久々に3Dプリンタネタであります。
今回制御系の配線引き回しをまとめ、電源や液晶表示モジュールをちゃんと固定しました。バラバラでも問題なく動いていたのでついサボっておりました。
これでようやく完成といっていいかと思います。
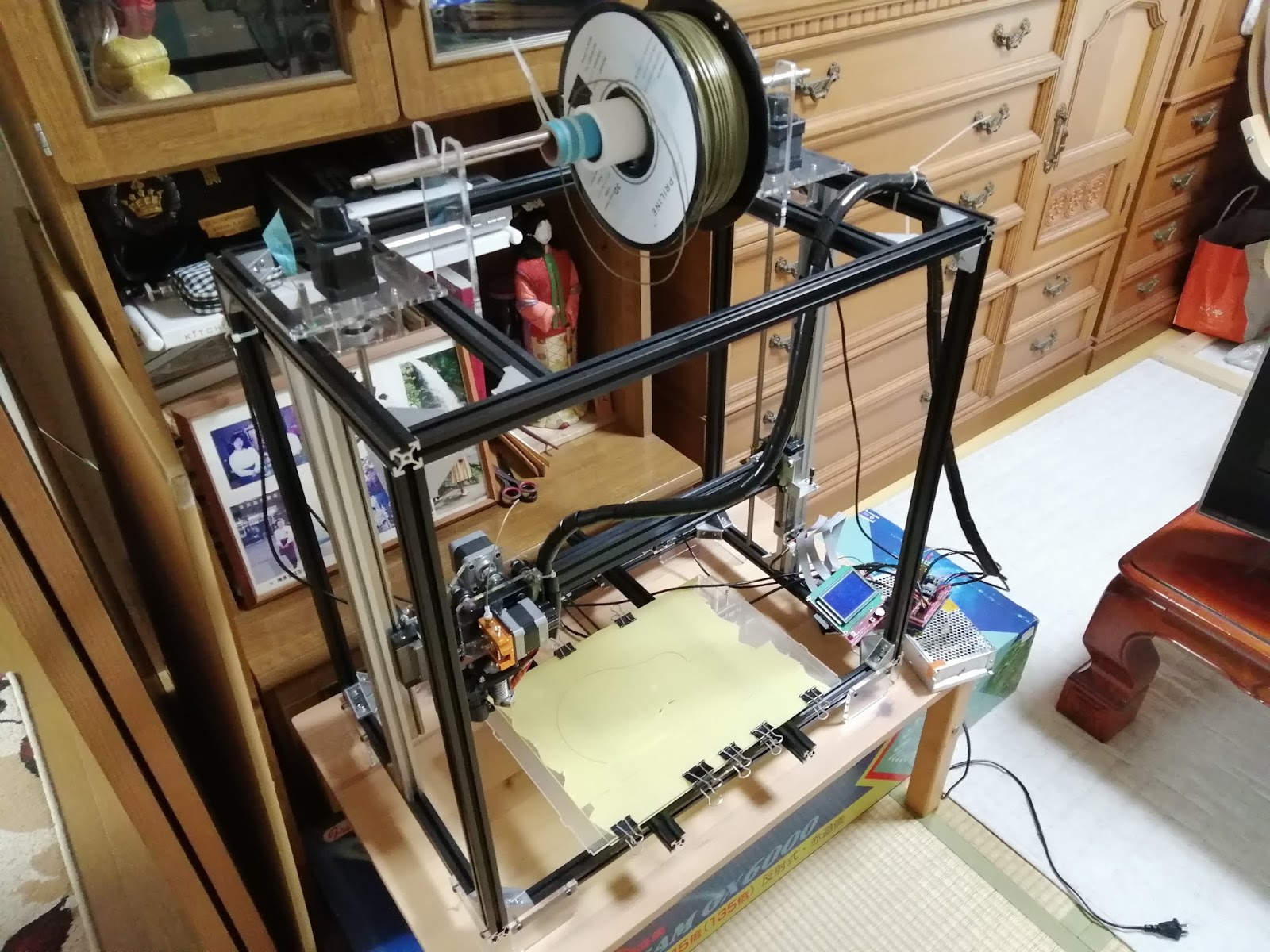
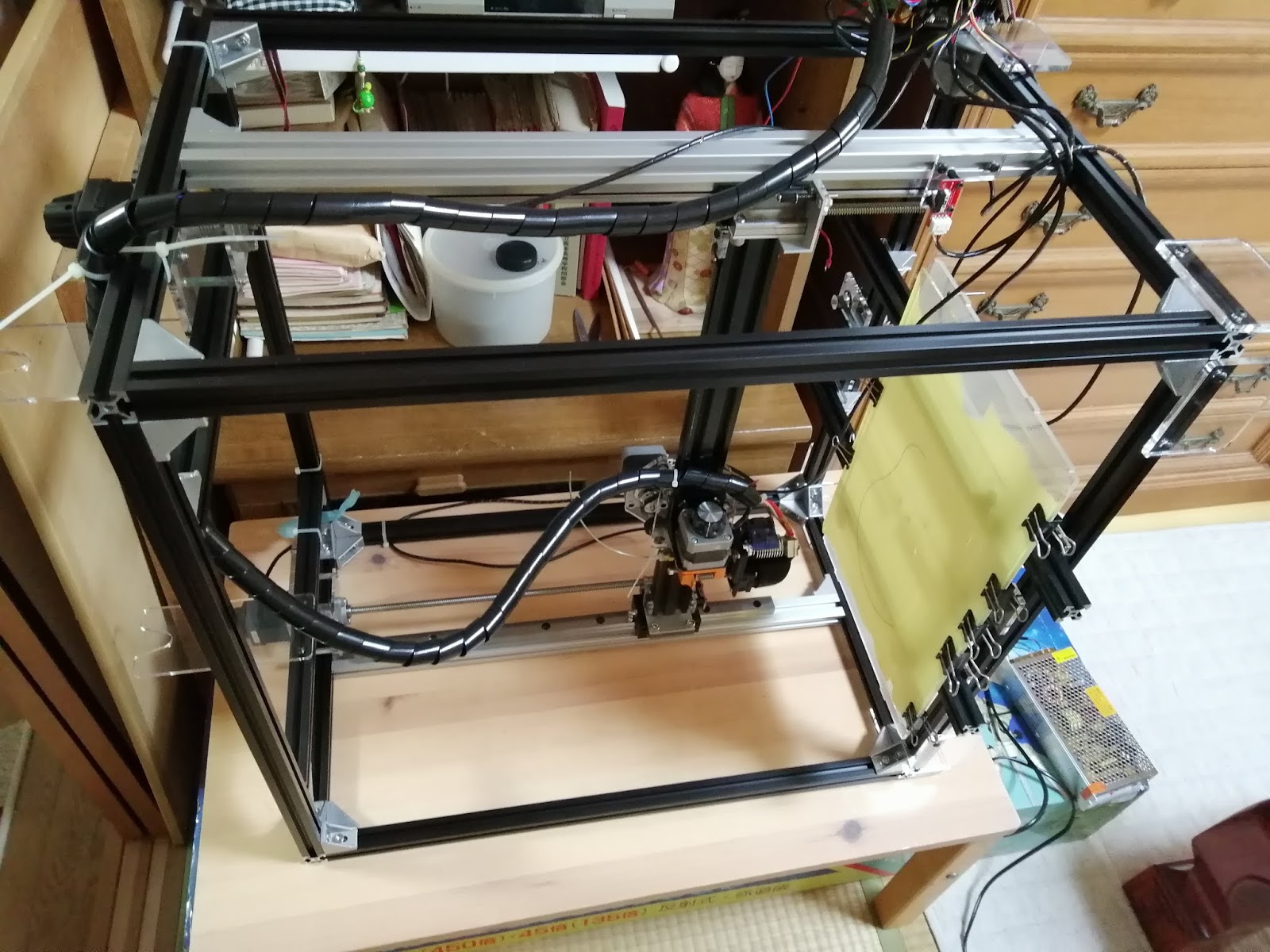
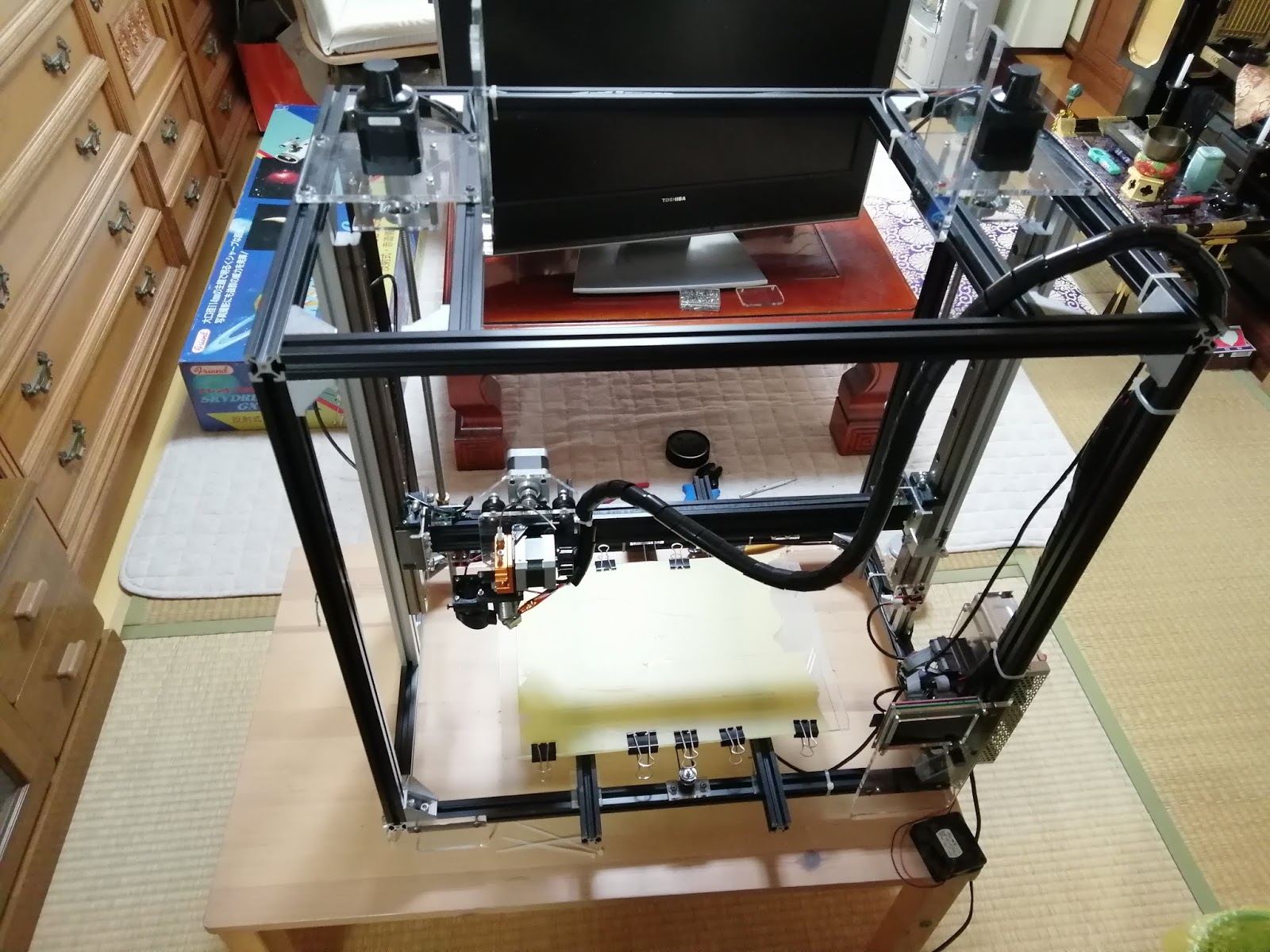
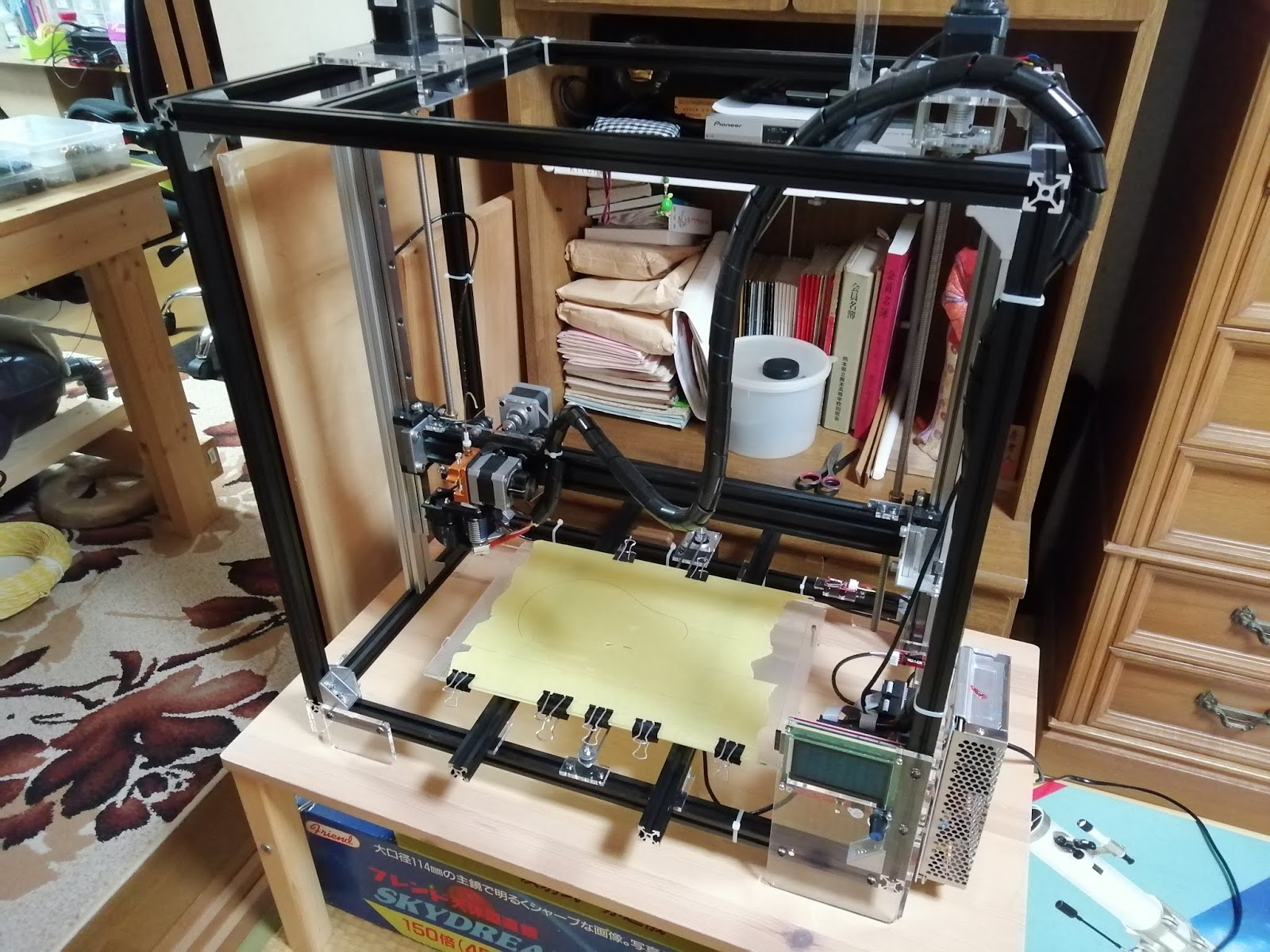
では行きます。まず現状。
