
CNC3040とPCをGRBL経由で接続するBOXを作ります。
構成は
PC—-(USB)—-[GRBL on Arduino]—-(D-SUB25)—-制御BOX—-CNC
です。
では行きます。
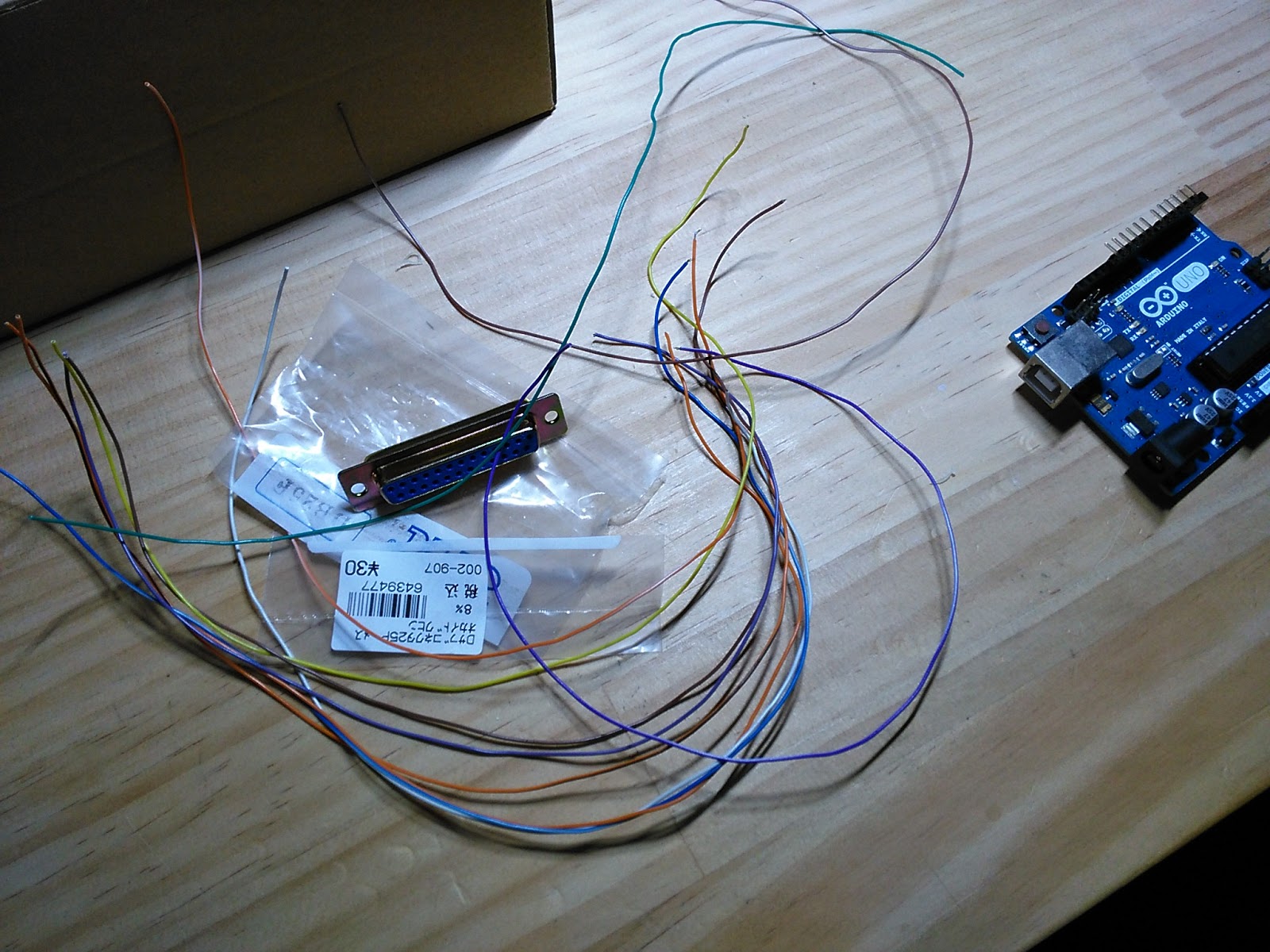
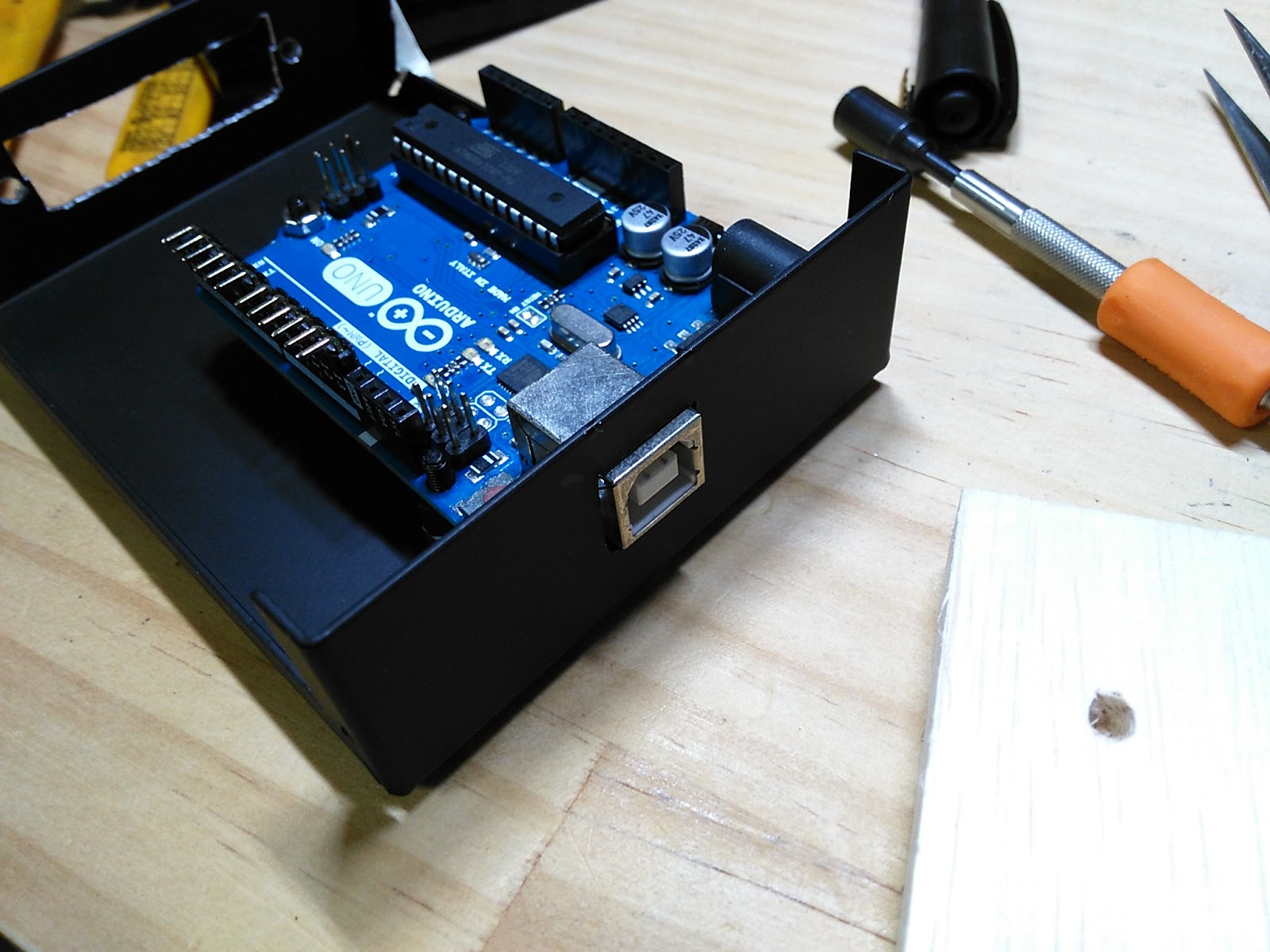
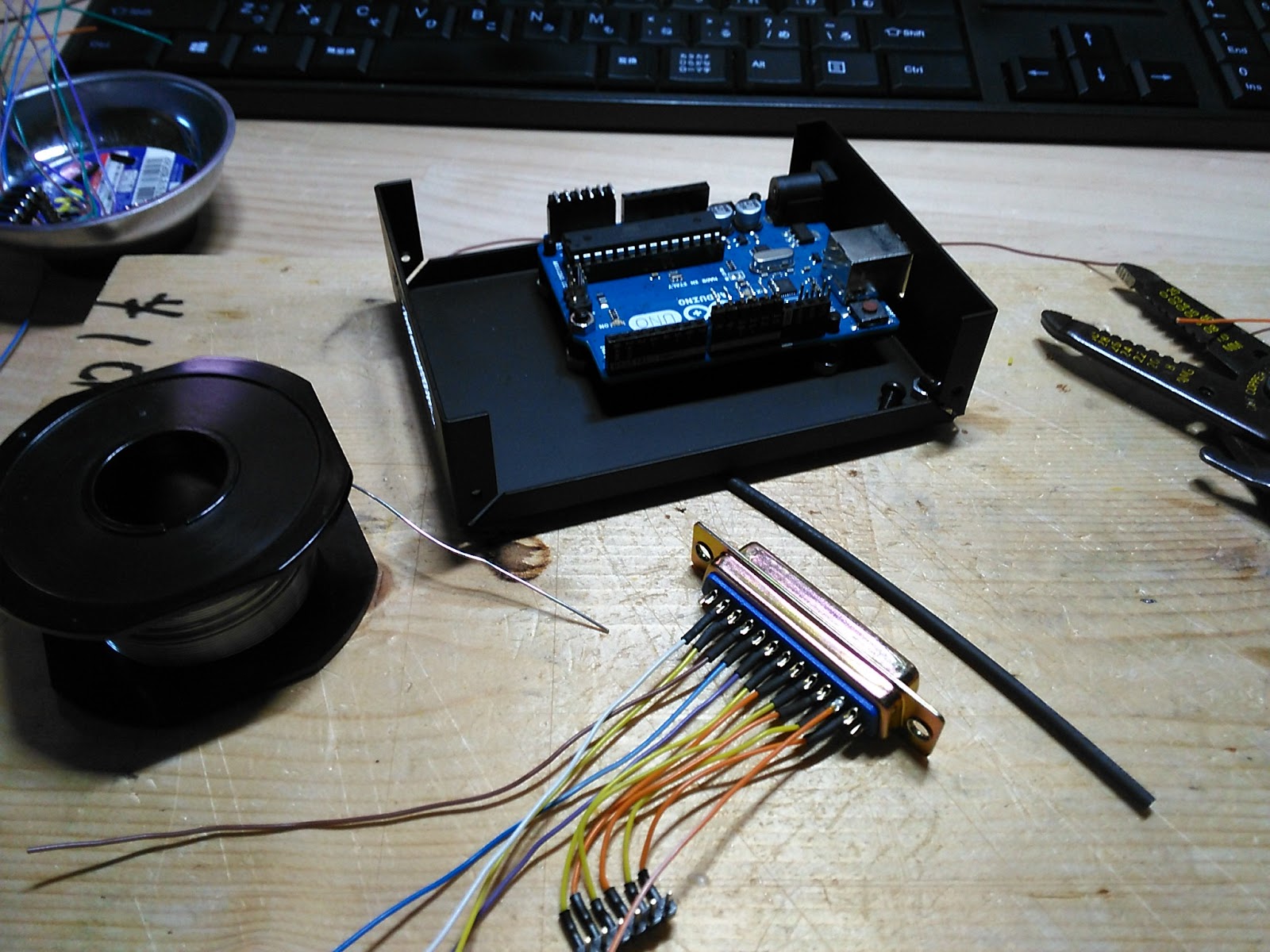
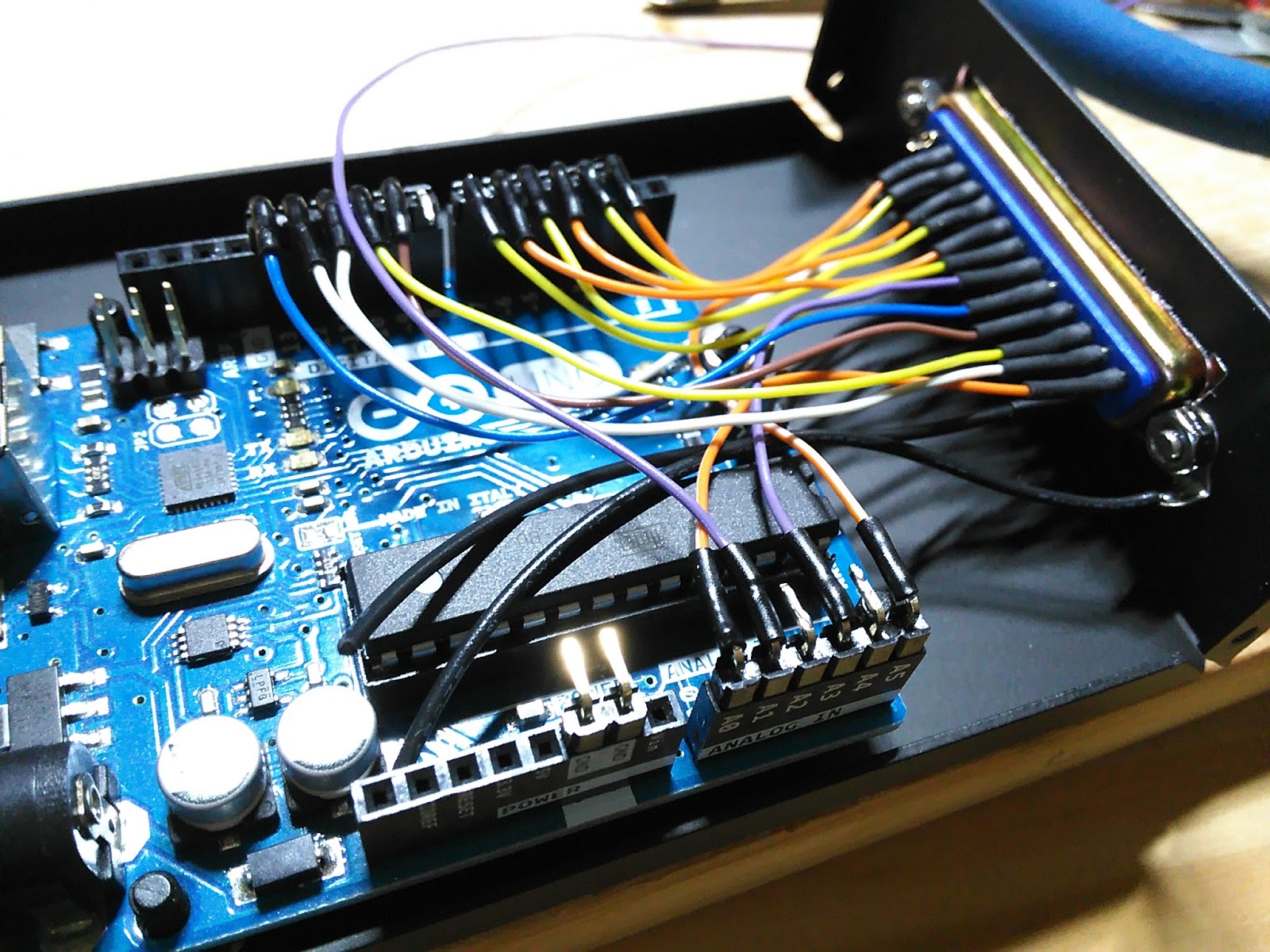
まずArduino。珍しく正規品のUNOを使ってみます。新年ですし(笑 以前GRBLをインストールしてモータドライバ基板の実験をしたものが残っていましたので流用です。
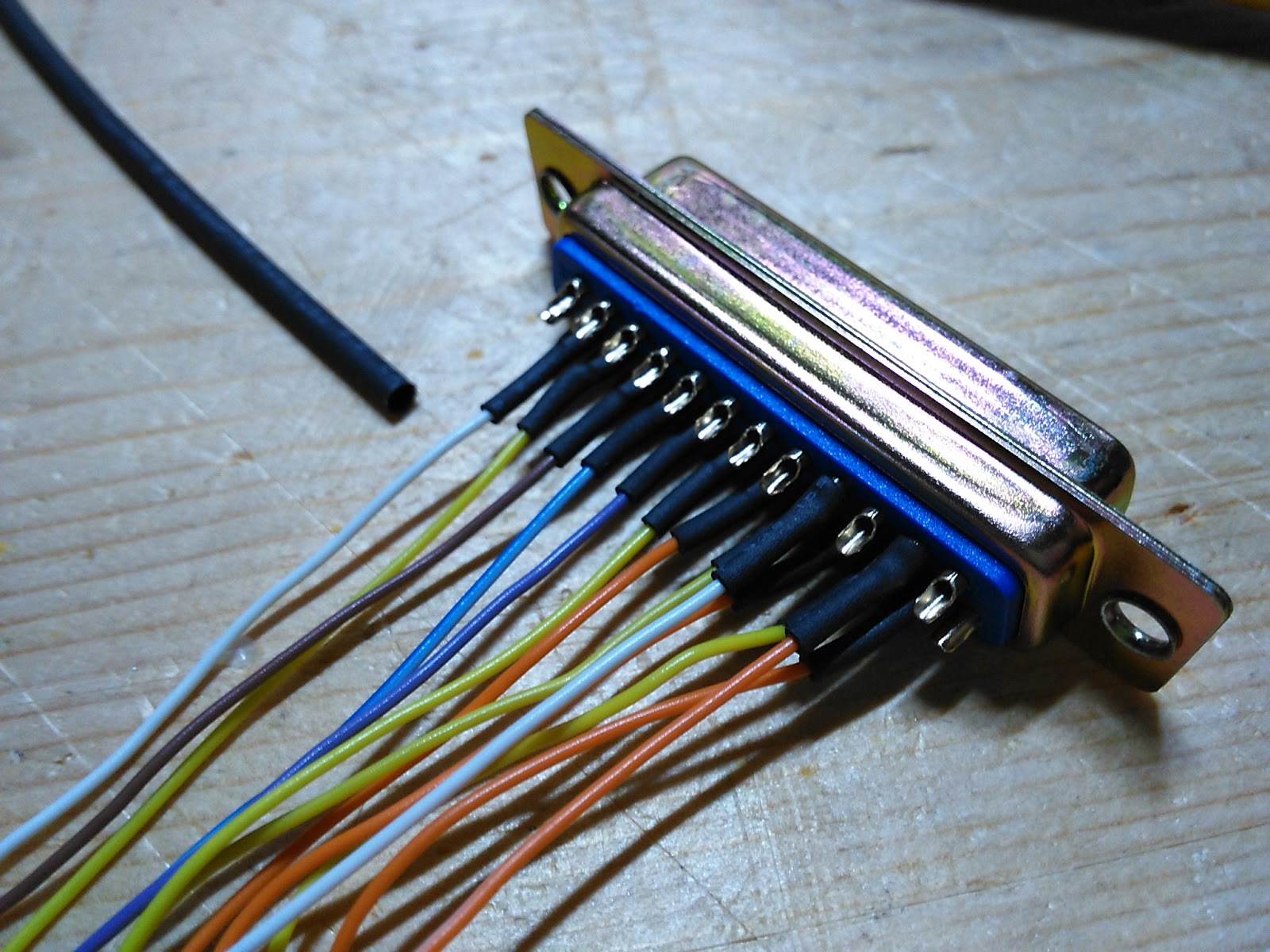
ピンヘッダ刺して、それにはんだ付けしたリード線をD-SUBコネクタに接続していきます。
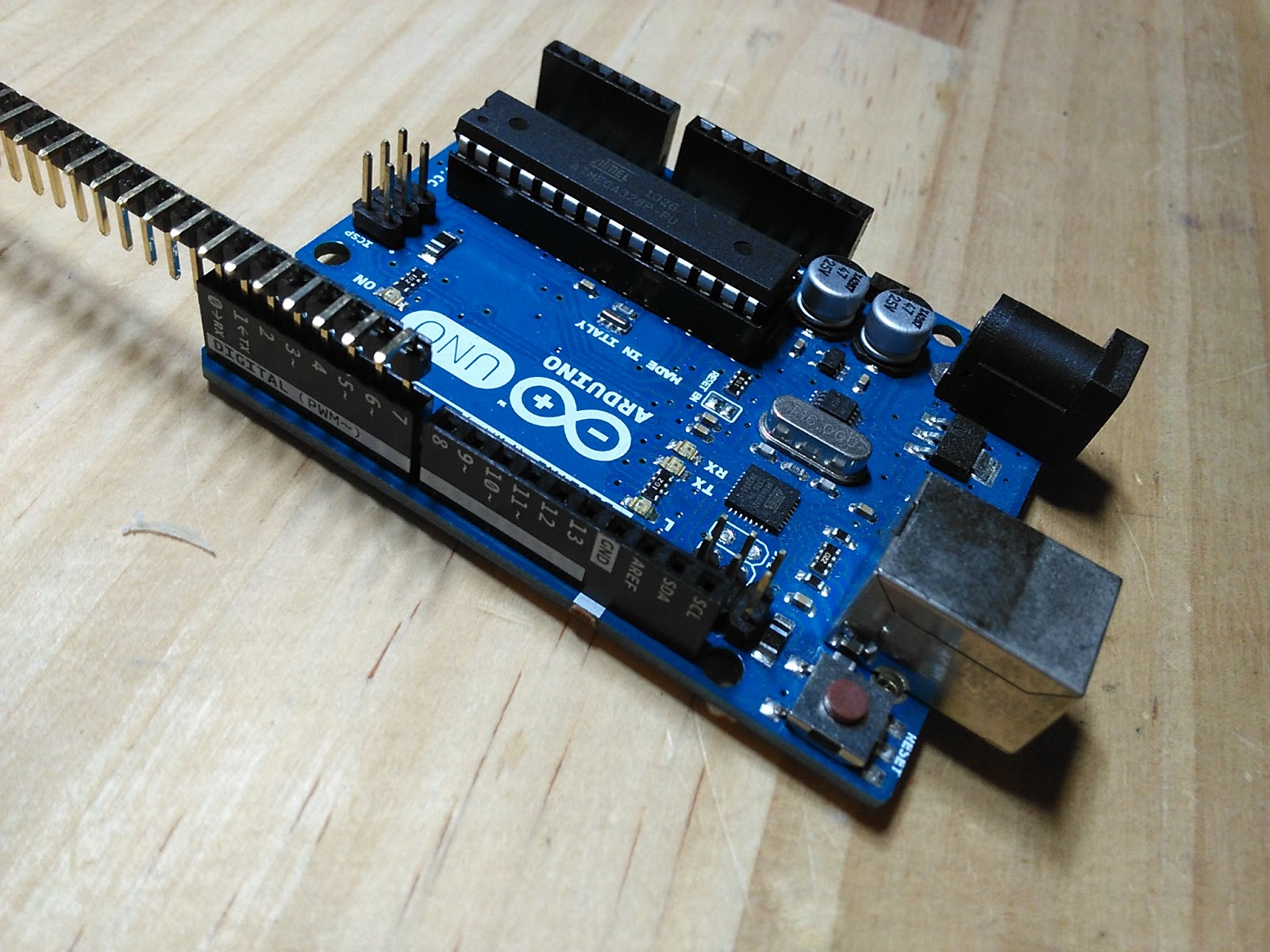
使うのはこちら。カホパーツのジャンクコーナーで30円で購入したもの。

