
軸駆動のテストを行います。
まずハーネスを作ります。ジャンク配線箱から適当なハーネスを持ってきて、

一方をピンヘッダに、他方をネスコネクタにハンダ付けします。これを二本作製。

モータドライバは壱号機のものを流用。
X,Y軸にそれぞれ接続します。
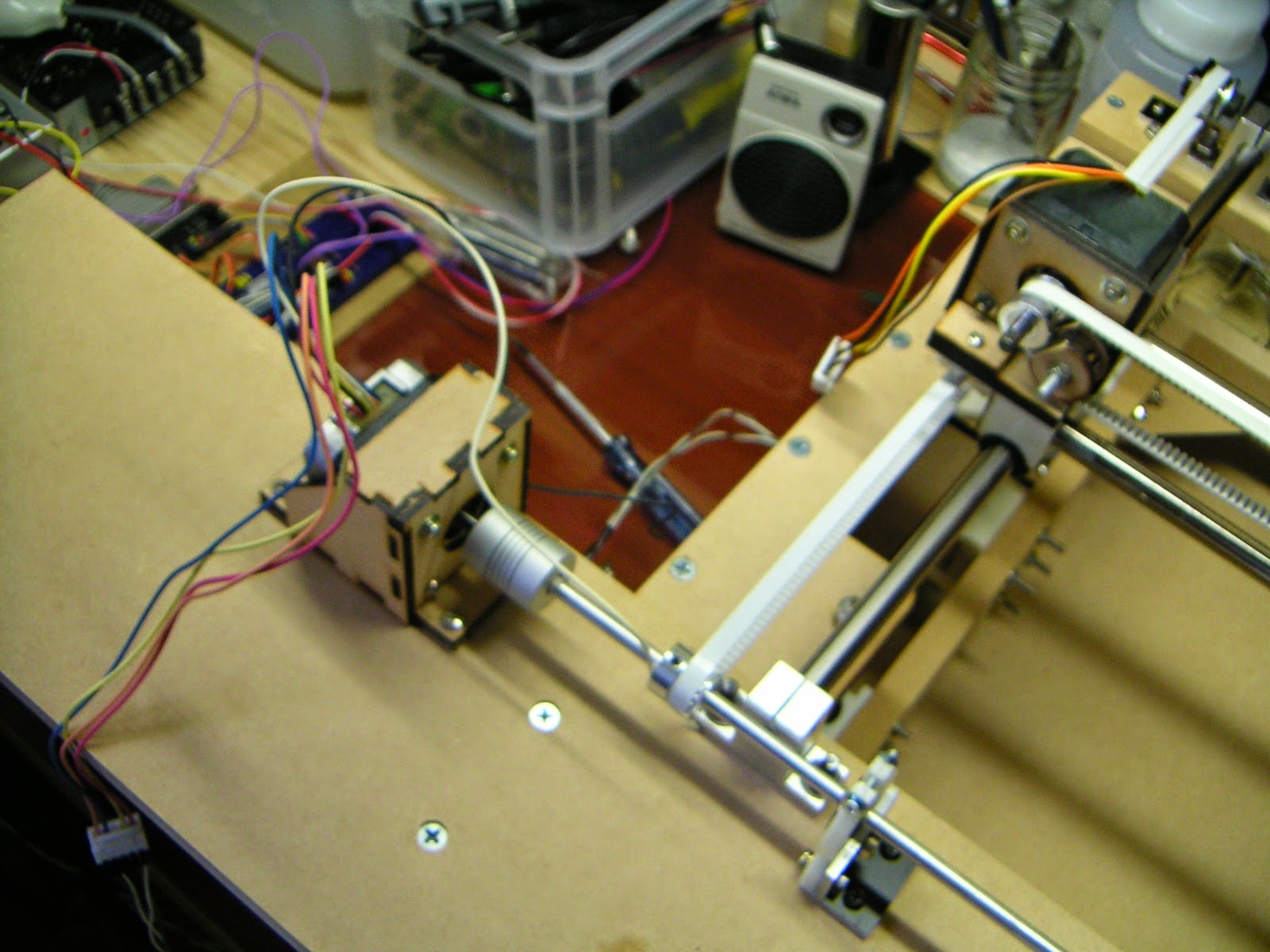
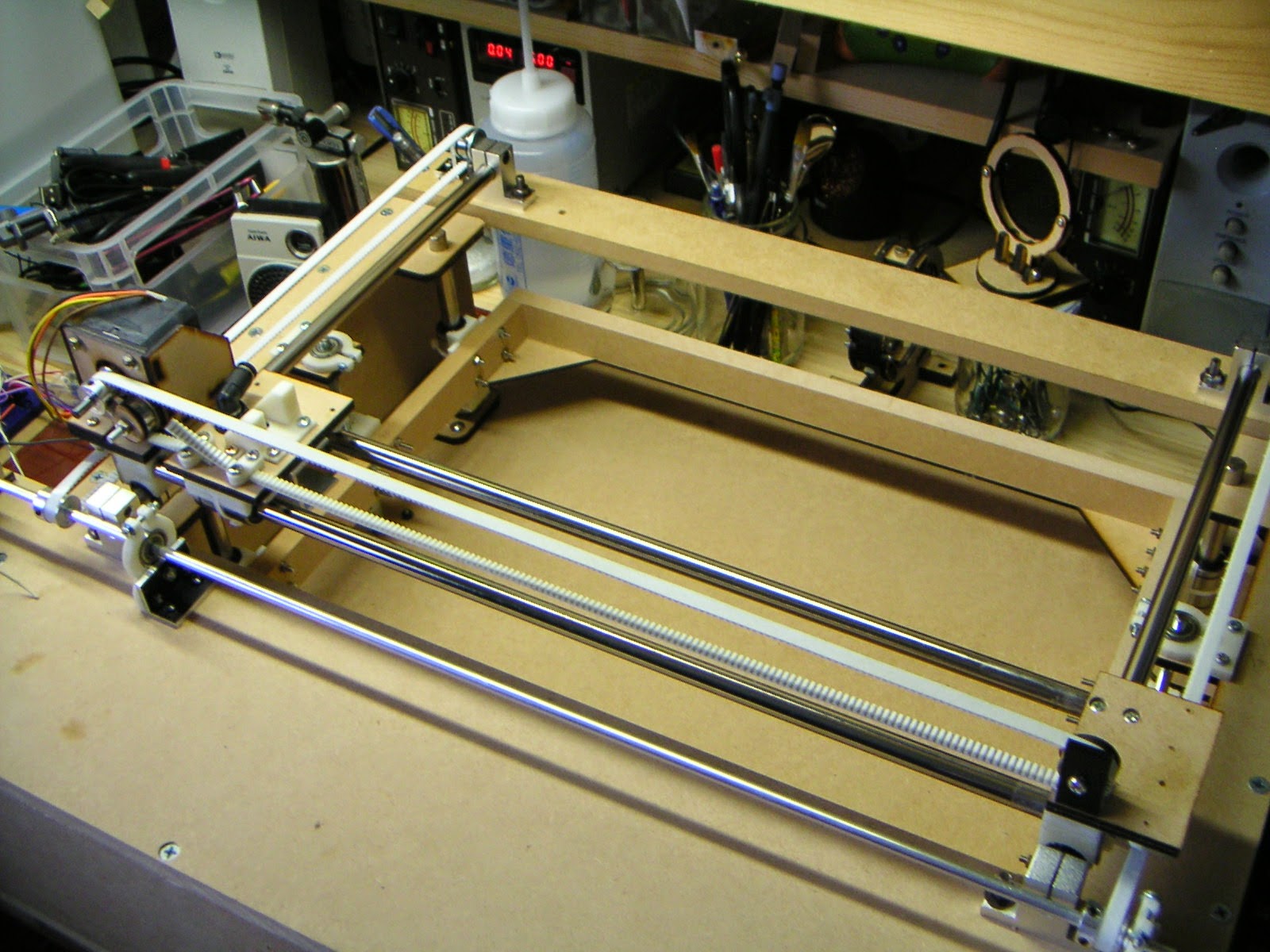