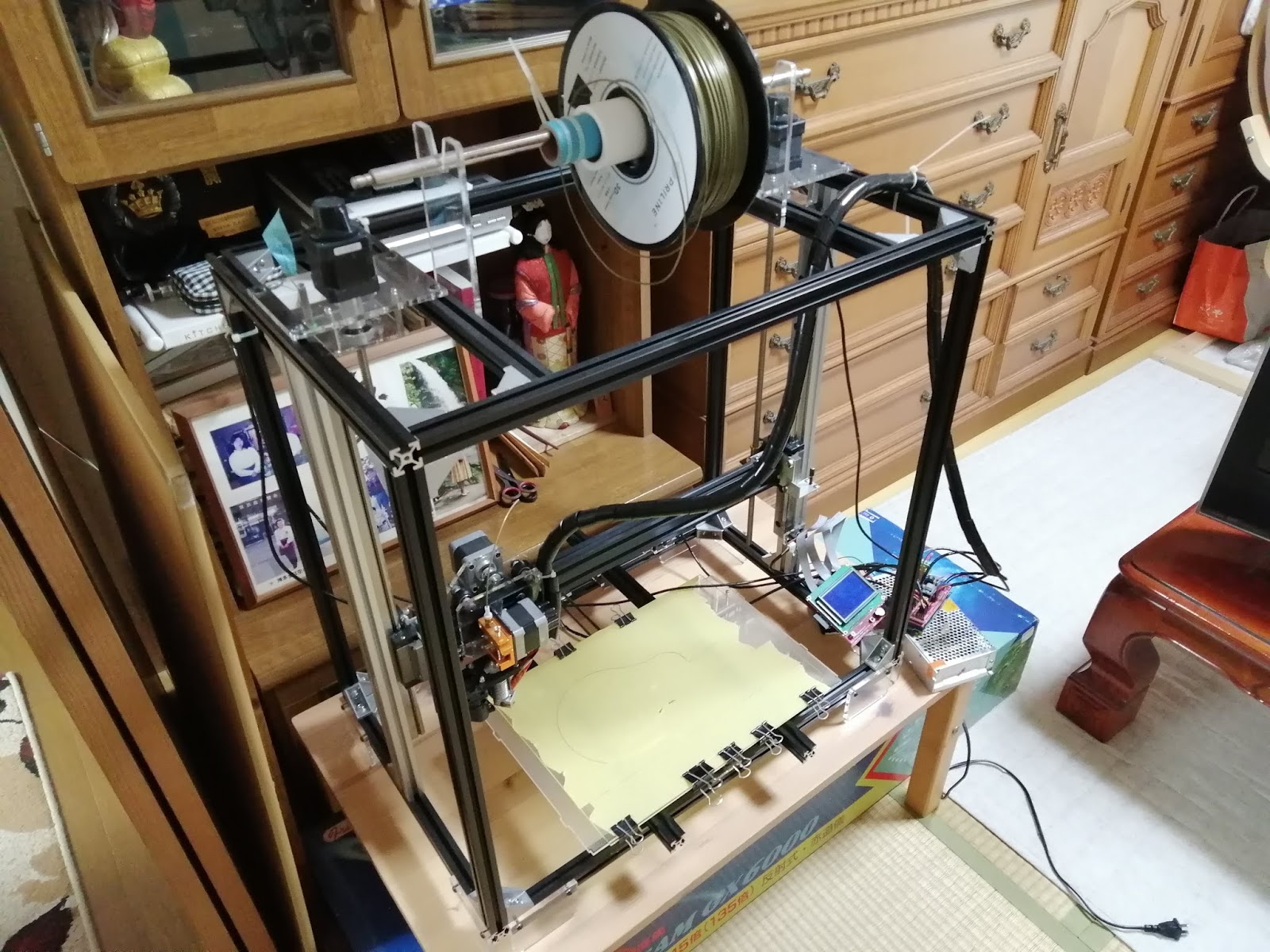
置いただけ、繋いだだけ(笑
レイアウト考えていきます。
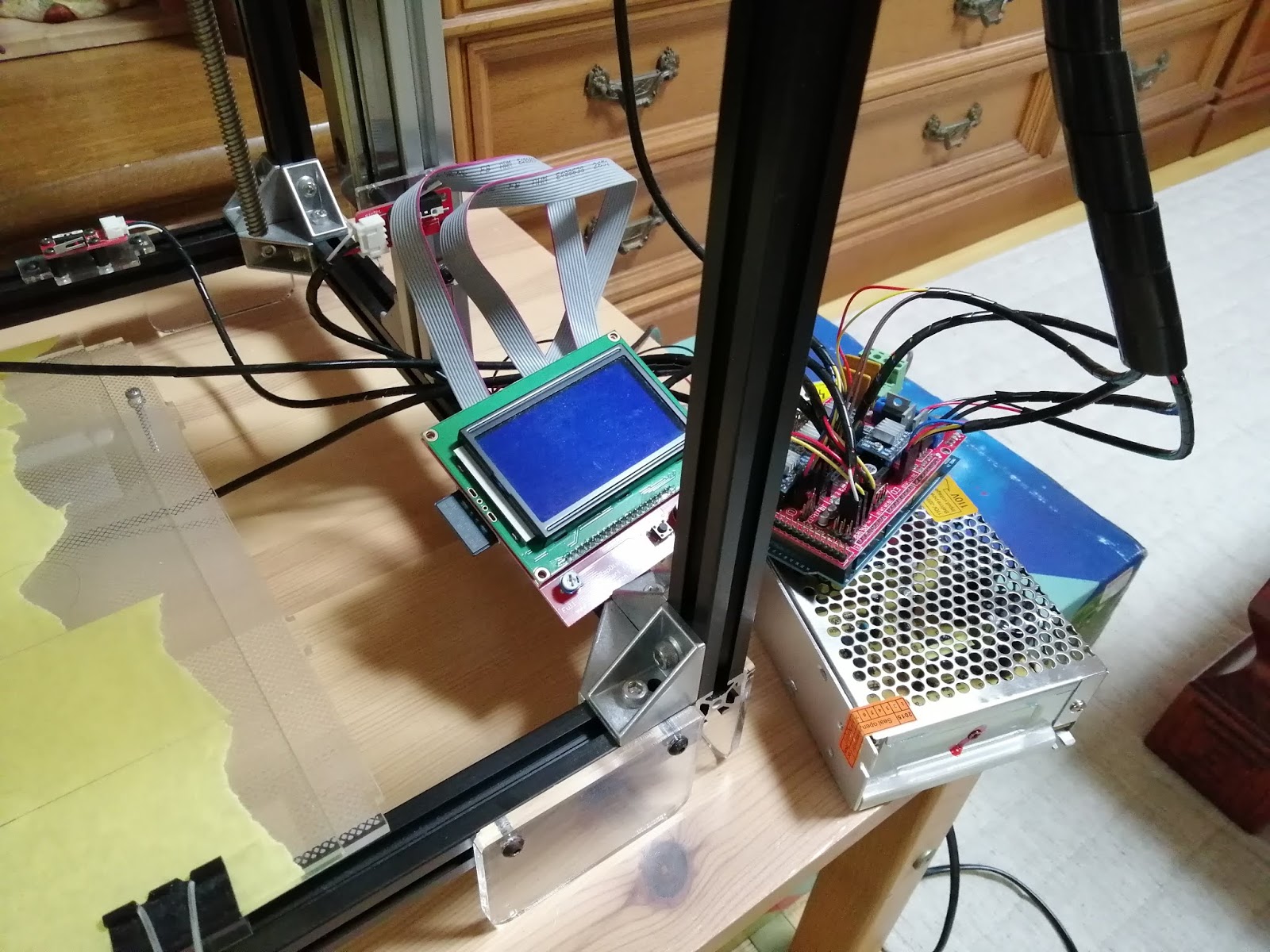
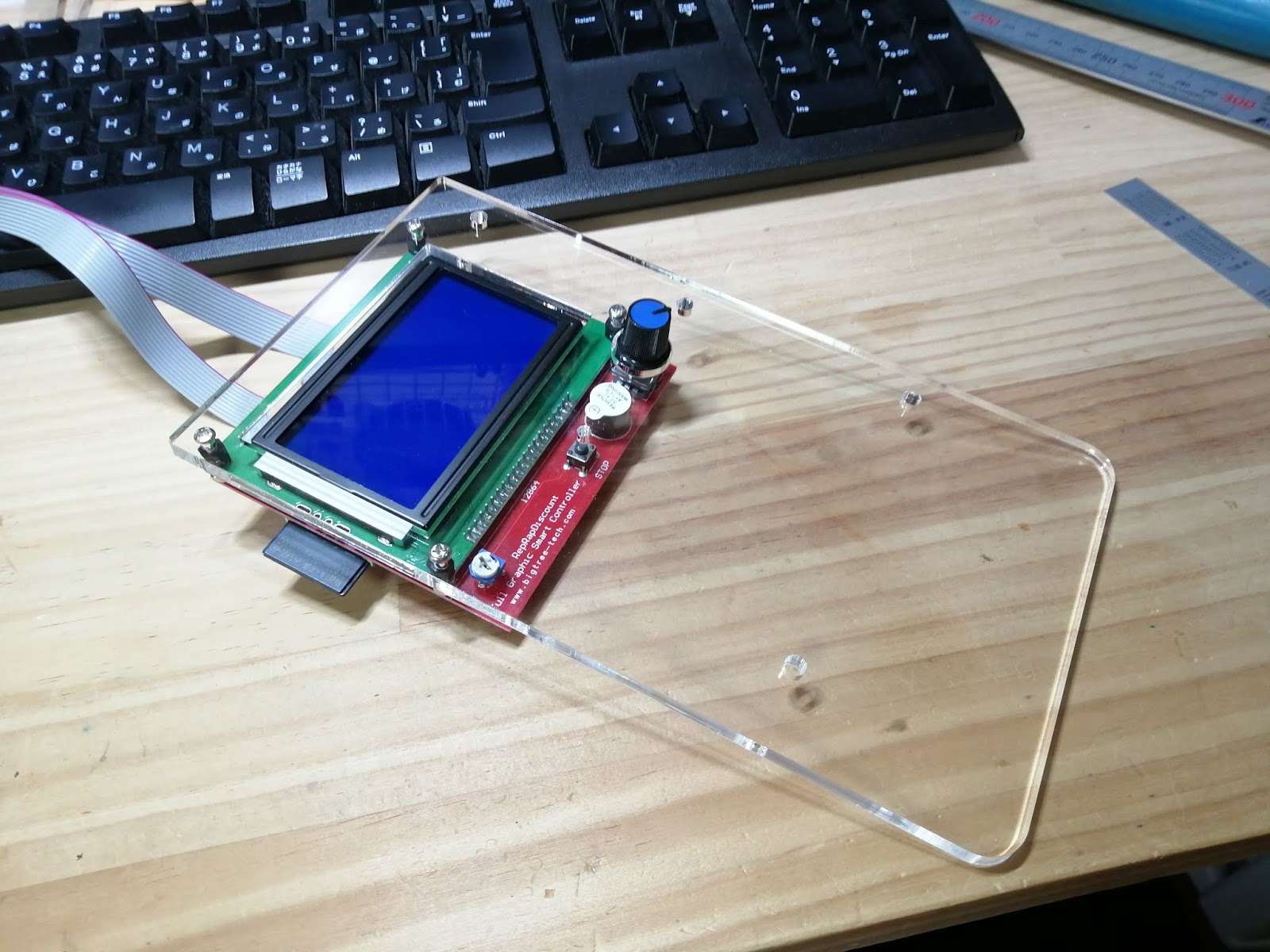
まずもって表示/操作部はやっぱここでしょうね。

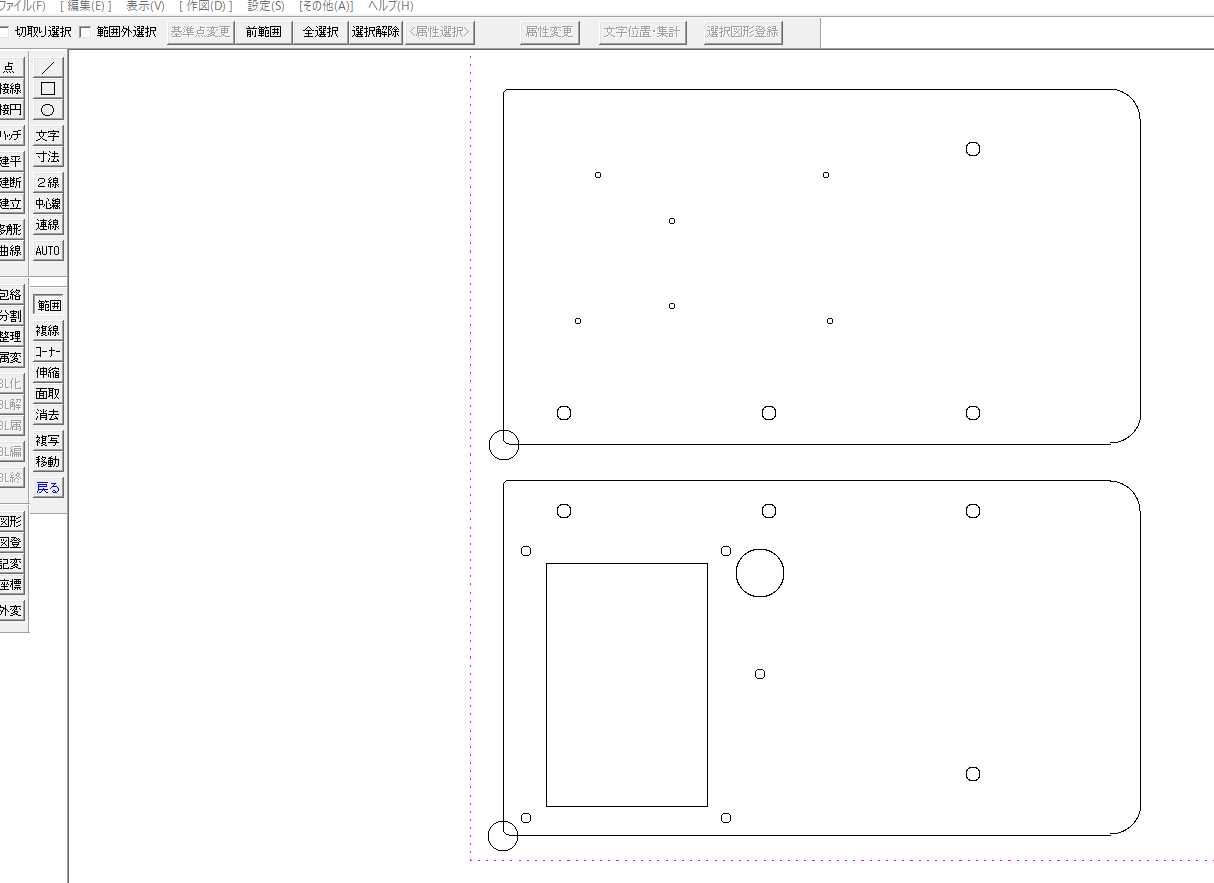
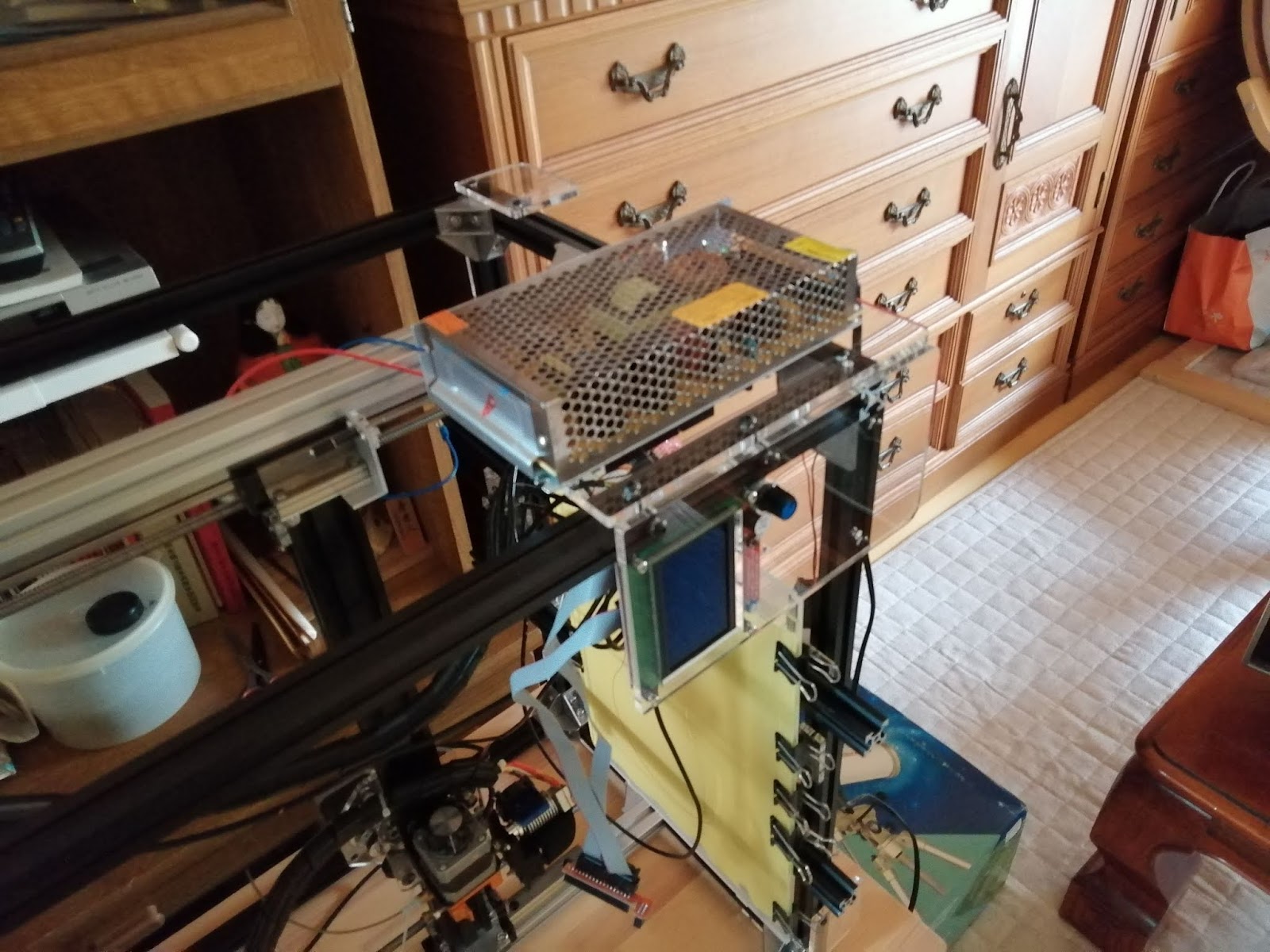
足兼操作部固定パネルと、その裏に電源と制御部を乗せたパネルを配置することにします。いずれも5mmtのアクリル板で頑丈に作ることにします。
