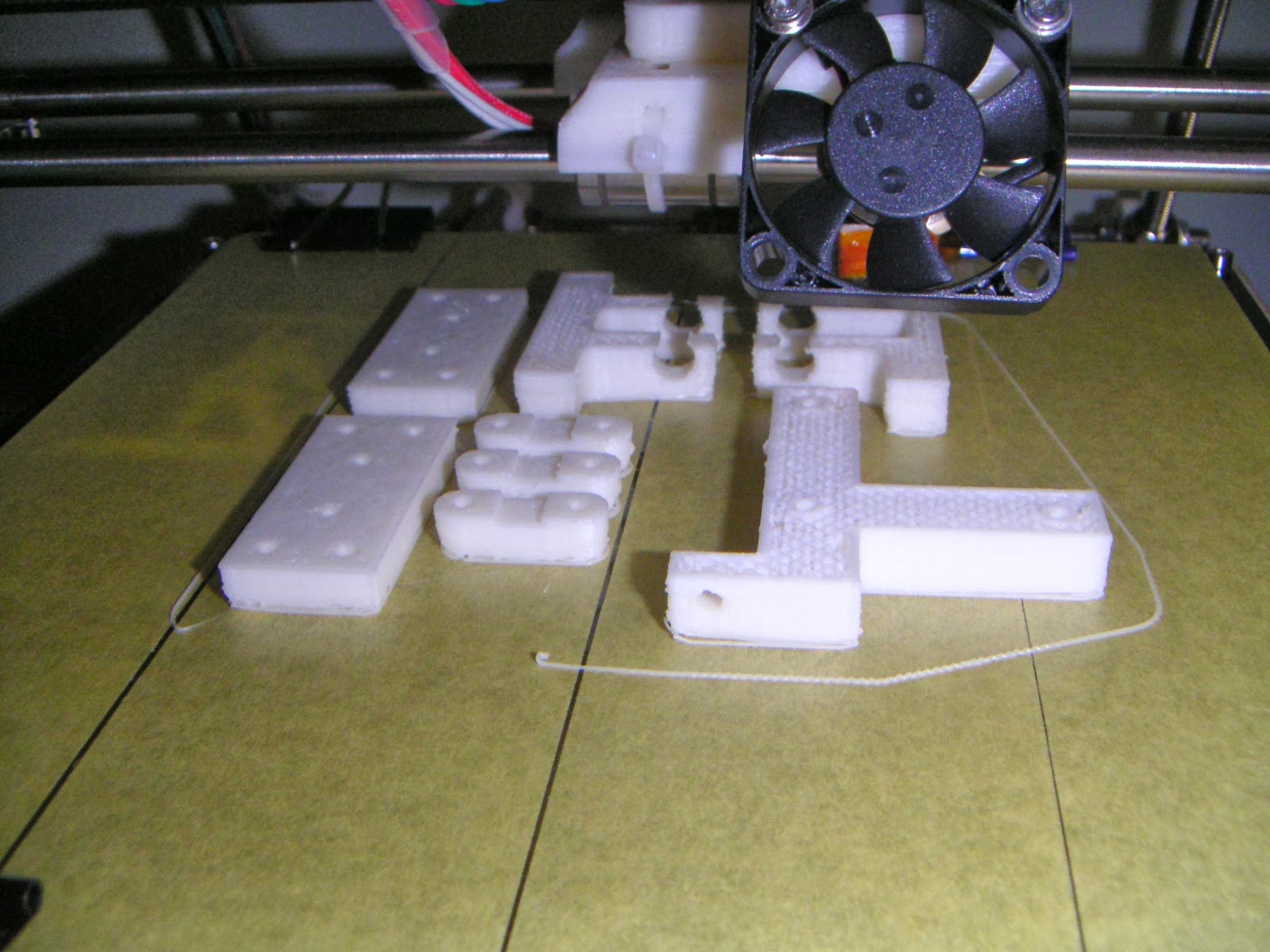
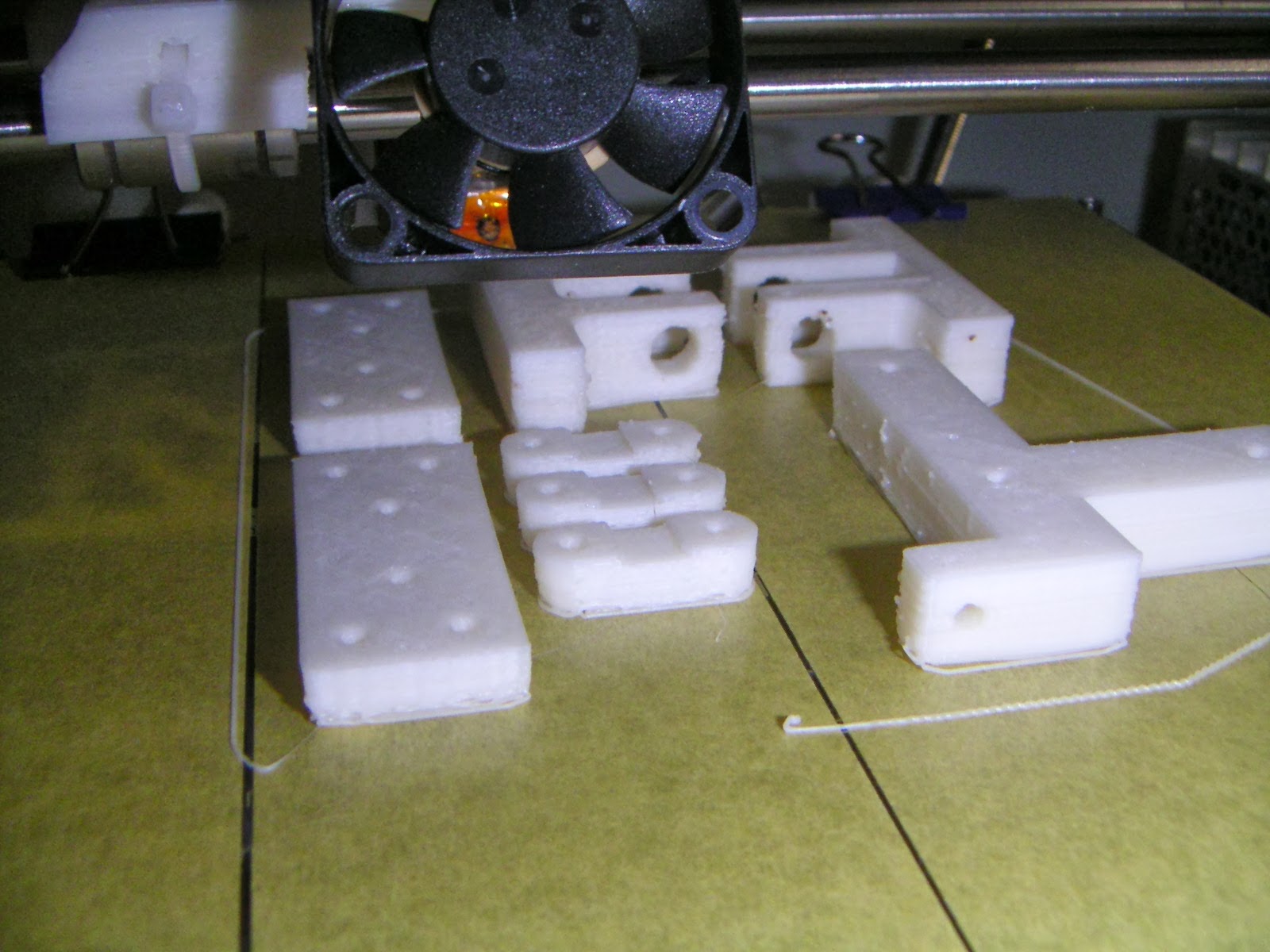
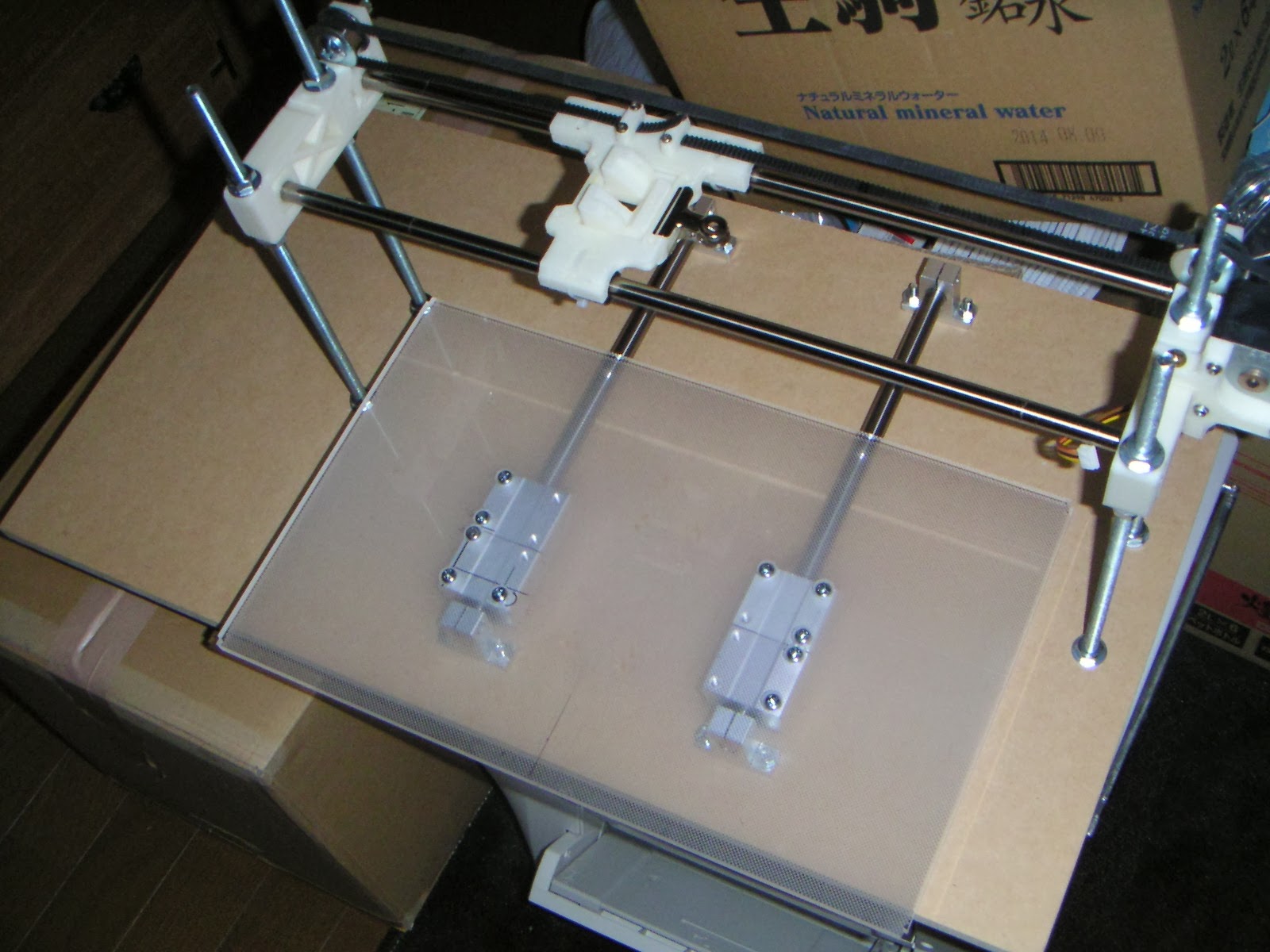
Y軸の設計を若干見直してY軸の稼動範囲を広げましたので、設計変更分のパーツをプリントしなおしました。
この程度の物であれば3時間くらいで出来ます。
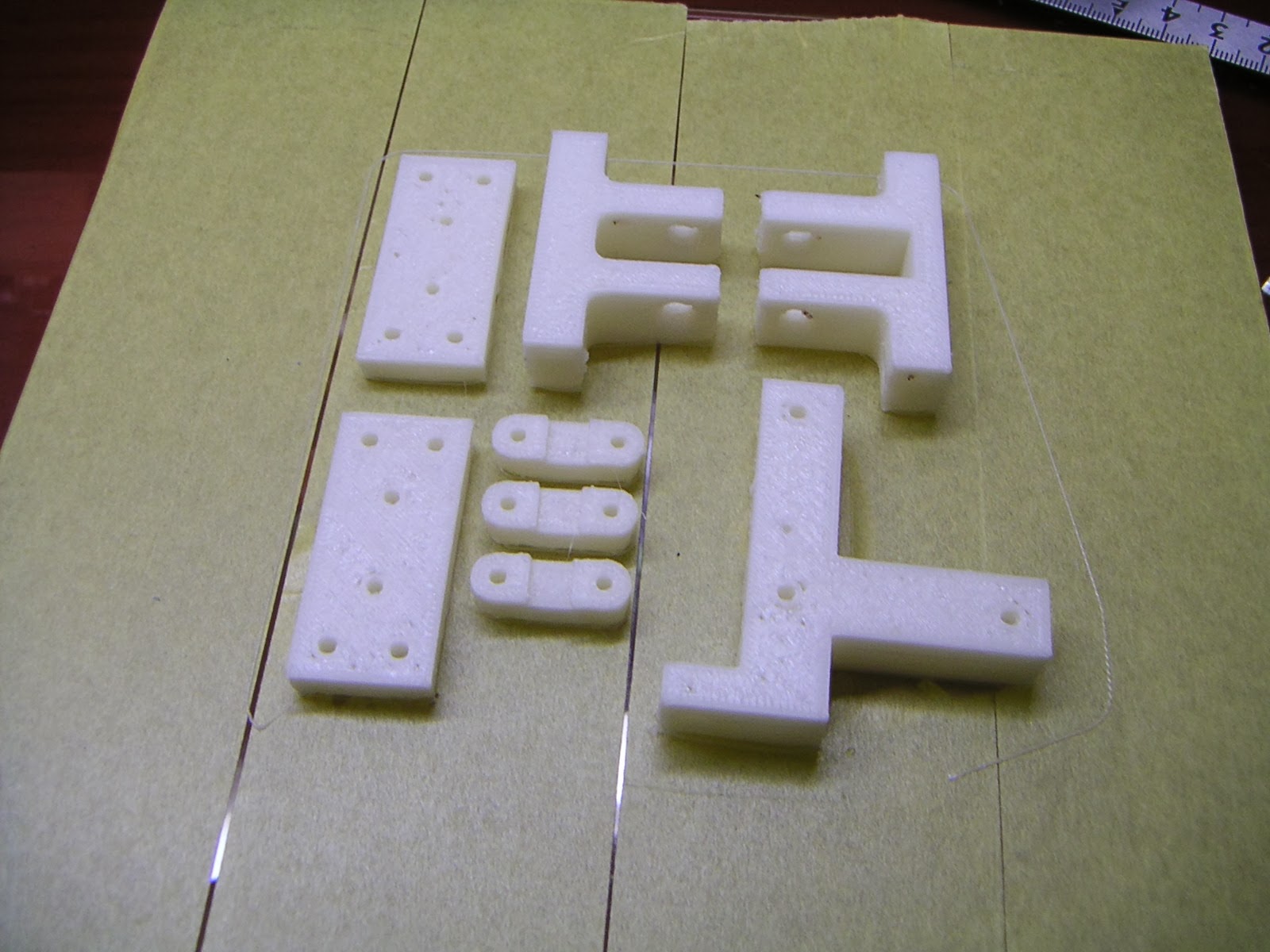
完成。
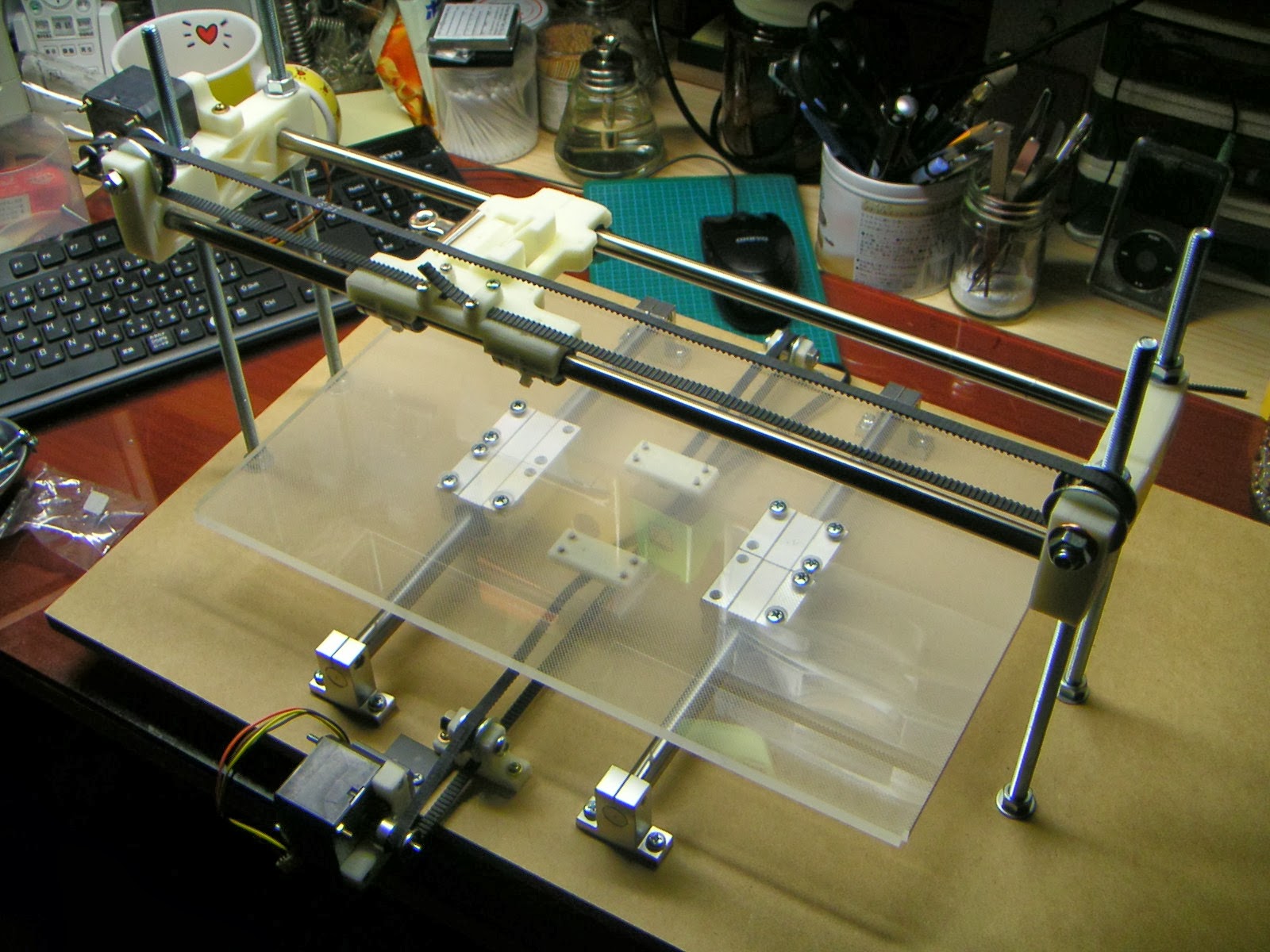