では動かしてみましょう。まずはマニュアルで。
悪くないですね。非常に静かです。振動も全くないわけではありませんが、一号機に比較すると大幅に改善されていると思われます。
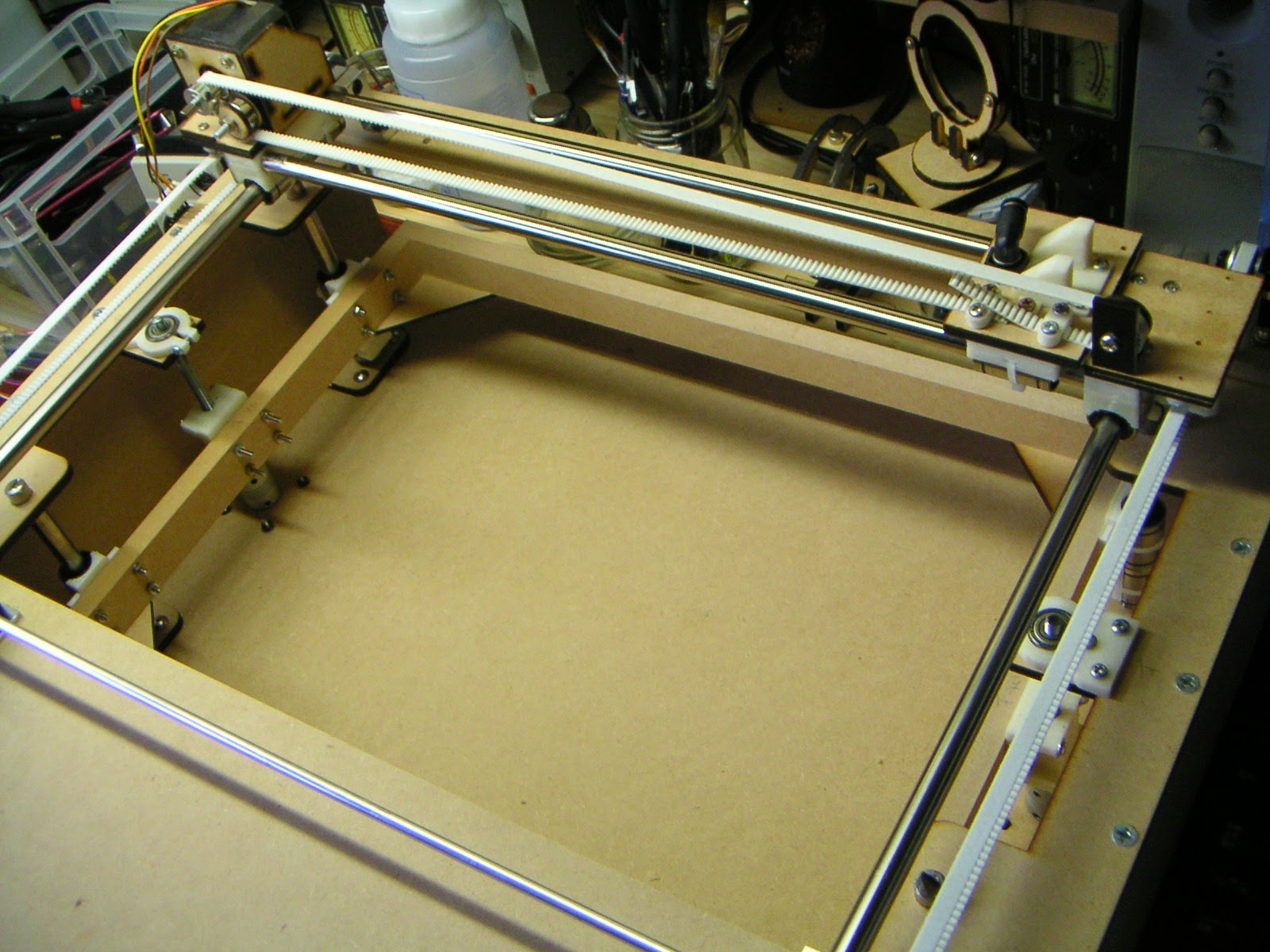