ざっと設計しますが、平板に穴開けるだけなので3Dである必要もありません。使い慣れた2D Cadであるjwcadを使います。
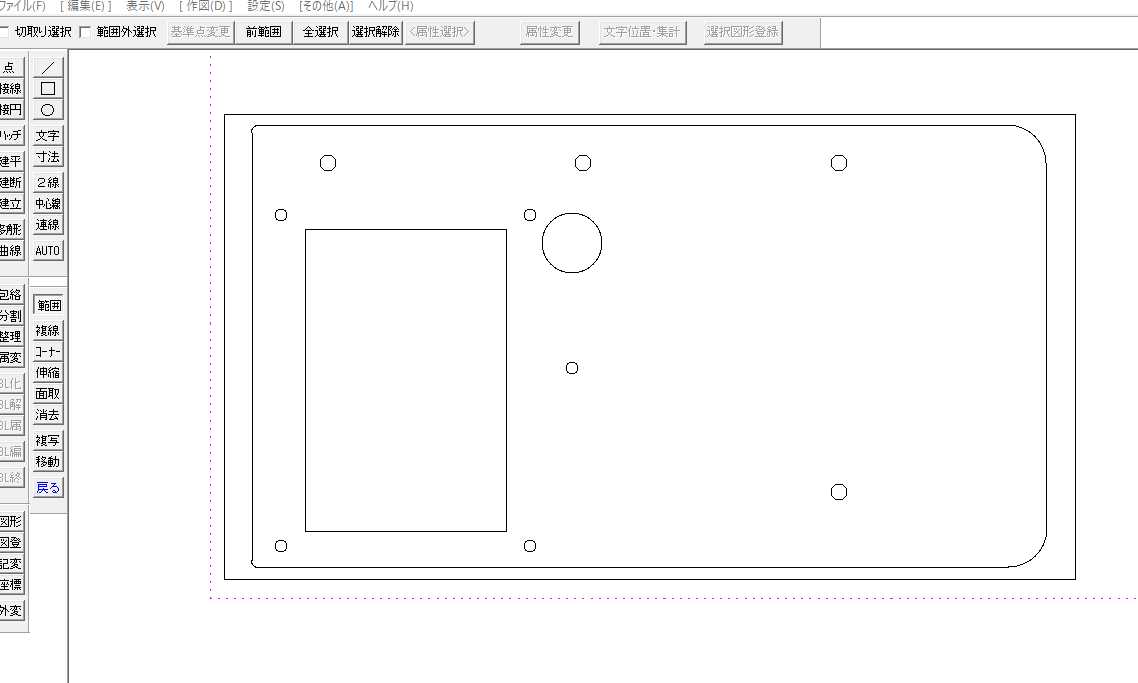
jwwファイルをNCVCに読み込んでGコードを作ります。
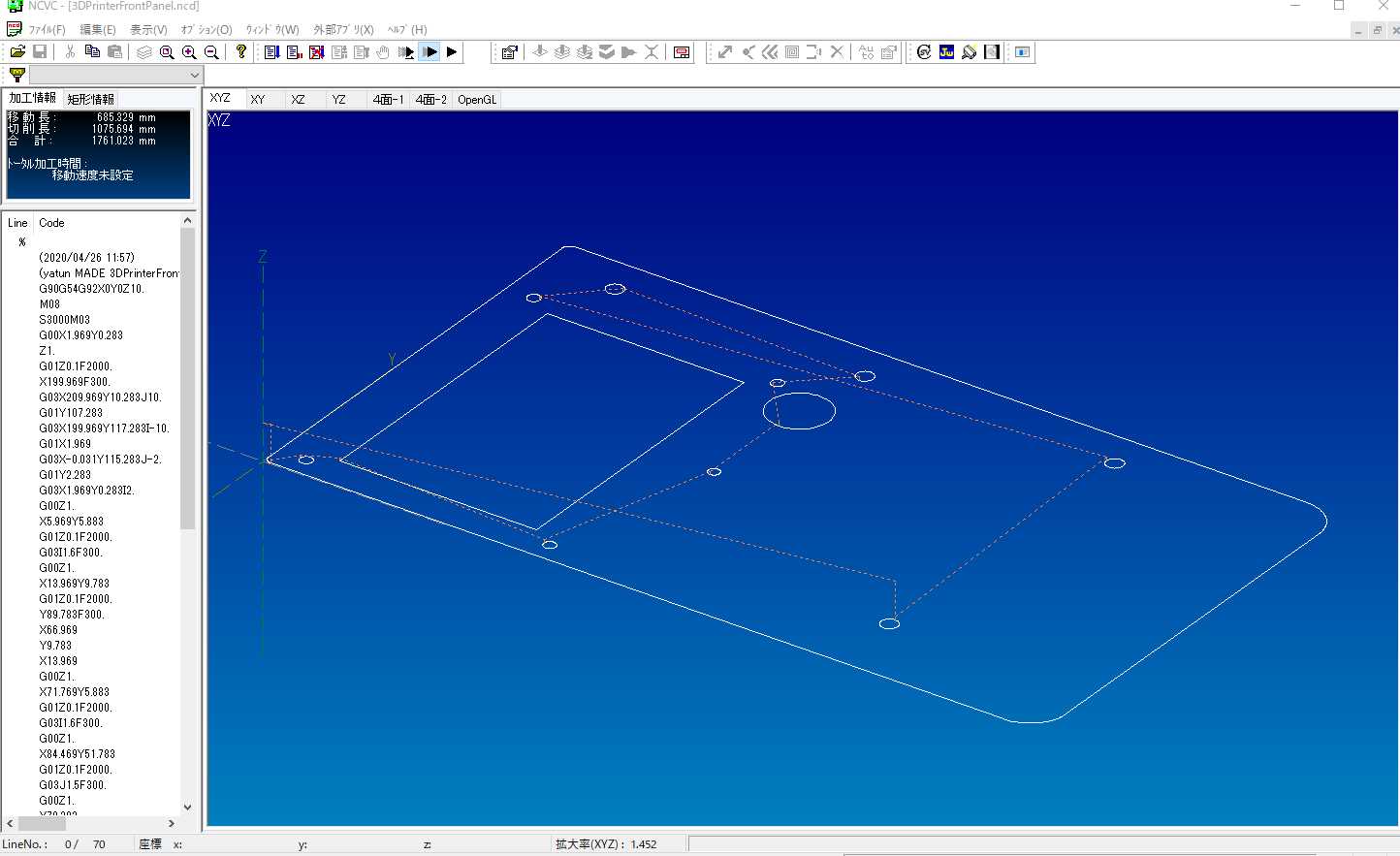
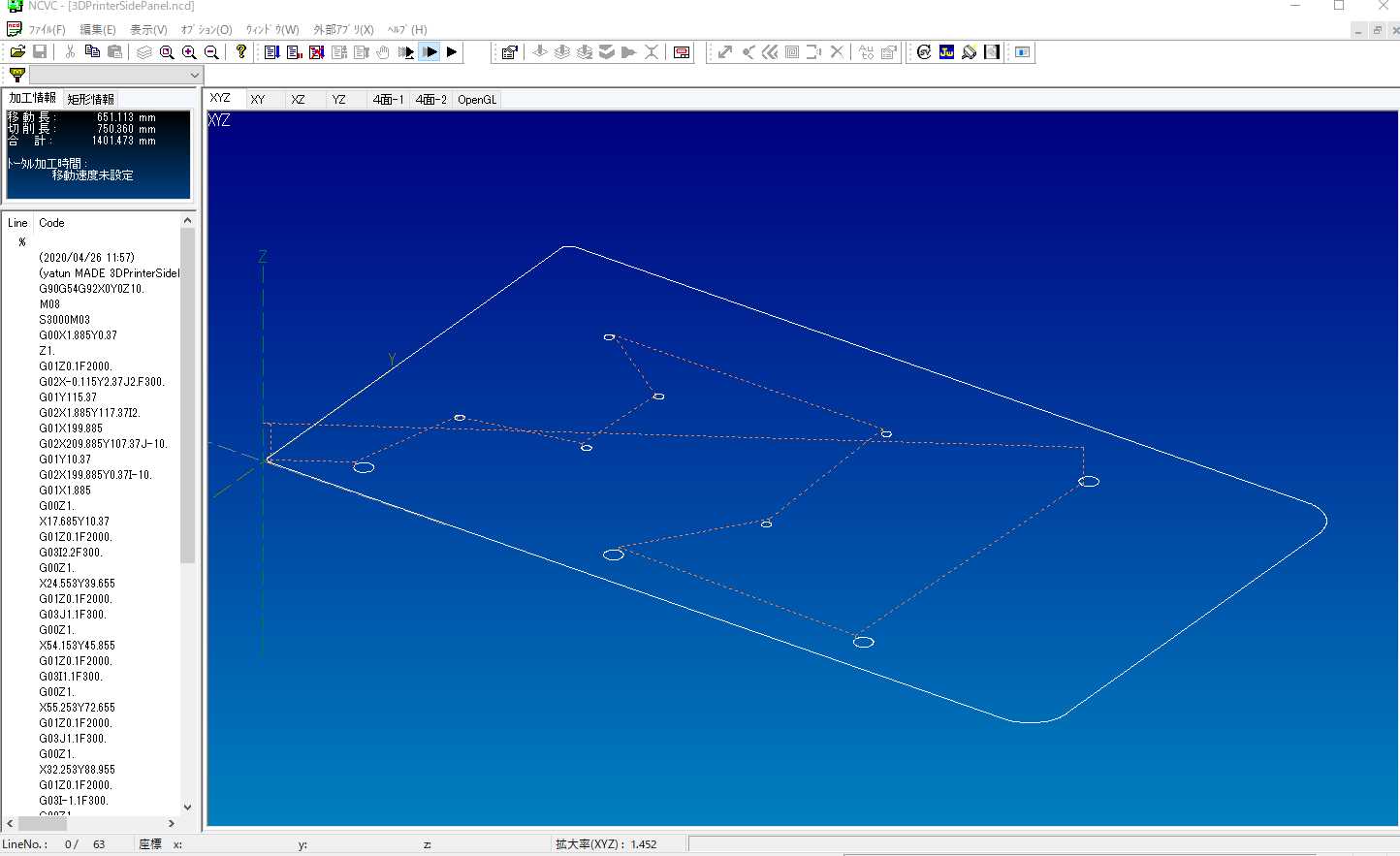
レーザ加工機で切断します。


5mmtアクリルなのでやや時間がかかりますが、それでも二枚のパネルを切っている時間はせいぜい3分といったところです。