ということで、アクリルの板に穴を開けてリニアブロックに仮止めします。
写真でみても中央のちょっとしか支えていないのですが、これで十分縁の方も剛性があるのです。
こんな感じ。最初は全部ネジ止めしようかと思いましたが、いくつかつけてみると全くガタが無いのでこの状態でやめました。
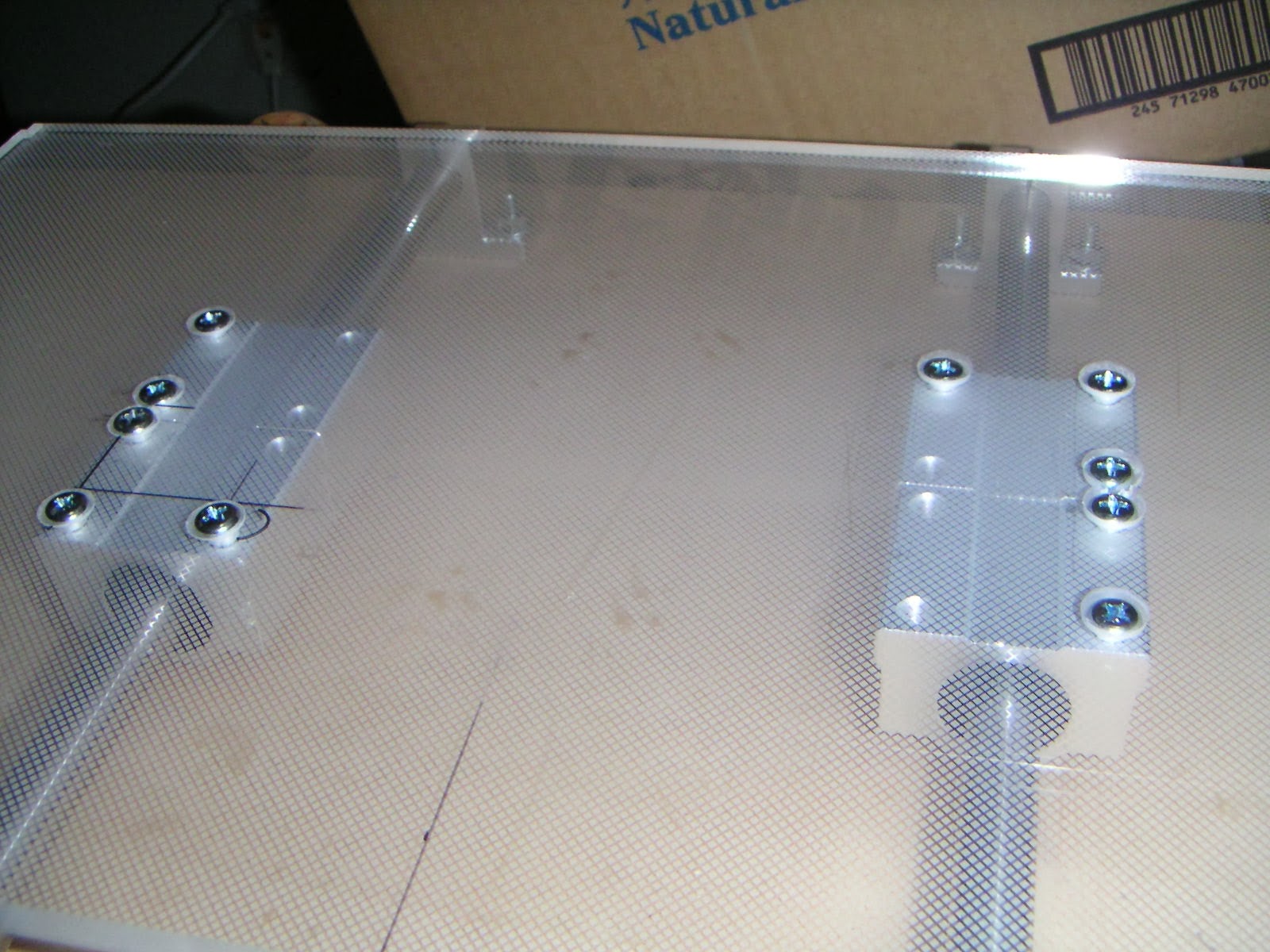
ネジ穴はざぐってなべネジがステージ面から沈むようにしています。
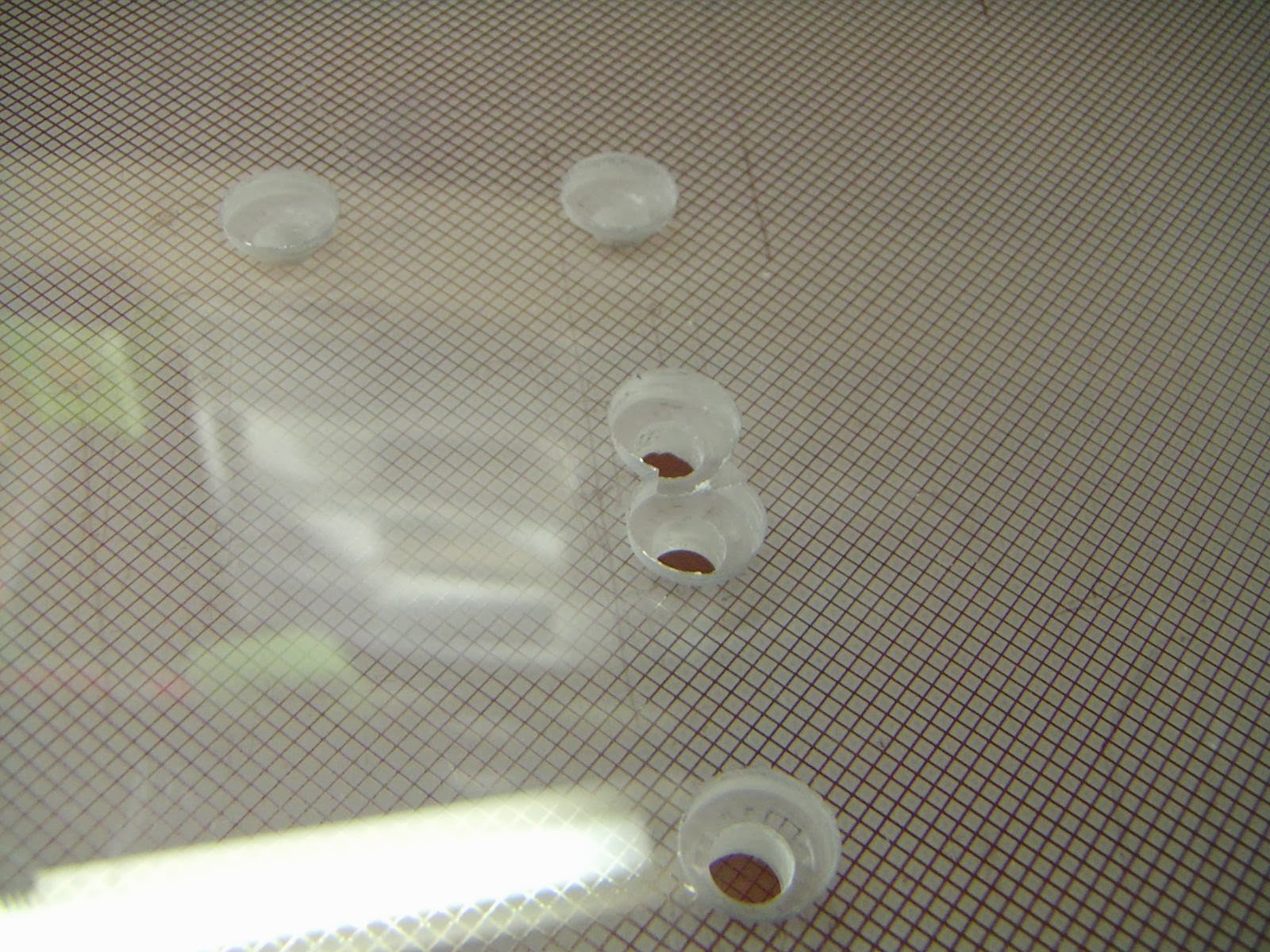