GRBLのピンレイアウトはGitHubのGRBL wikiにあります。
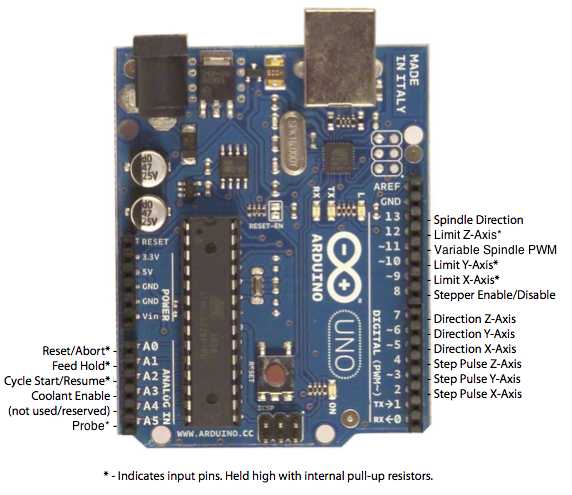
GRBLはVer1.1を使いました。1.1ではそれまでON/OFF制御のみであったスピンドルがPWM制御できるようになった。つまりGコードでスピンドルの回転を制御できるようになったということで、調査のところでちらっと見たPWMというコネクタが活きるかもと思っての選択です。
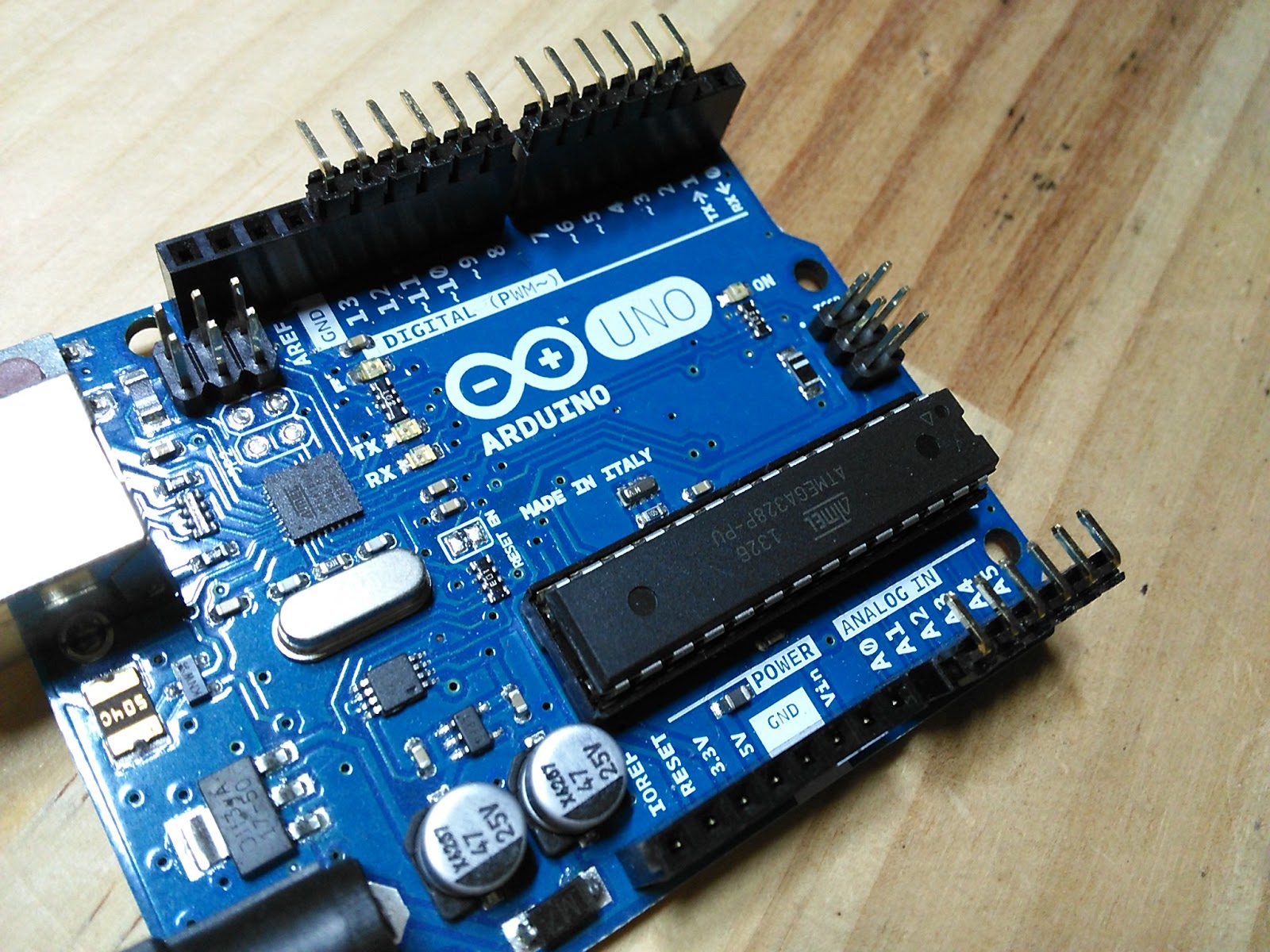
たくさんの種類の配線が這いまわりますので、ジャンク配線材を活用しながら色をたくさん使って接続していきます。


