
基本的なイルミネーションの動作はできましたので、制御系をブレッドボードから基板に実装していきます。
最終的に操作パネルを含めてシートの背面のこの位置に取り付ける予定です。おおよそのサイズを測って基板サイズを決めます。

使いそうな部品を集めてきます。
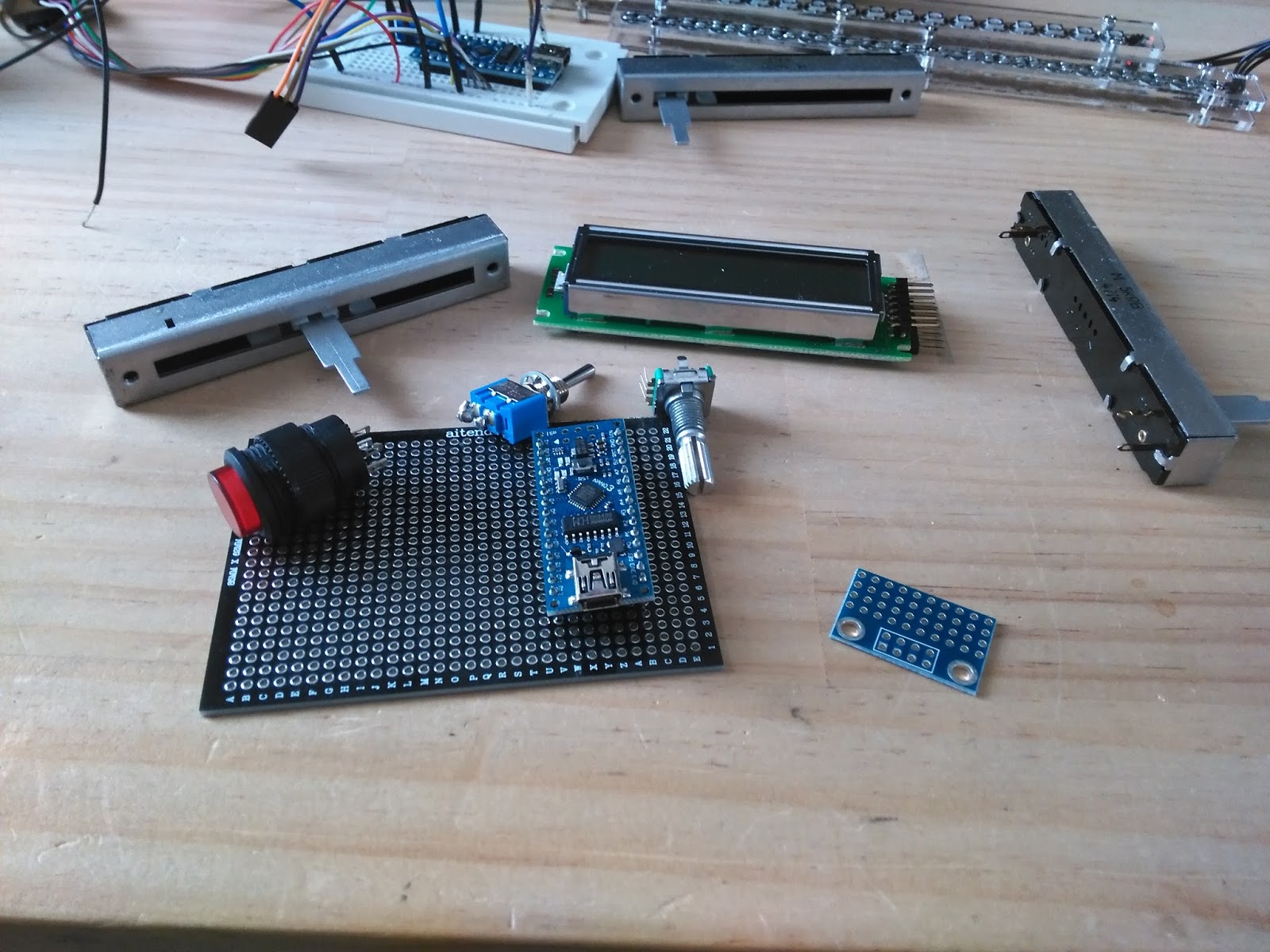
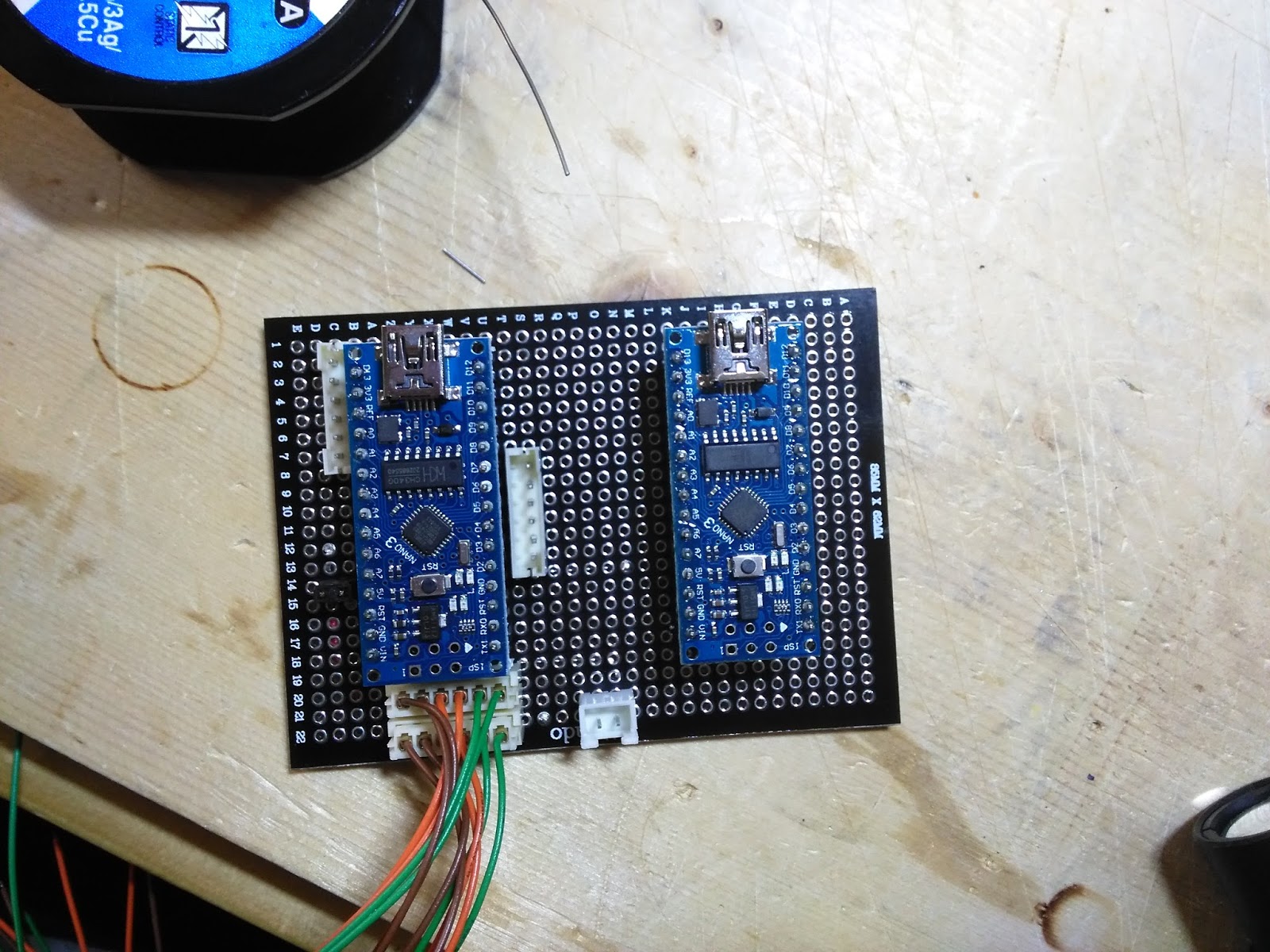