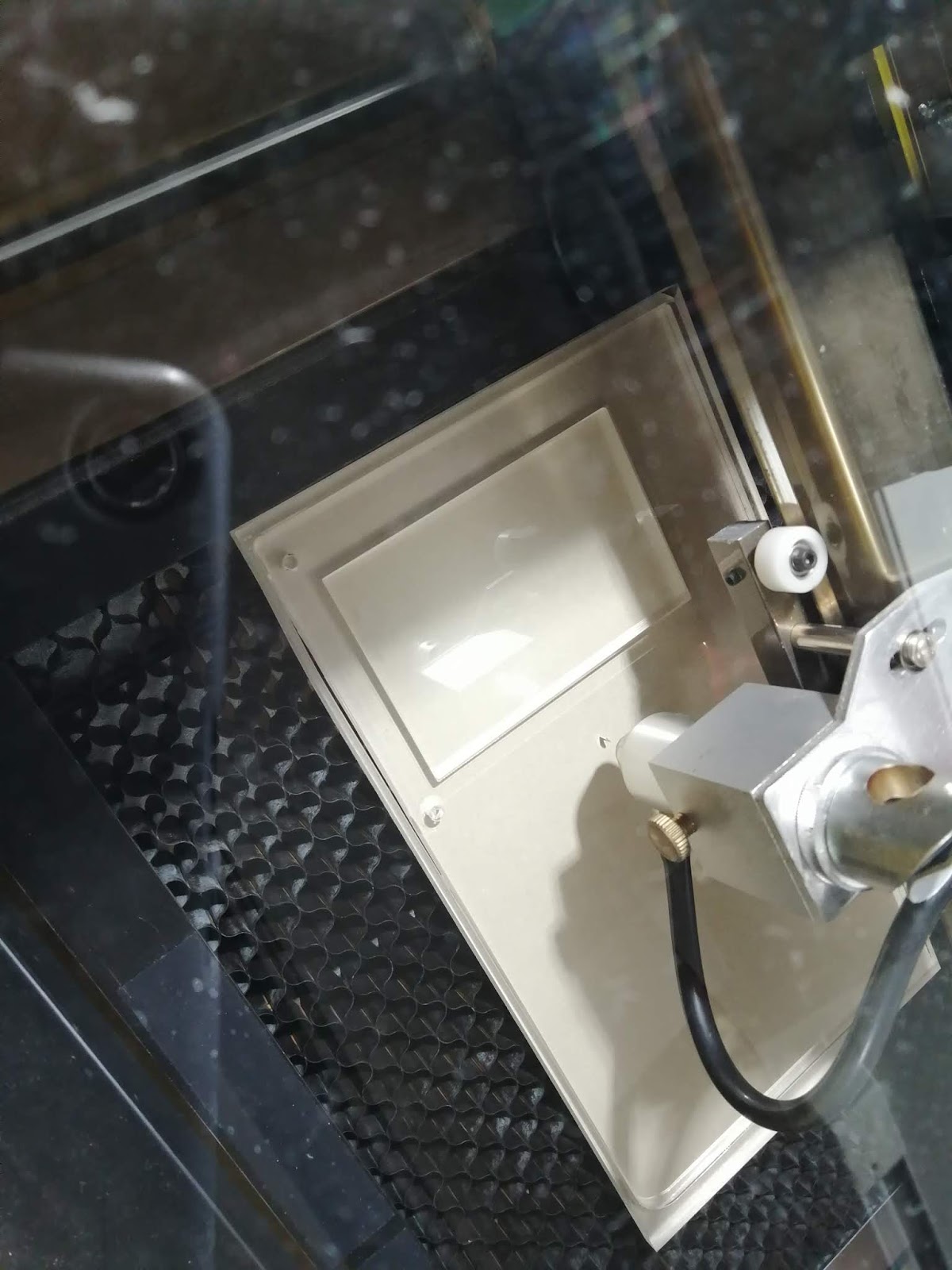

全く信じられない便利さです。こんなものが構想から入手まで1時間かかりません。


表示/操作部組付けていきます。
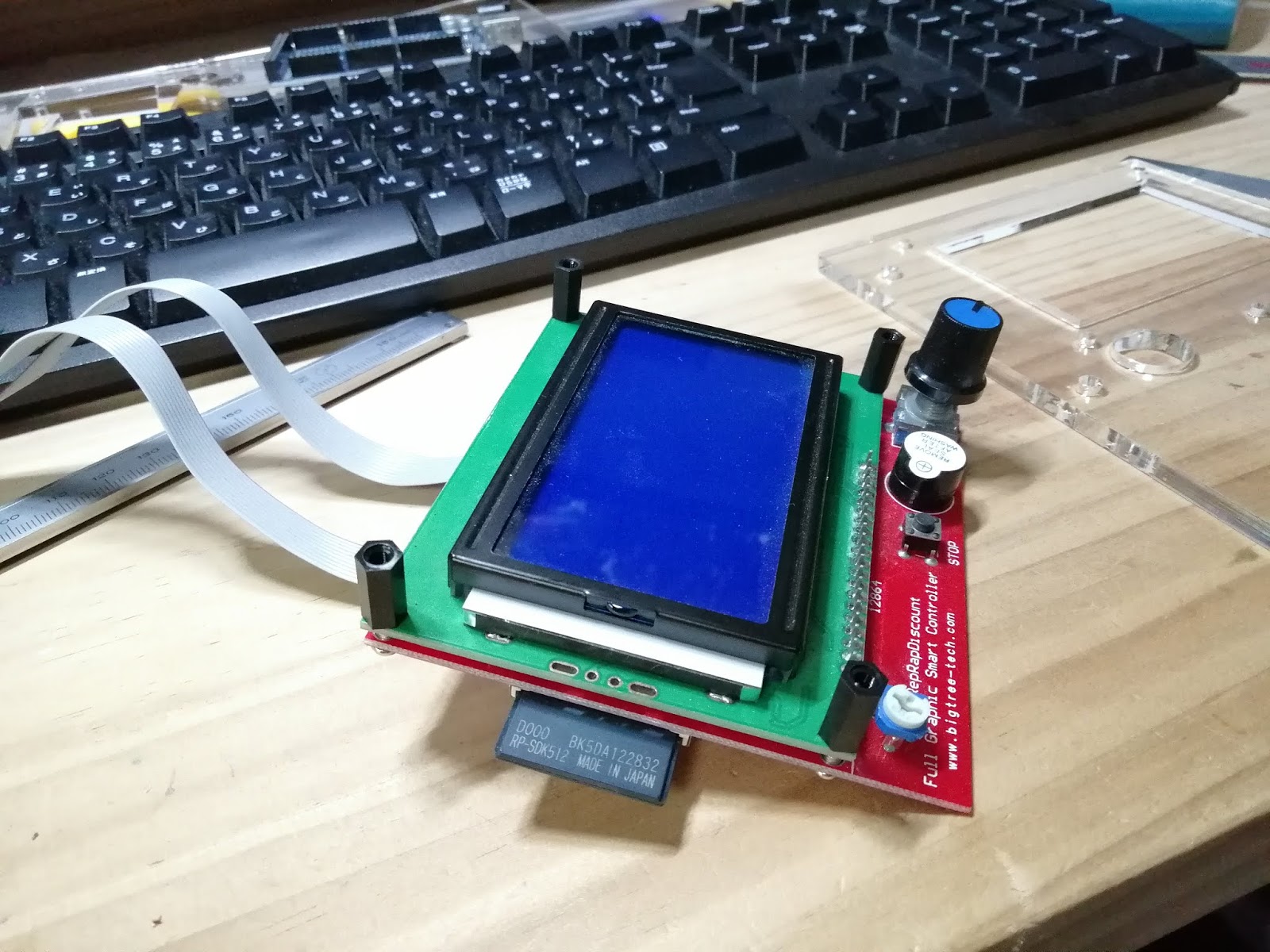
Aitendoのスペーサを愛用。

もちろんぴったりと美しく収まります。
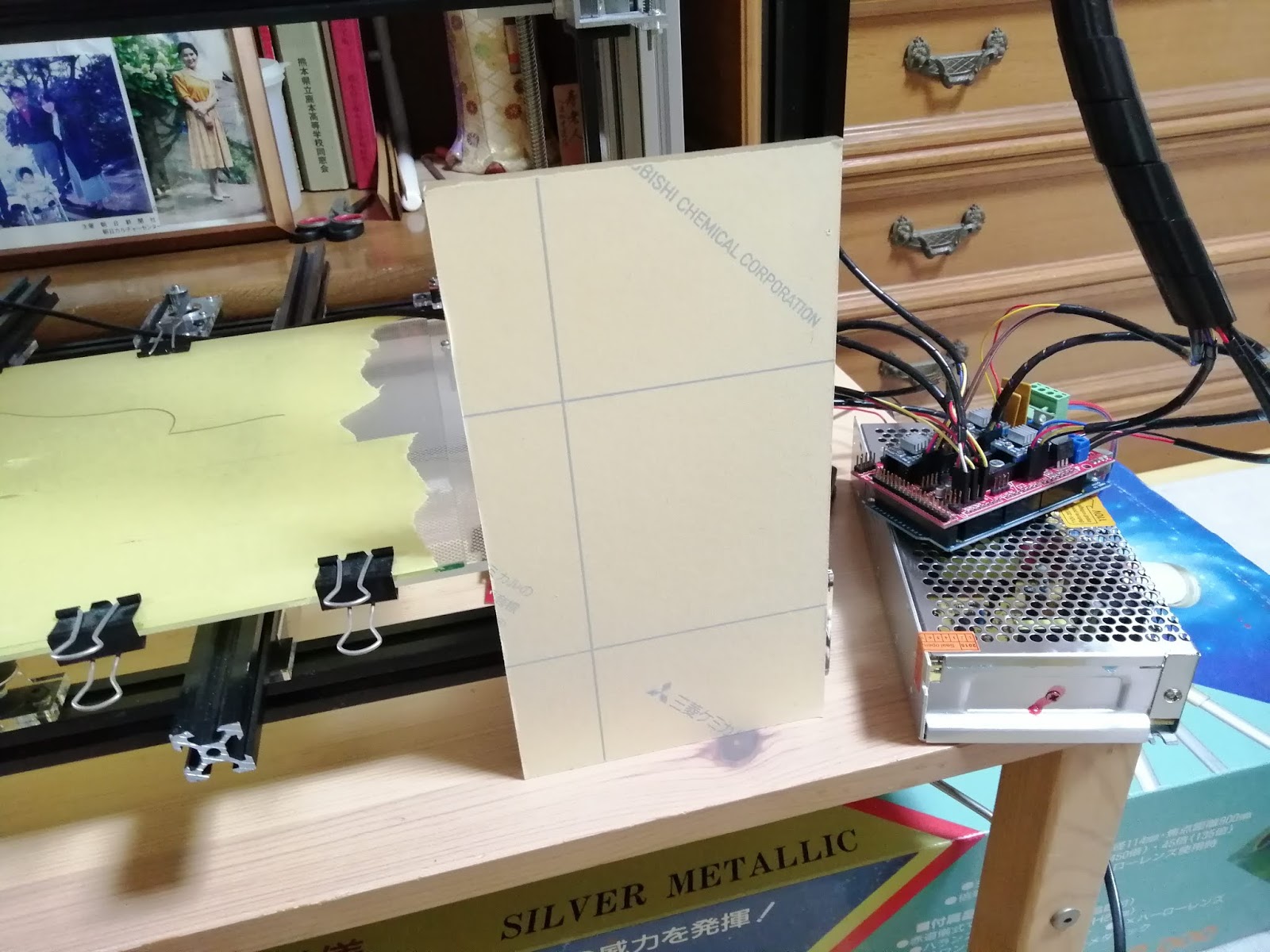
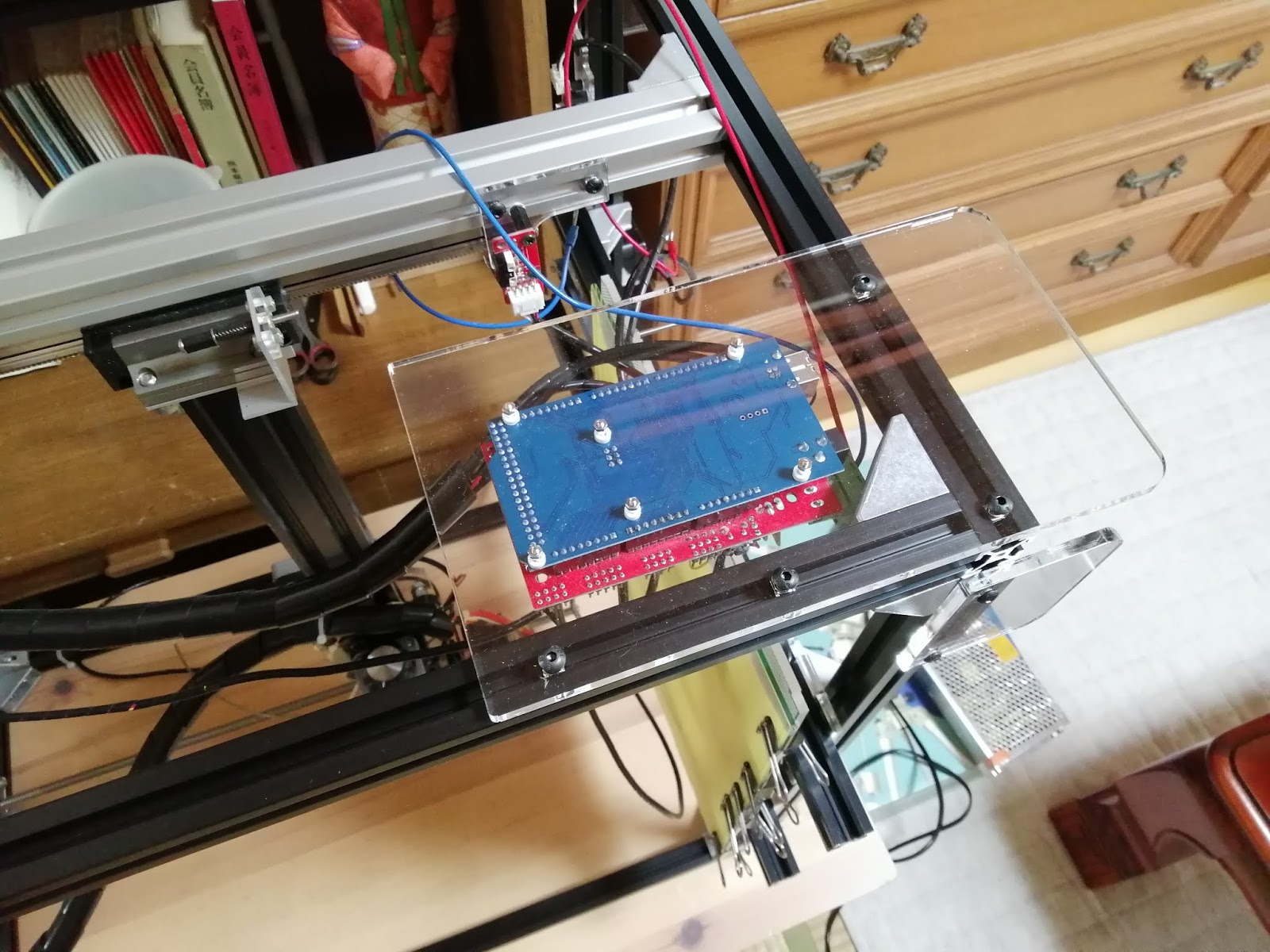
