ミクさんの右足がうまく出力できたことに気をよくして、一気に大型に挑戦してみました。いや、ちゃんと調整しないといけないのはわかってはいるのですが、ついですね(笑
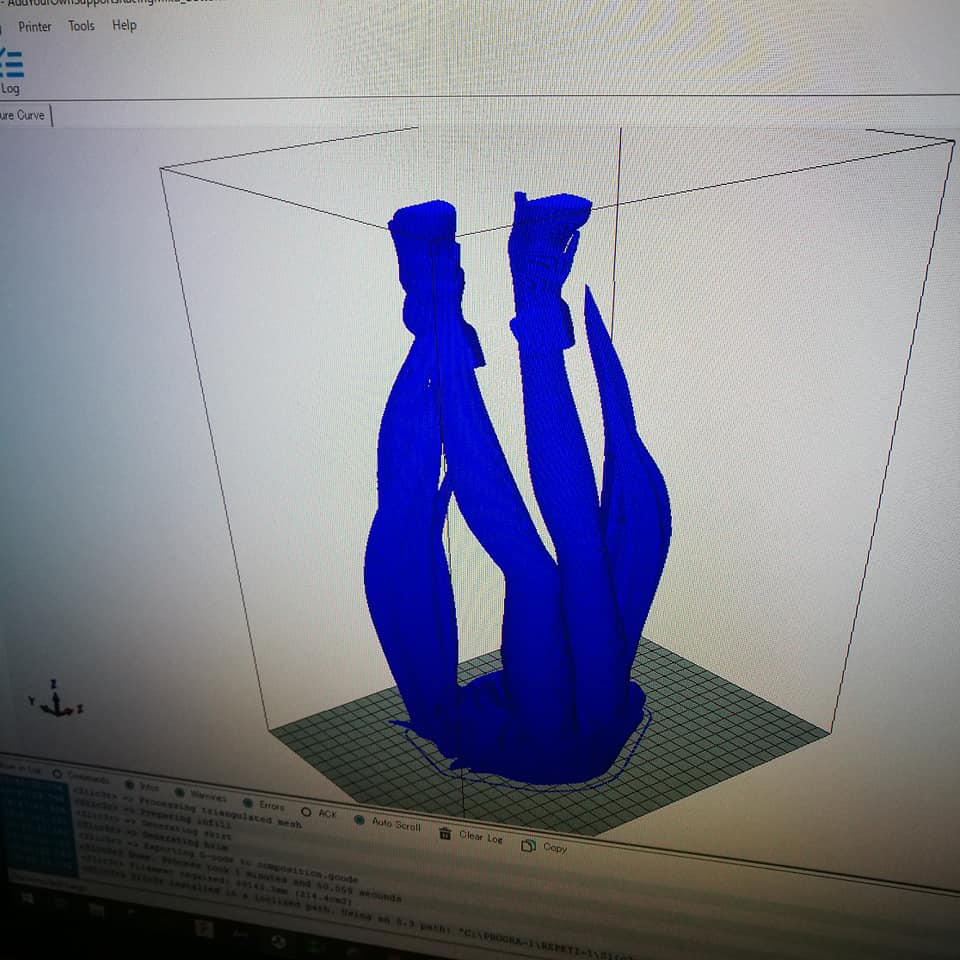
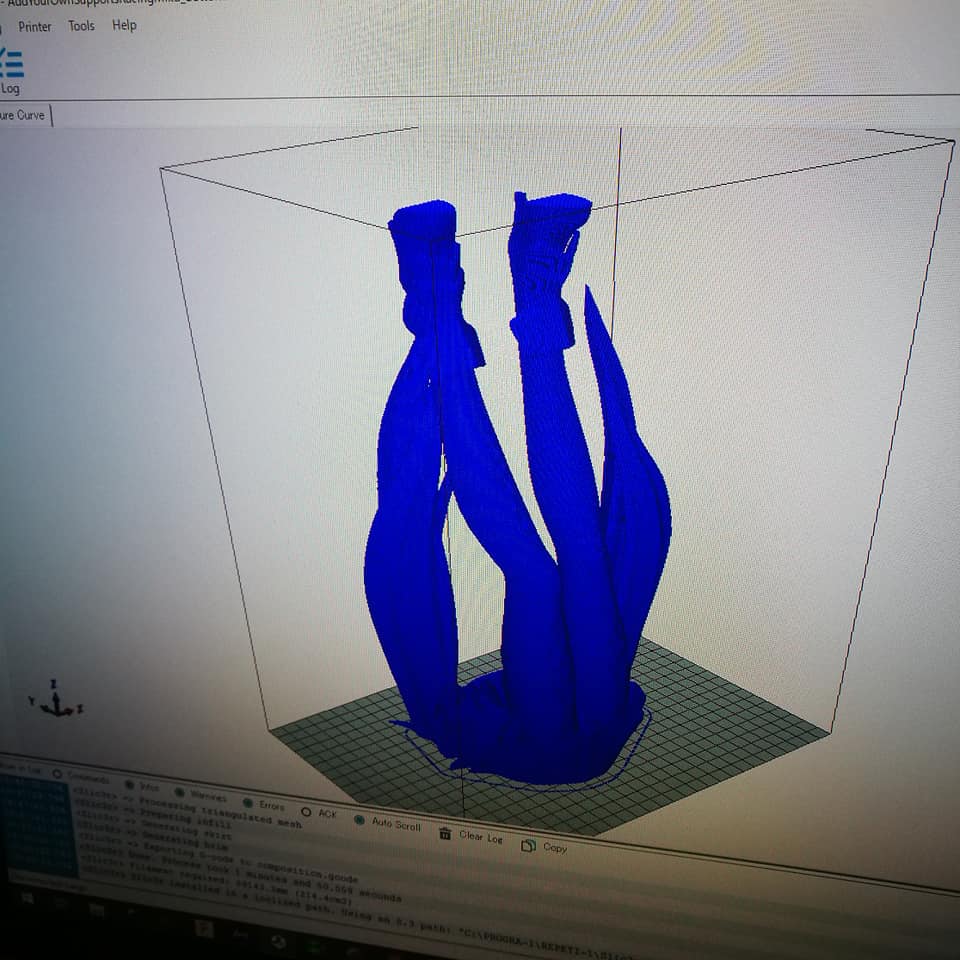
取り組んだのはこれ。
元になっているのはずっと取り組んでいるAnimu氏の3D PRINT READY!! 