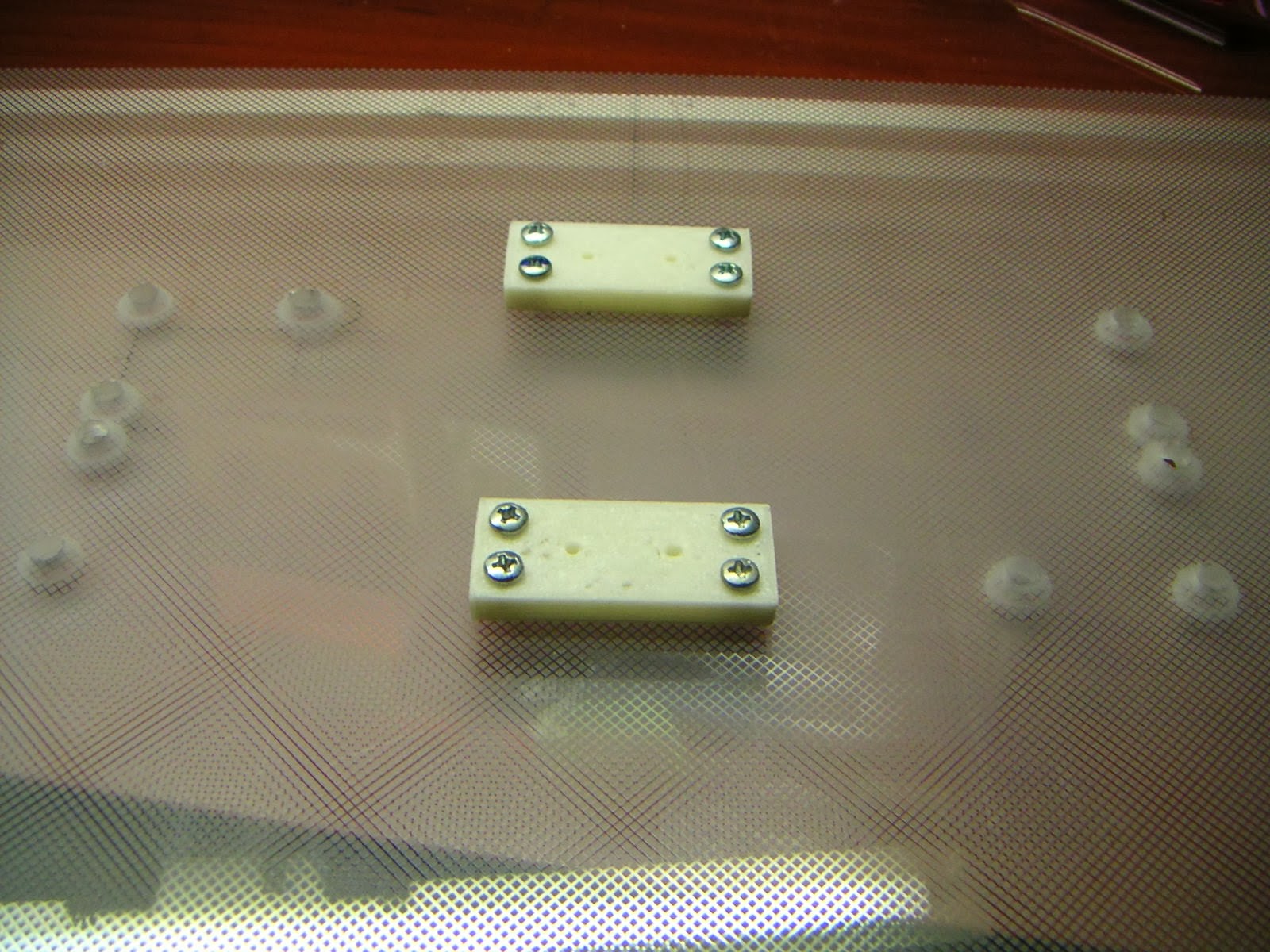
ステージの裏にベルトクリップの台座をタッピングで止めます。アクリルにタッピングというのはちょっとどきどきしましたが、2.5mmφの下穴にM3タッピングで何の問題もなくがっちりと付きました。
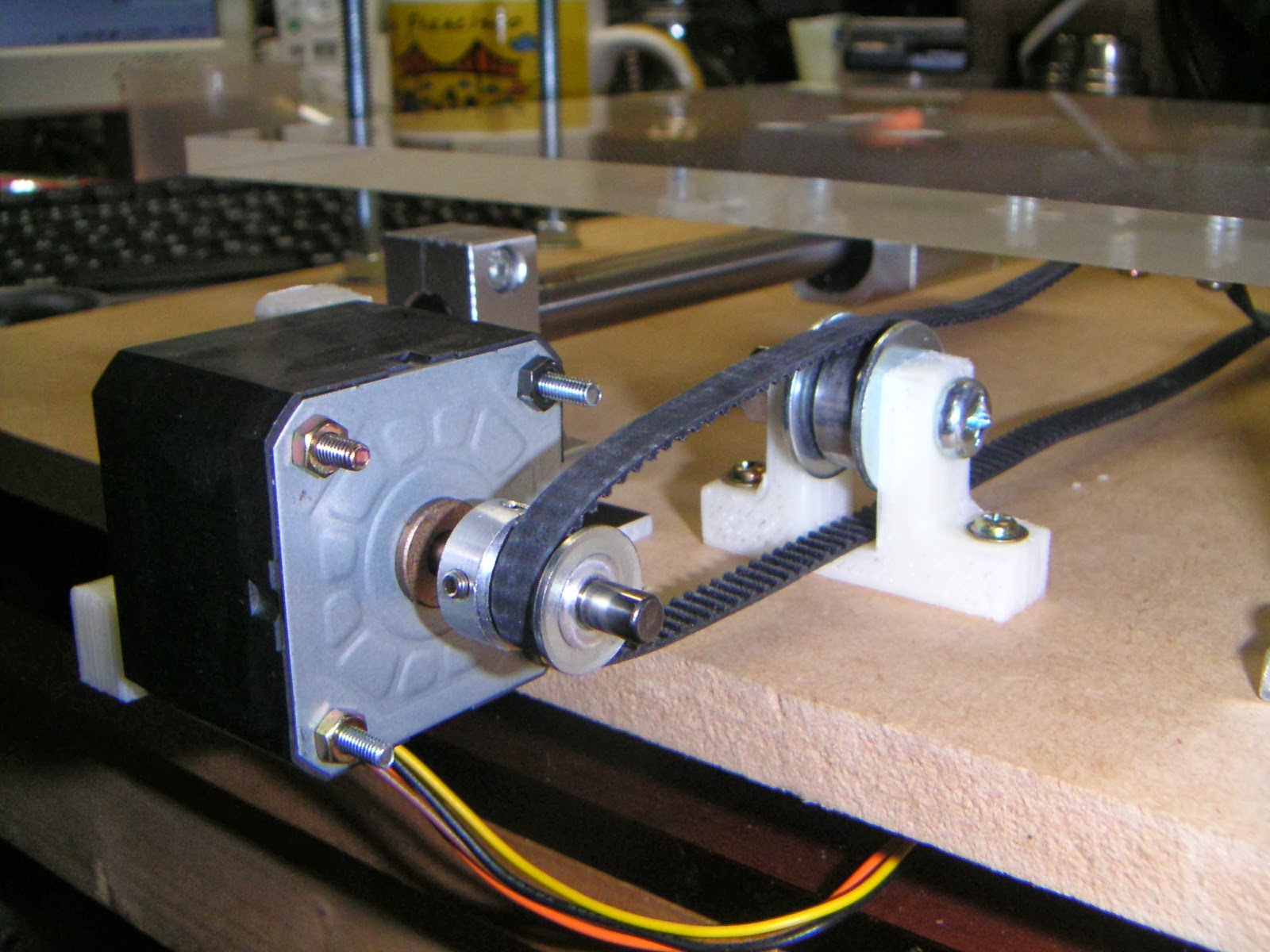
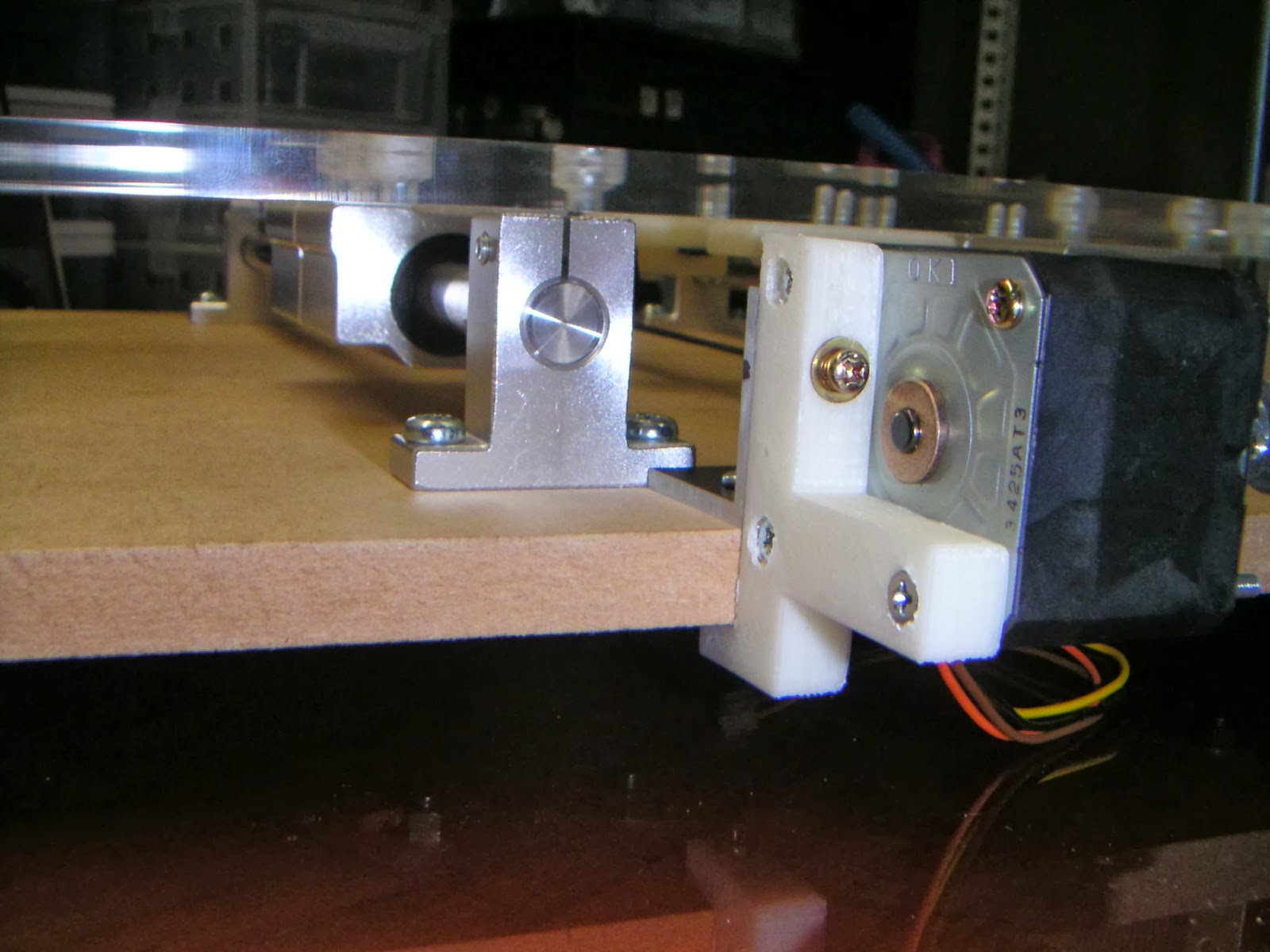
モータ部分はこのようにアルミのL材を利用して固定します。
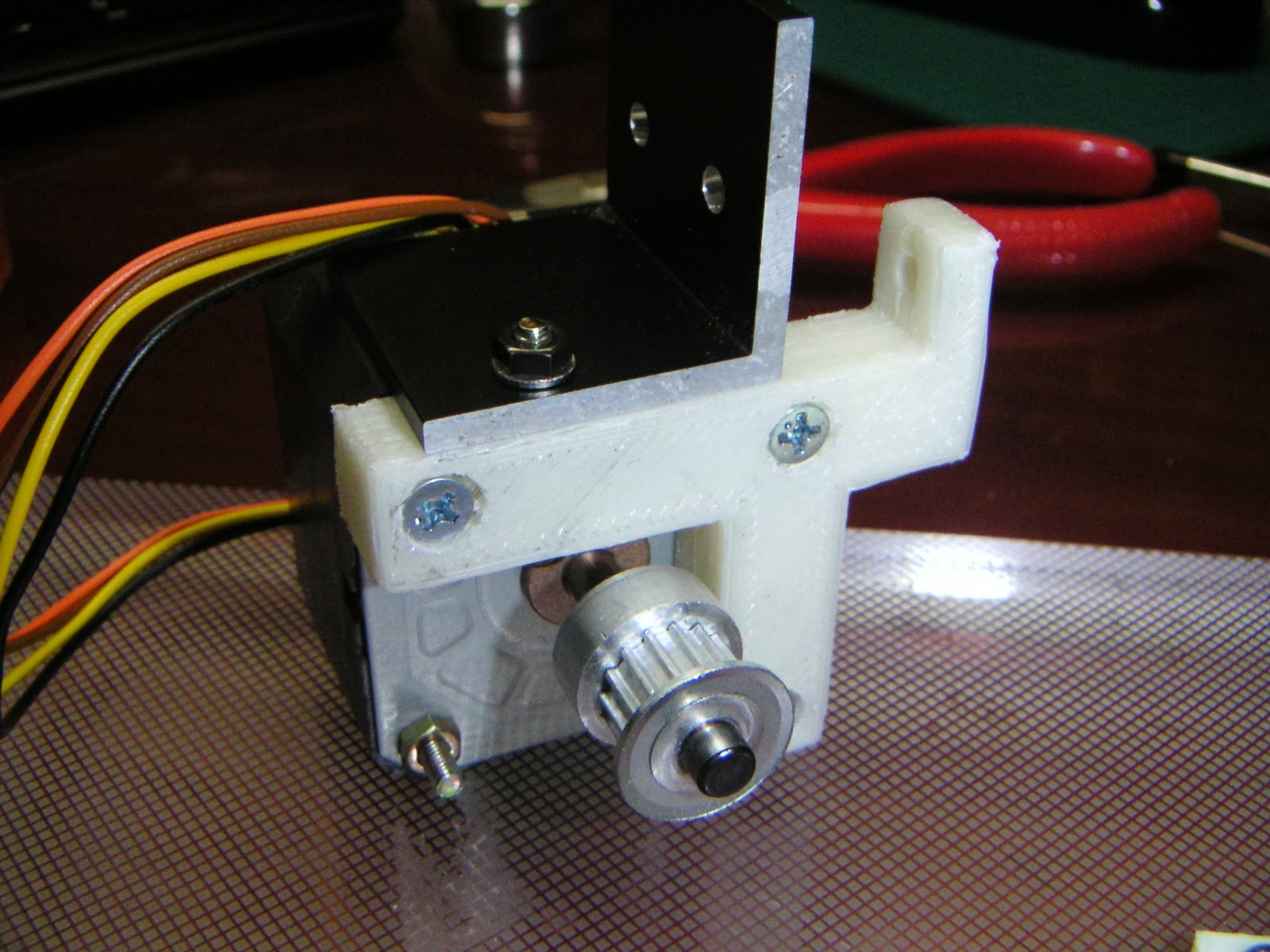
