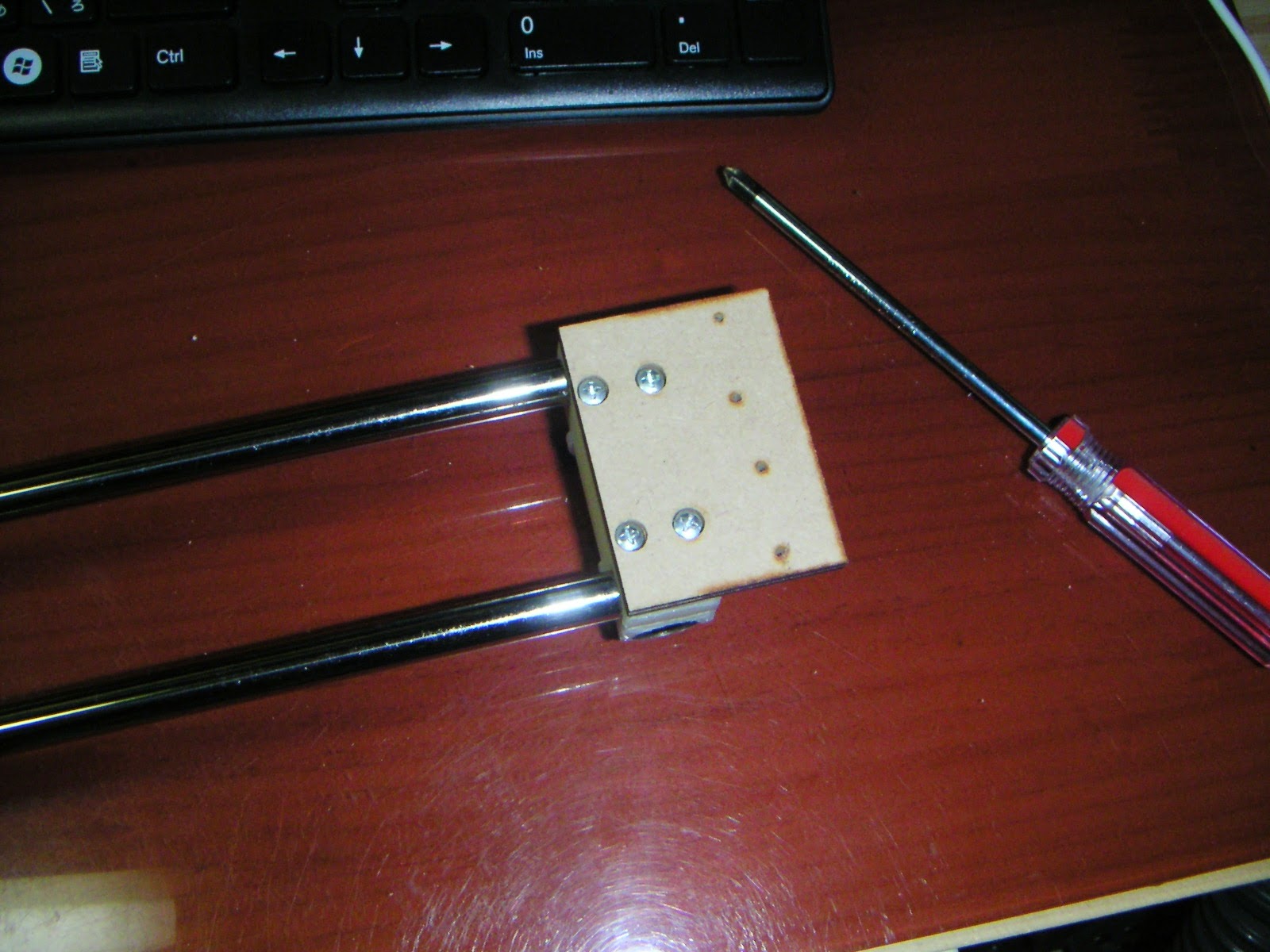
残りの3つのねじ穴を使ってモータを取り付けます。
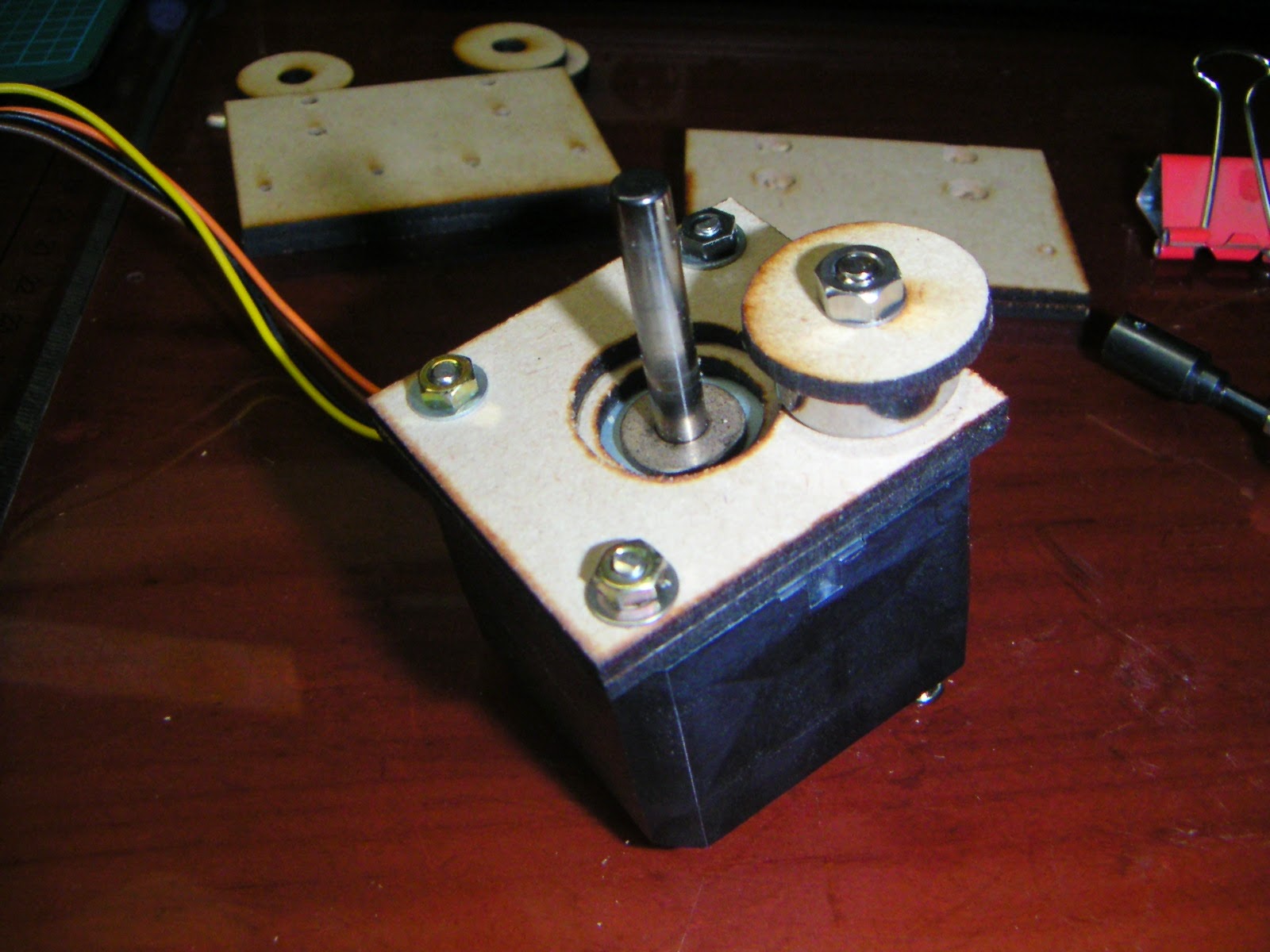
