
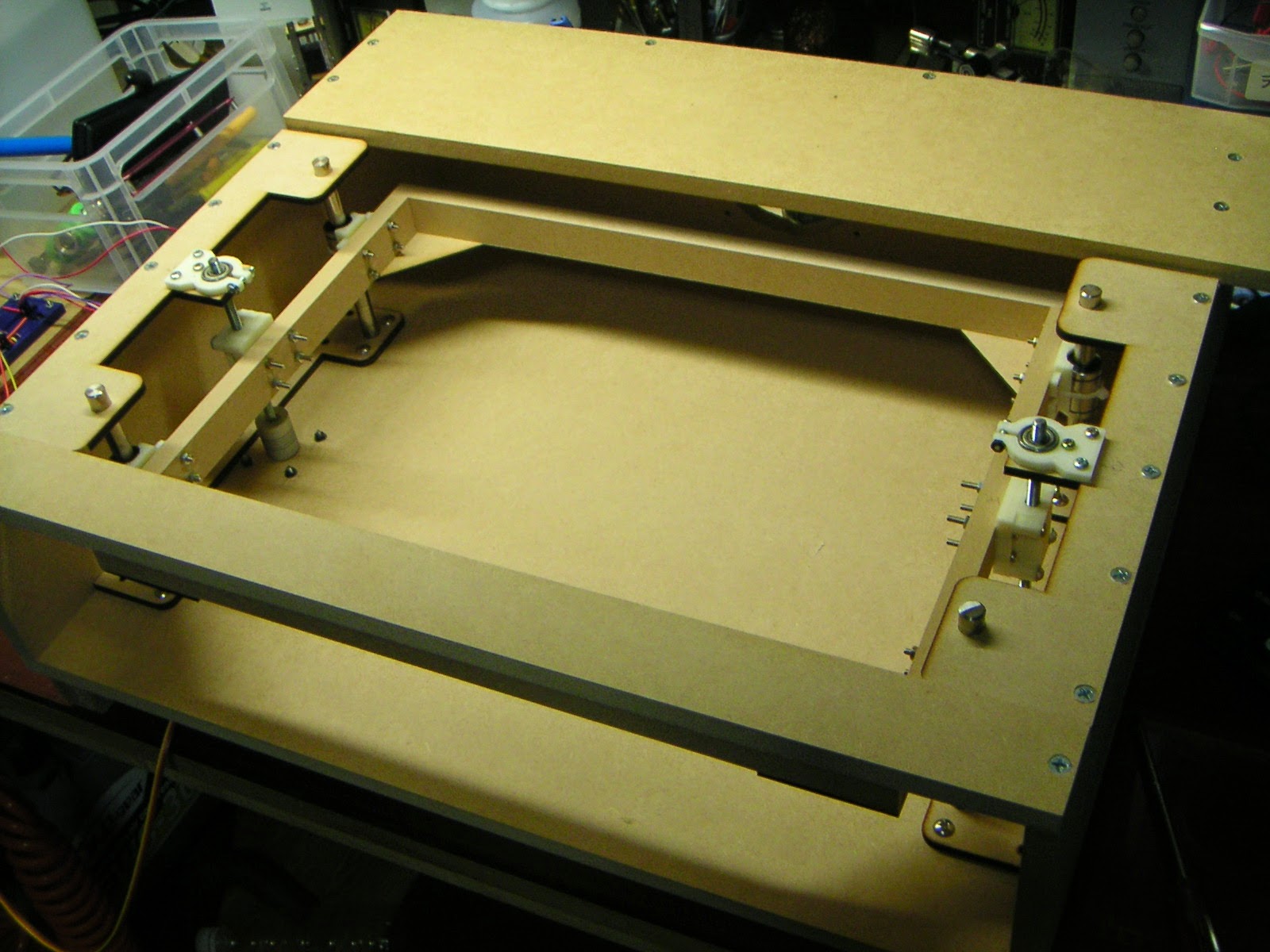
Zステージのステッピングモータに結線して昇降させてみます。
モータはプリンタやスキャナから取り外したもので、4線の二相バイポーラです。モータドライバをいくつも使いたくないのと、配線を簡単にしたいという理由で二つのモータのコイルを直列に接続する予定です。