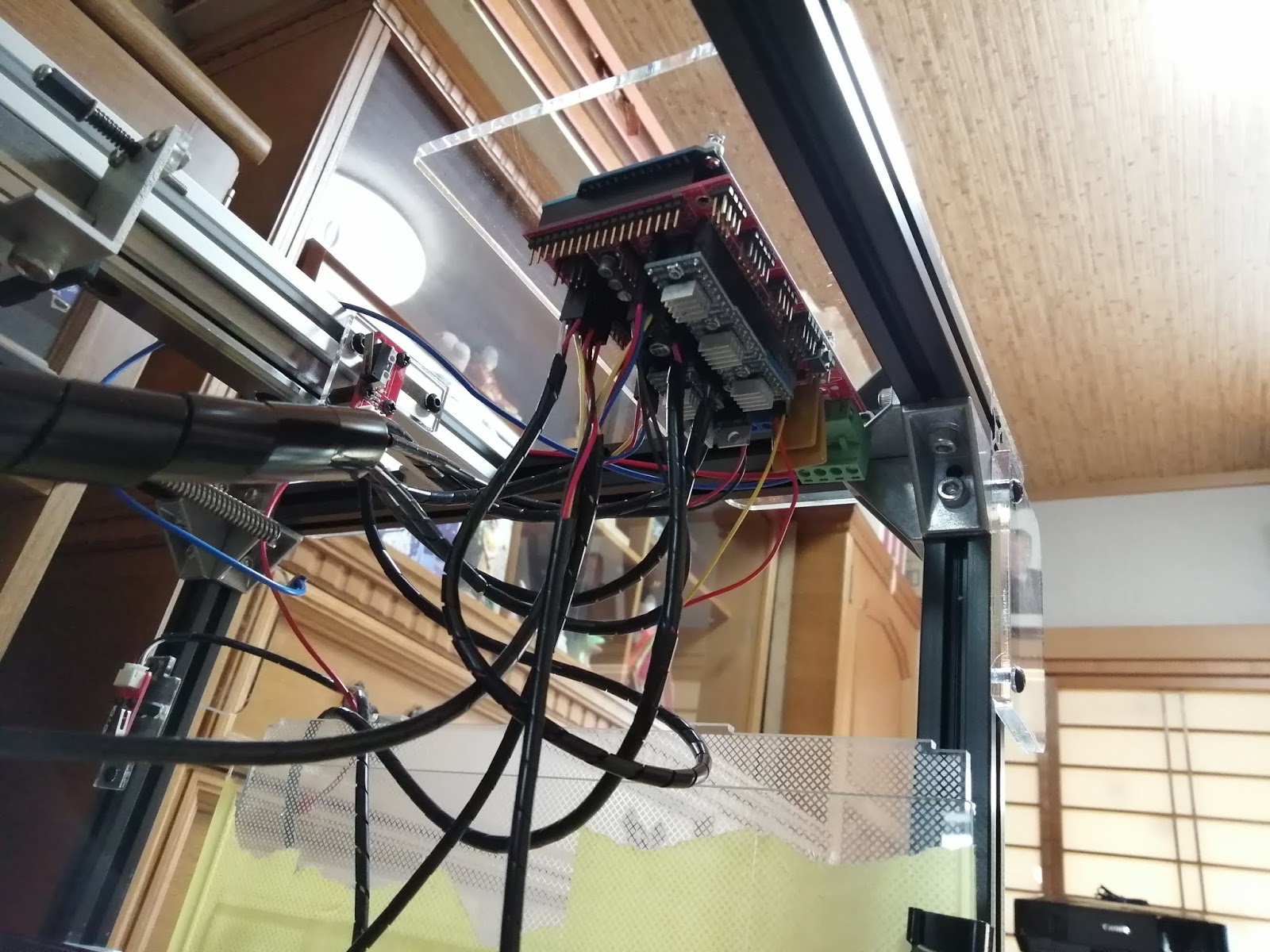
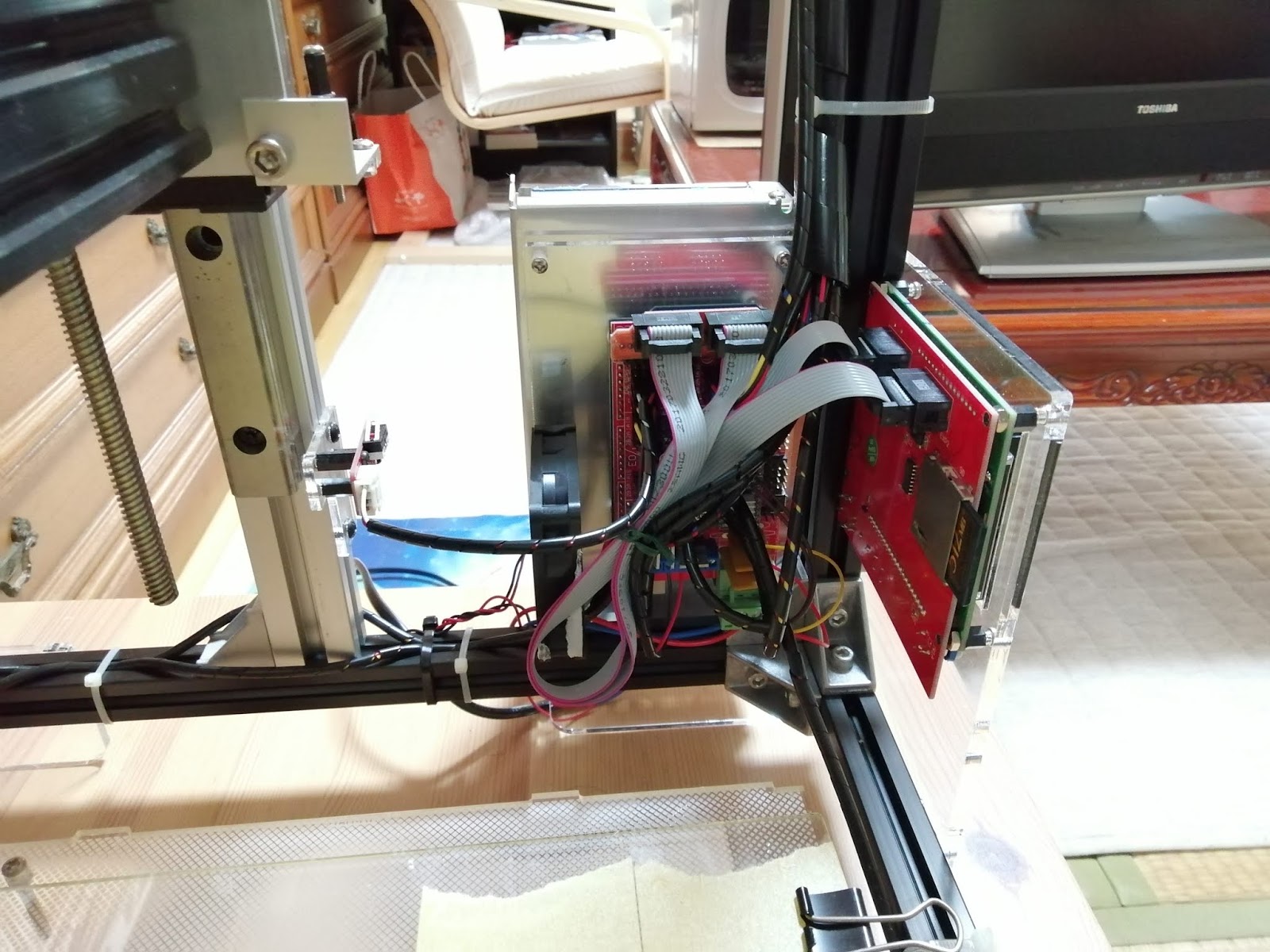
制御部分も組んでいきます。内側にArduino MEGA2560+GRBLコントローラを、外側に12Vの電源モジュールを固定します。Arduino ではMarlinモジュールが動作しています。

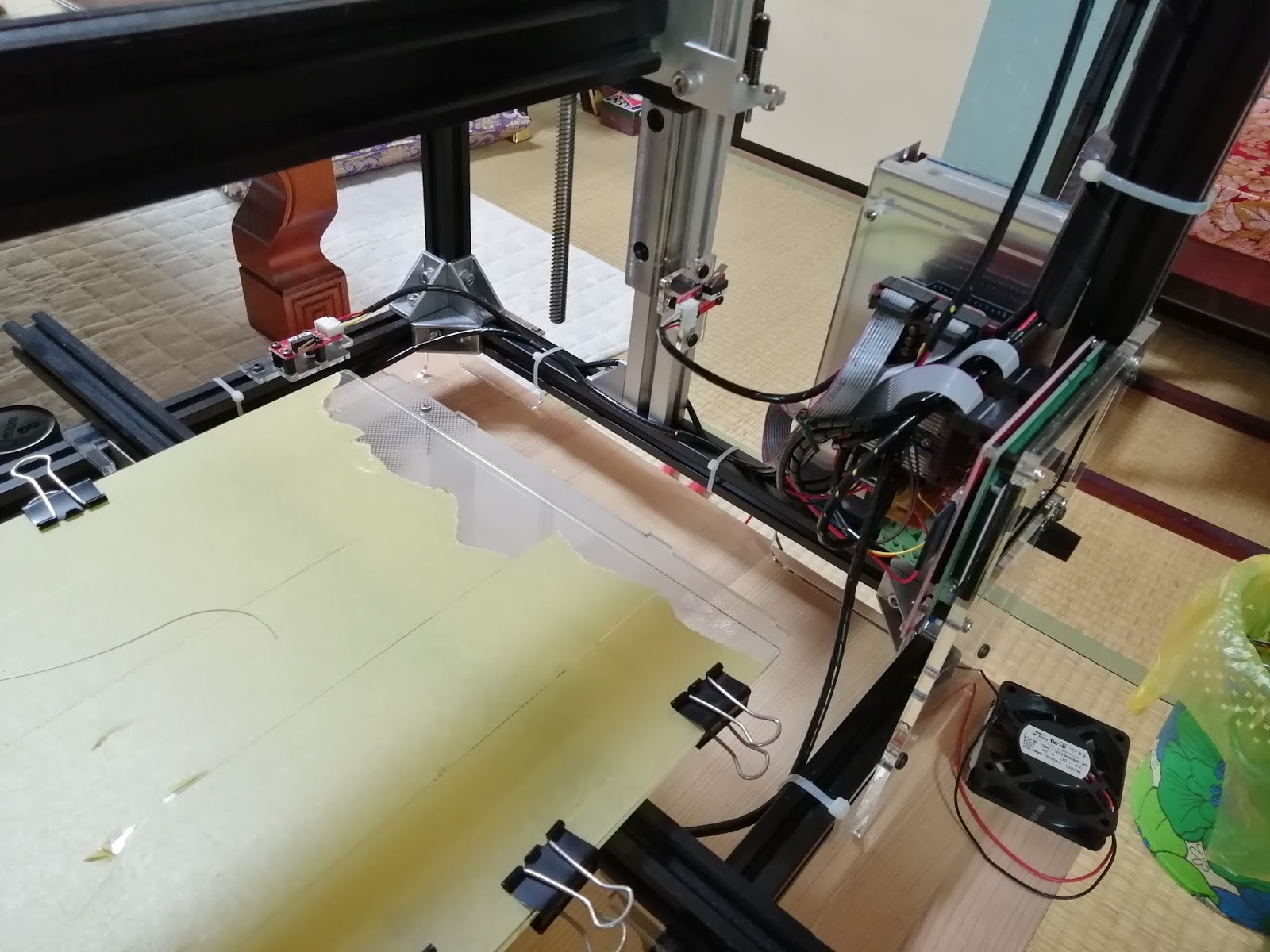
今ついている3Dプリンタの足と交換します。作業のためにプリンタを左側に横倒しにします。20mm角アルミフレームを使って頑丈に作っておりますので、横に倒したくらいではどうということはありません。