MDFの押さえをちょいと切り落として干渉が無いようにしました。
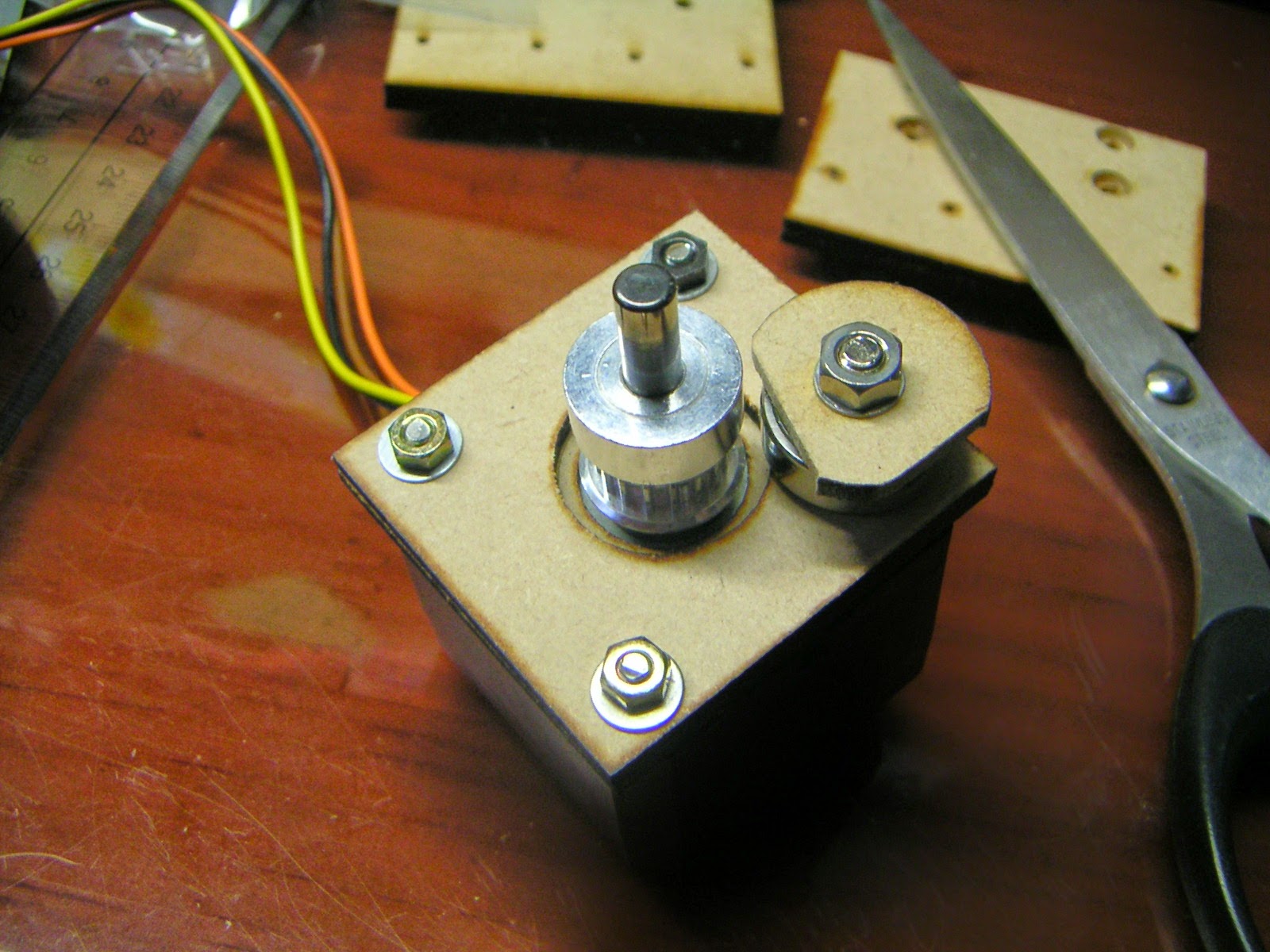
出来上がり。

側板を位置決めして、