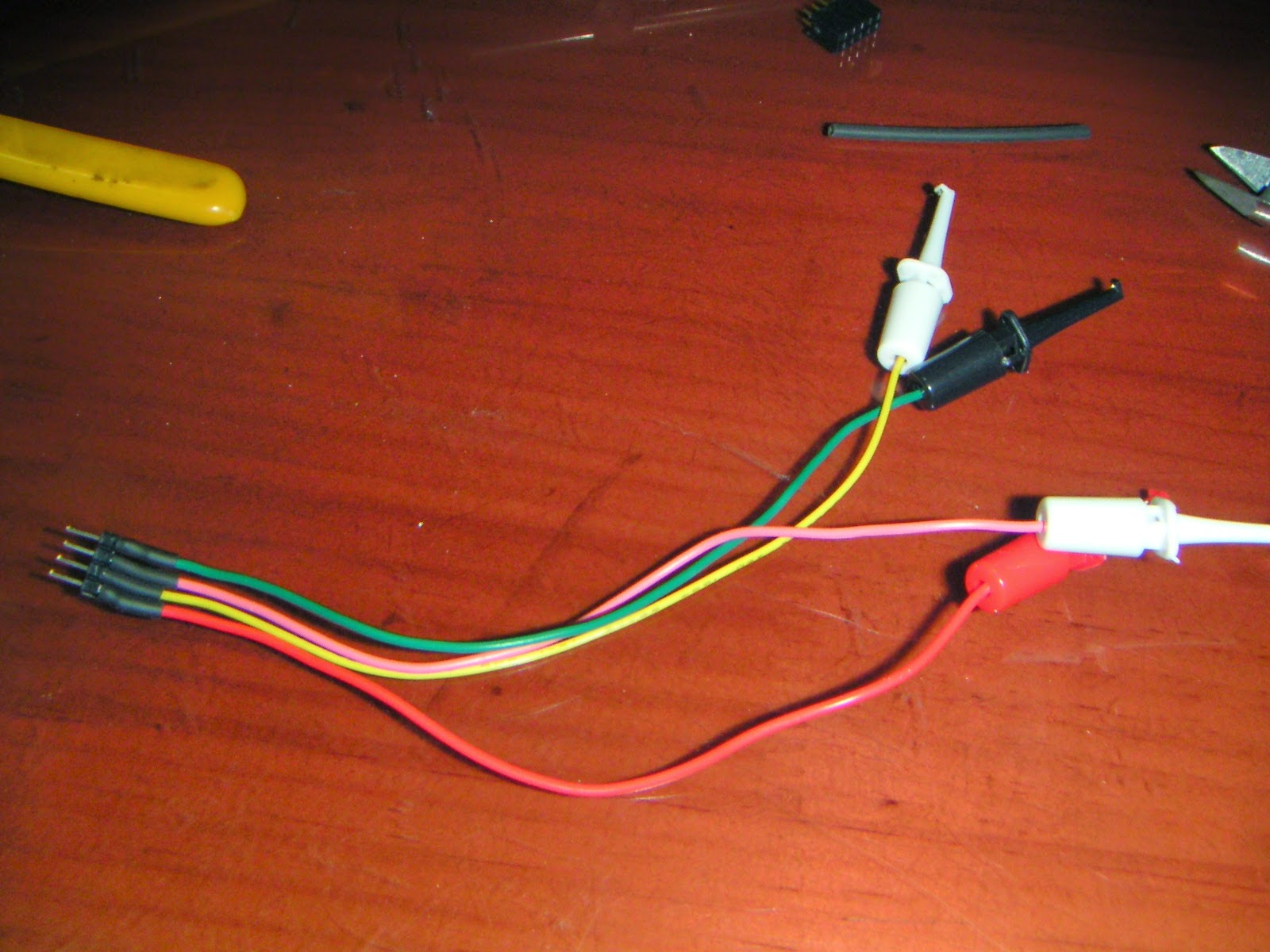
まずは回転方向など良くわかりませんので、それを調べるためにテストケーブルを作ります。モータドライバは壱号機のモノを使います。
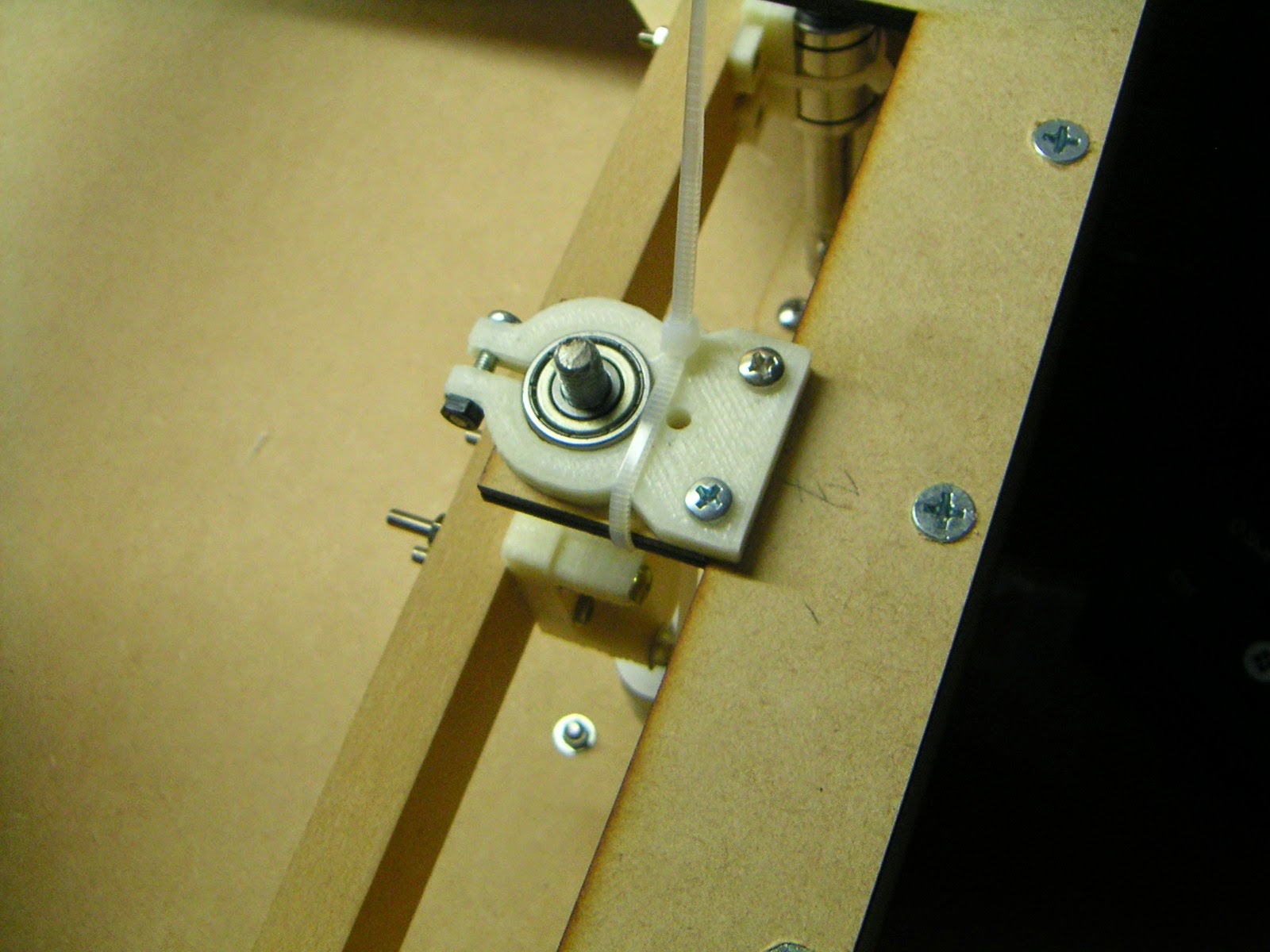