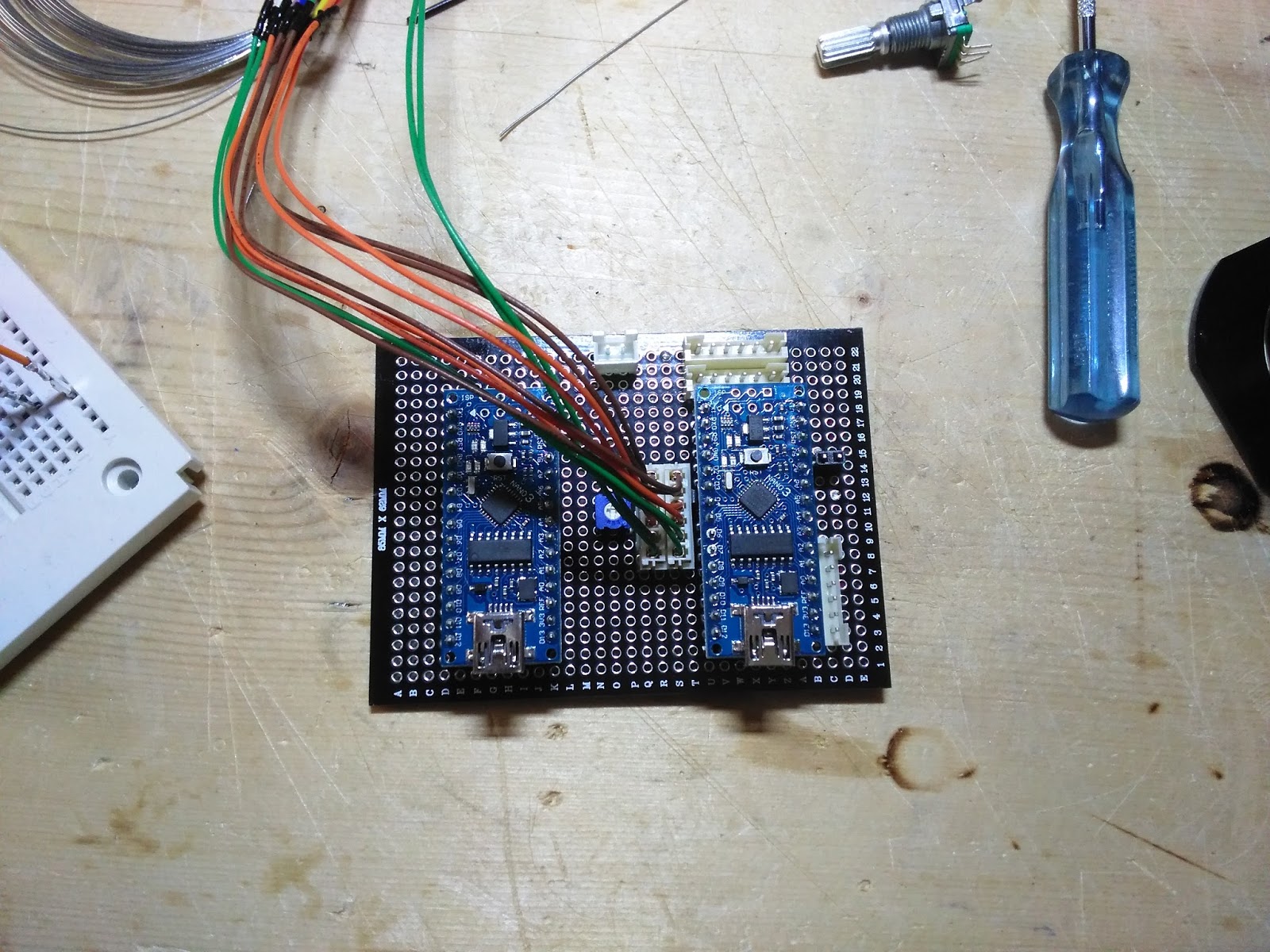
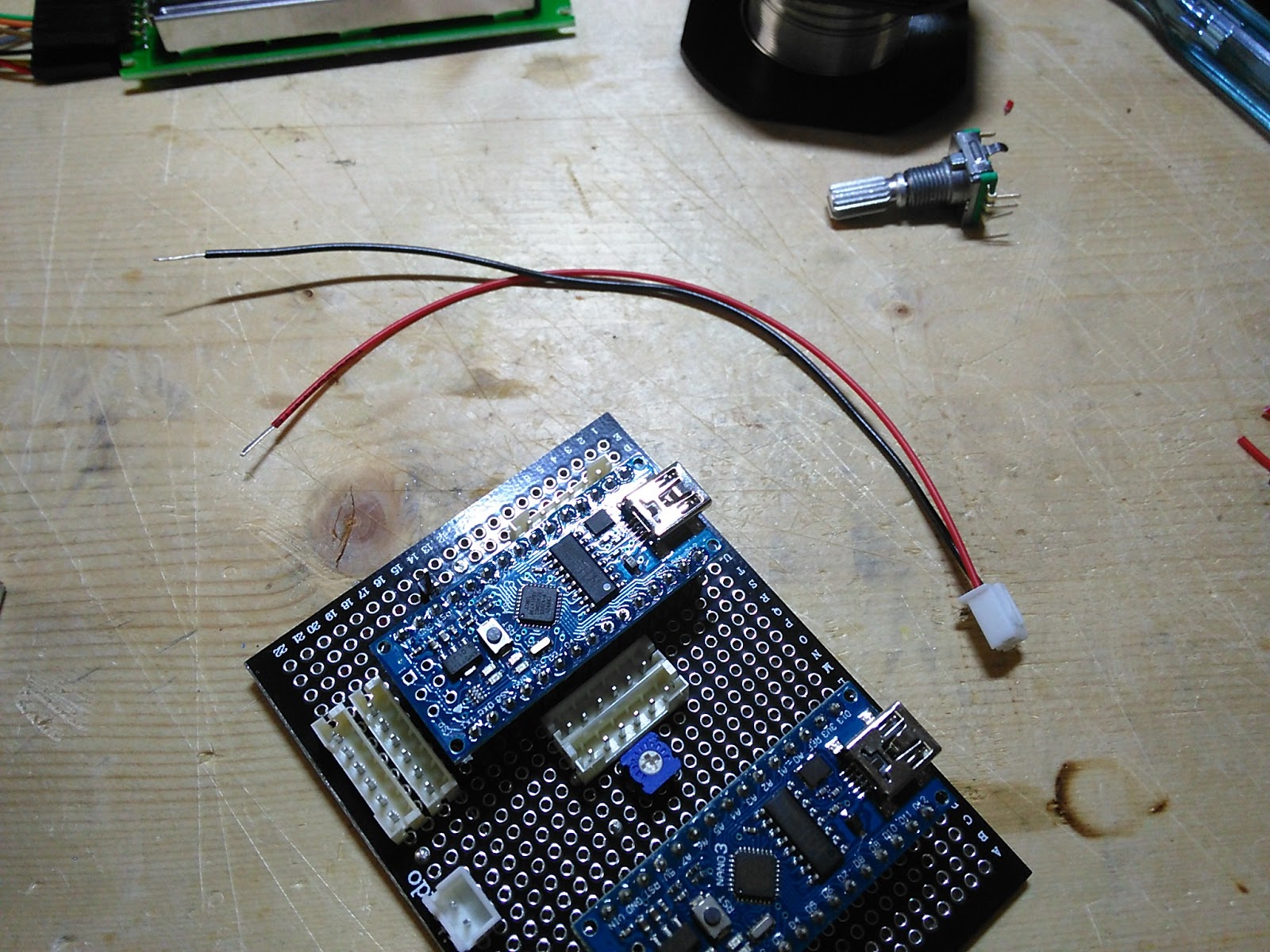