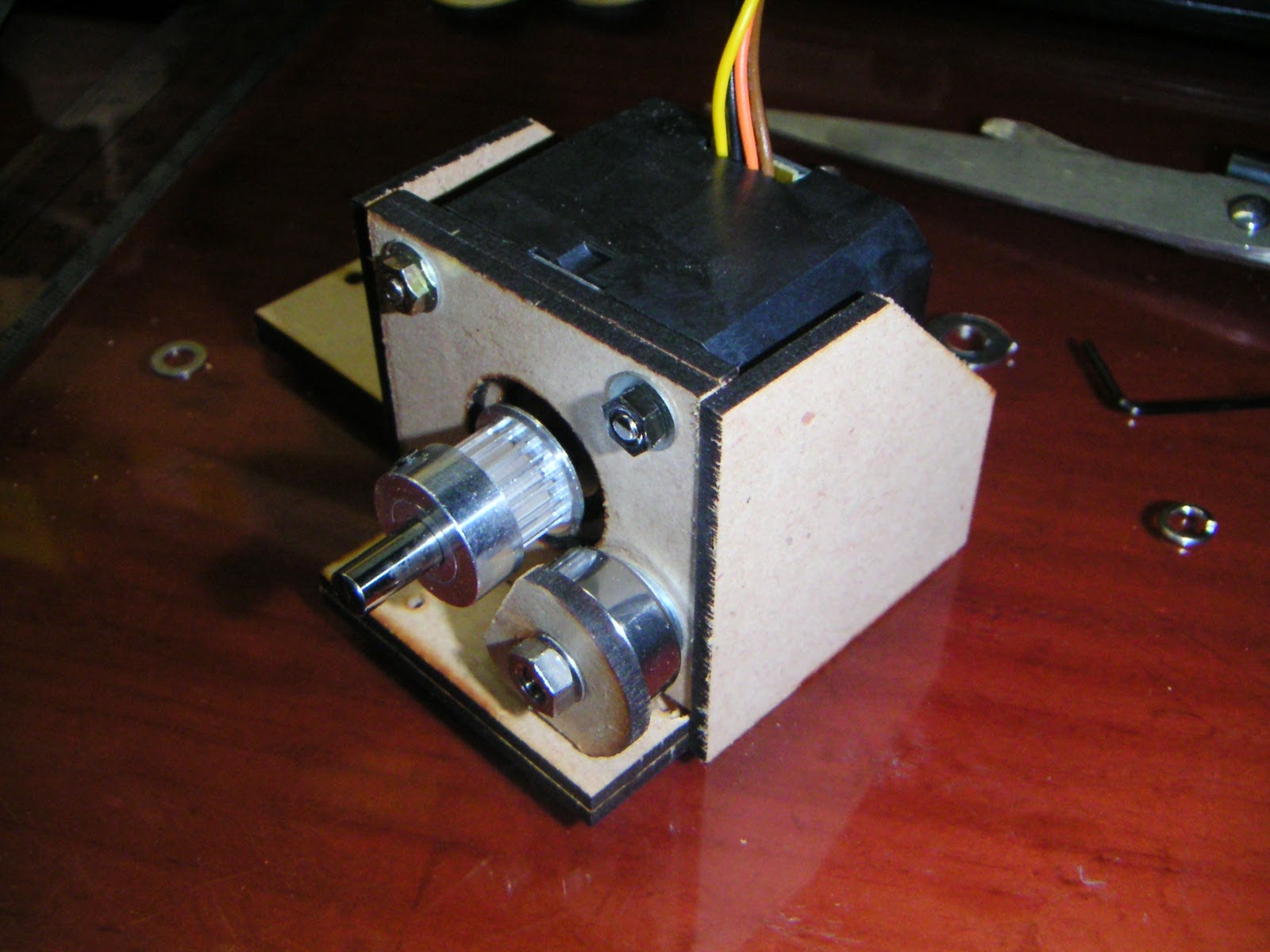
木工用ボンドで接着します。この時点ではベースには固定しません。ベルトを張るときに最終の位置調整をします。
次にすでに作製したX軸を持ってきて、