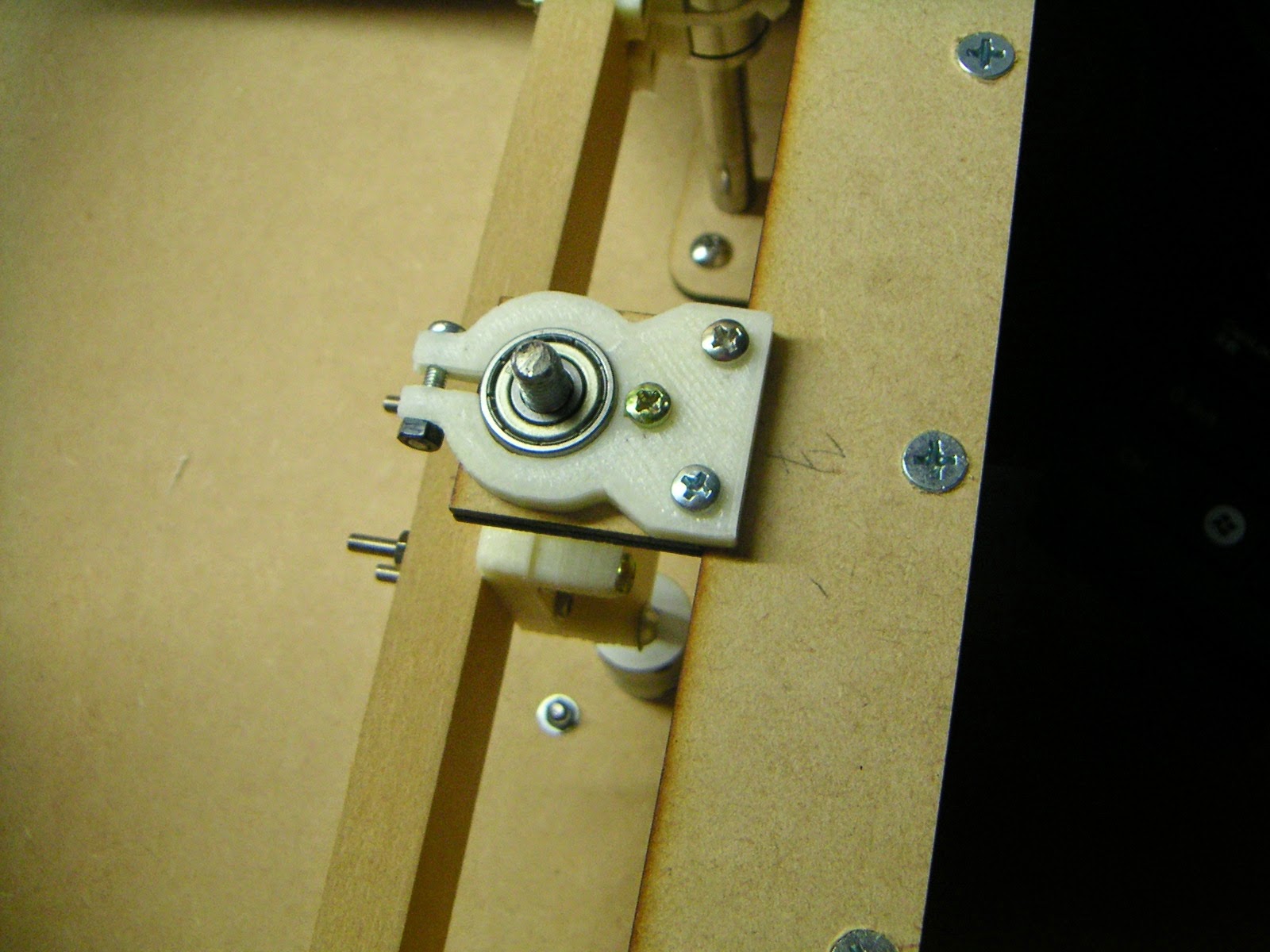
昇降させてみて無理のない位置に上部のベアリングを固定する予定。とりあえず今は仮置きしてインシュロックで止めておきます。
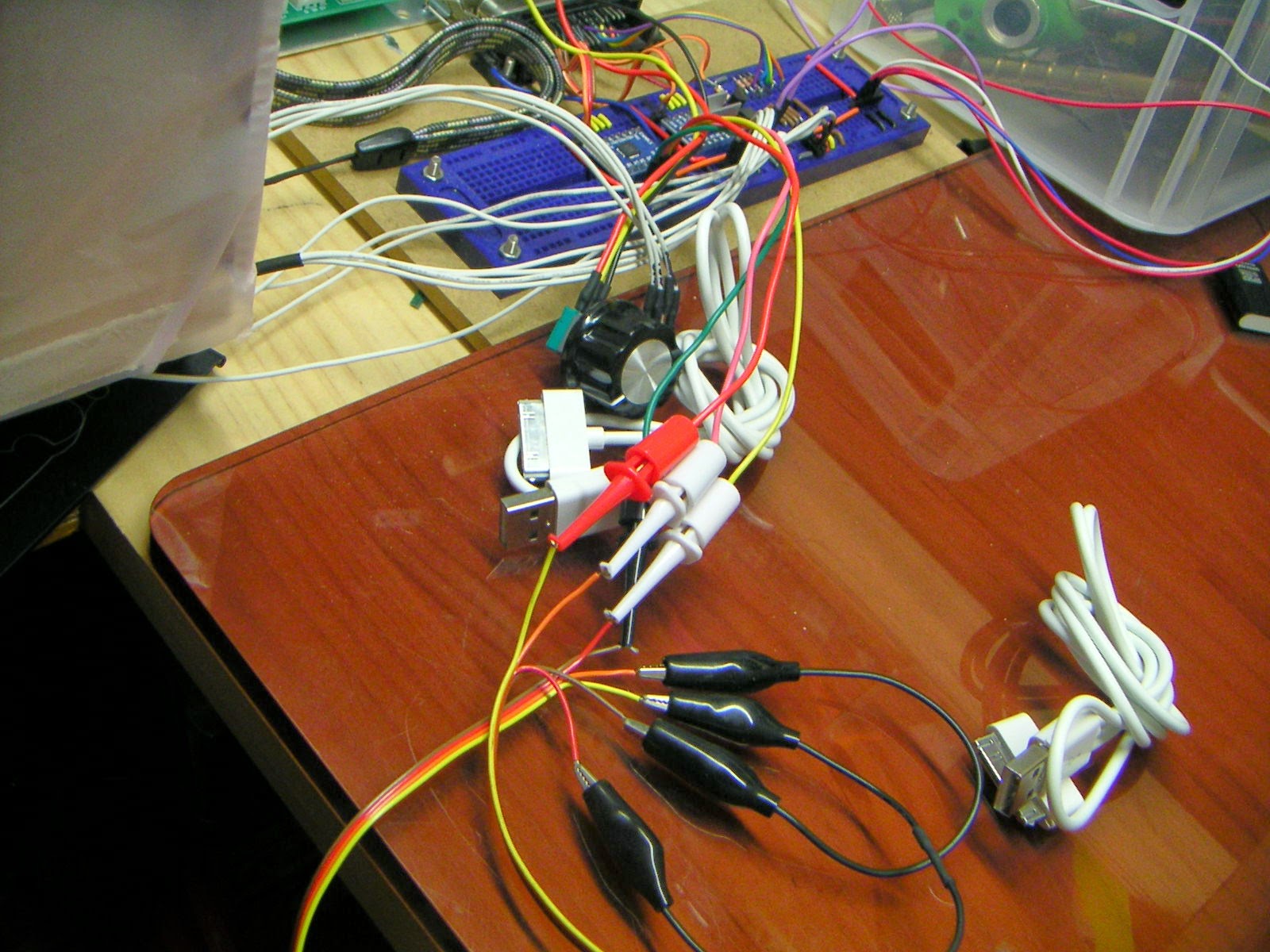
モータへの配線をします。ごちゃごちゃしているのでショートさせないように注意して。