配線材はこんな感じでいいかな。
お次は箱です。
裸のまま、あるいはアクリル板にねじ止めした程度でもよいかと思ったりしましたが、CNCは切削屑を周りにまき散らしますので、この先アルミを切削した時に切粉で短絡など起こさないようにきちんと箱に入れることにします。
いくつか箱持ってきてレイアウト検討します。

スペースに余裕があるのはプラケースですが、モータ制御であることを考えるとできるだけシールドがしっかりした金属ケースを使いたいところ。


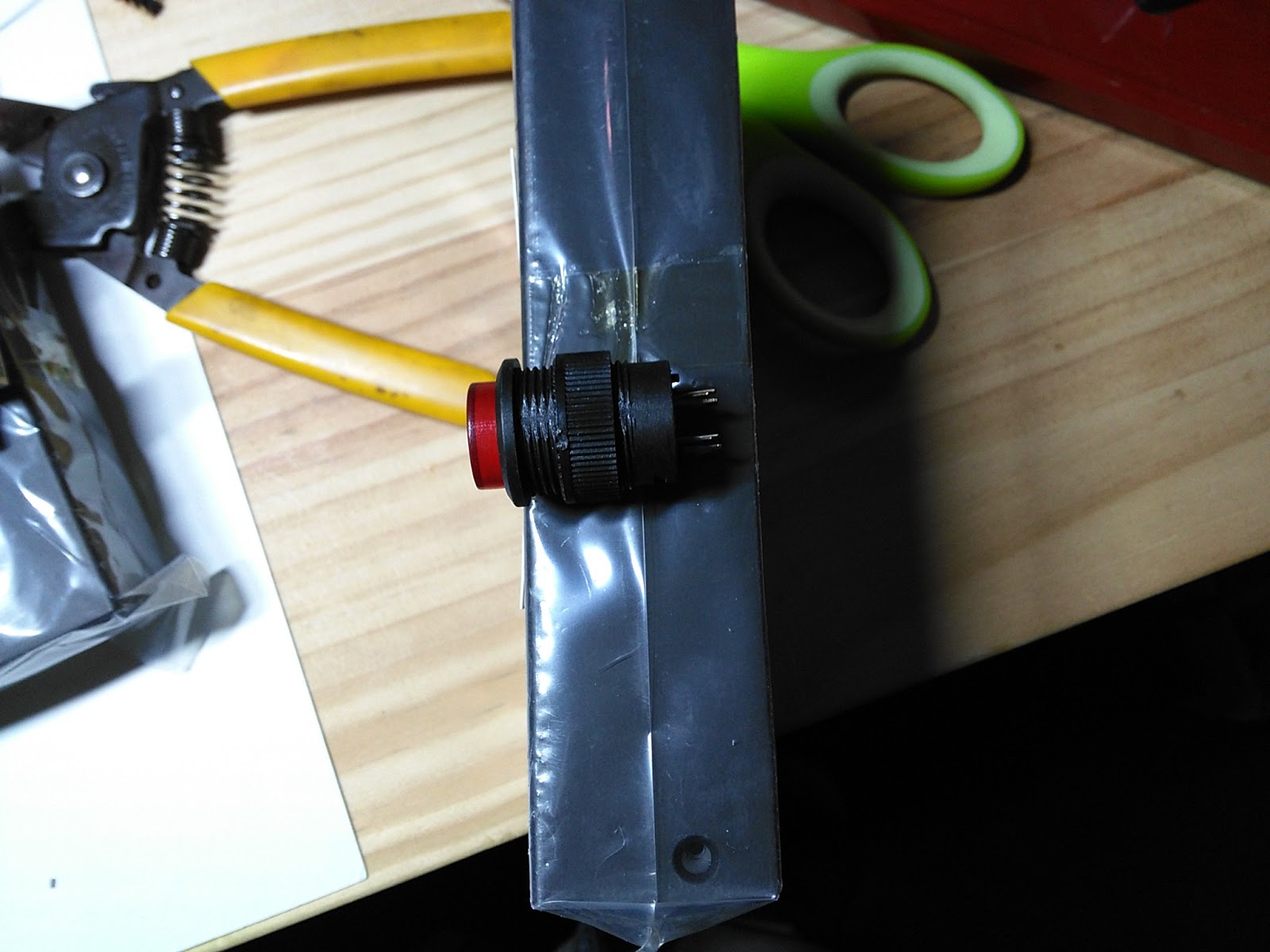
スイッチも一つつけておきましょう。
非常停止はCNCの制御BOXについていますので、それ以外の用途として一時停止を割り当てることにします。