2015 Racing MIku です。ちなみにライセンスはクリエイティブコモンズのAttributionということで、改変自由なものです。
Animu氏の作品はそのほかのものも素晴らしい。ぜひお近づきになりたいものです。
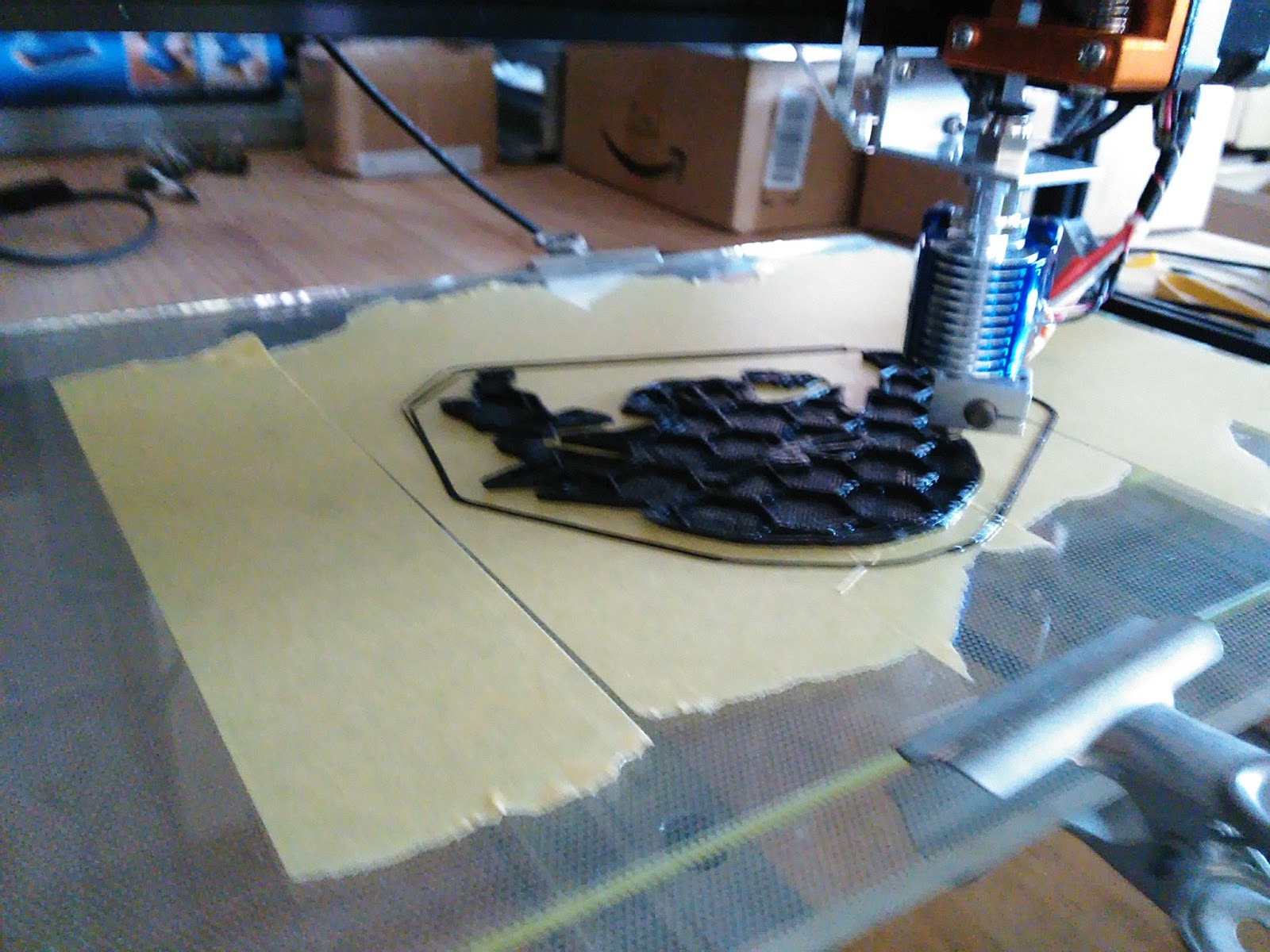
ということで、氏のフルデザインを下半身のみかっとしてひっくり返してプリントファイルを作りました。プリント時間27時間。フィラメントを88mも使うという大作です。