動かしてみます。
なんかちょっとうにゃうにゃしています。まっすぐ動いていないですね。四隅にリニアブッシュを入れたらガタはなくなるだろうと思ったのですが、ちょっと甘かったようです。
板をはさんで平行を出しておいて、

もう少し早く動かしてみます。
やはりうにゃうにゃしています。昇降→固定という使い方なら良いかもしれませんが、カットしながら昇降させるような動作をする場合には影響が大きそうです。これはリニアブッシュを二連にする改造を考えておく必要がありますね。リニアブッシュをかっとかないと予備が二つしかありません。
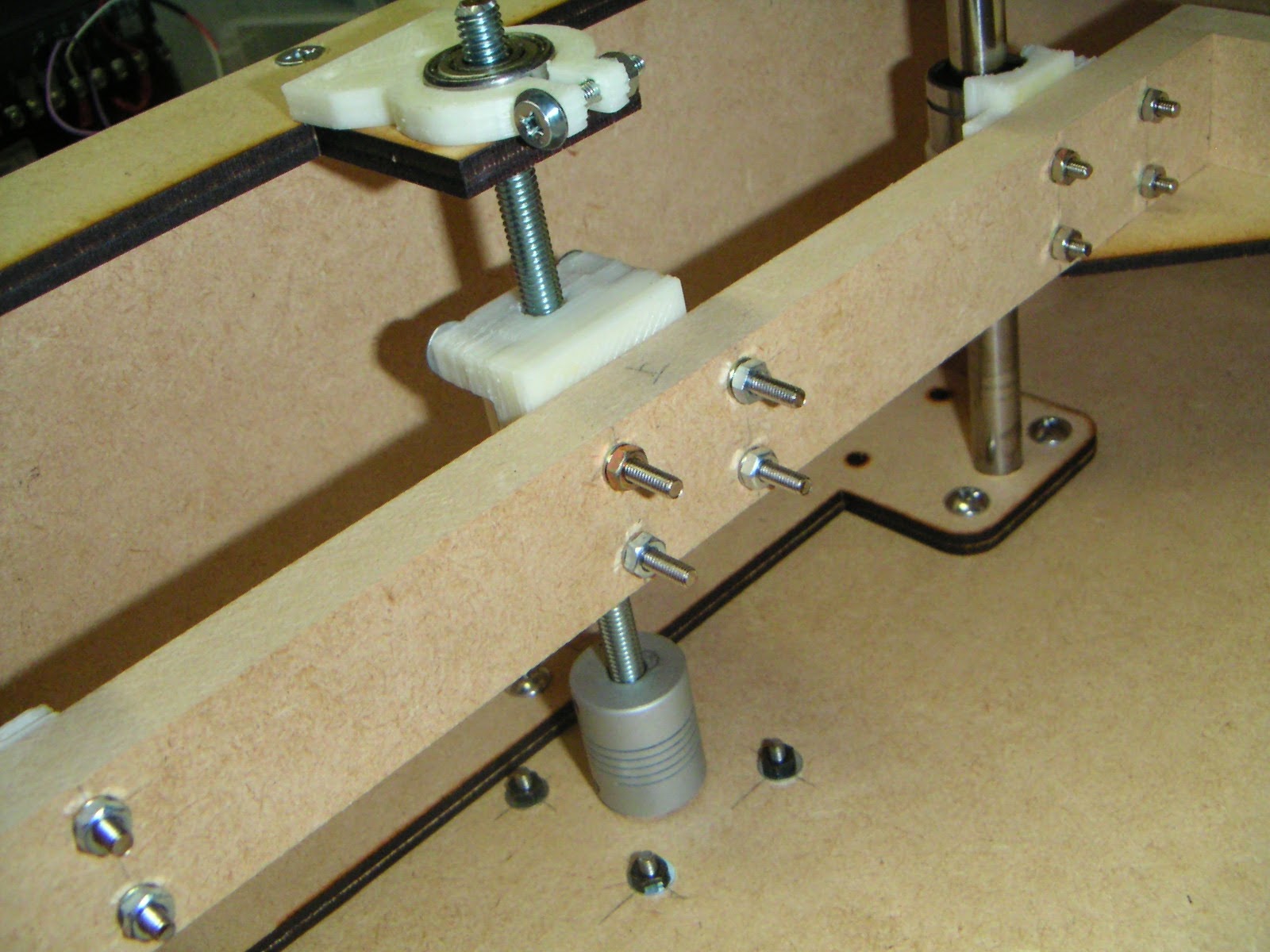
とりあえずこのあたりは後々対策するとして、ベアリングの固定を行います。