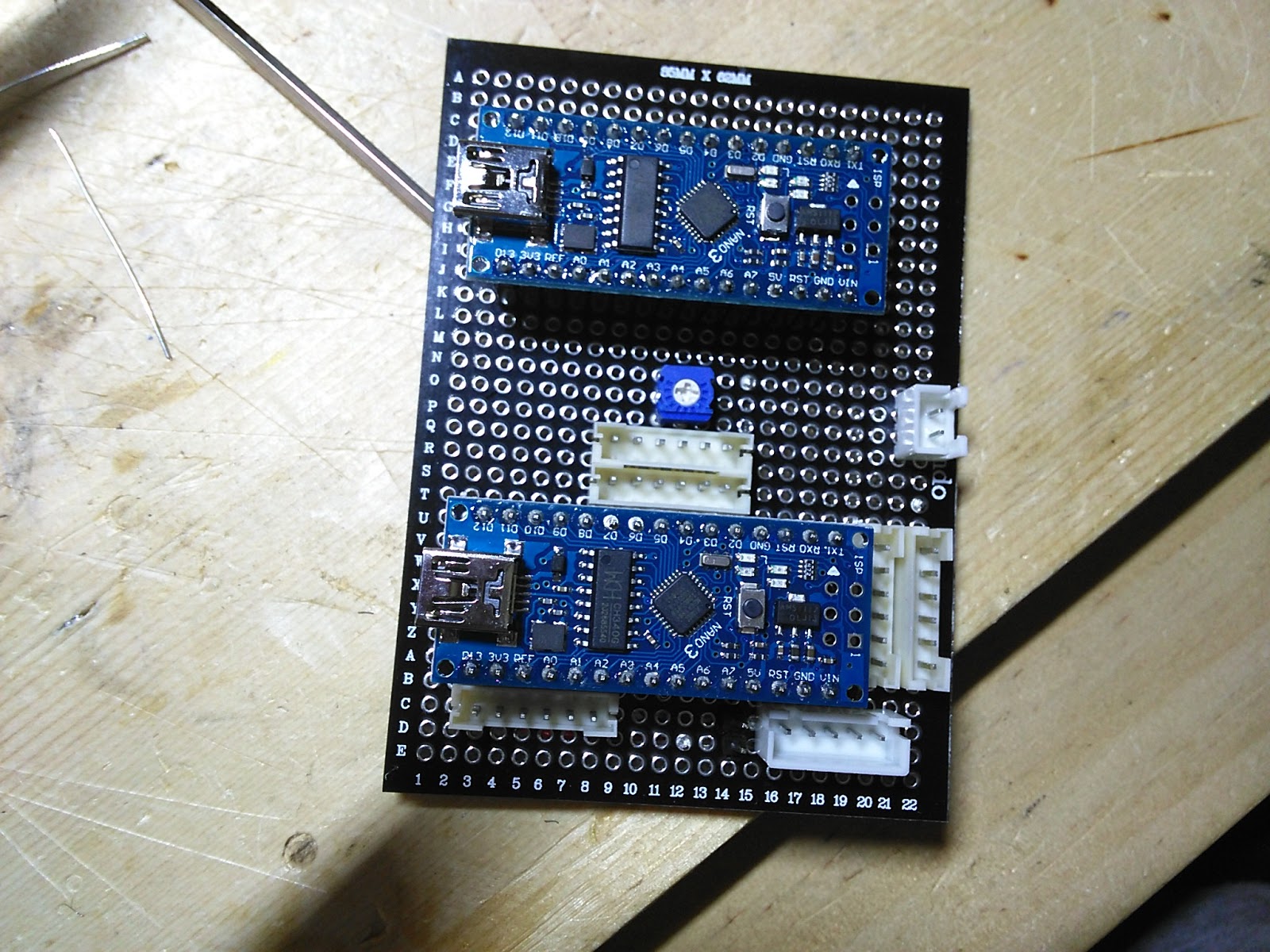
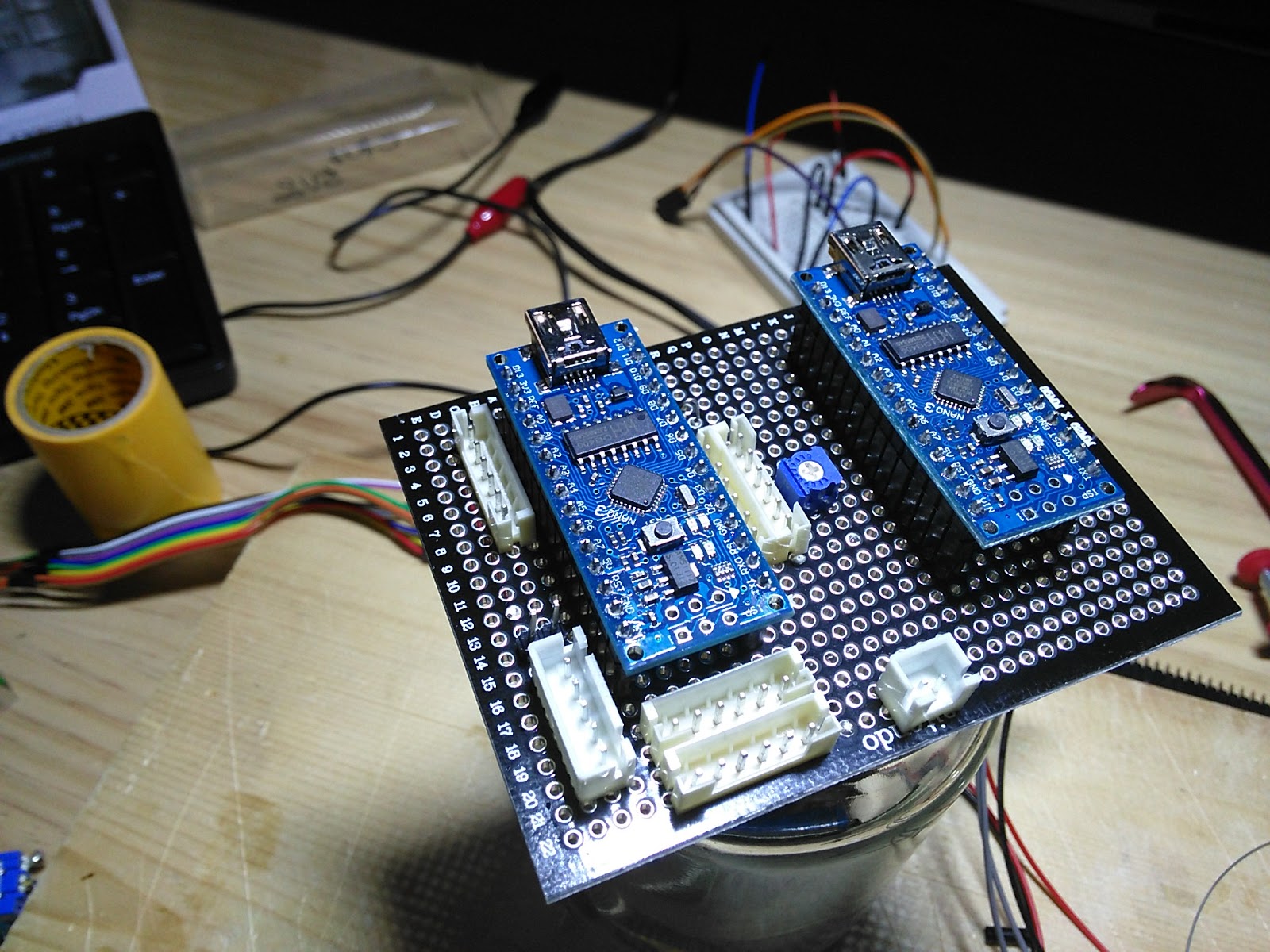
制御はサイドバーとUVクリアリングで一つ、その他のイルミネーションで一つArduino