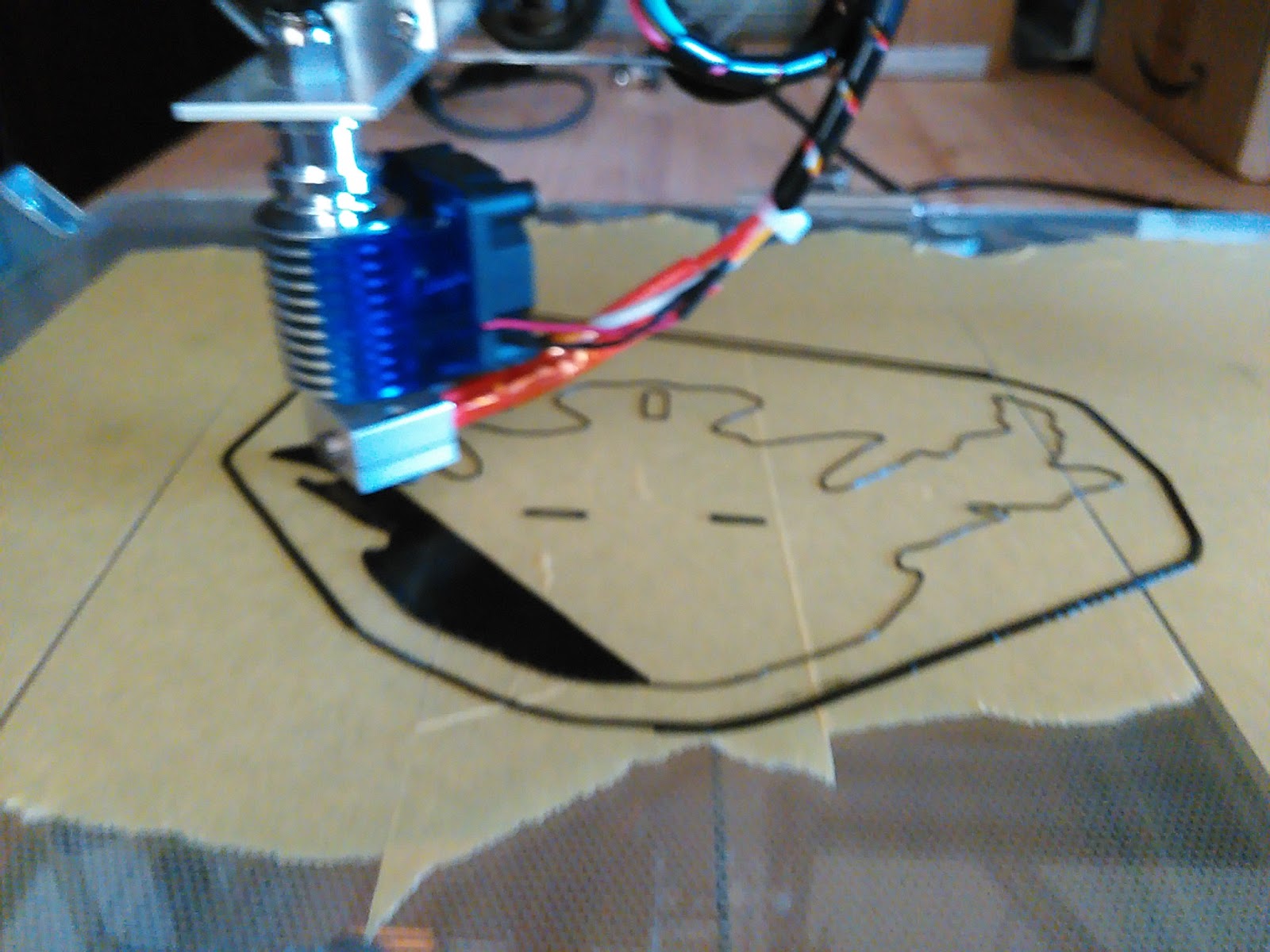
順調にスタート。Y軸も今のところ順調に動いております。
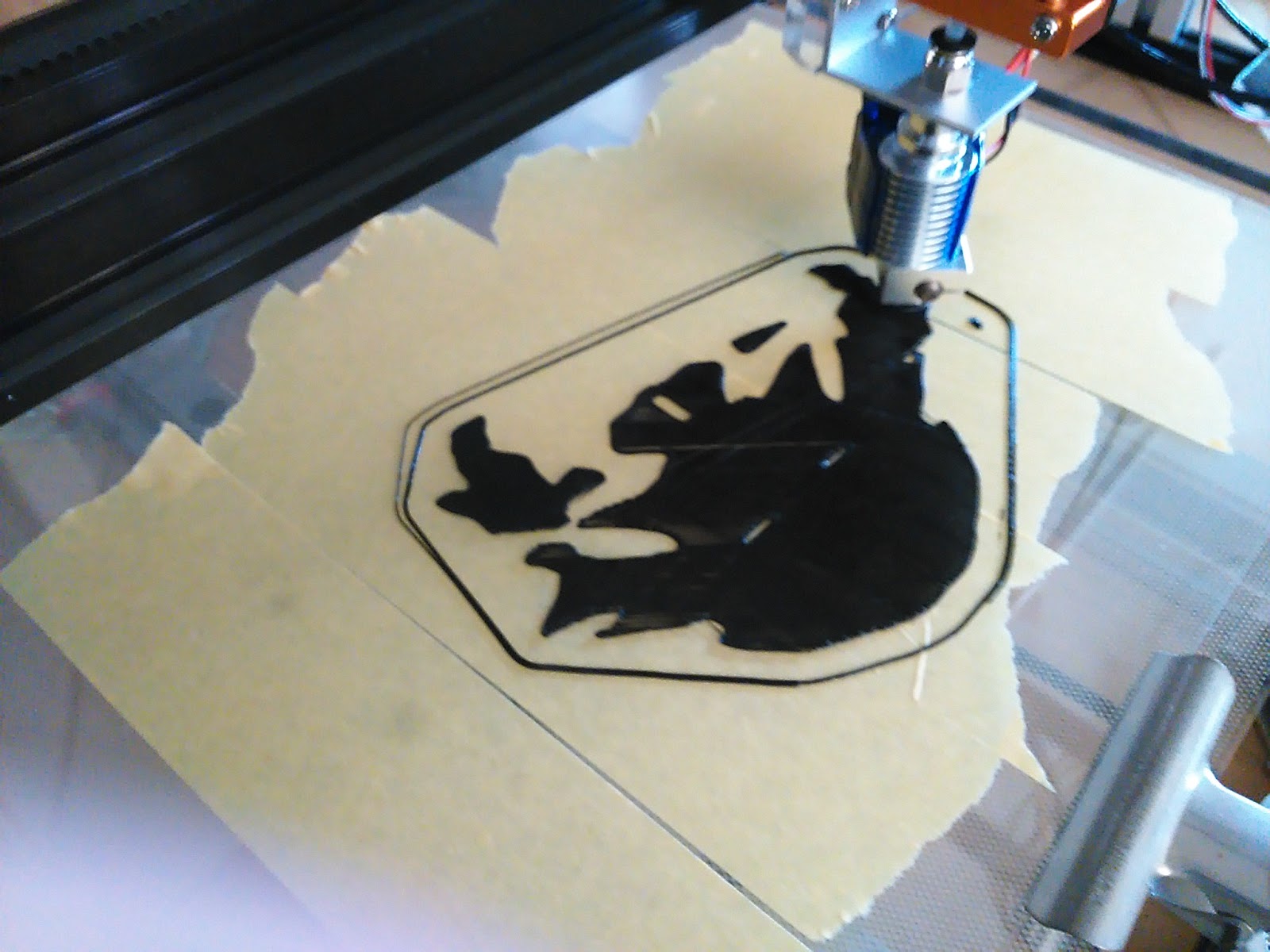
infillに入ったのでしめしめと思って屋根の塗装に向かいました。
で、しばらくして帰ってきたら(笑
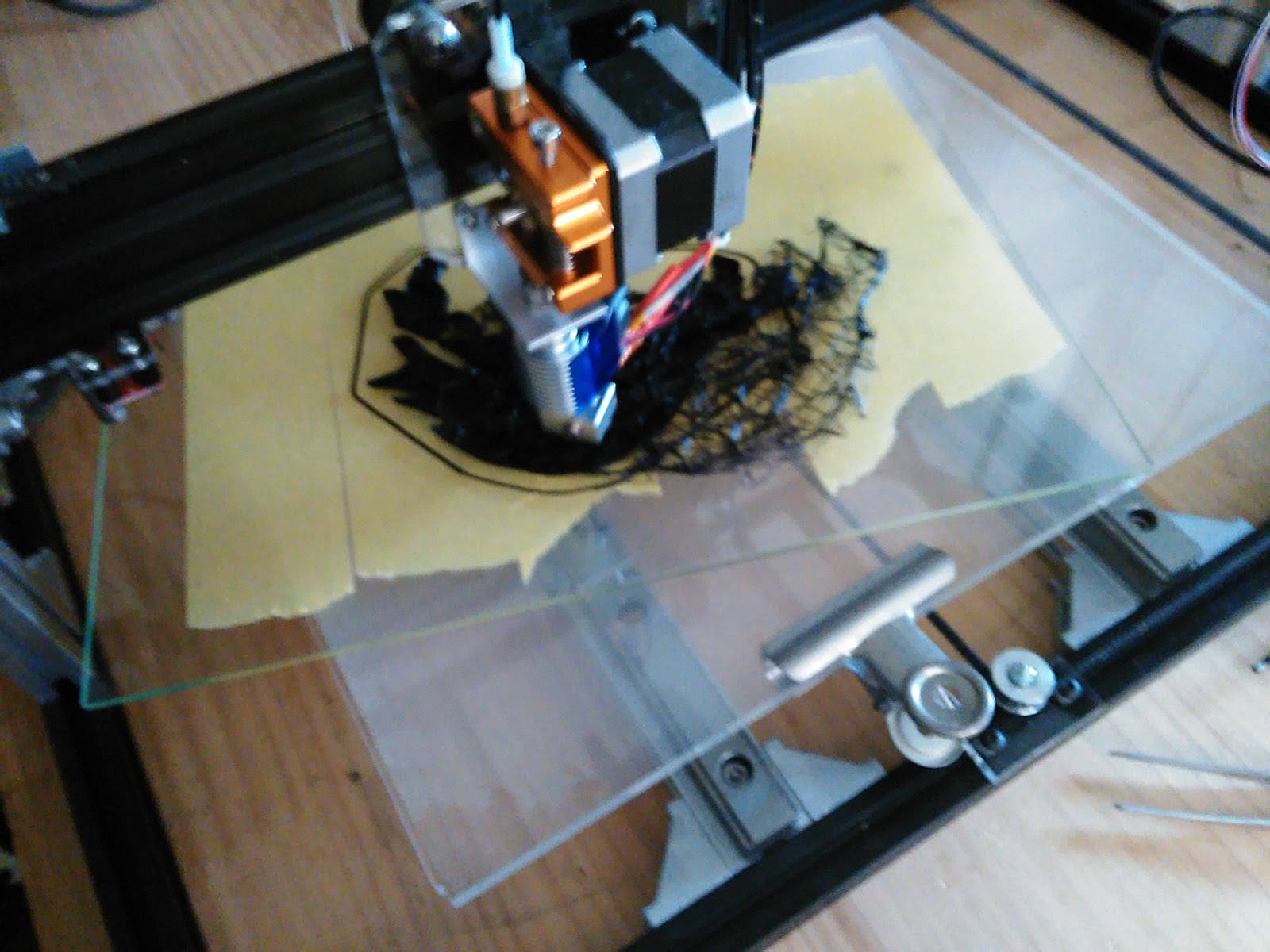