昇降させてみて無理のかからない位置を決め、ネジで止めていきます。
3つのタッピングで止めてインシュロックを外します。がっちり取り付けできました。
これでとりあえずZ軸のメカ回りは完成とします。制御をどうするかを考えておくことにします。
X/Y軸を乗せて位置確認。スライドさせるとY軸のリニアブッシュを固定しているインシュロックのつなぎ目がZ軸のパーツとちょいと干渉するようです。ということで、結び目の位置を変えて再固定。
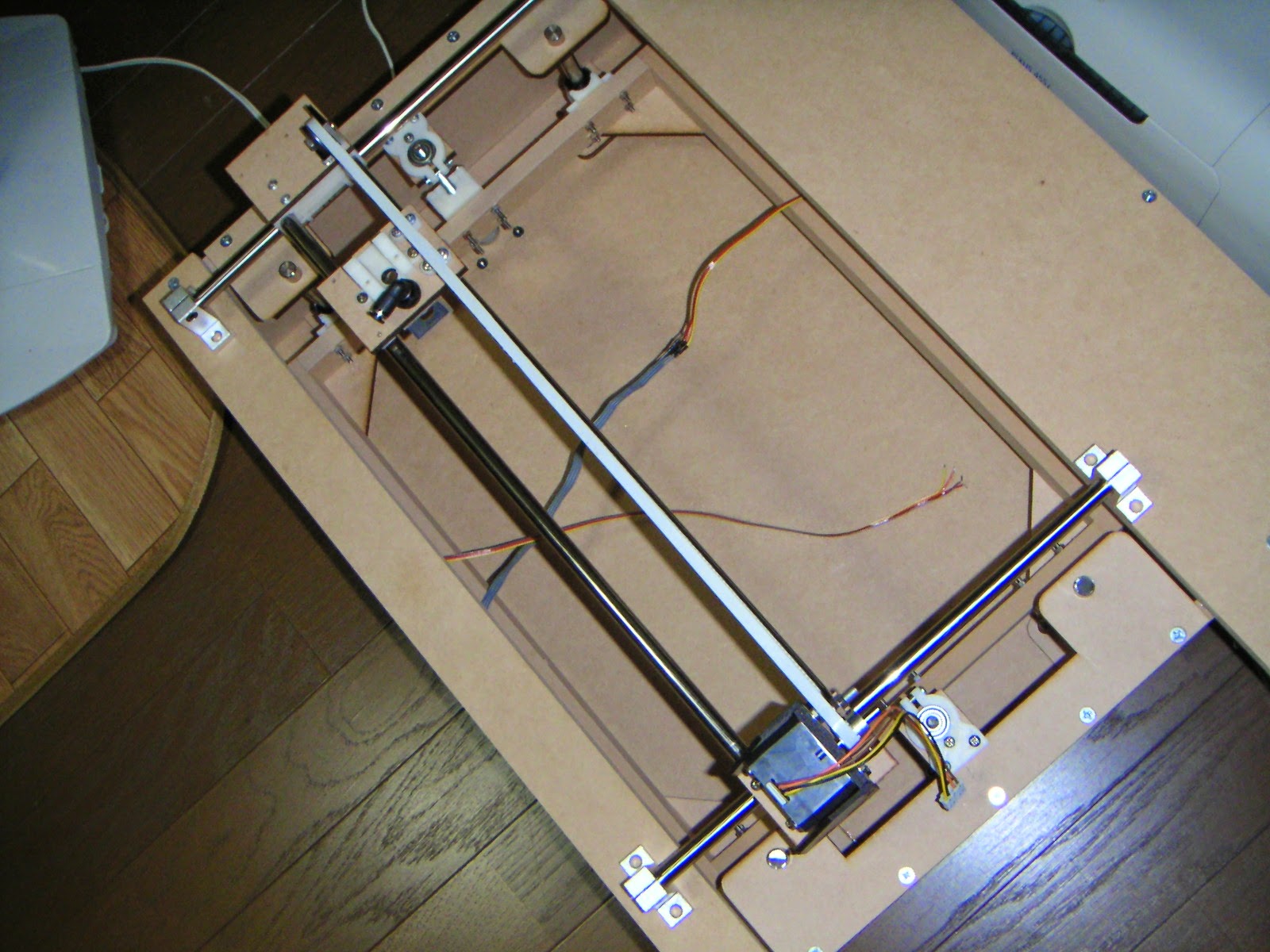
これでX/Y軸はスムースに動くようになりました。
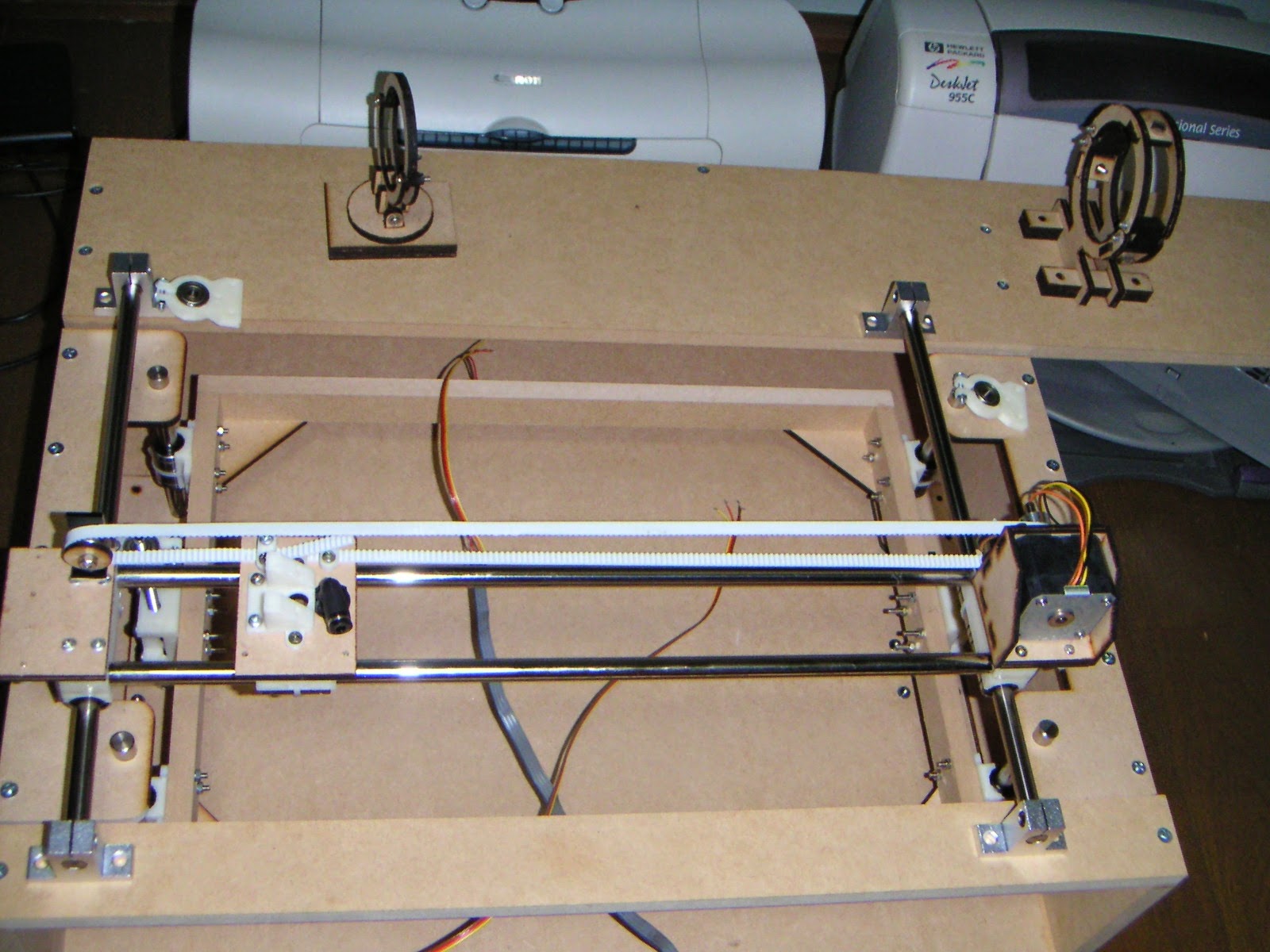
さて、次はどうしましょうか。ミラーの角度調整機構を試すか、制御ボックスをデザインするか。
しばし考えて、ボックスを先に作ることにしました。今は電源や基板がすべてむき出してサーカス配線のままですので、もう少しきれいにまとめたいと思っているのです。ついでに冷却水の温度管理や非常停止などの作り込みもしたいと思っています。