これはベルトのテンションを調整して締めこむときにドライバを差し込むための穴。

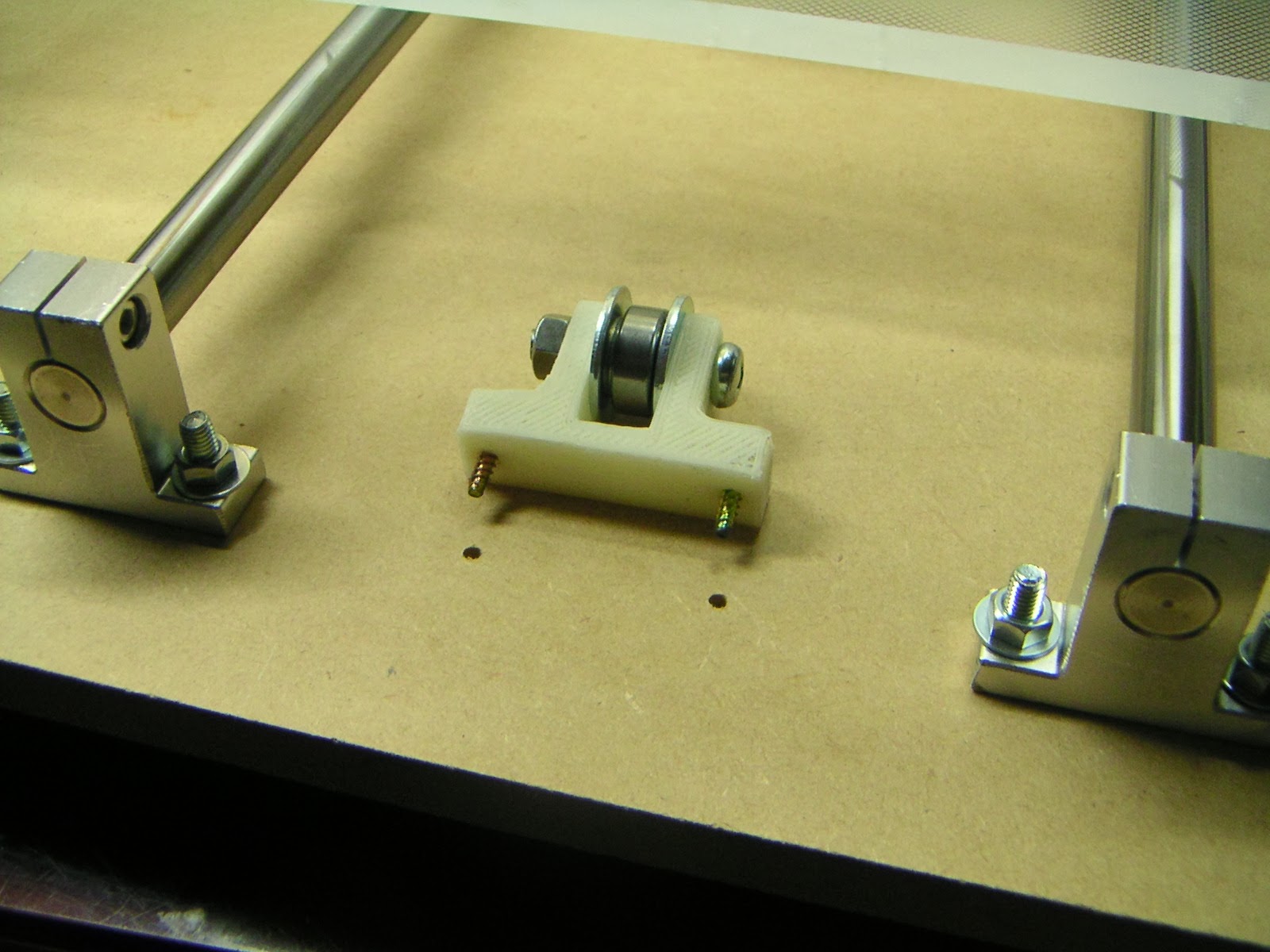
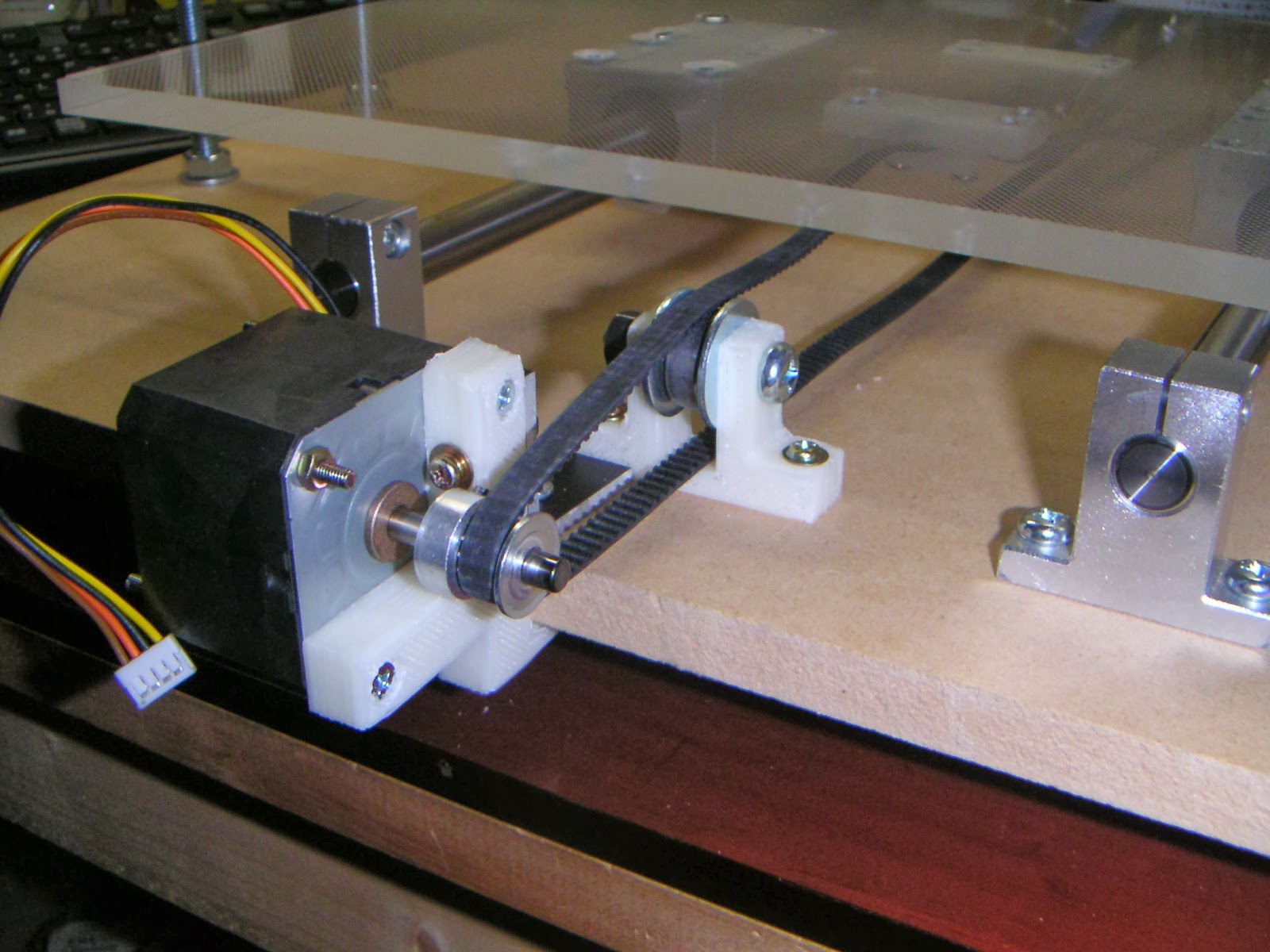
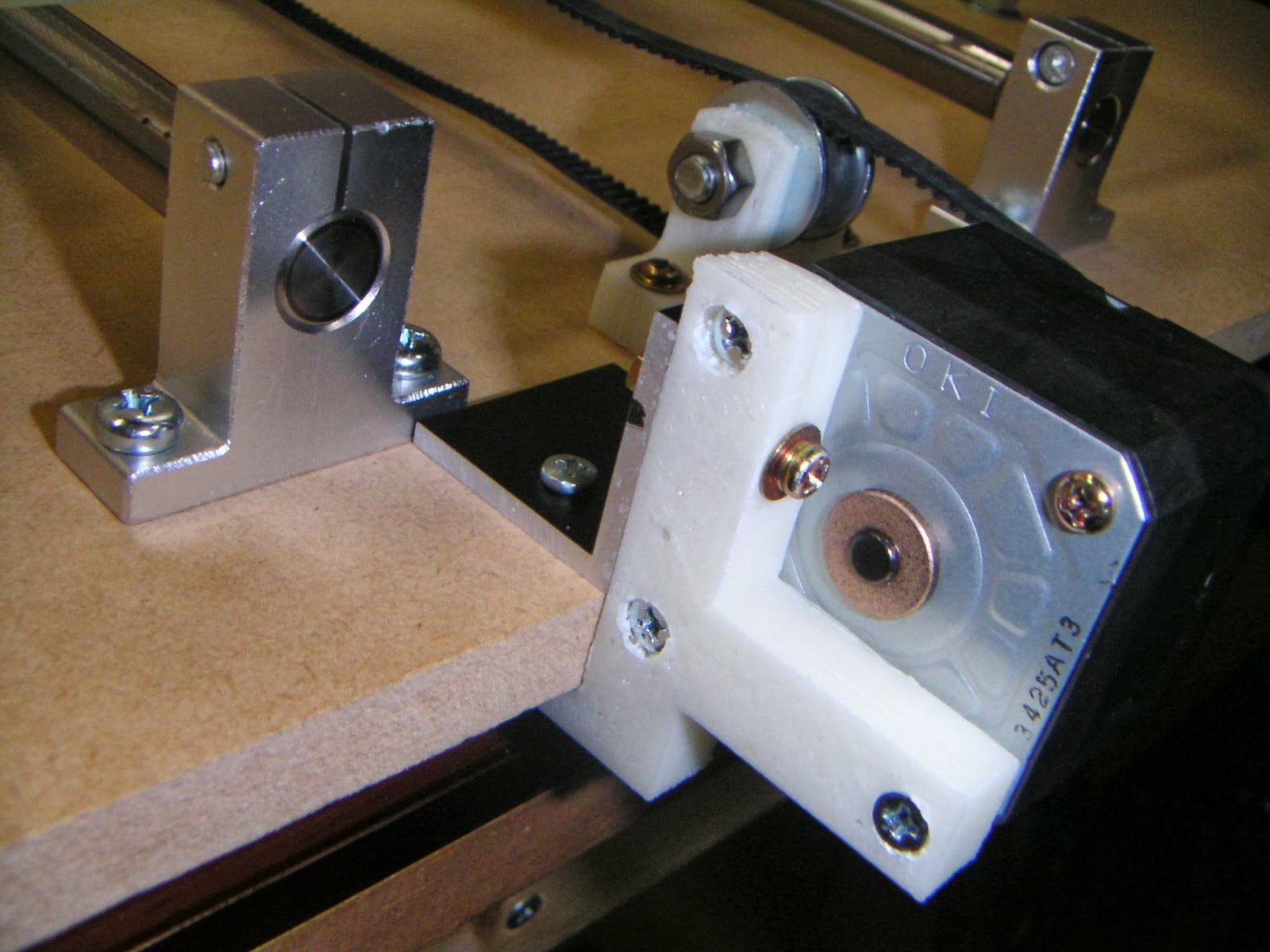
ベルトプーリーを作っていきます。パーツはこれら。ベアリング周りの構造はreprapの3Dプリンタに使われている物をそのまま流用しています。
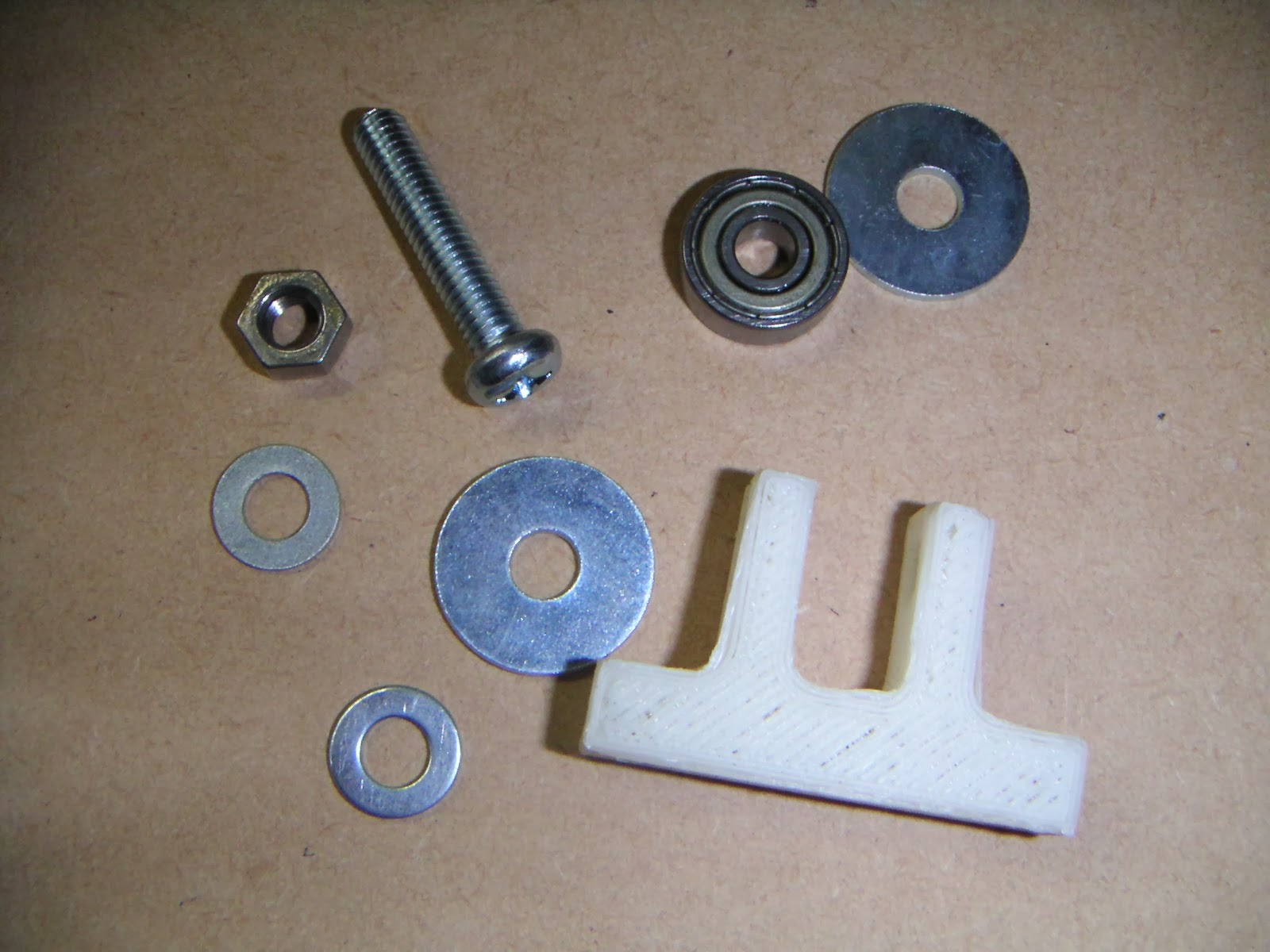