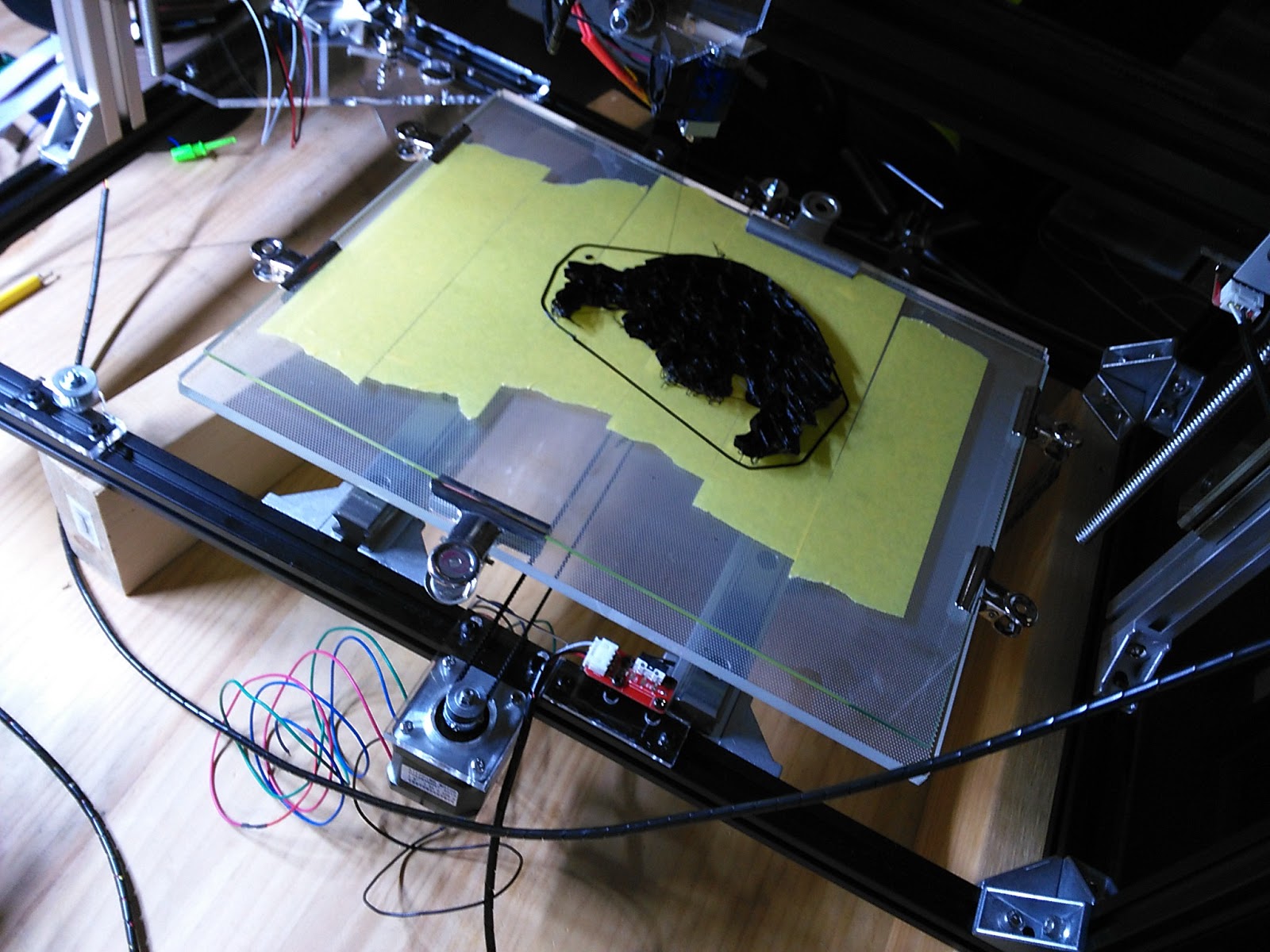
思いっきりガラス板がずれてました。
よく観察すると脱調のあと(段差)があり、そのあとでさらにガラス板がずれてスパゲティができた模様。
27時間どころか、3時間も経たずにテスト終了となりました。

ガラス板のずれはクリップを増やせばいいとして、問題はやはりY軸の脱調です。
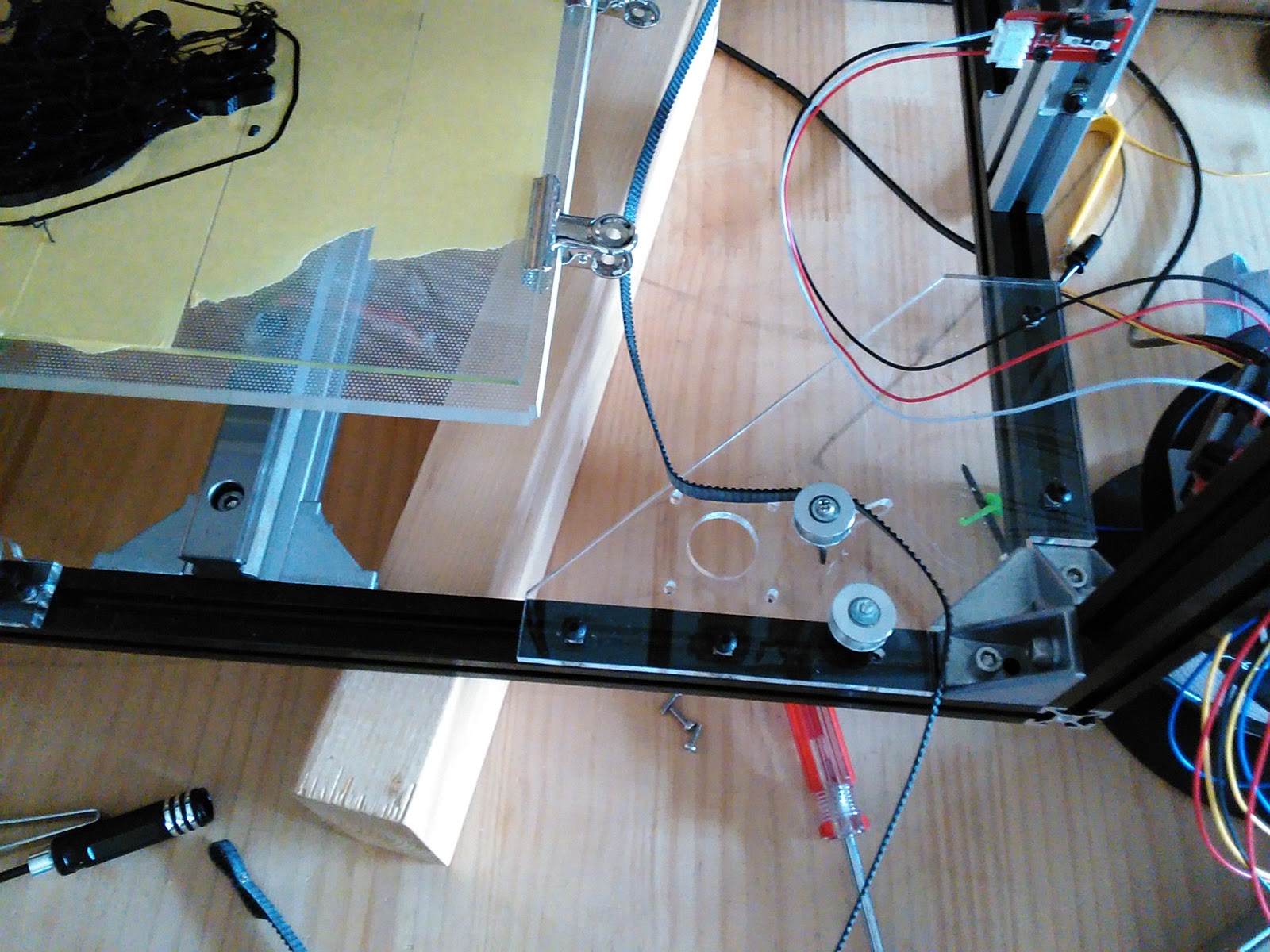