第二ミラーやモータを載せるステージをねじ止めしていきます。

がっちりとつきました。これは頼もしい。
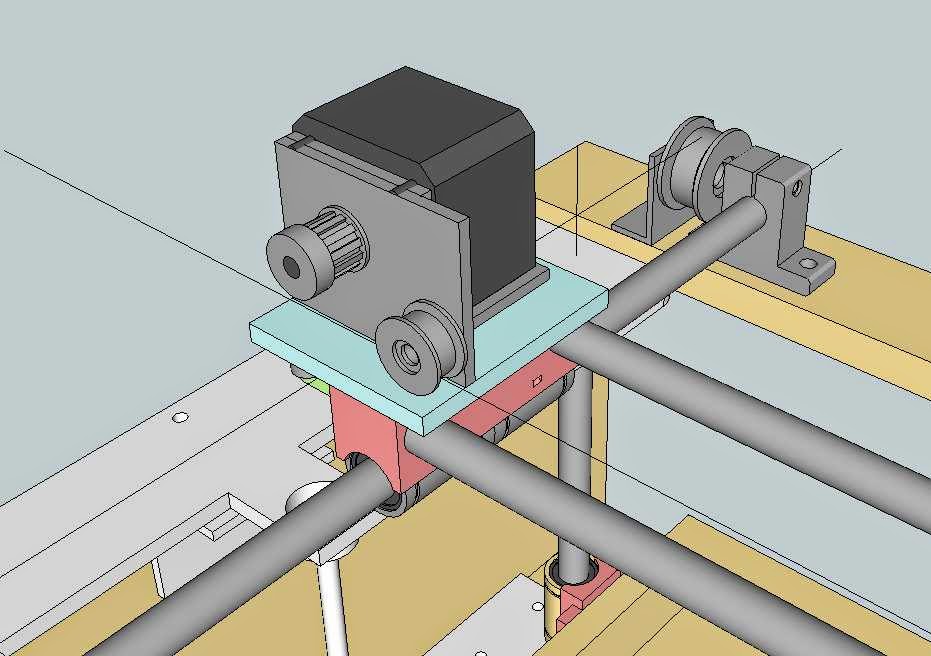