出来ました。ワッシャ大がベルトのはずれを防ぎ、ワッシャ小(見えません)がベアリングがスムースに回るようにワッシャ大との間に隙間を作ります。その全体をM6のボルトでプリントした台座に取り付けます。
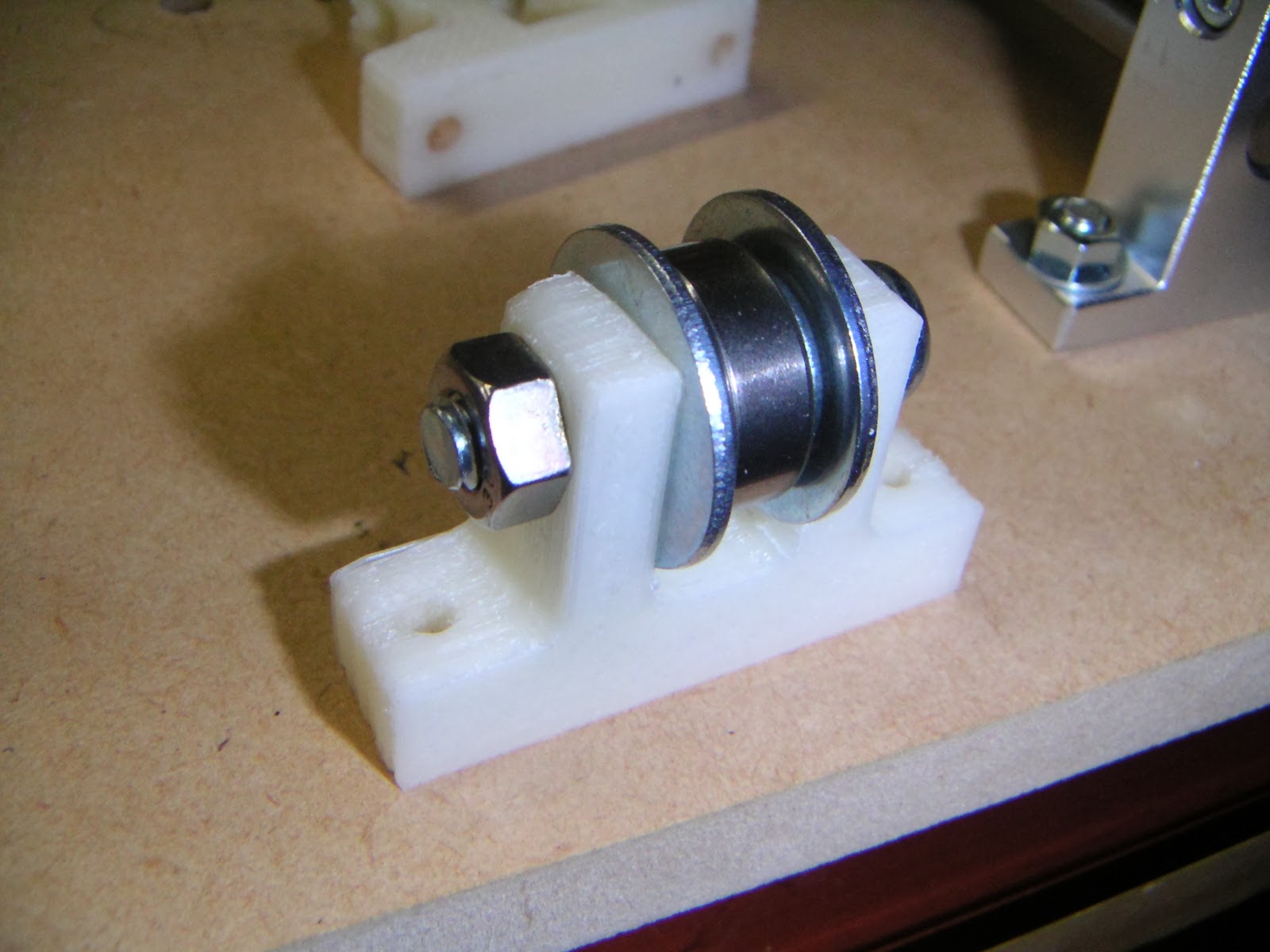
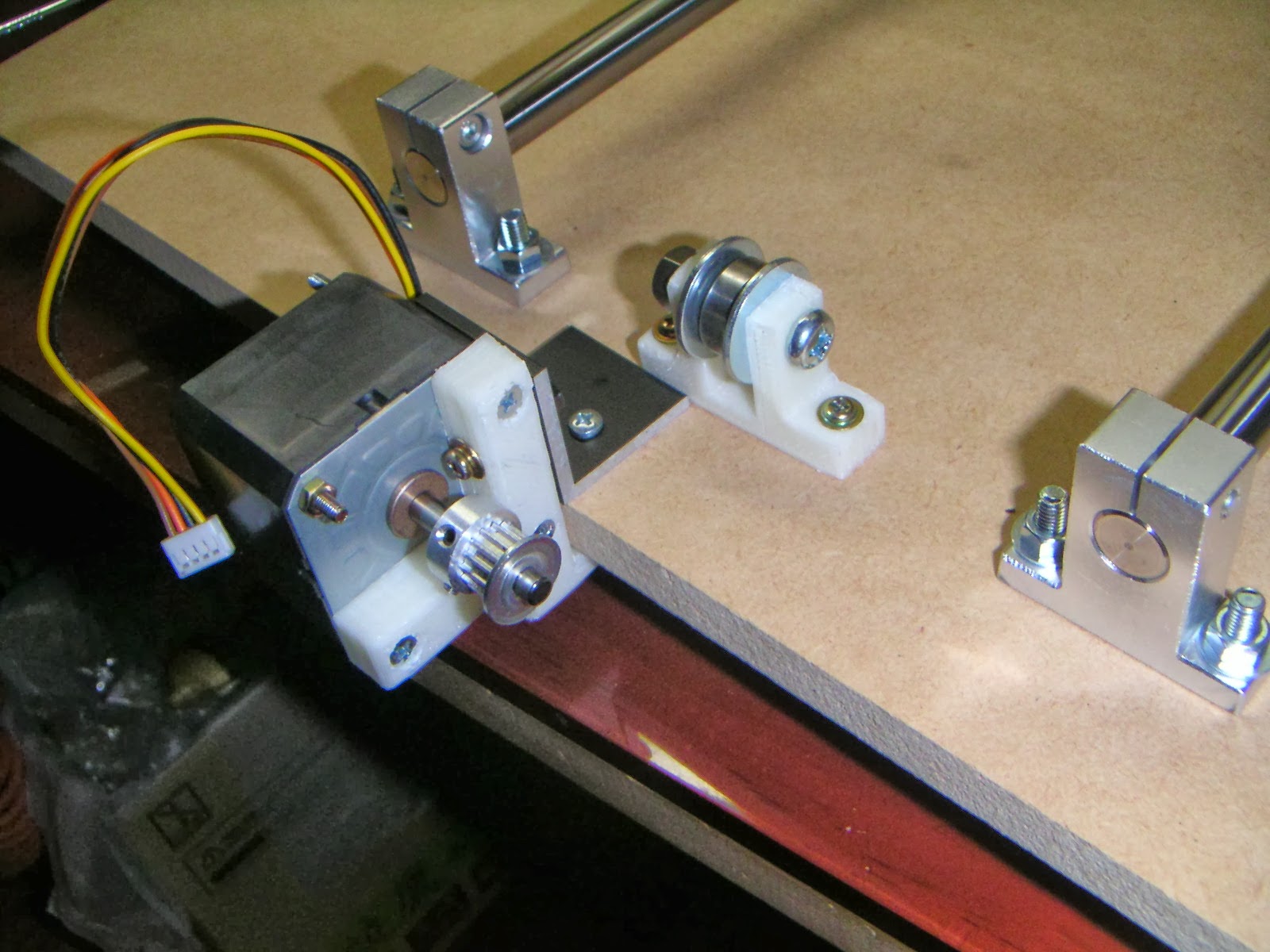
ベルトプーリーをねじ込みました。これはモータと反対側。
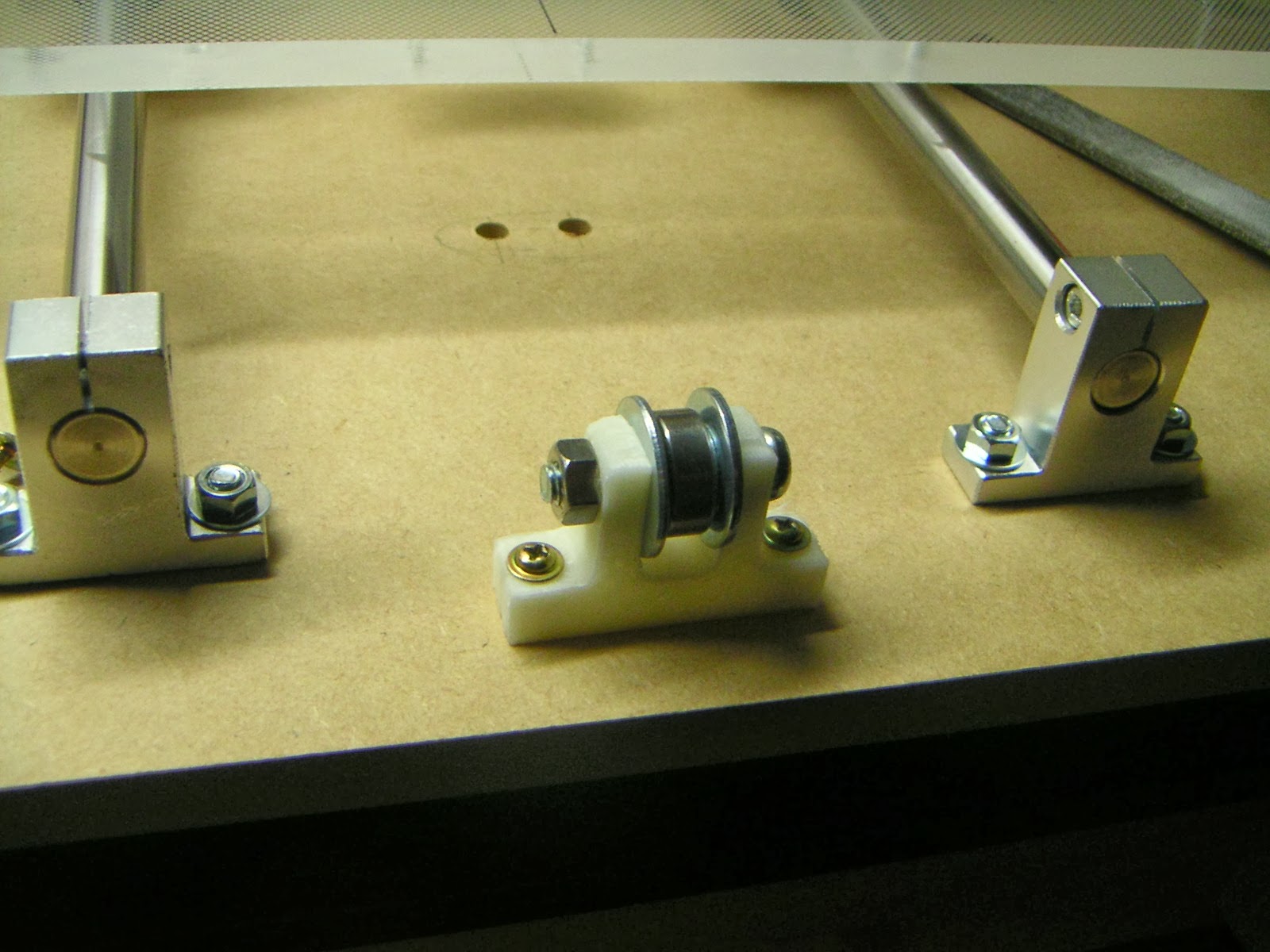