Aitendoで買ったこれでいいかな。

ギリギリですが収まりそうです。
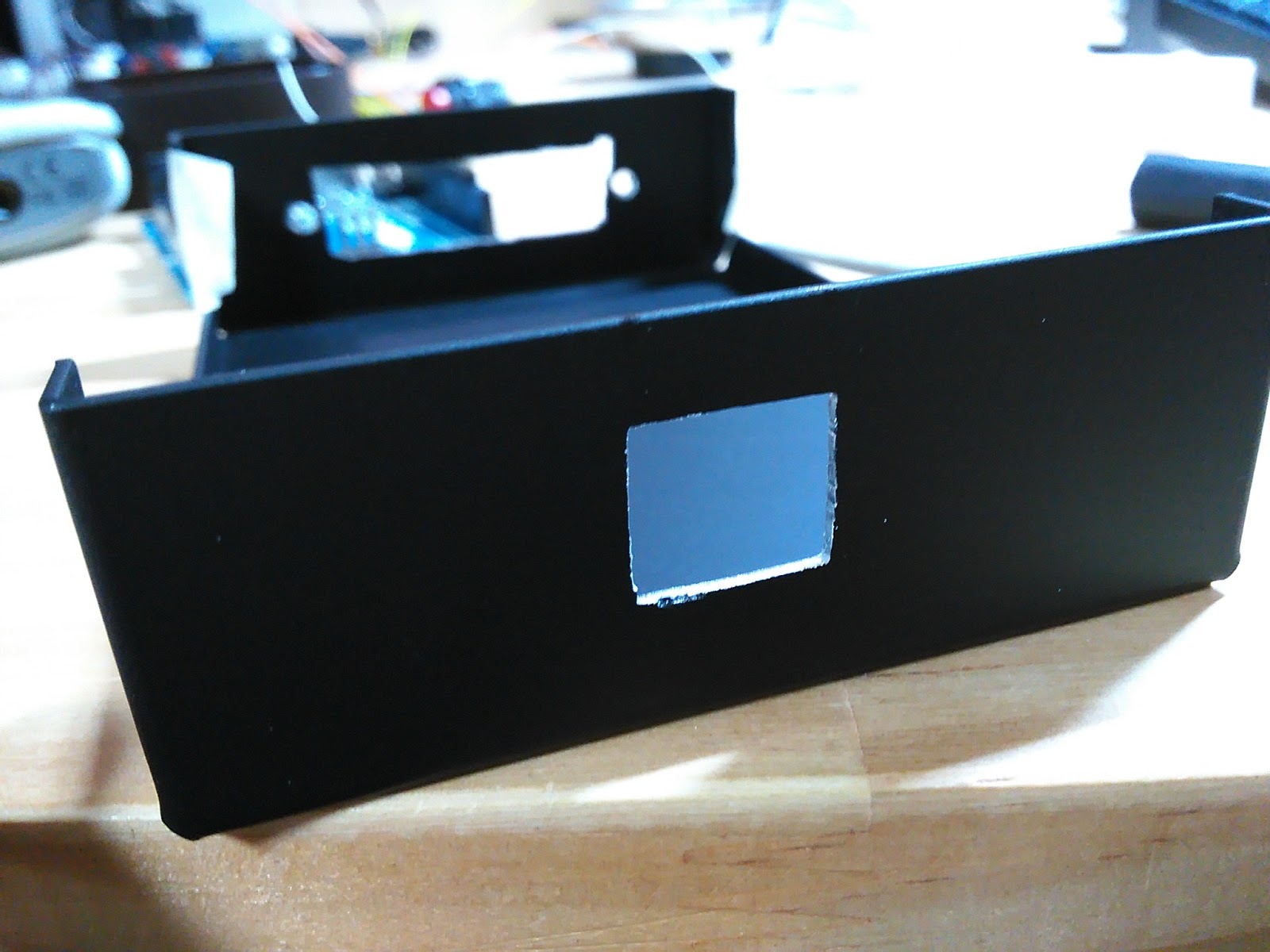
ケース加工に入ります。Arduinoのケース内配置を決めてUSB角穴をあけます。

こちらはD-SUBコネクタ用のでっかい穴。


やすりで形を整えて、切り口を黒マジックで塗れば完成。

D-SUB側は穴が大きくて大変ですが、頑張って開けます。
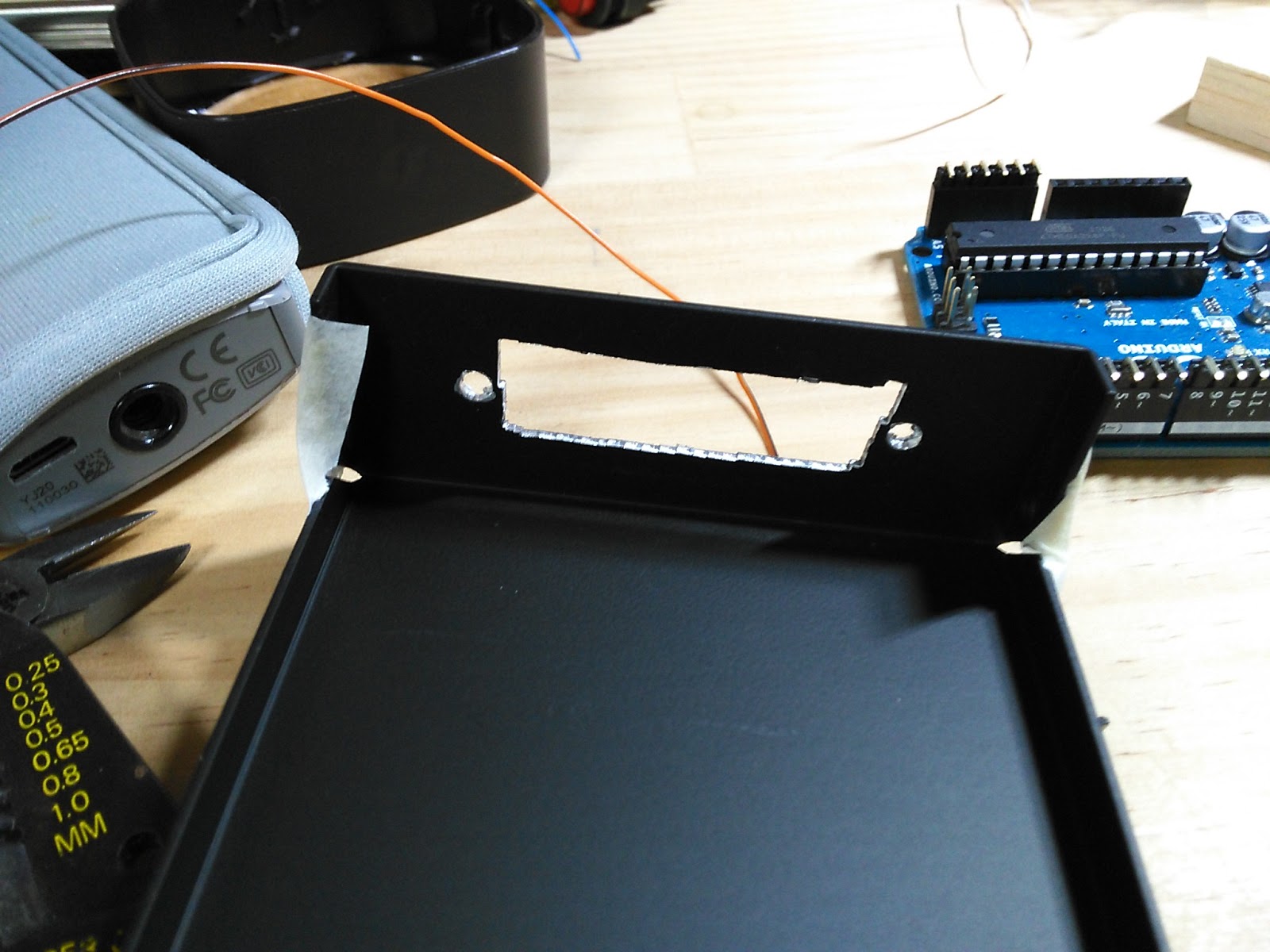
いい感じであります。
両方の穴が開きました。
次はArduino固定用の穴です。ArduinoUNOの基盤穴は「開けられるところに開けた」感じの位置になっていますので、図面からやるより現物合わせが早くて楽です。
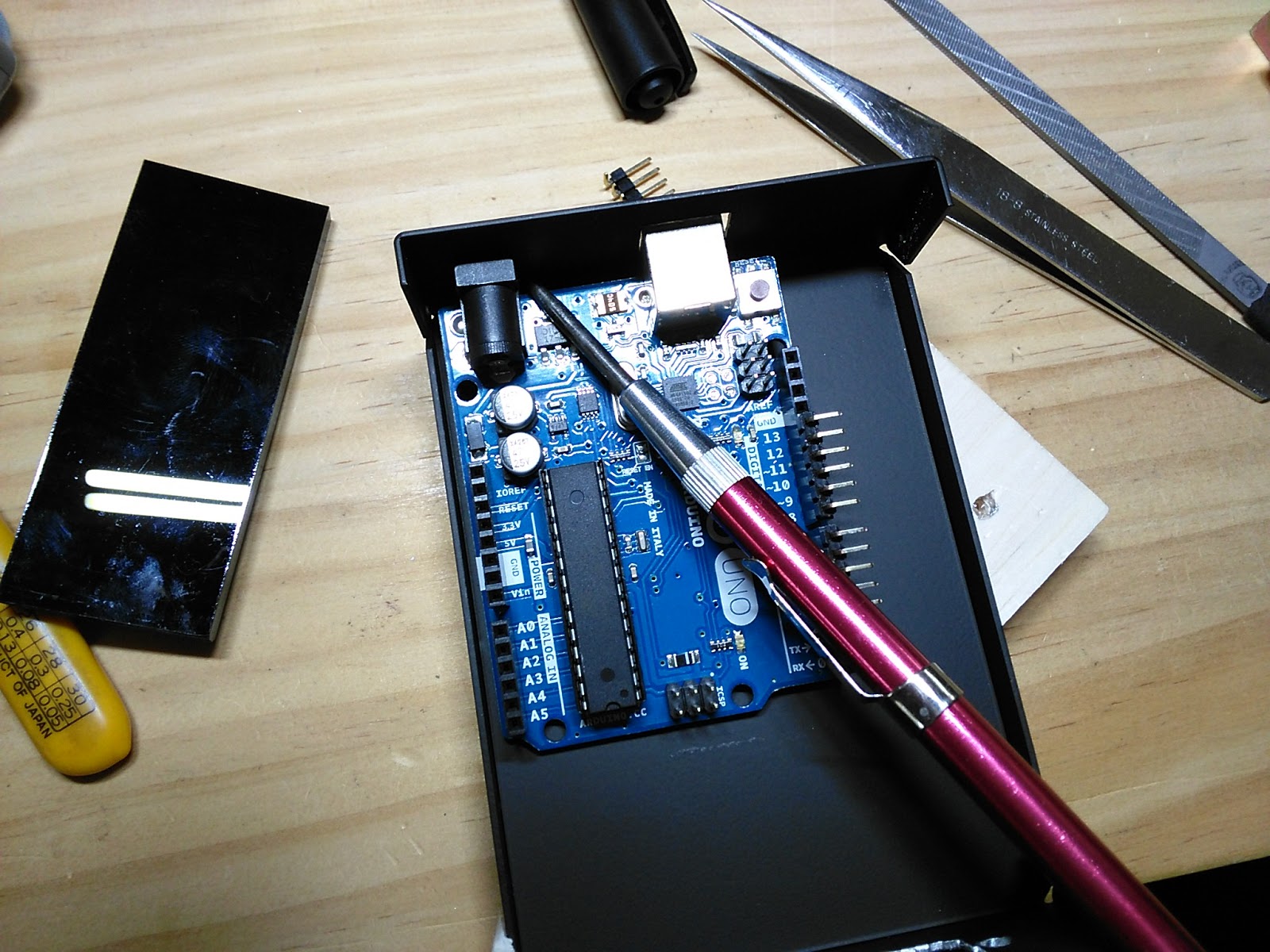
固定されました。ナットが効かない穴もありますので、止めているのは一か所のみで、あとは刺しているだけです。が、十分な強度で固定されます。