モータを乗せるとこんな感じになるはずです。
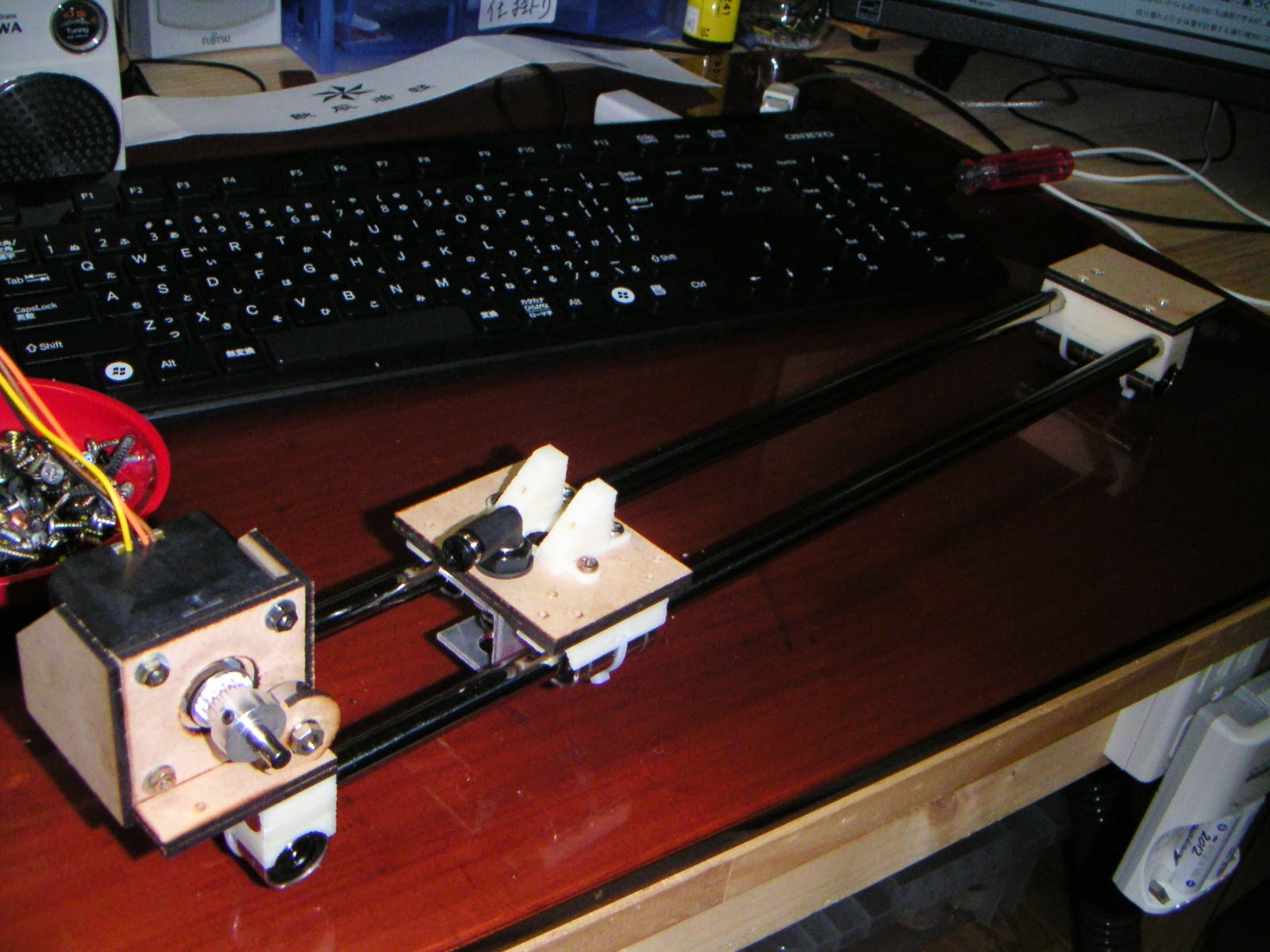
モータ側いっぱいにキャリッジを寄せたとき。