ここで、加工エリアを確認しておきます。参號機の設計目標は「A4サイズが加工できること」でした。
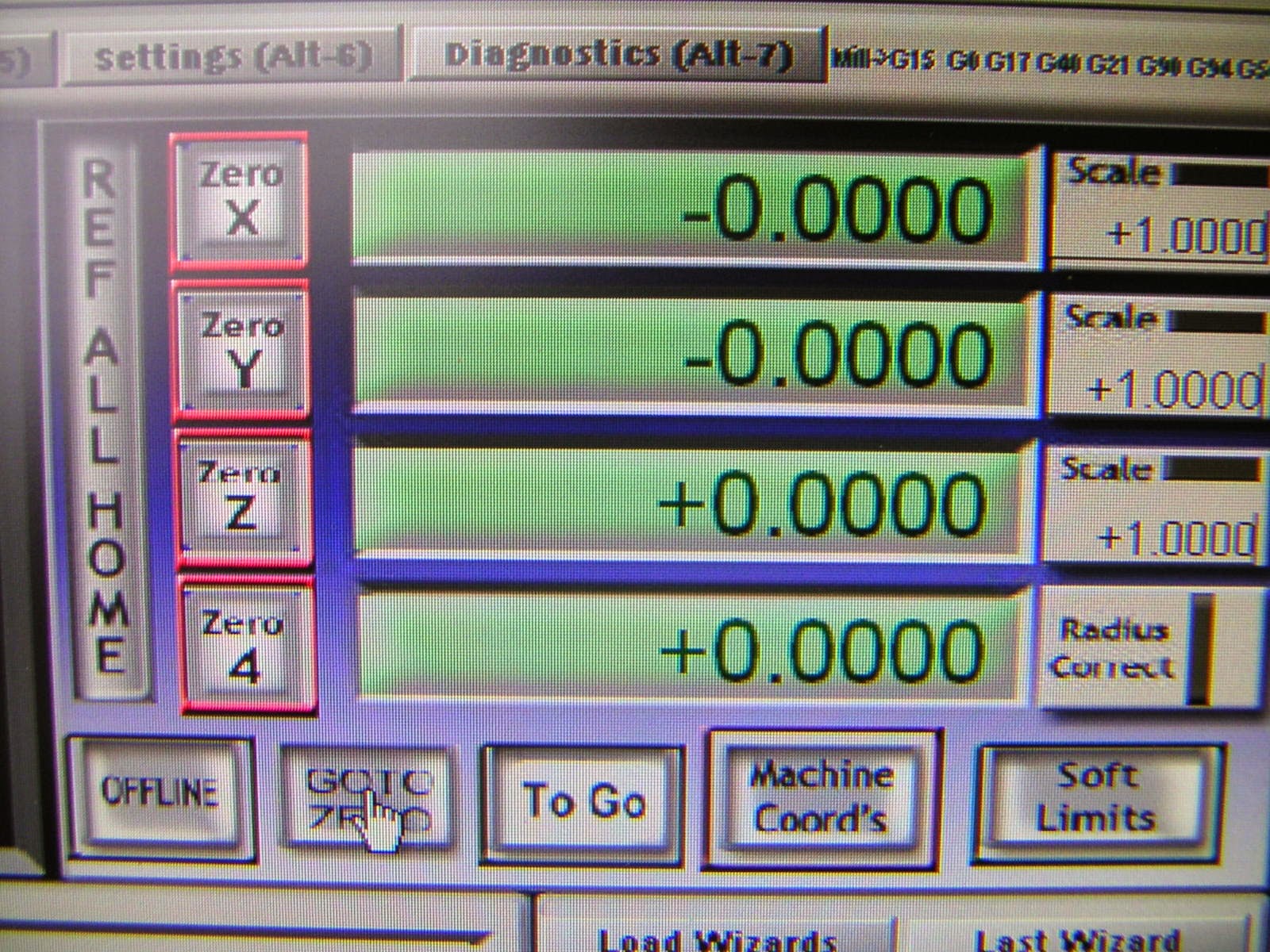