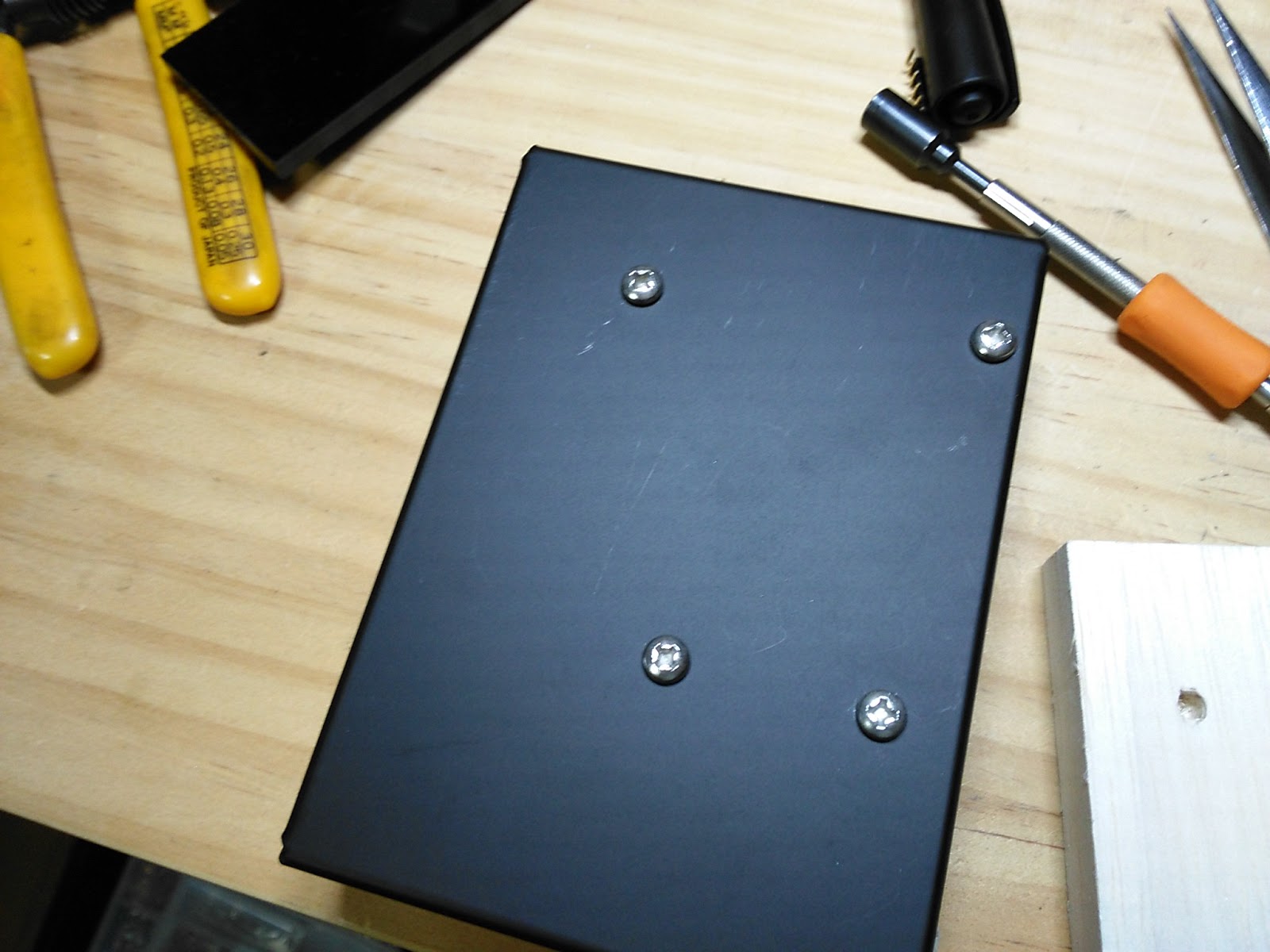
裏から。
USB口。
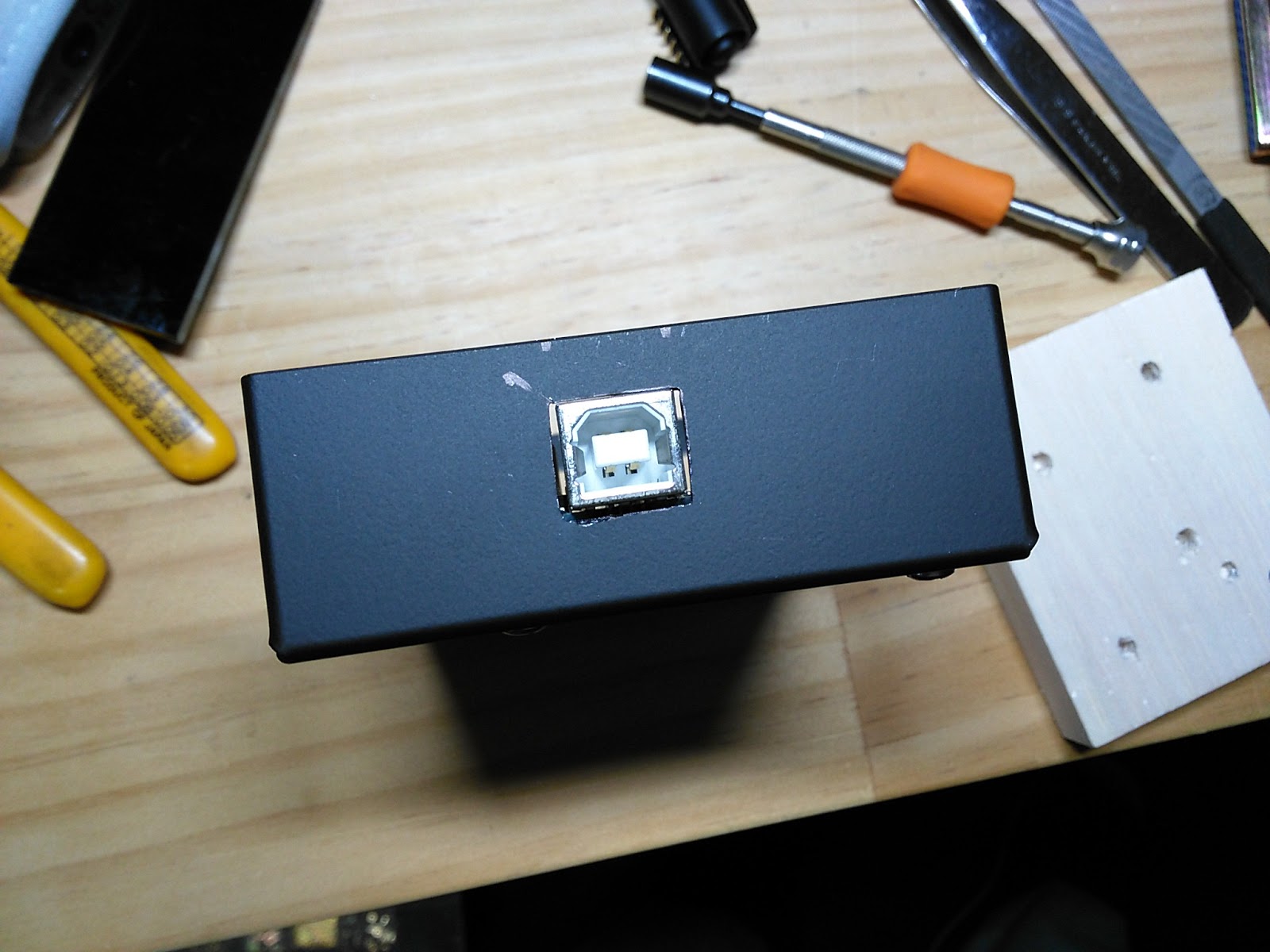
面位置でドンピシャに決めようなどと欲張らずに、ポートを少し飛び出させるのがコツです。
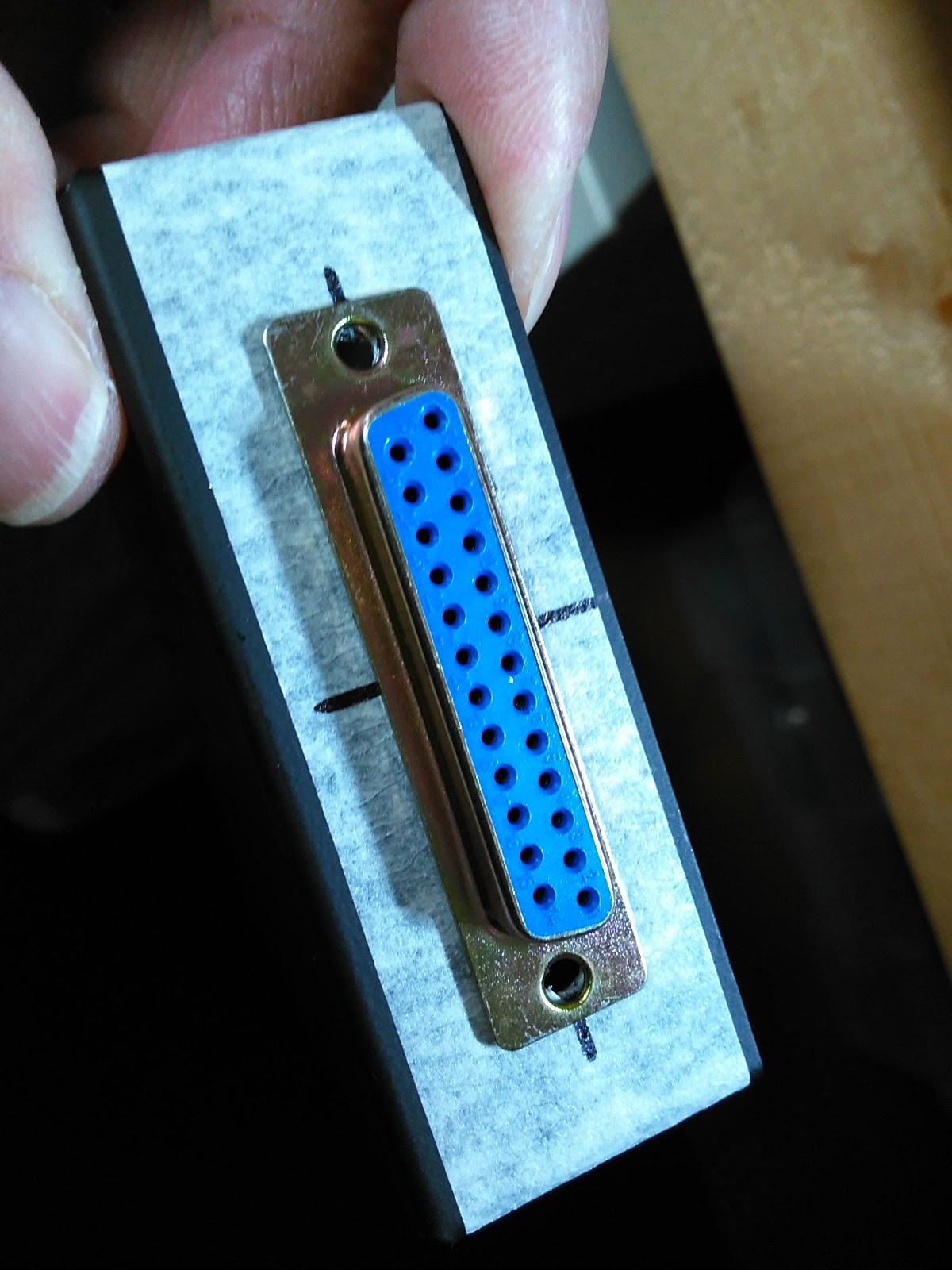
D-SUB側に移りますが、その前に、
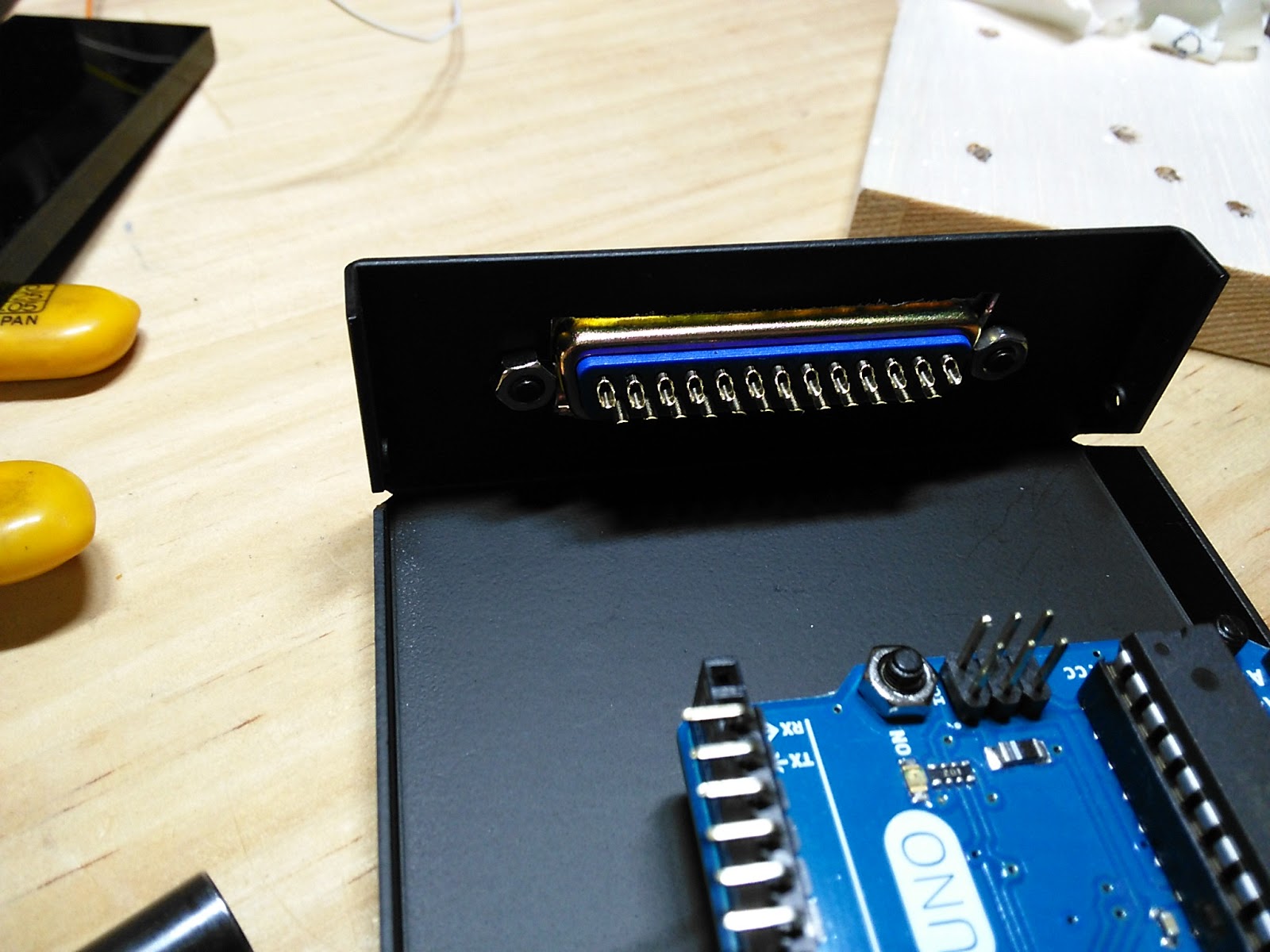
コネクタを仮固定して、