こちらはモータ側。ベルトプーリーの構造は同じ。台座はモータの位置が下がったのにあわせてベルトが引っかからないよう又の高さを下げています。
モータを取り付けました。
ベースの裏側もこのようにネジ止めします。
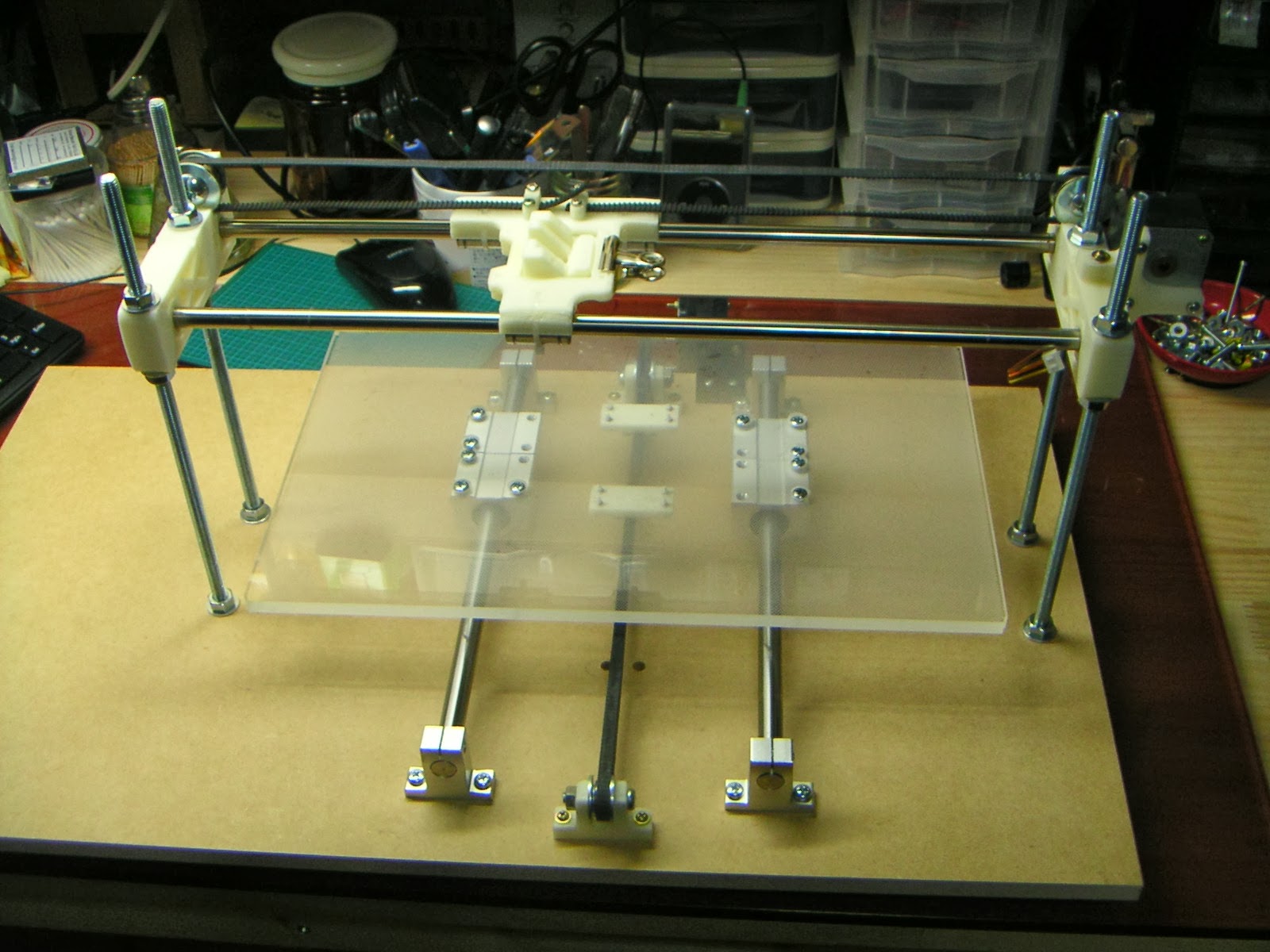
ベルトを掛けます。
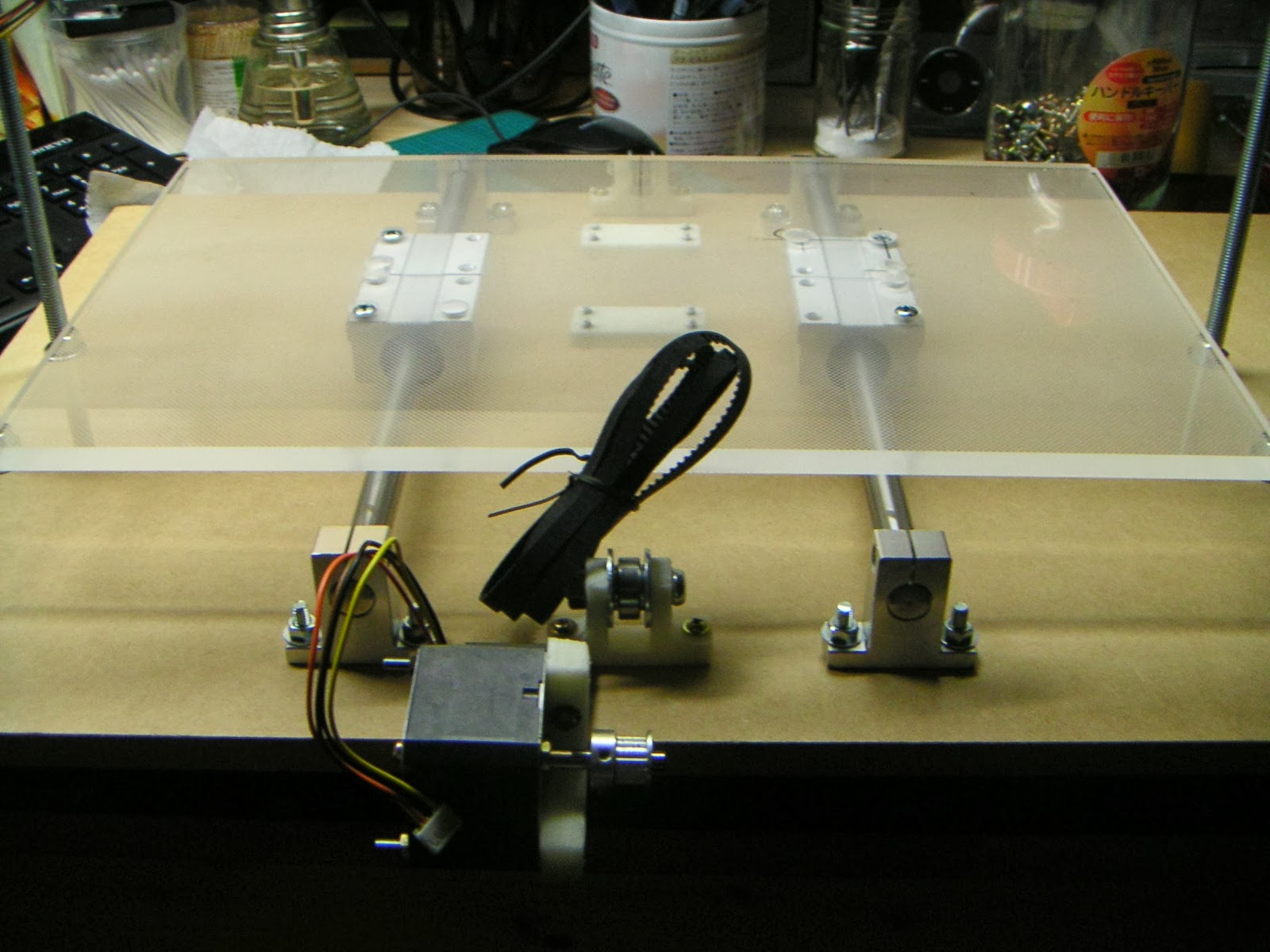
設計どおり干渉無く動くようです。一安心。
ということで、Y軸となるステージもほぼ完成しました。
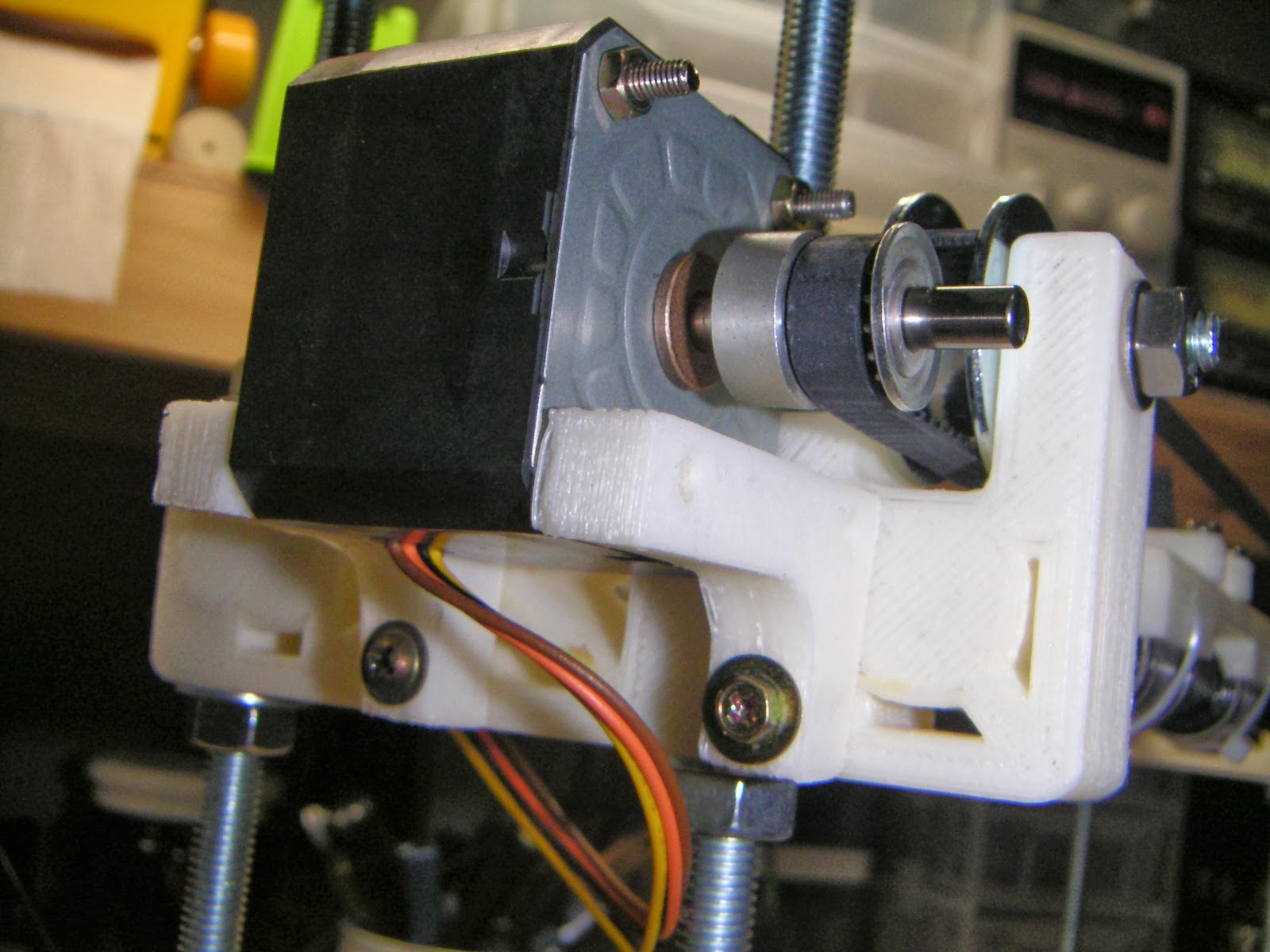