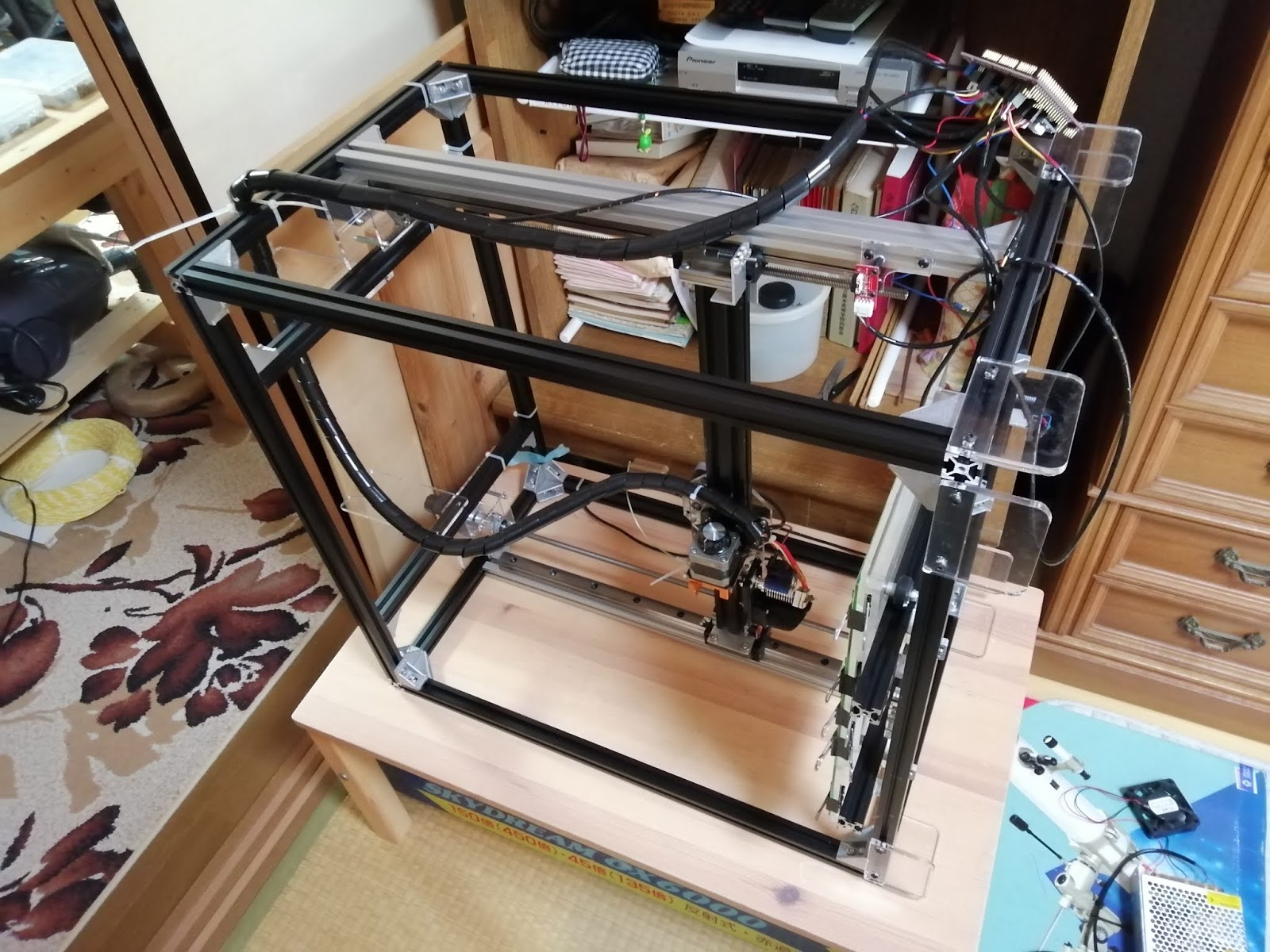
ヘッドが下に激突しないようにタイラップで止めとくくらいで十分です。
位置の確認をします。問題ありません。
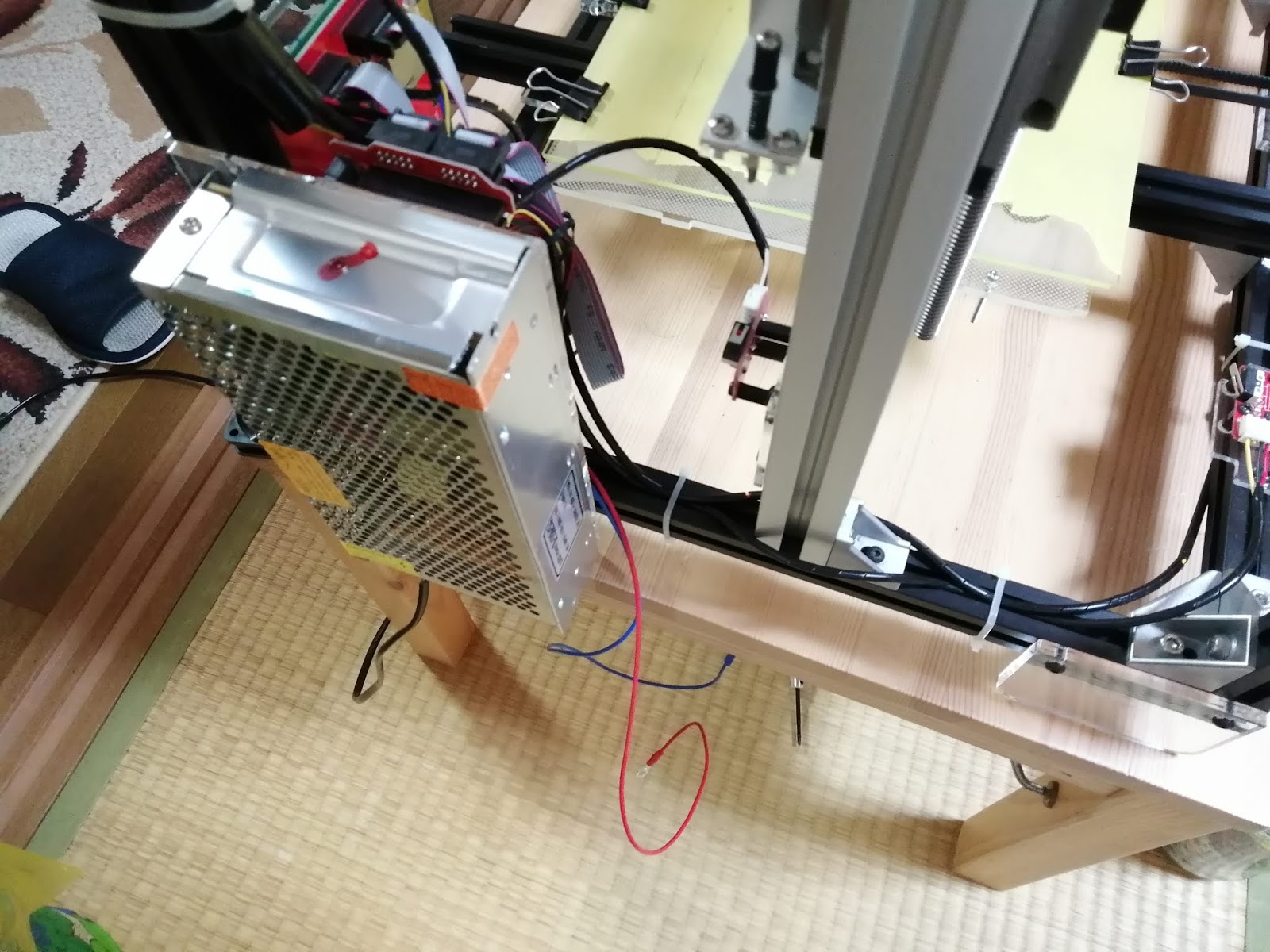
配線引き回しとまとめ方をしばし検討します。
レイアウト決めたら電源を固定します。電源は上下で穴位置が変わりますので、配線引き回しを決めてから穴を開けたかったのです。
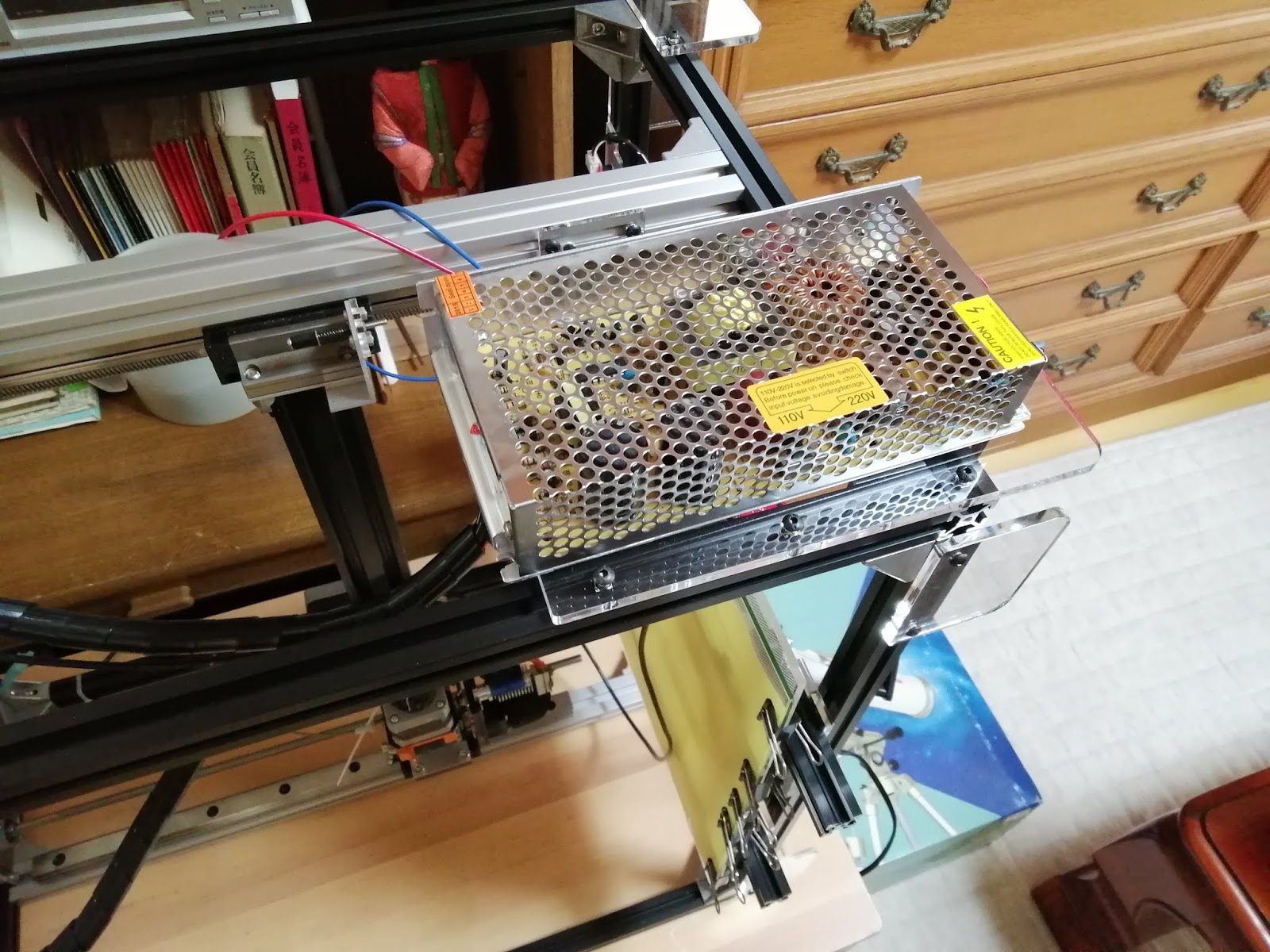