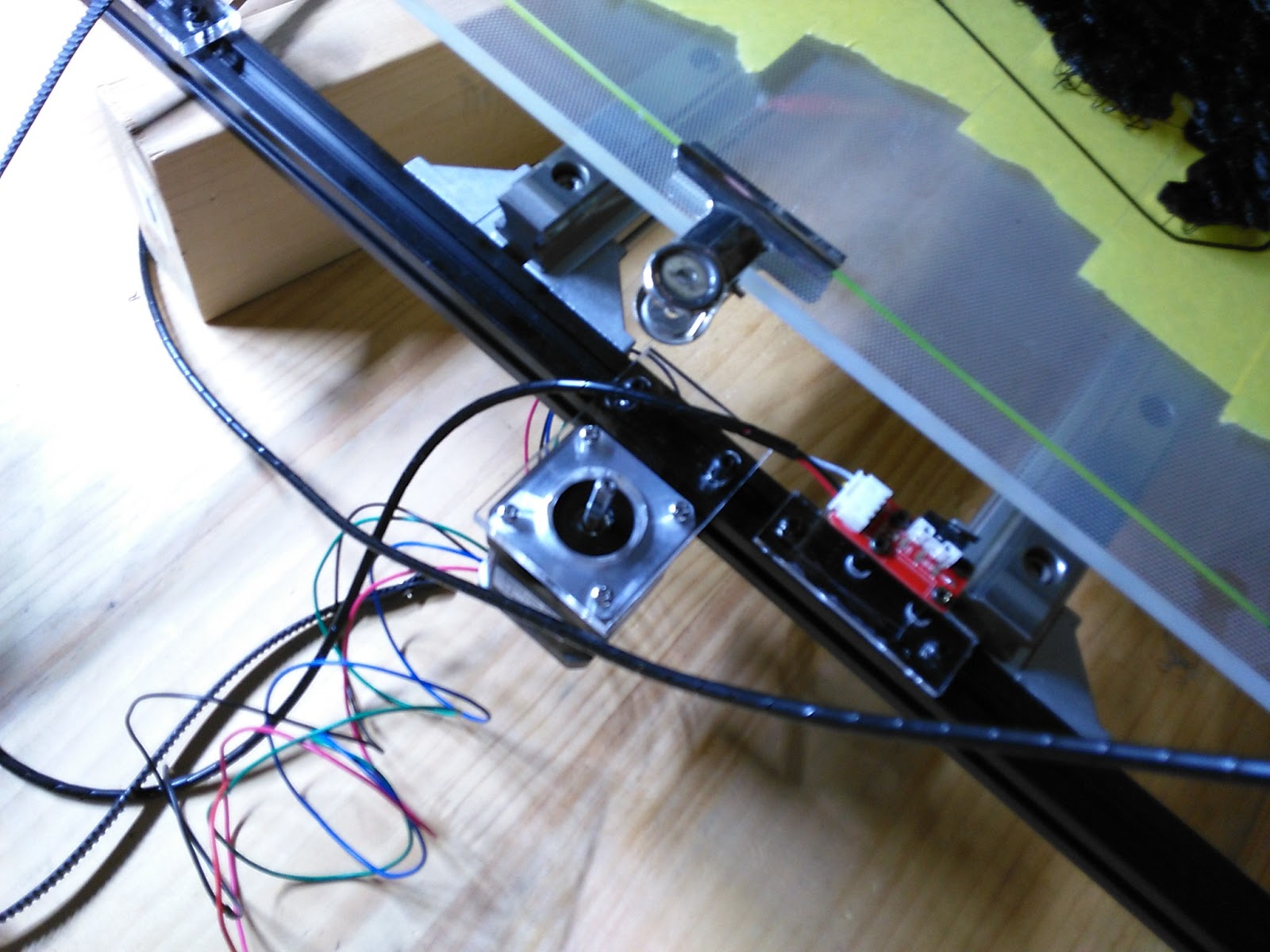
これは根本的な解決策を打たないとだめでしょう。ということで、ステージの横につけてベルトを引き回していたY軸の駆動系を素直な形に改造することにしました。
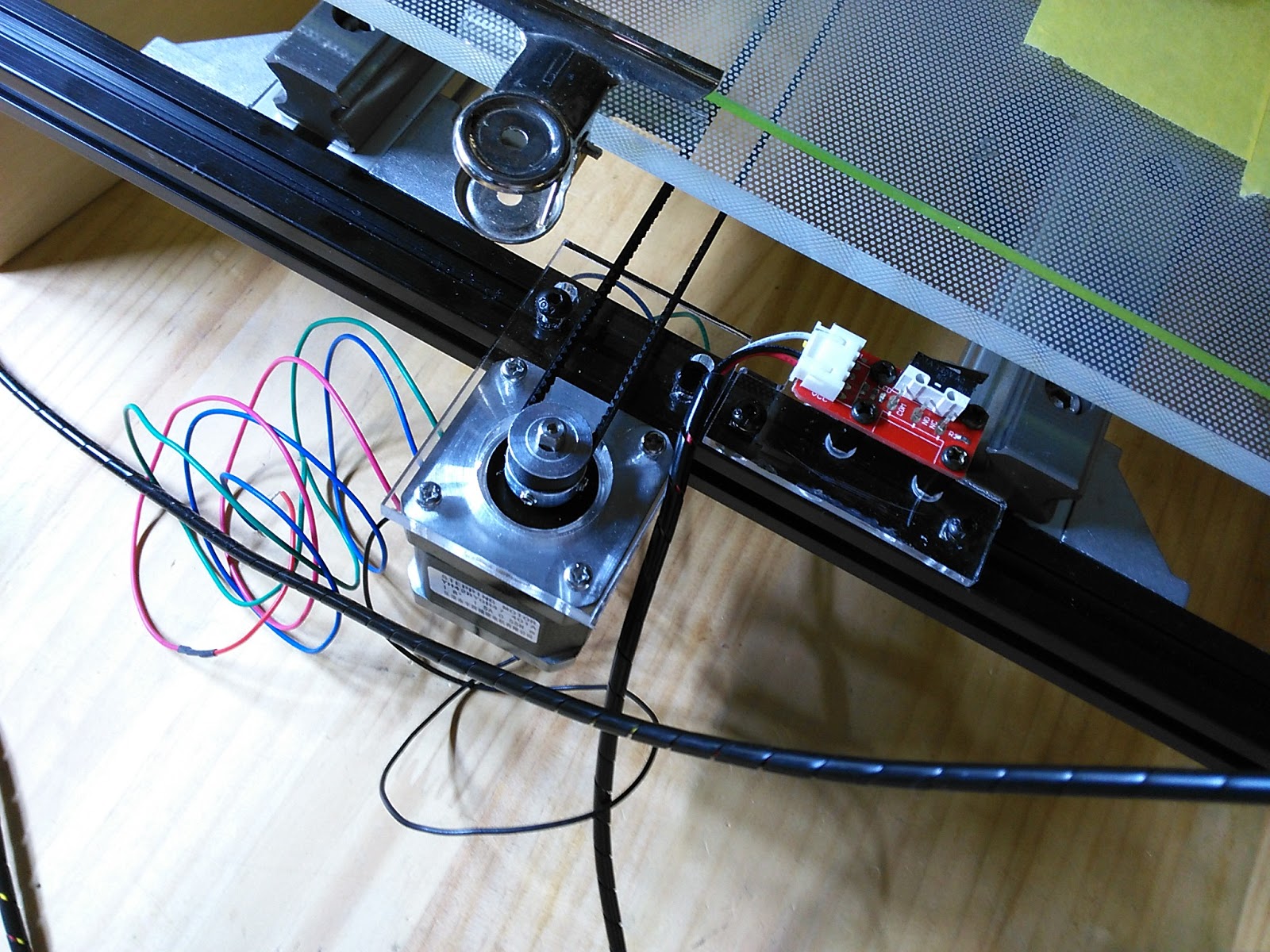
外しちゃってますが、モータがついていたのはここ。プーリーが5個もあって、ベルトも長々引き回していました。