まず、原点となる予定の位置にヘッドを動かして、
MACH3の原点とします。
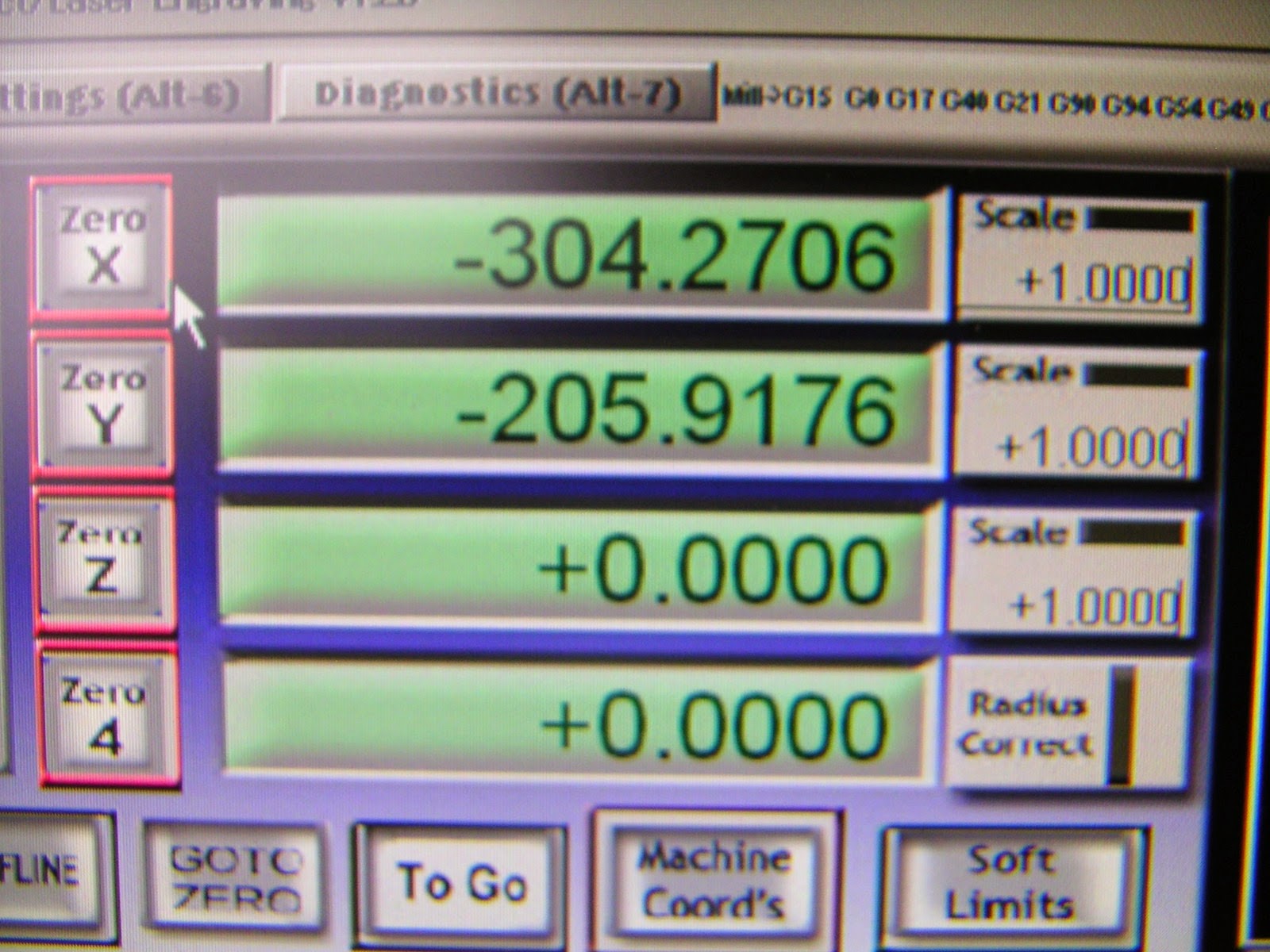
そこから対角位置の最遠点にヘッドを動かすと….