モジュールから逃げる位置に電源固定用の穴を開けます。
改めてフレームに固定して、
配線をまとめていきます。
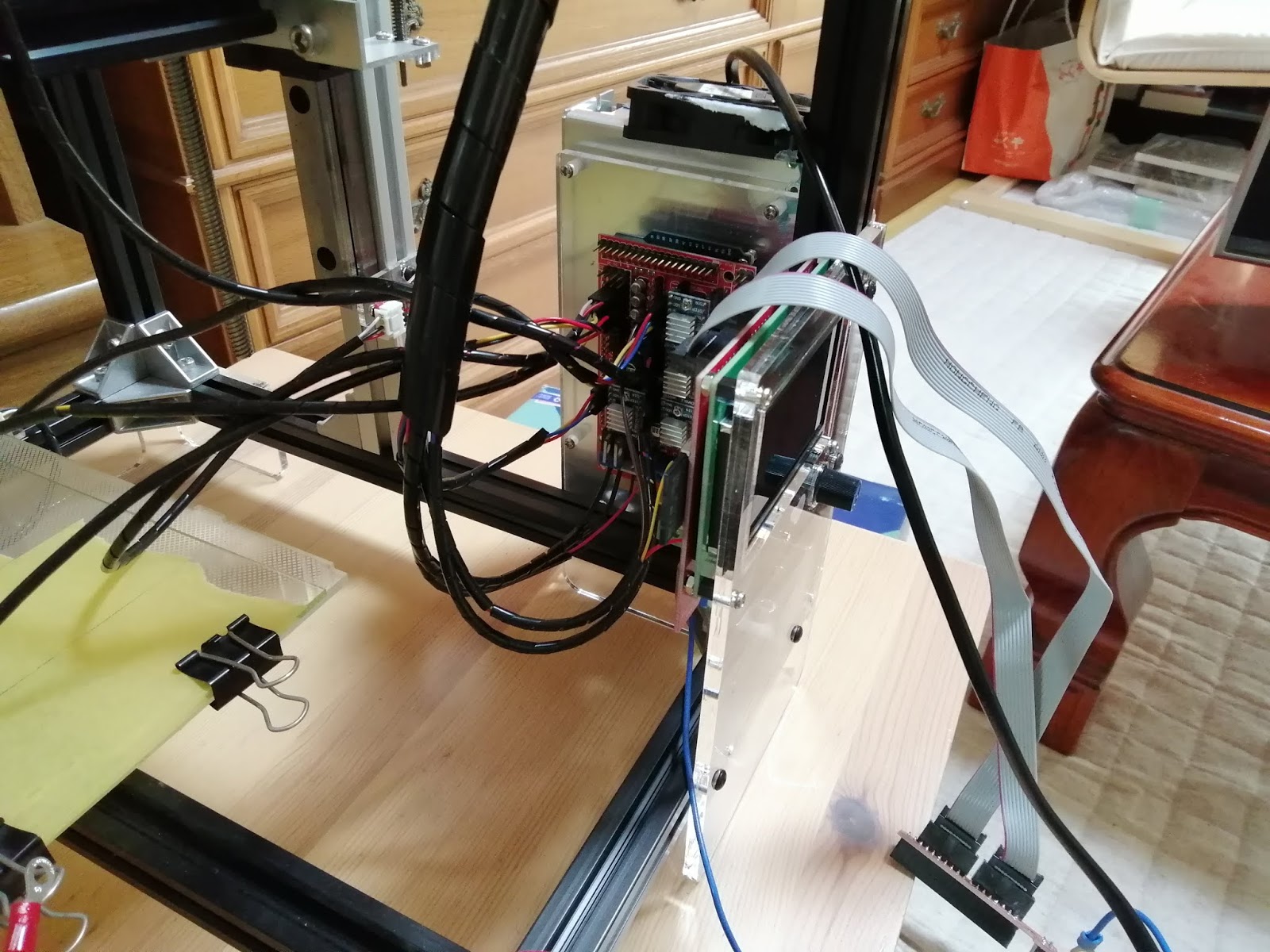
Y軸とZ軸はリミットスイッチとステッピングモータの電源だけですので比較的簡単。

できるだけフレームに沿わせてタイラップで止めていきます。
配線まとめたらプリンタを元通りに起こしておきます。
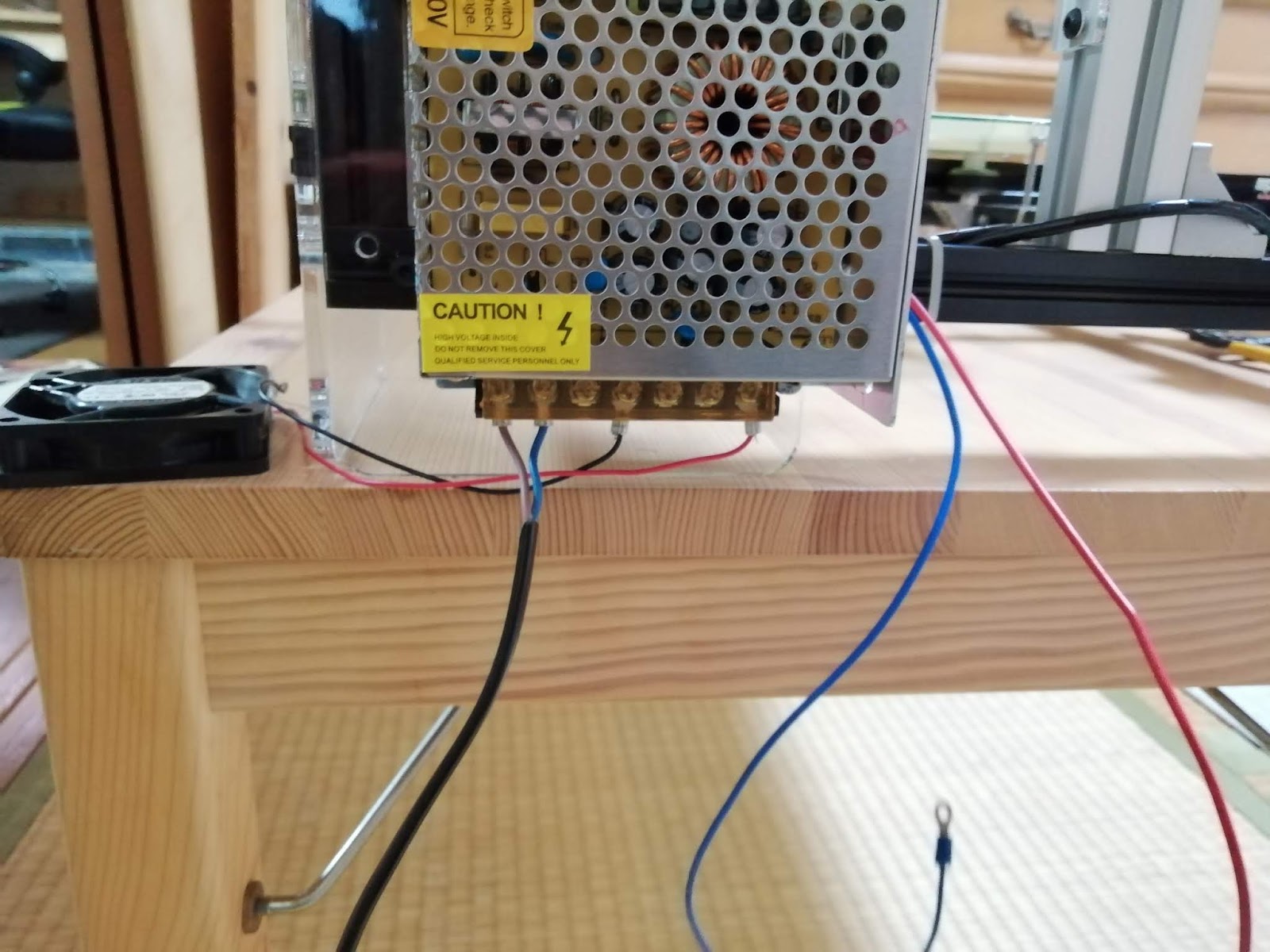
最後は電源配線。
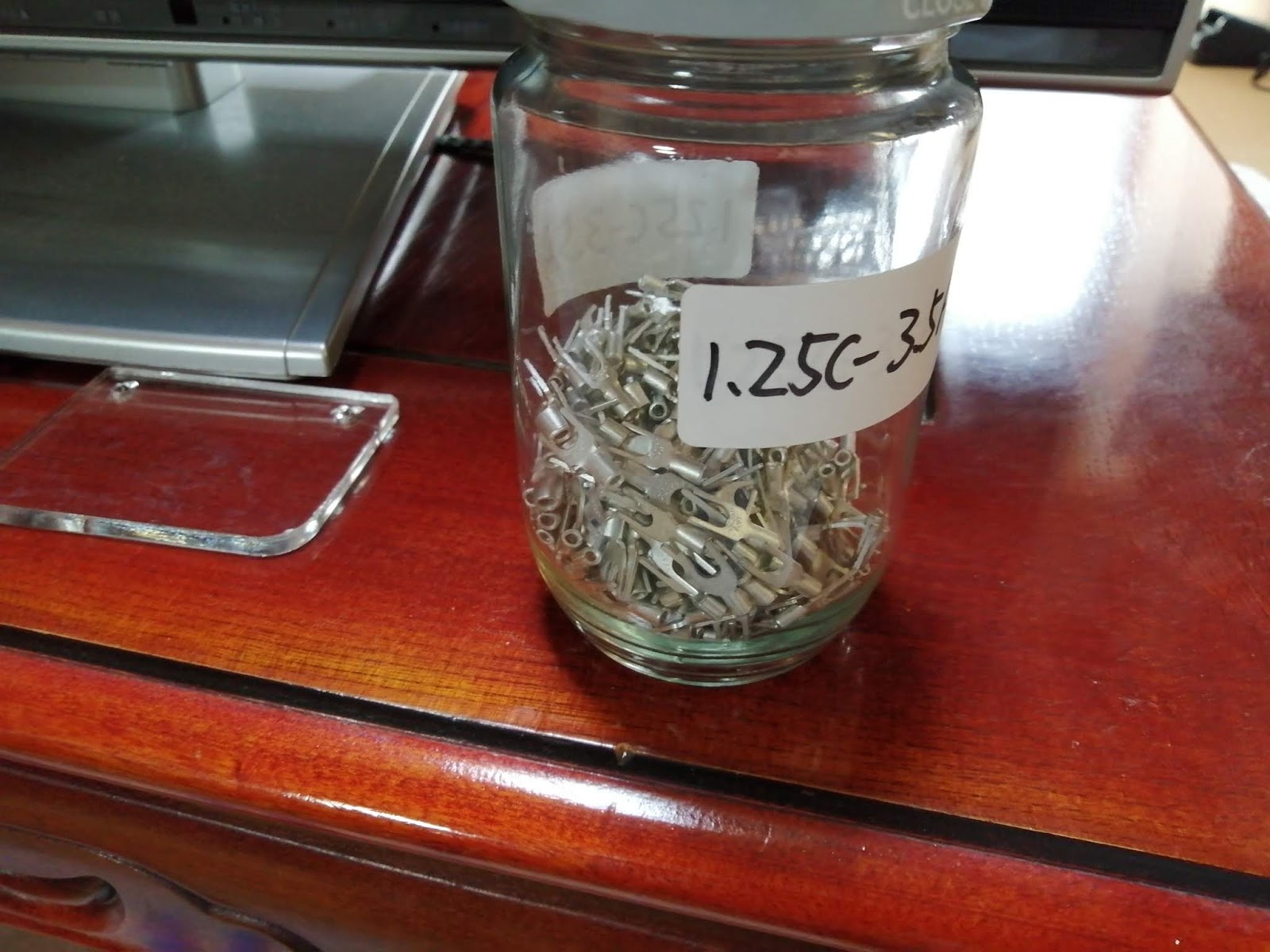
ここも余裕見て長めにしていたので、最適長さに切ってY端子をカシメて再接続します。