ここでモータの取り付けを変更しました。というのも、ベルトのテンションでモータの取り付けが若干曲がっているからです。下の写真のように設計時の構造はモータの出力軸側を保持する形でしたが、
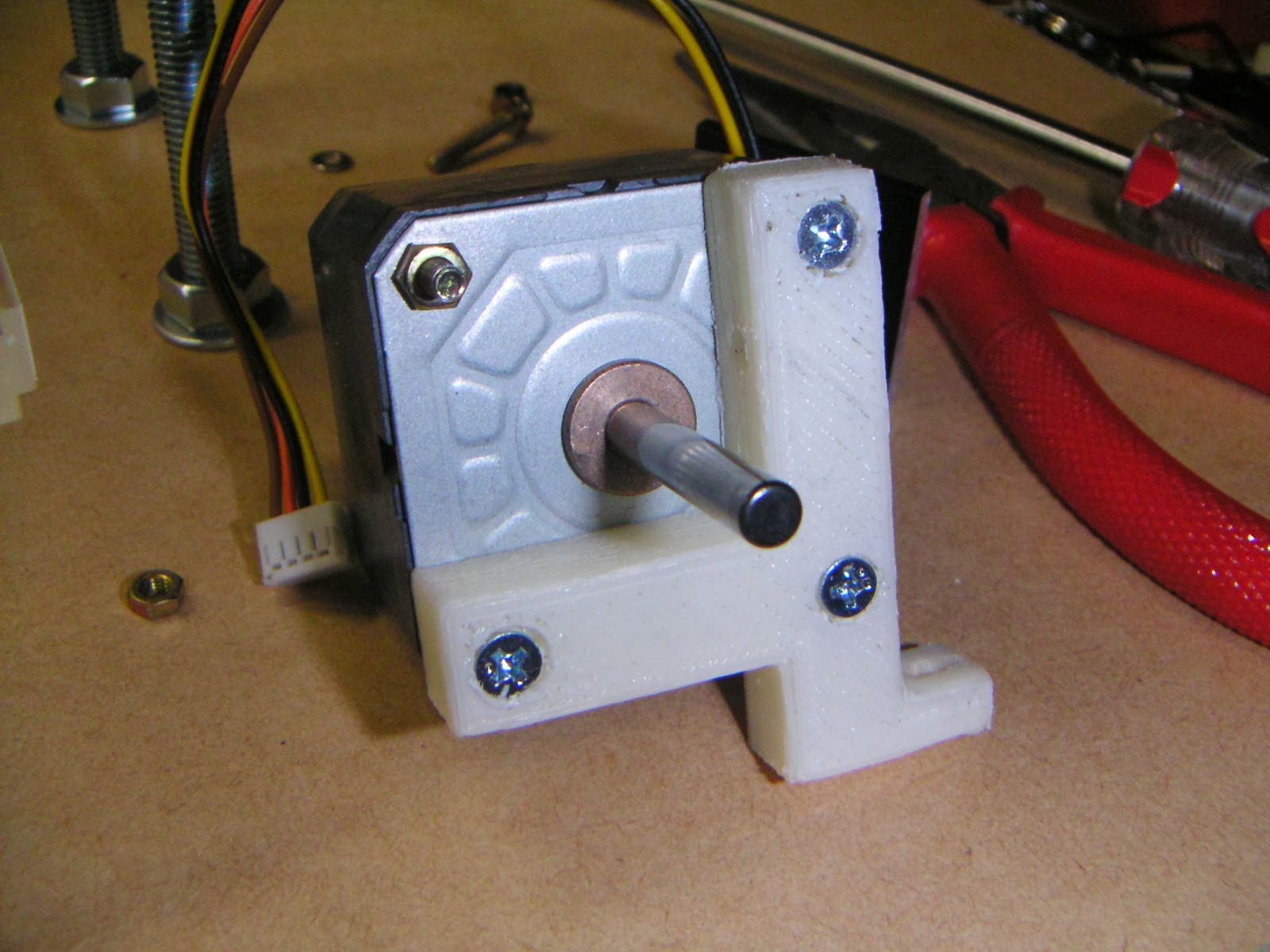
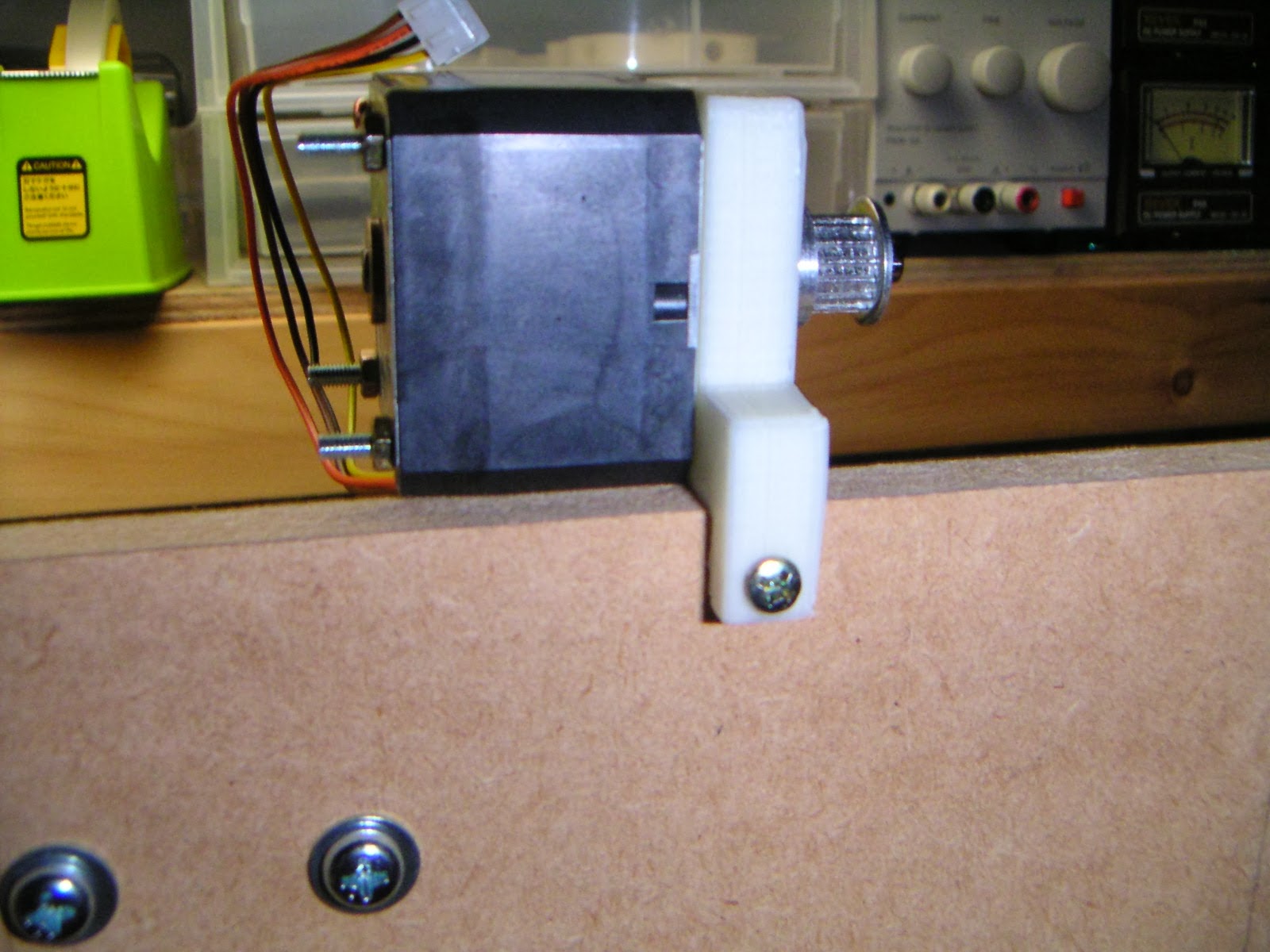
このようにお尻側を保持する事にしました。
こうすればベルトのテンションがかかってもモータがベースに押し付けられるだけなので曲がることもありません。がっちりと付いています。