一旦蓋閉めてあたりを見つつ、

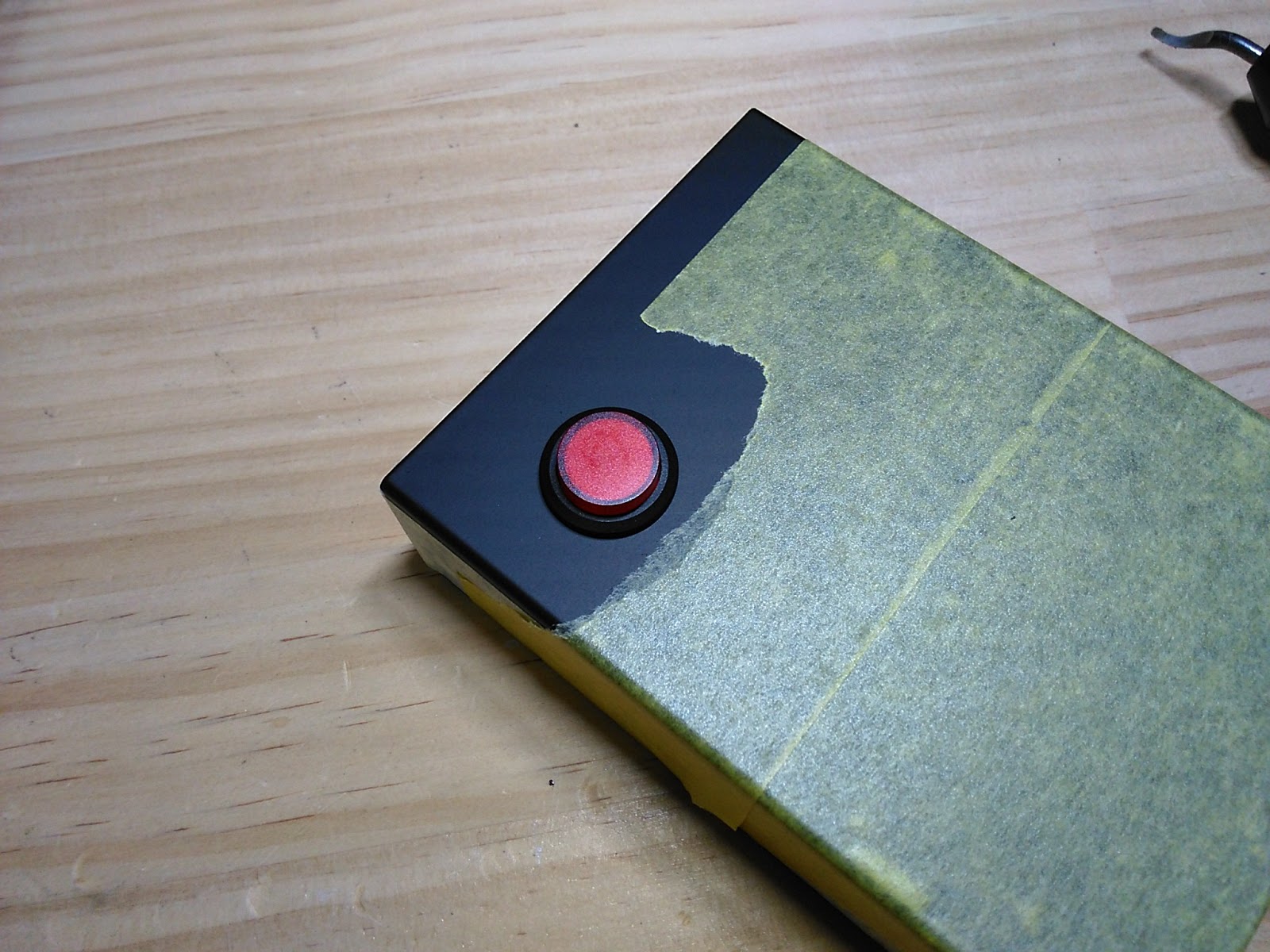
スイッチを取り付ける位置を決めます。

化粧面ですので傷がつかないようマスキングテープを貼って、
決めた位置にポンチでくぼみをつけます。
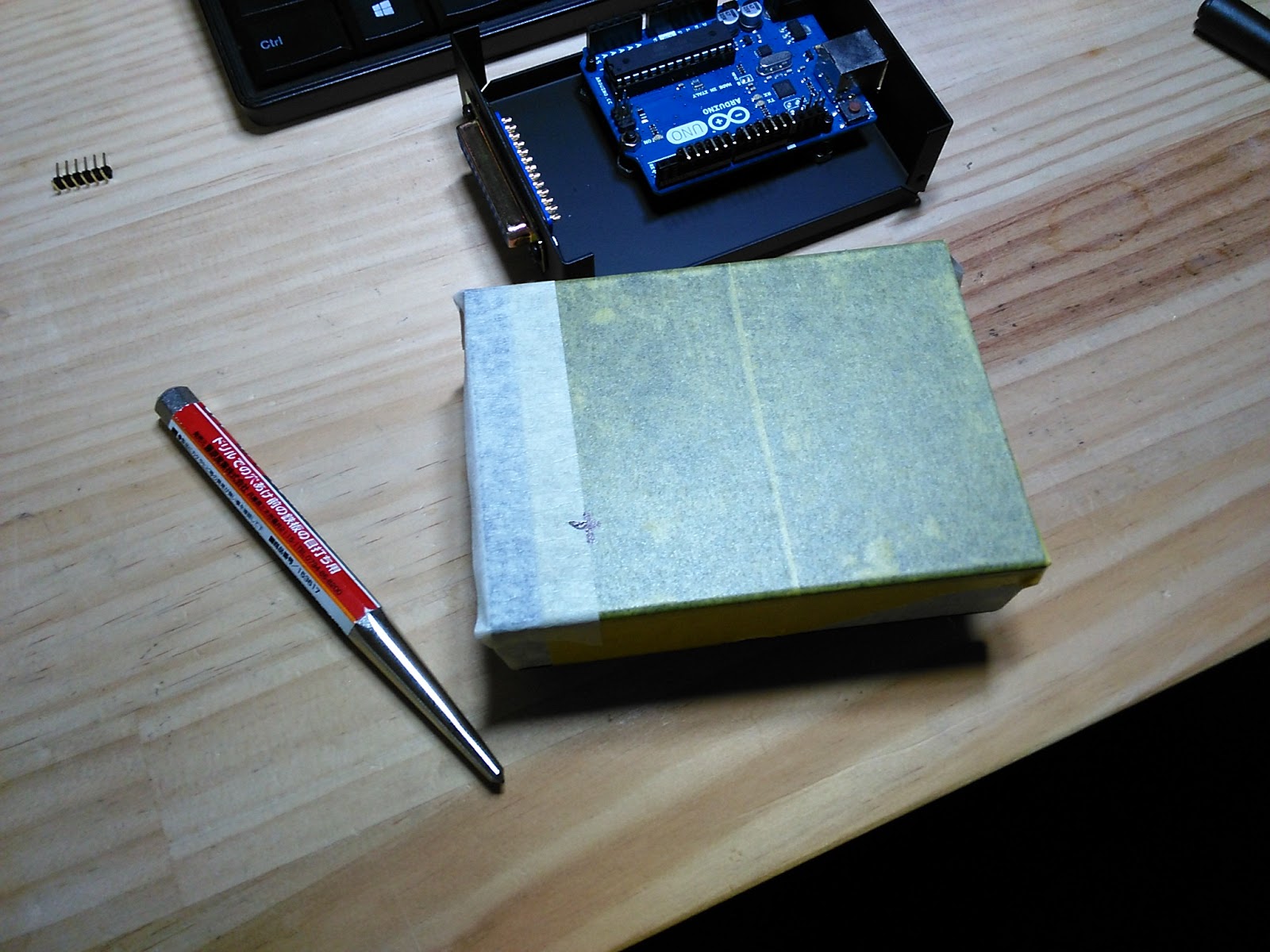
6φドリルで下穴を開けて、