駆動の摩擦の点でもベルトの伸びの点でも信頼性が低くなる方向の設計でした。利点は、モータがフレームの外に飛び出さないのでデザインがすっきりしているというだけです(笑
はい。素直な形にします。
レーザ加工機でモータマウント用の5mmtアクリル板を切り出して、
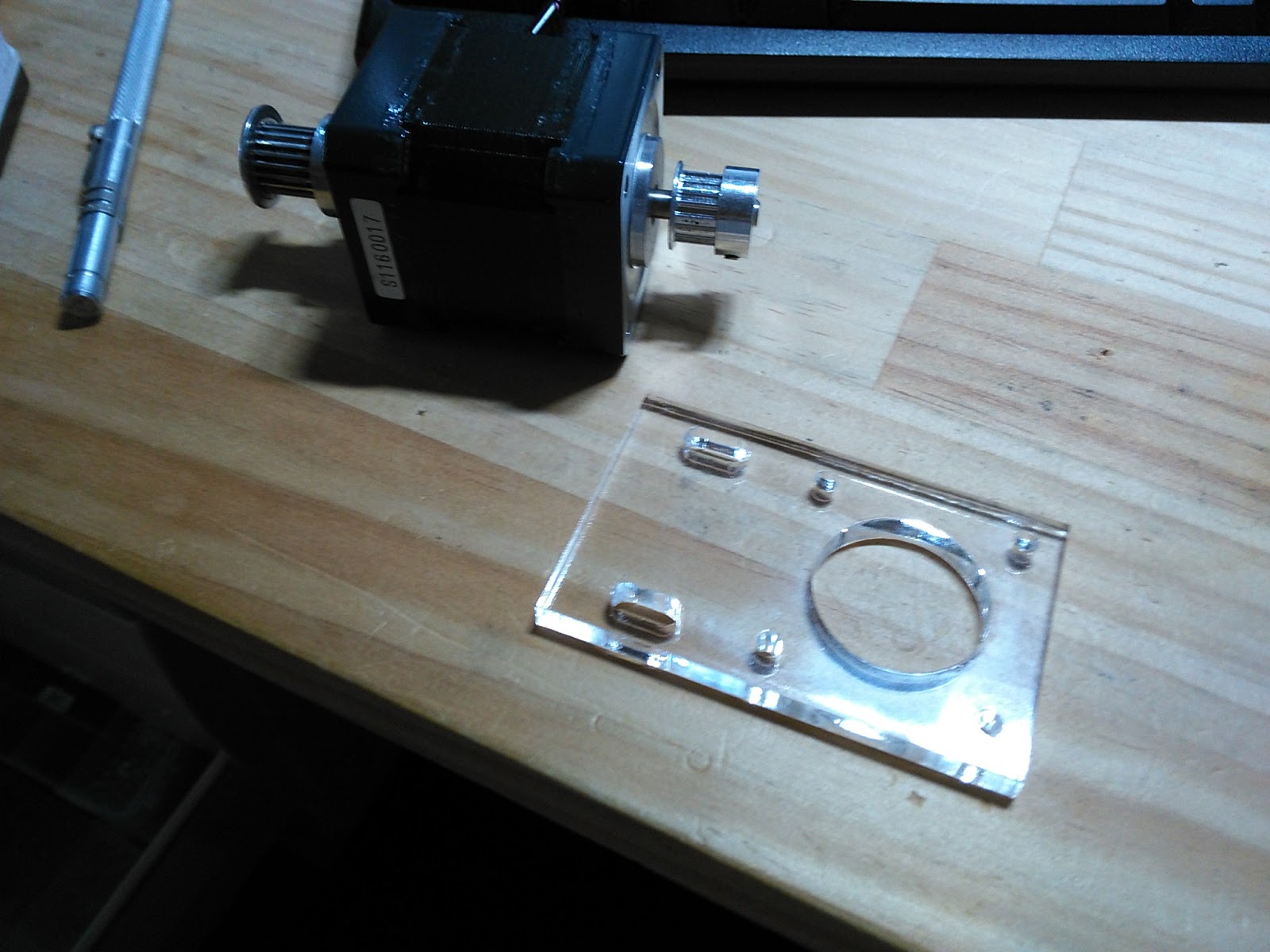
こんな感じにステージ中央後方に固定。
ベルトも作り直して、