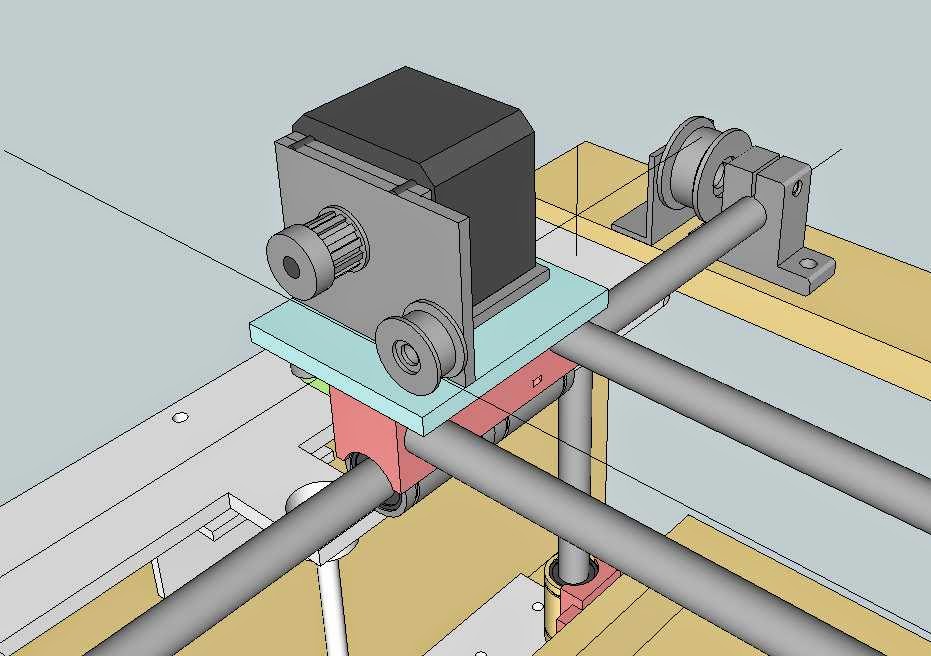
反対側。
最大限にストロークが取れるように注意して設計しました。今のところ思惑通りです。
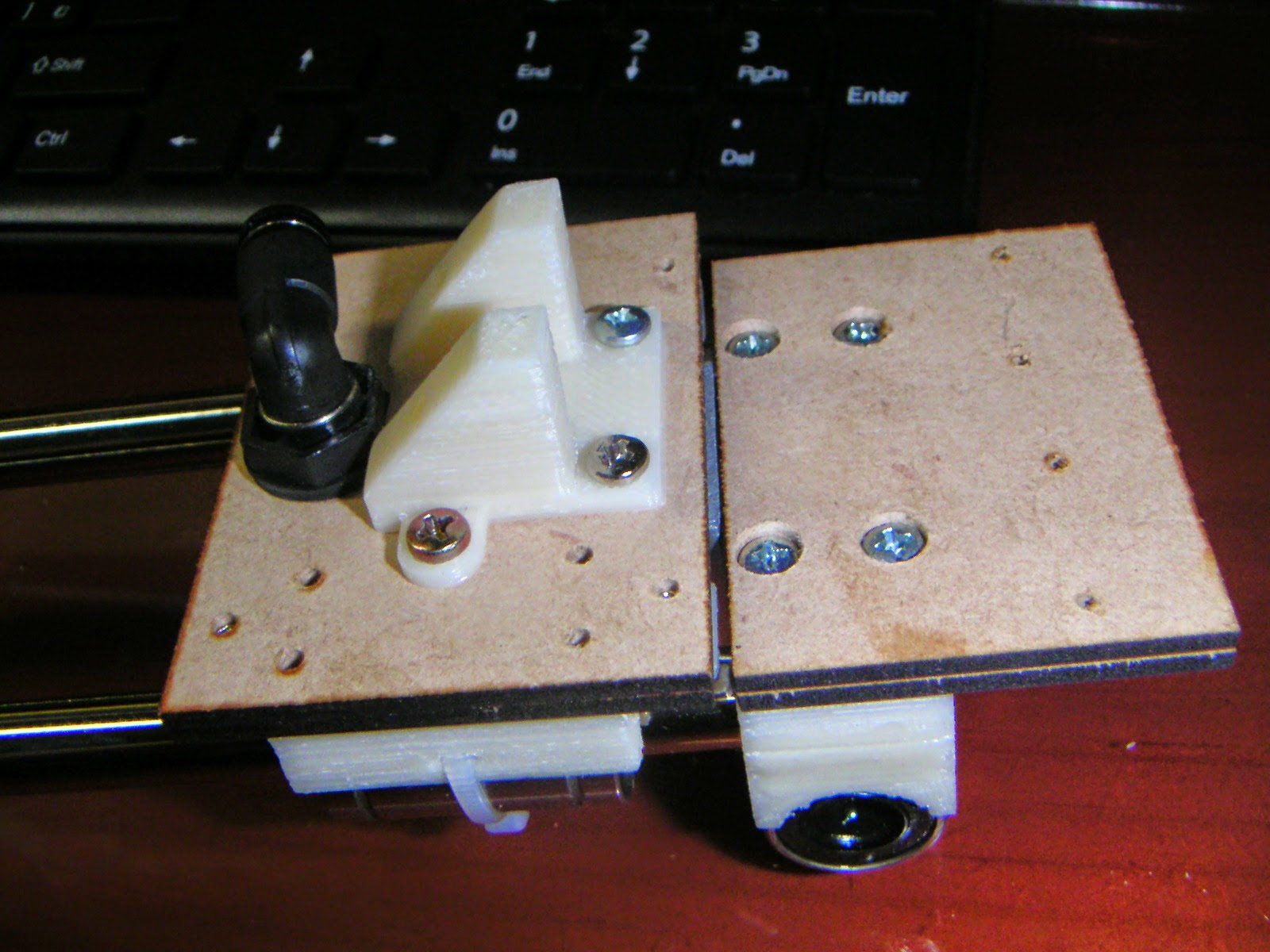