スイッチの

胴回りサイズを確認したら、

リーマーで、

穴を無理やり広げていきます(笑

スイッチがやっと入る程度の大きさまで広げたら、バリを取って仕上げます。

今回はきれいに開きました。リーマー使っているのになぜか穴が六角形になることが多いのです(笑

完璧。
裏も問題なし。

ギリギリですが閉まるようです。

さて、ここまで確認したらいよいよD-SUBへの配線です。
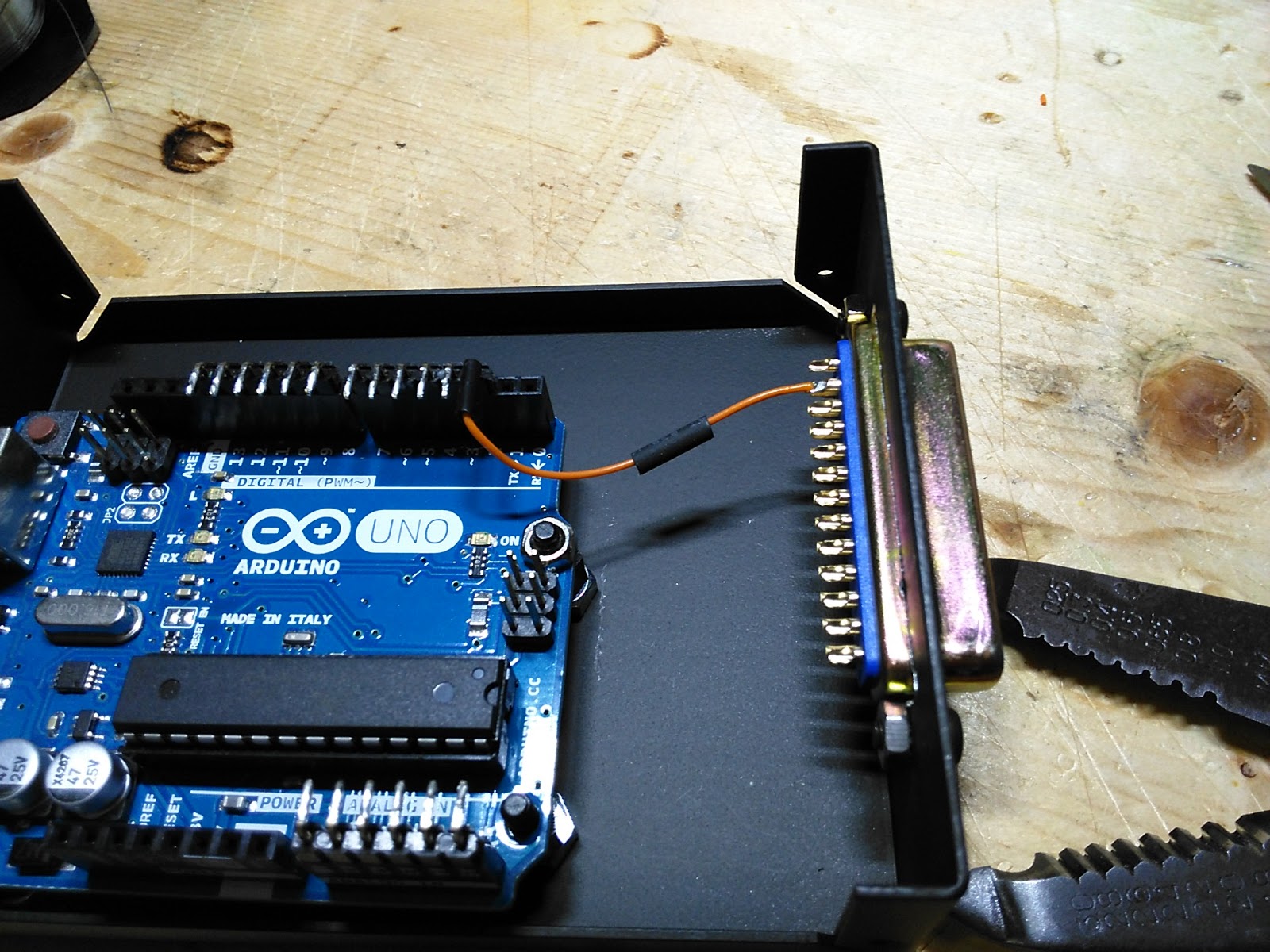
かき集めた情報をもとに配線を行います。
はんだ付けがむつかしい下の段は、一旦コネクタを外して、
ひっくり返して、

配線していきます。こちら側はそれほど多くありません。
GNDを配線するのを忘れずに。そのために金属箱を使うのですから抜かりなく接続します。
スイッチ配線を行えば完成。とりあえずFeed Holdにつないでみました。
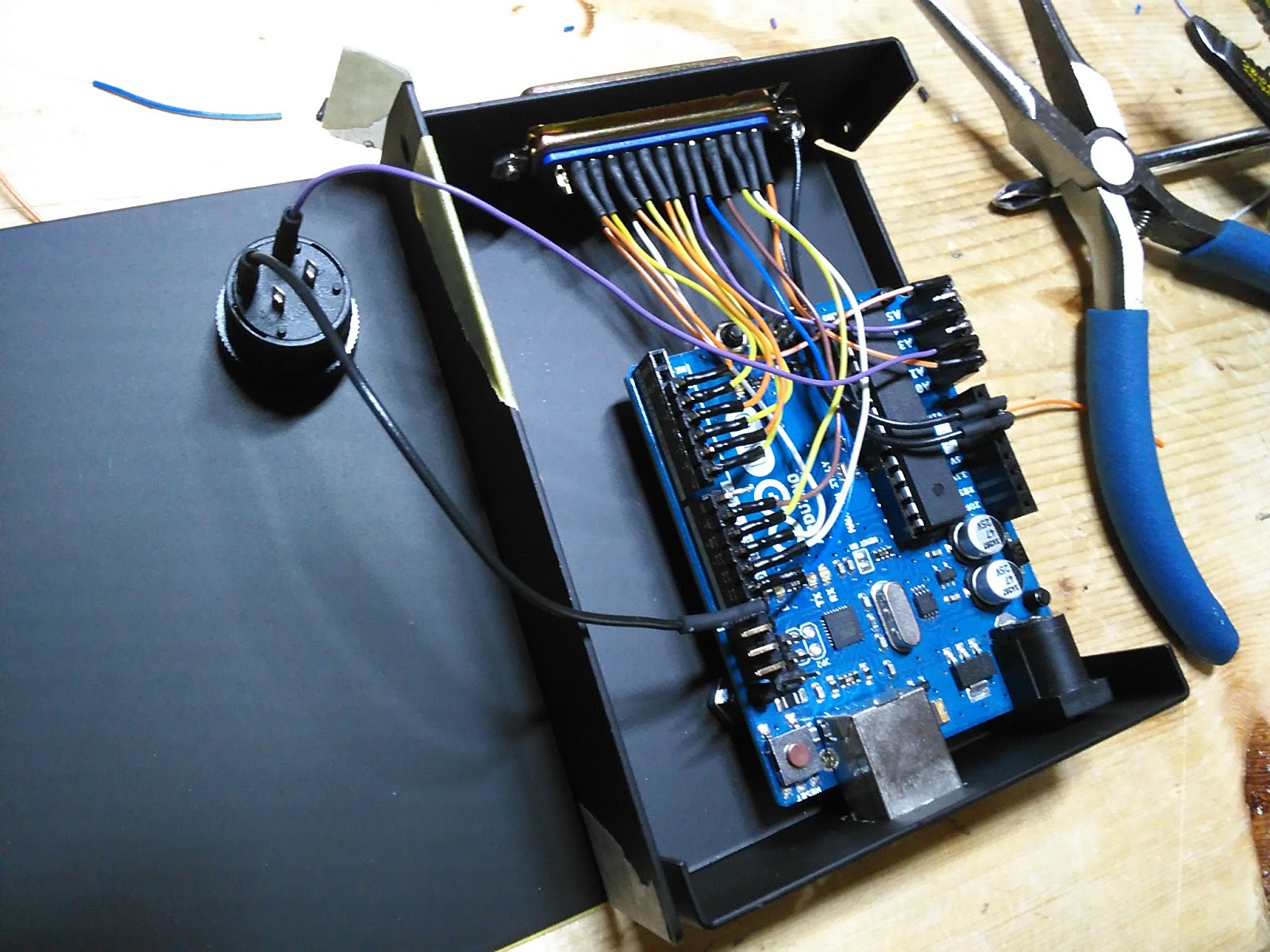
ねじ絞めて出来上がり。

ええ感じです。

お次はケーブルの加工です。
D-SUB25ピンといえばプリンタケーブルですが、プリンタケーブルがD-SUBコネクタになっているのはPC側だけで、プリンタ側はアンフェノールタイプ(セントロニクスタイプ)コネクタがついていますので、そのまま使うことはできません。
さらに、CNCの制御BOX側のコネクタもオスピンですので、構成は、
[GRBL on Arduino]– D-SUB25ピンオス—-D-SUB25ピンメス–CNC制御BOX
となり、必要なケーブルは
D-SUB25ピンオス—-D-SUB25ピンメス
となります。しかも25ピンの半分以上を使いますので、全結線ケーブルが必要です。
で、持ってきたのは何やら素性が不明のこのケーブル。古いモデムケーブルかな。