Y端子はしばらく前にメルカリでいくつかの種類をまとめて2000個くらい購入していたので山ほどあるのです。
完成。
まだまだ見苦しいところはありますが、今までと比べれば大きな改善です。
何といっても本体と制御部が一体化したのです。移動させるときにフレーム持ち上げれば完結します。素晴らしい(笑
通電して動作確認します。問題ありません。
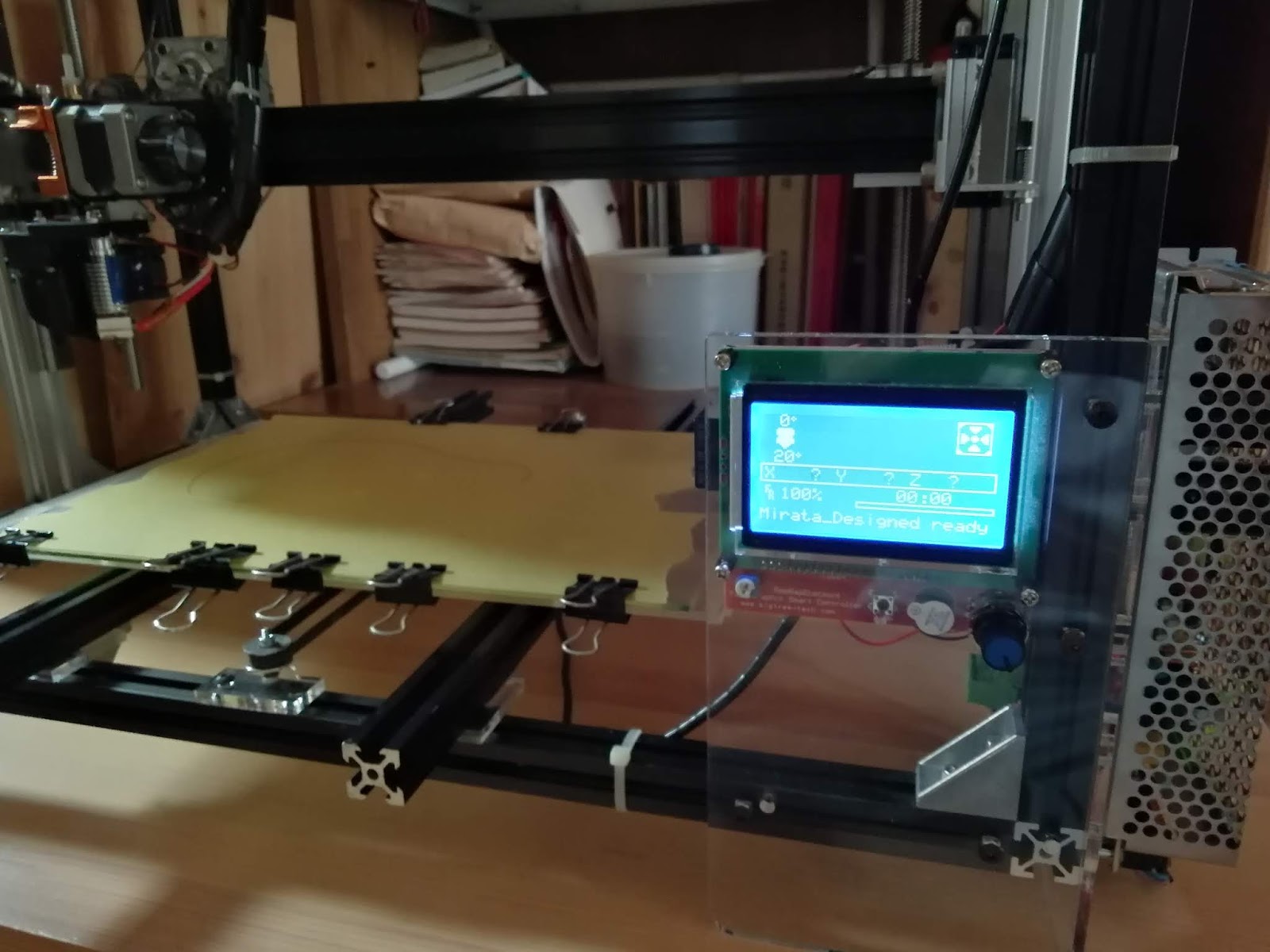
液晶が見下ろしになるのでやや見にくいですね。
コントラスト調整用の半固定の上にドライバーを突っ込むための穴をあけとけばよかったな。