ステージ下でスロット形状のループを作るだけのシンプルな構造に変更。
こんな感じです。後ろにも下にも飛び出しますのでかっこ悪いですがやむなしであります。
この状態でプリントしてみますと、
とりあえずは、きれいです。
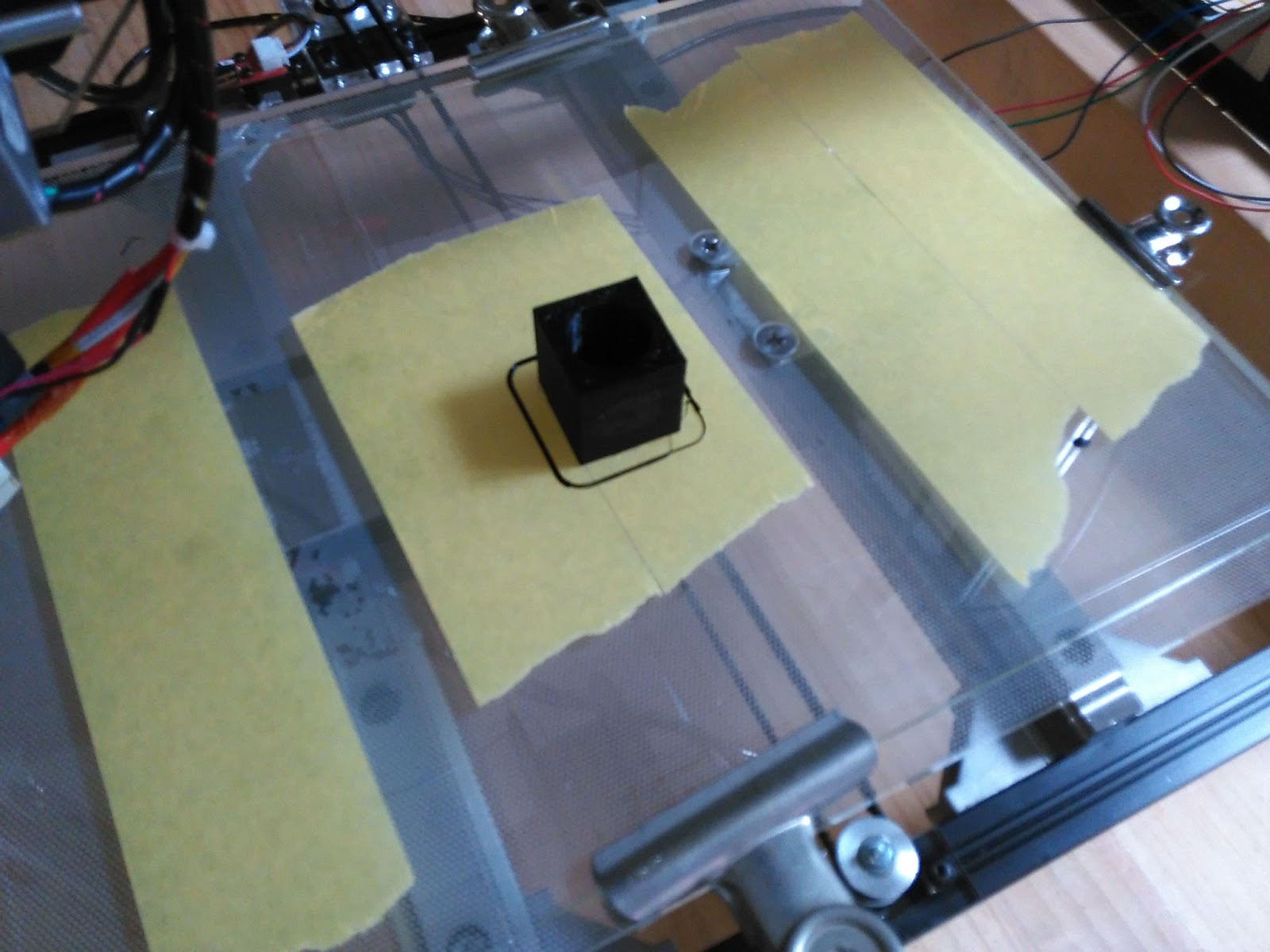
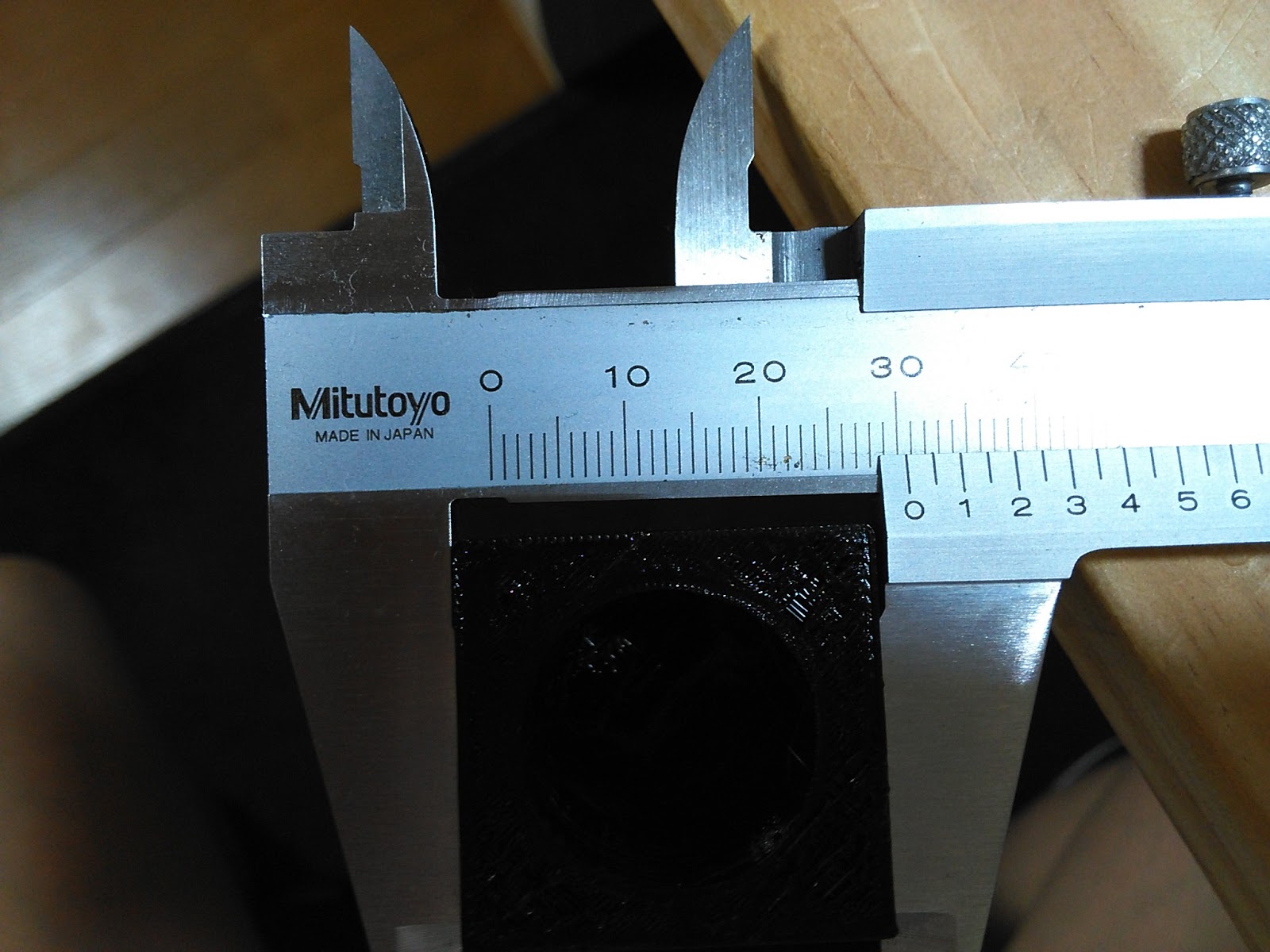
ついでですので、30mm角の立方体の三辺の長さを測定してstep/mm定数の補正をしておきます。