D-SUB25ピンですが、両端オスです。全結線されていることはテスターで確認済みです。
切断しますのでどうでもいいですが、結線はストレートでした。

ということで、CNCの制御BOXのコネクタには刺さりません。

ので一端をこのメスコネクタと入れ替えます。買っててよかった30円コネクタ。

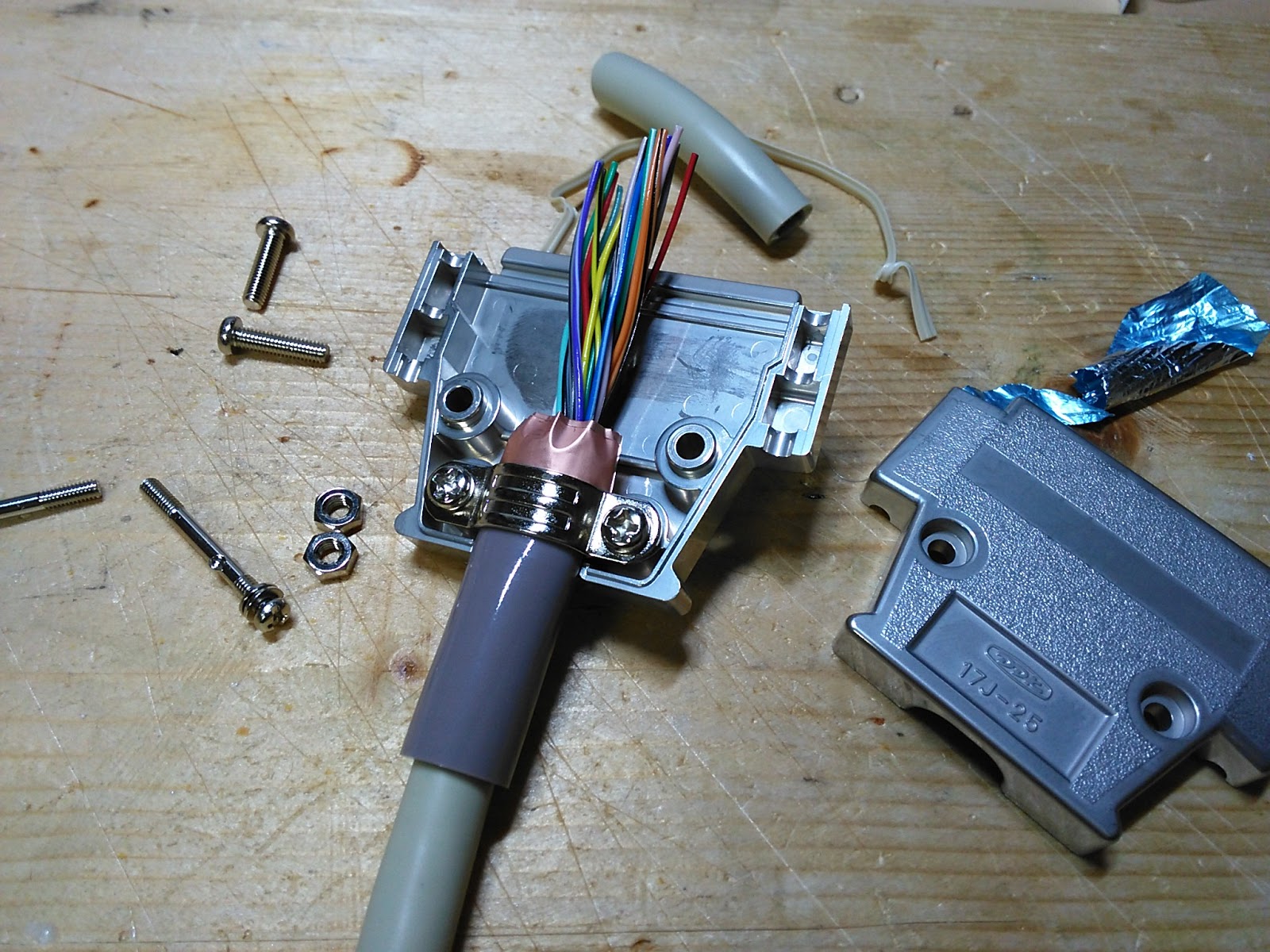
サーカス配線では怖いし、ノイズも心配ですので、このコネクタケースに入れます。
このケースが500円近くするという(笑

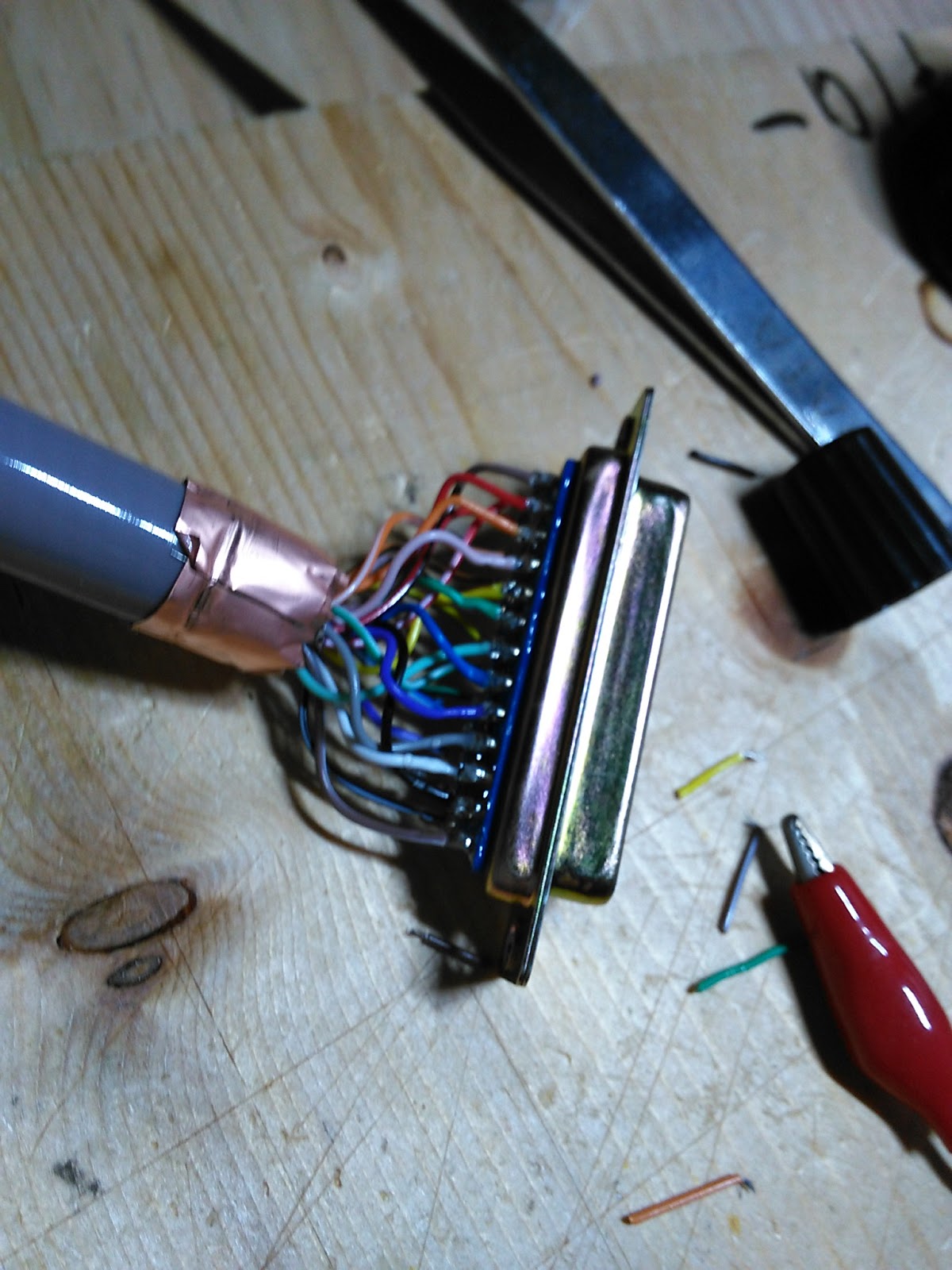
躊躇なくケーブルを切断してシールドを曲げこんでコネクタ付属の銅テープで末端処理します。

ハウジングに仮止めして、一本一本反対側のオスコネクタピンとの結線を確認しながらはんだ付けをしていきます。
この結構面倒な作業をやったのが大晦日の夜でした。紅白も見ずに(笑
こちら側は熱収縮チューブを使わずに、接続状態を確認したのちに全体をUVレジンで固めました。100均のUVレジンはほんに重宝します。これはSeriaのやつかな。

改めてハウジングに格納して、
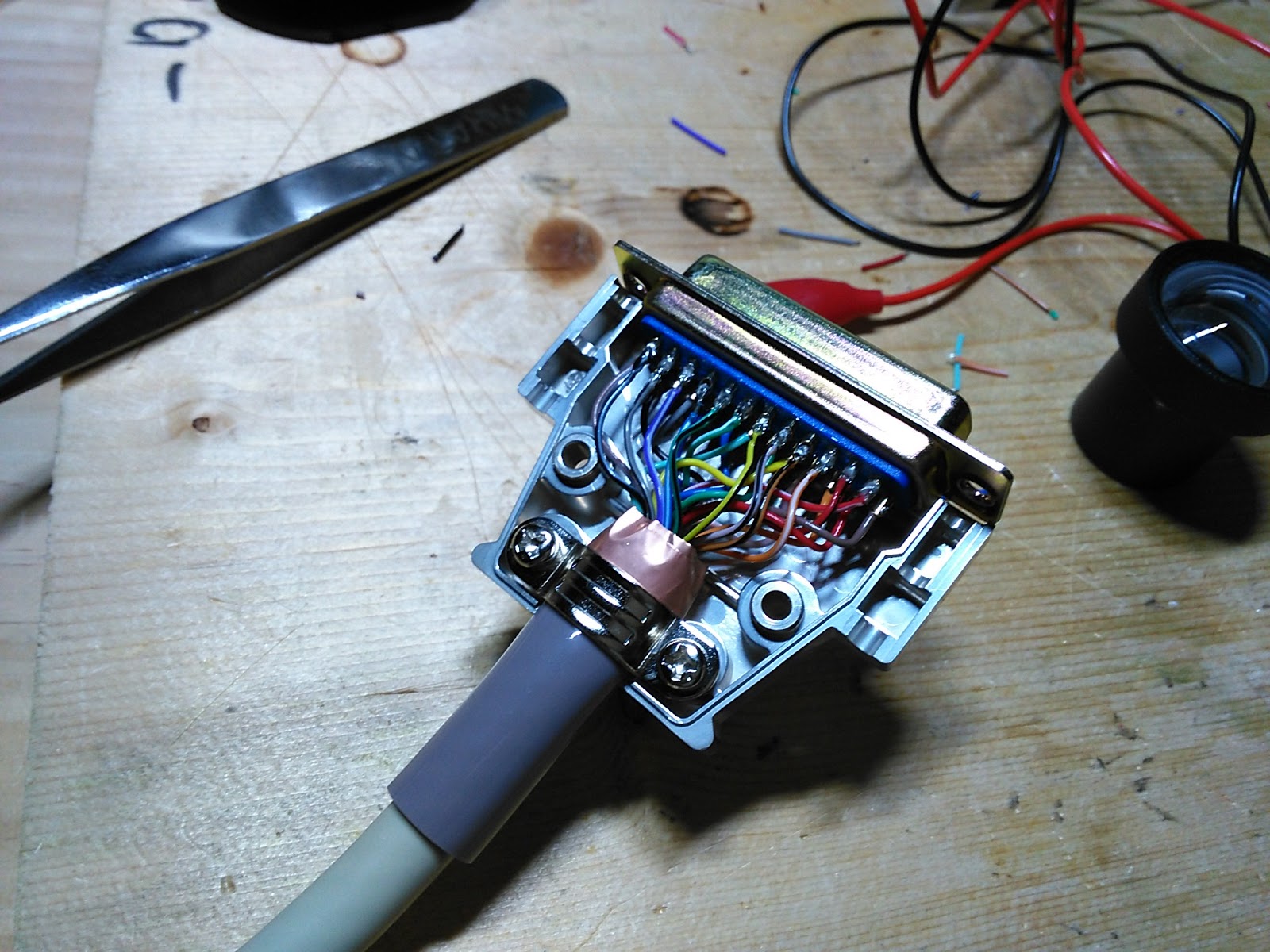
ねじを締めれば完成。

我ながら美しい出来であります。

接続できることを確認。