後ろから見るとこんな具合になっています。
これで完成です。ステージもキャリッジも実にスムースに動きます。
ステージの下側。
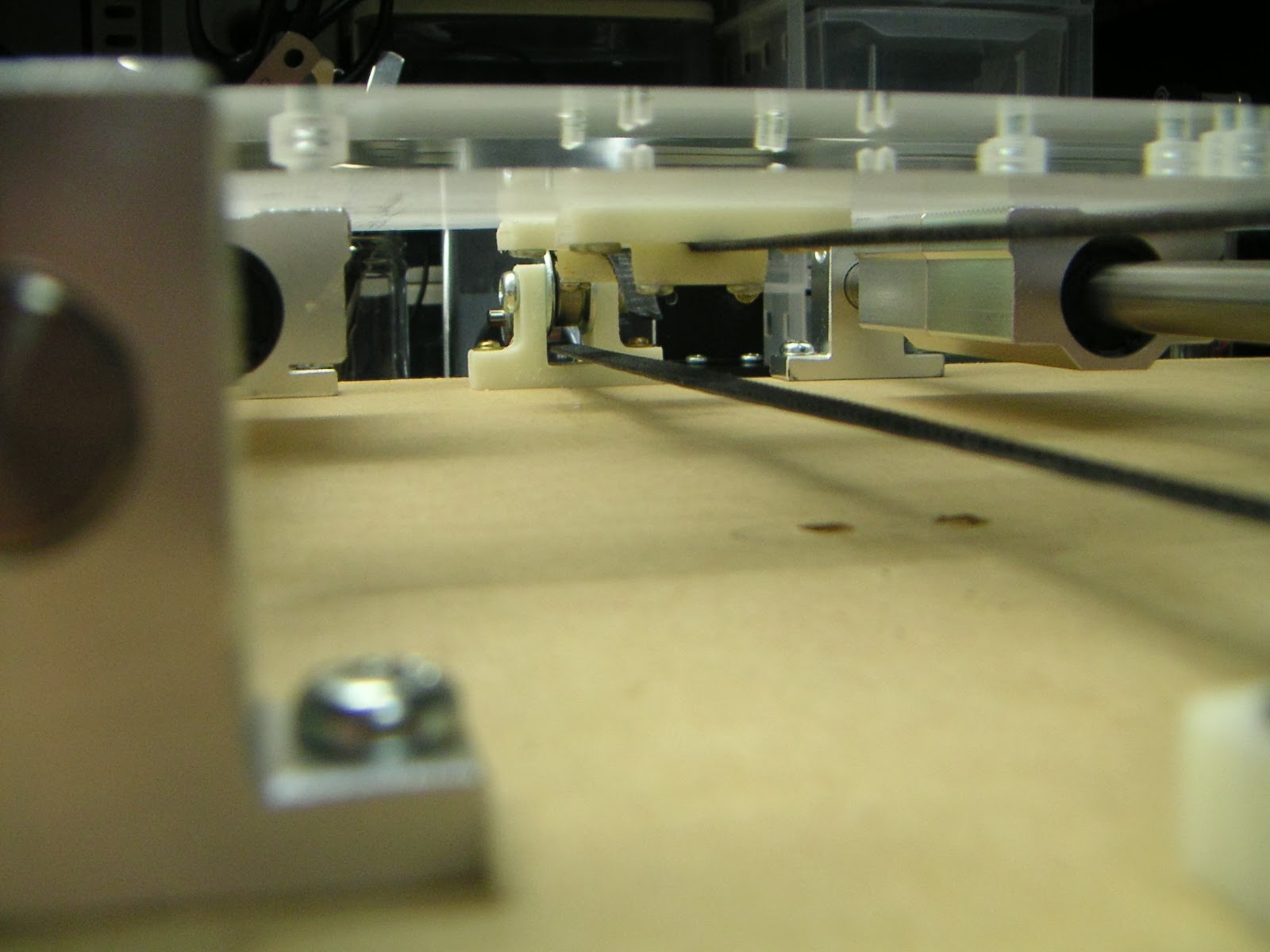
Y軸のベルト周り。
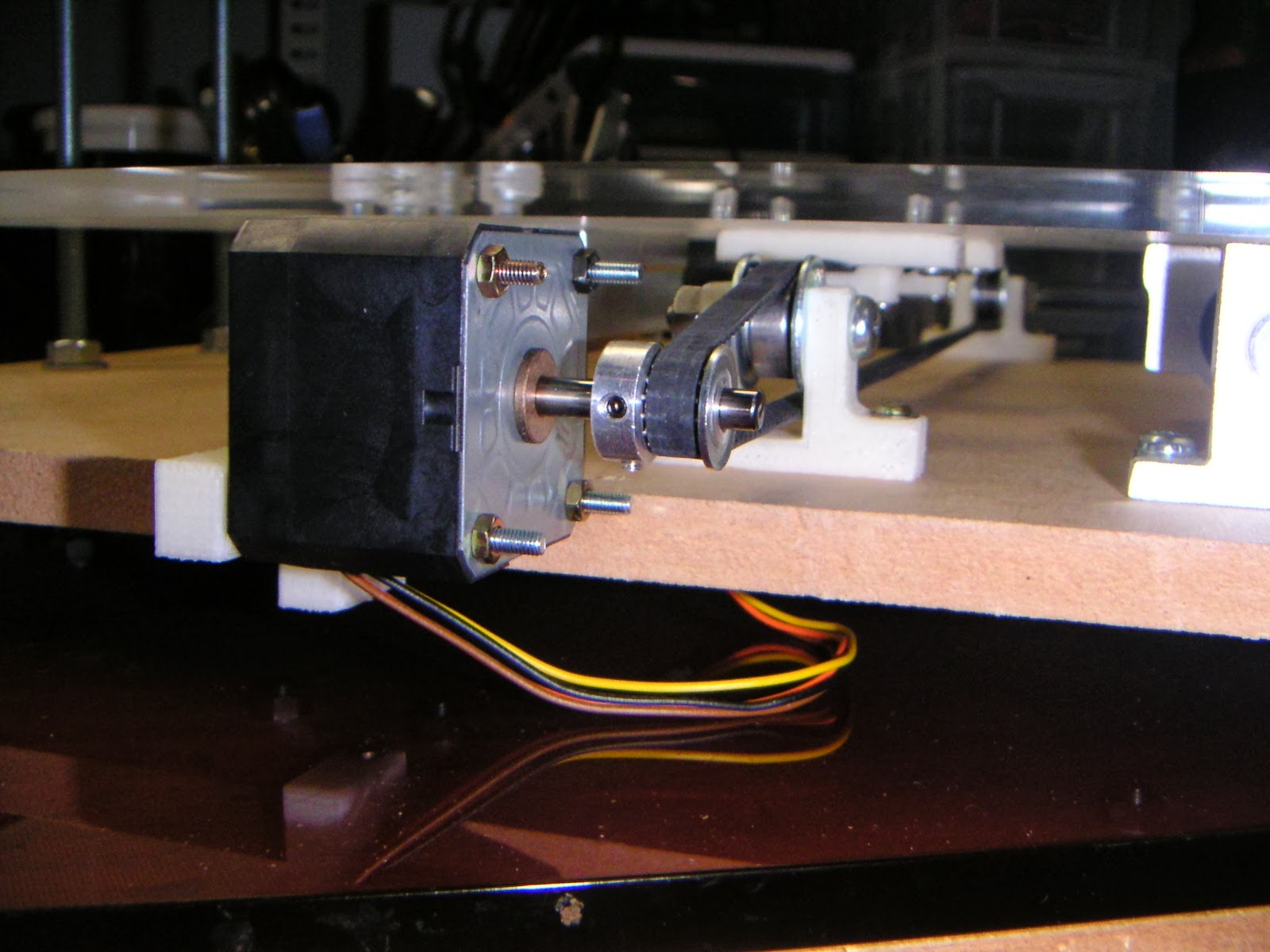
Y軸モータの保持。
キャリッジを乗せたX軸のモータのフロント側にステーを入れるのを忘れておりましたので、取り付けを行いました。
これで完全に出来上がりです。
明日はレーザ管の冷却実験とX/Y軸のモータ駆動の検討に着手します。
休みのうちには動くかな。