X軸方向が0.5mmくらい短くて、

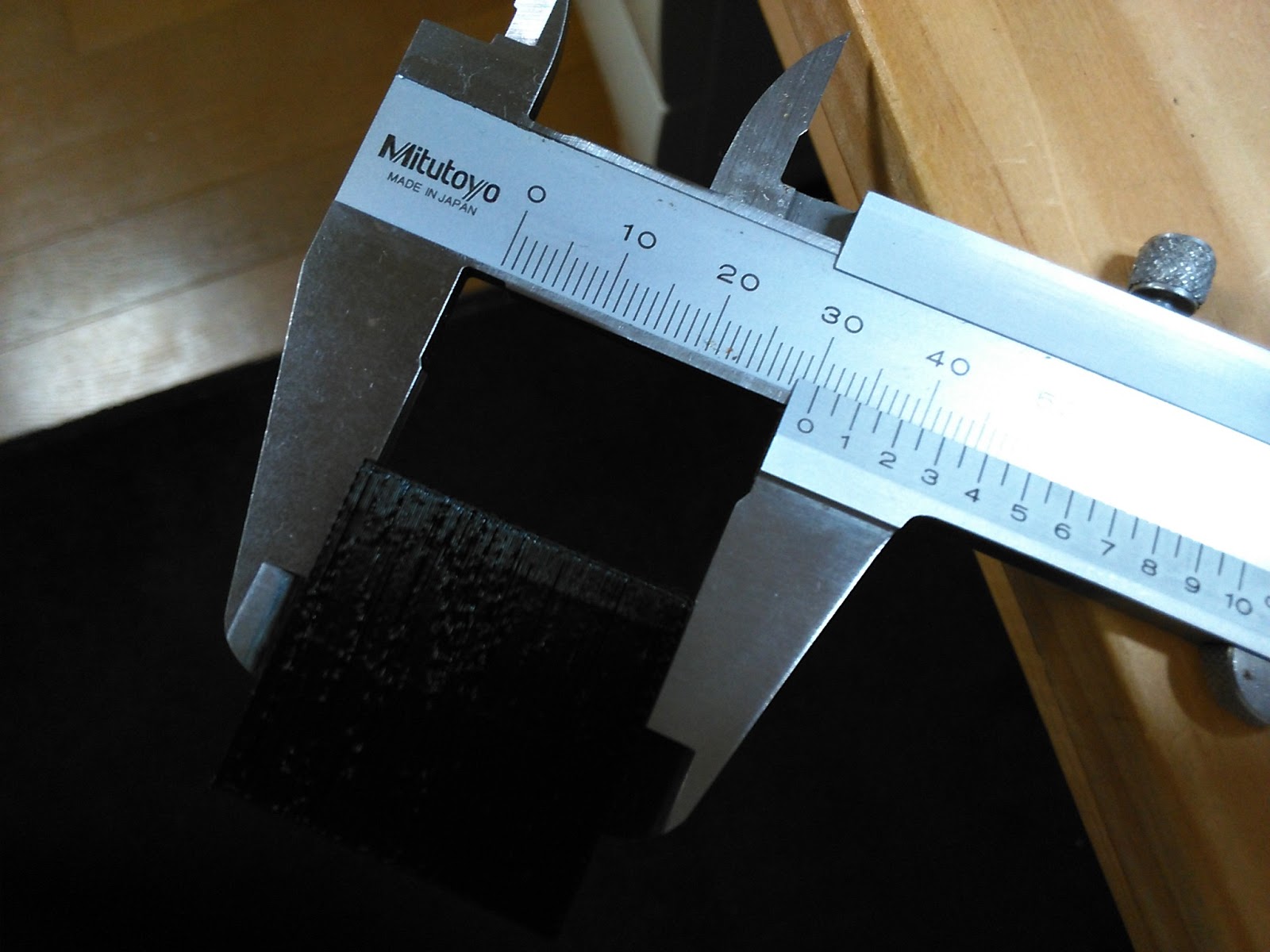
Y方向は0.3mmくらい長い。
高さも0.5mmくらい高いかな。これは原点の位置調整にもよりますが。
ということで、これはええやんと思って悦に入っていたY軸の駆動系ですが、結局オーソドックスなものにおちつきました。
変なスケベ心出さずに、地味に調整を進めたいと思います。