X軸が300mm、Y軸が200mmといったストロークです。
A4サイズが210mm×297mmですから、ほぼ達成と言ってよいでしょう。
ではこの位置からMACH3のGOTO ZERO ボタンを押して原点復帰させてみます。
すばらしい。この速度で動いてくれれば何の文句もありません。
調子に乗って切り絵を作ったときのデータで軸を空運転してみます。速度はやや上げ気味でいじめてみます。
ちゃんと動いているようですね。
もうひとつ。
ほんとのところはペンでも持たせて実際に描画させてみないとわかりませんが、この速度でも脱調はしていないように見えます。
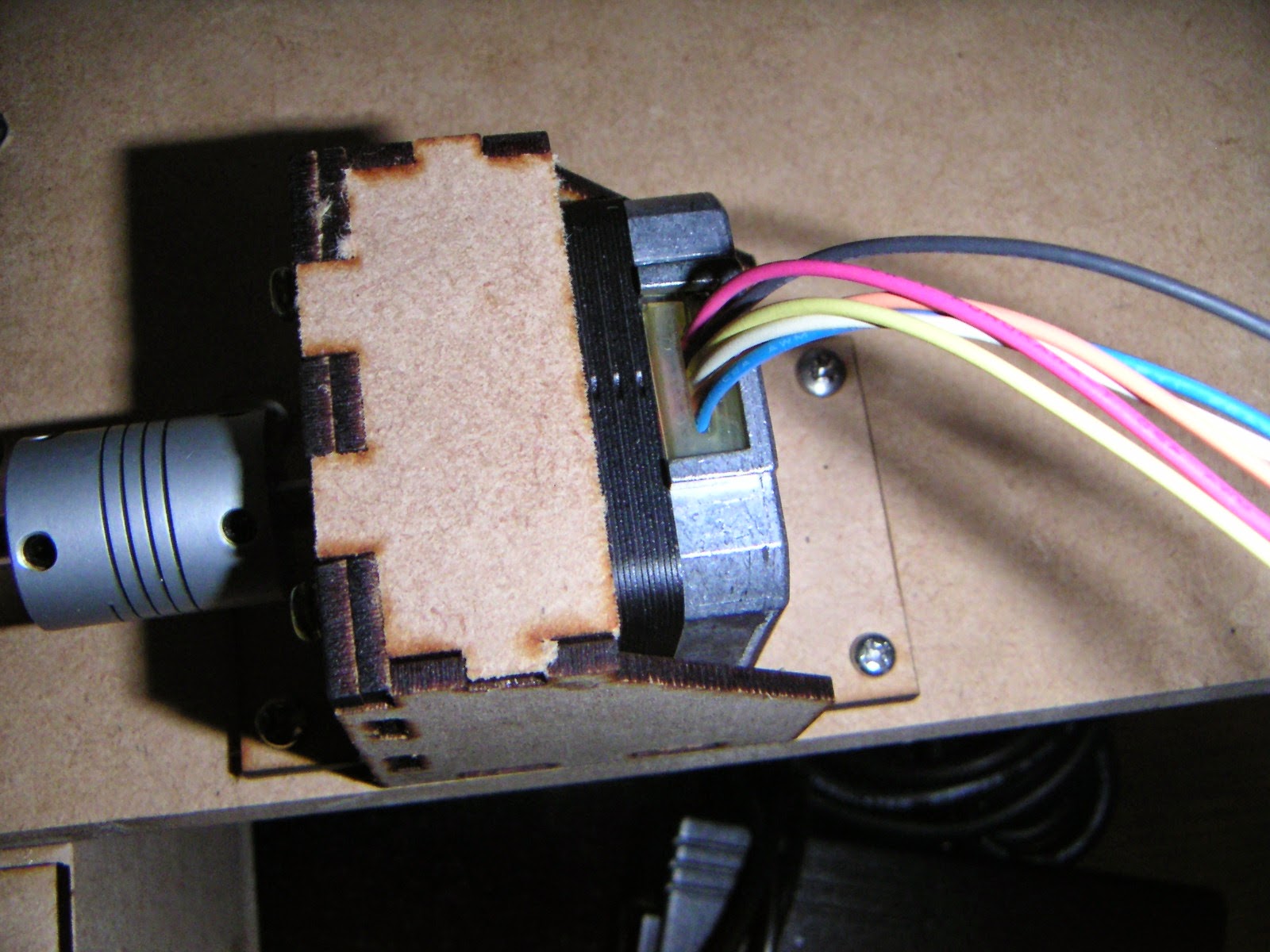
ということで、このモータで行くことにします。モータAssyをネジで本止めしてシャコ万を外せば完成。
以上で主要なメカ部分は完成したことになります。精度その他は全部が出来てからですが、ここまでの感触は悪くありません。少なくとも壱号機よりはましなものが出来ると思われます。
ここからは光学部分と制御部分の作製が中心になります。七合目くらいまで登ったかなという感じですね。
引き続きがんばりたいと思います。