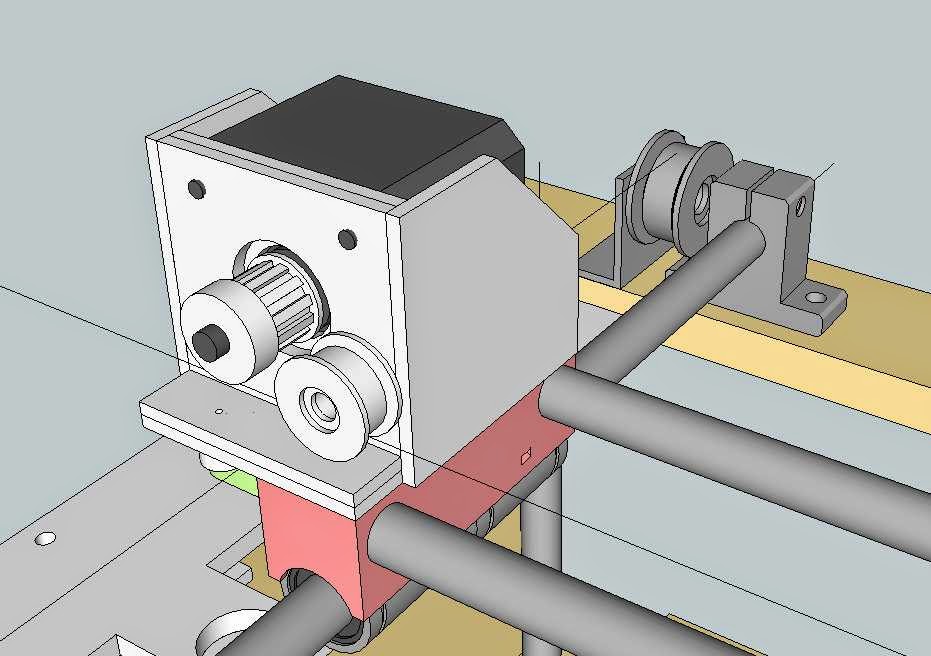
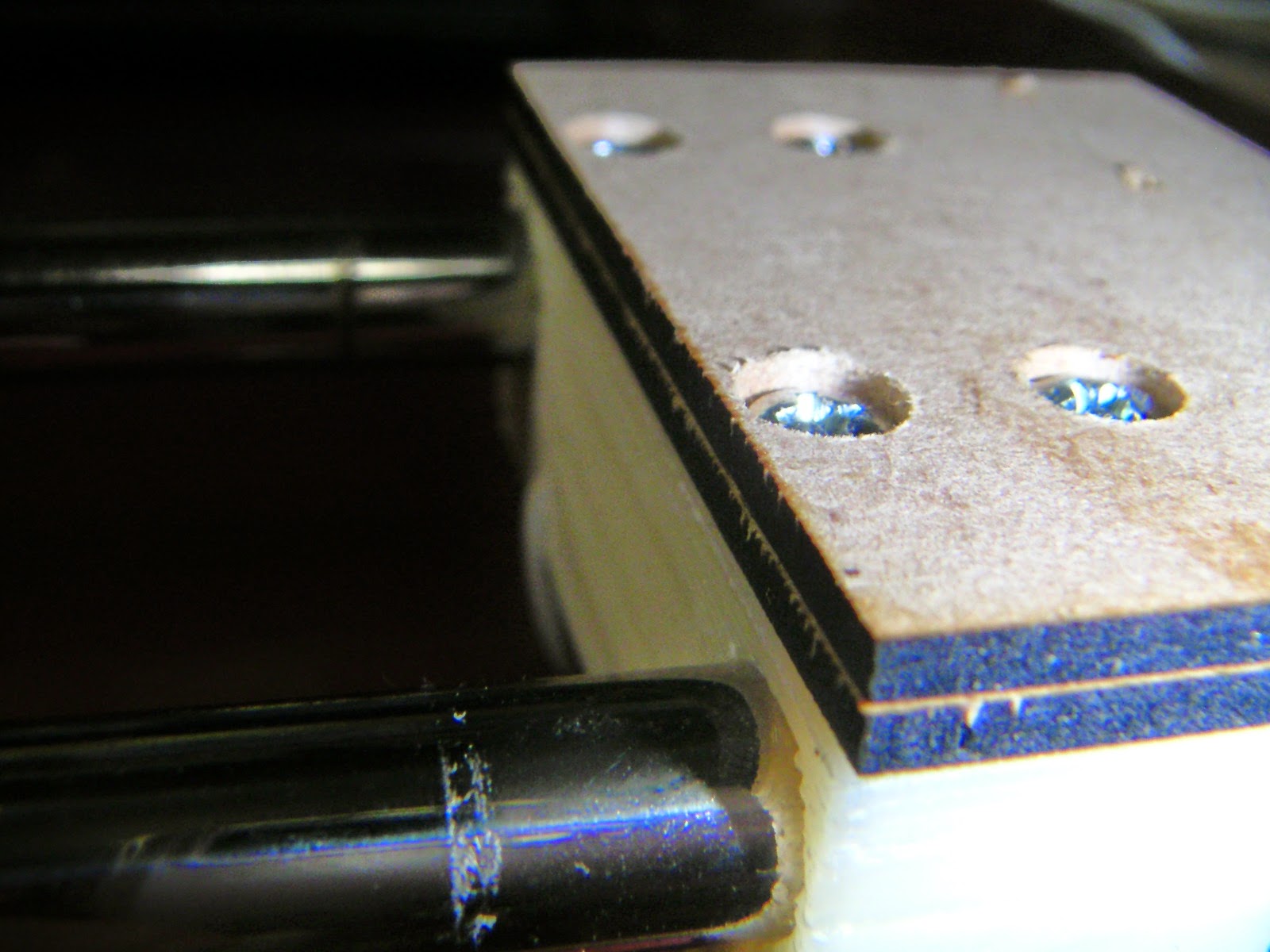
ばっちり設計通りです。3Dプリンタ部材とレーザカット部材の取り付け部には全く段差がありません。
明日はベルトの固定部分のプリント、モータのマウントを作り、組上げとPCコントロールでどの程度のスピードが出せるかを試してみたいと思います。