nanoを使う予定です。基板上の位置をおおよそ決めます。
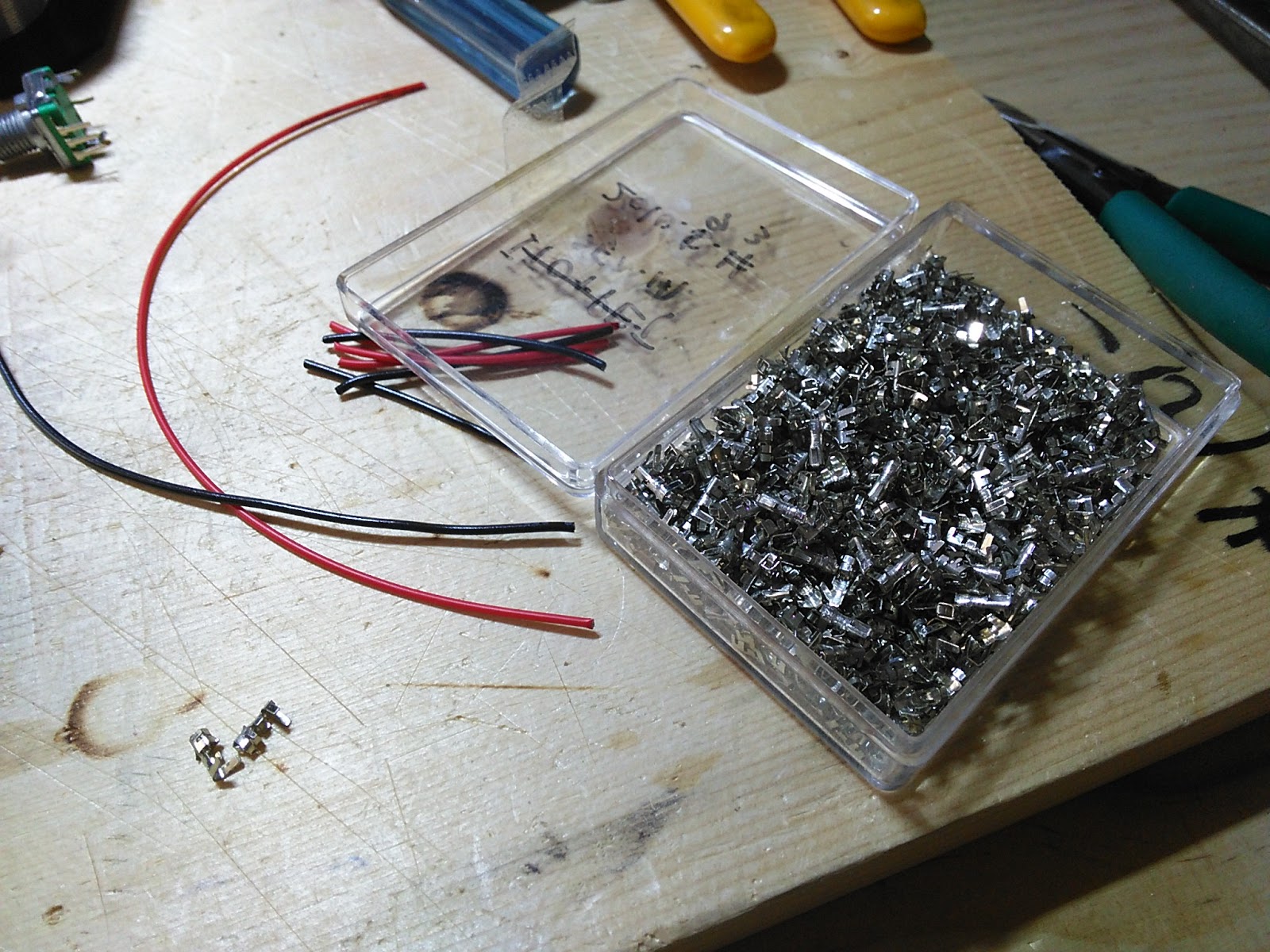
コネクタは若松の末広町ビルが閉まるときに買ったこの大量のセットをメインに使います。

2.54mmピッチ、6Pで縦型ポストとハウジング、100mmほどのハーネスがセットになったものが10組入って一袋10円でした(笑
40袋買いましたので、400ペアあります。一生使えそうな量です。

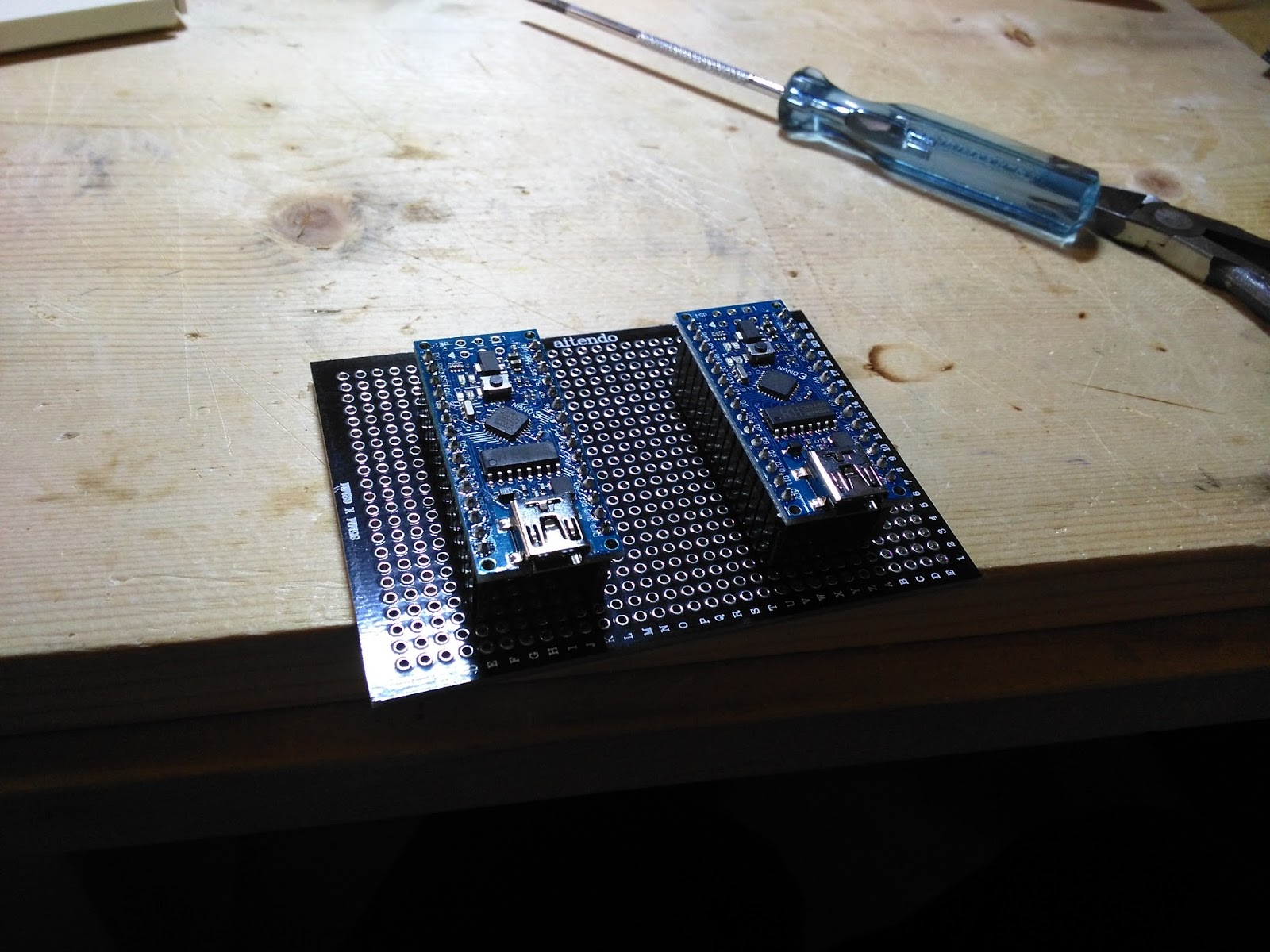
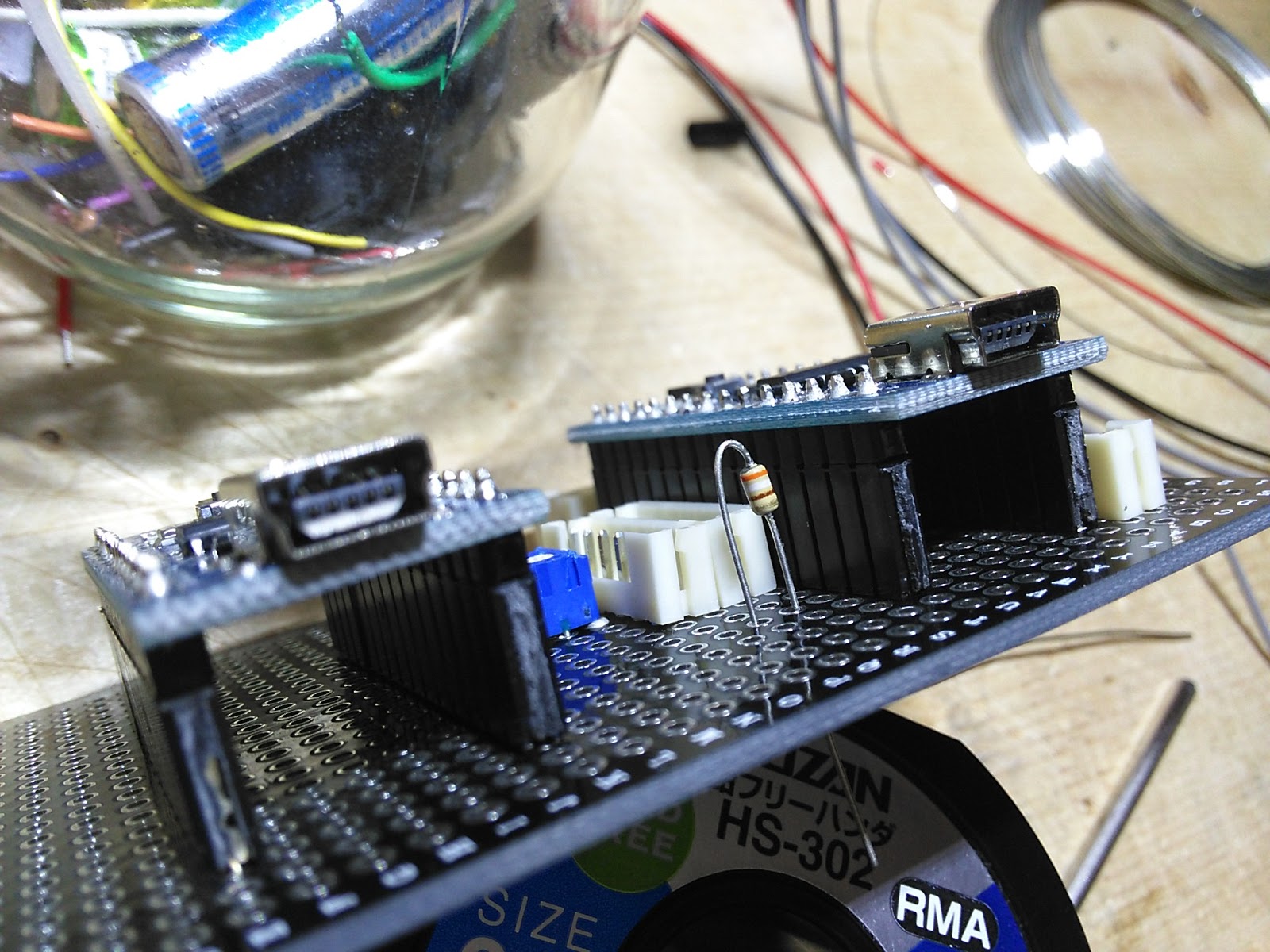
Arduinoはピンソケットに挿す形で実装します。すぐに壊すので交換可能にしておきたいのです。
例によって実装図面を描くこともなく、行き当たりばったり&これまでの経験失敗で鍛えられた鋭いカンで実装を進めます。
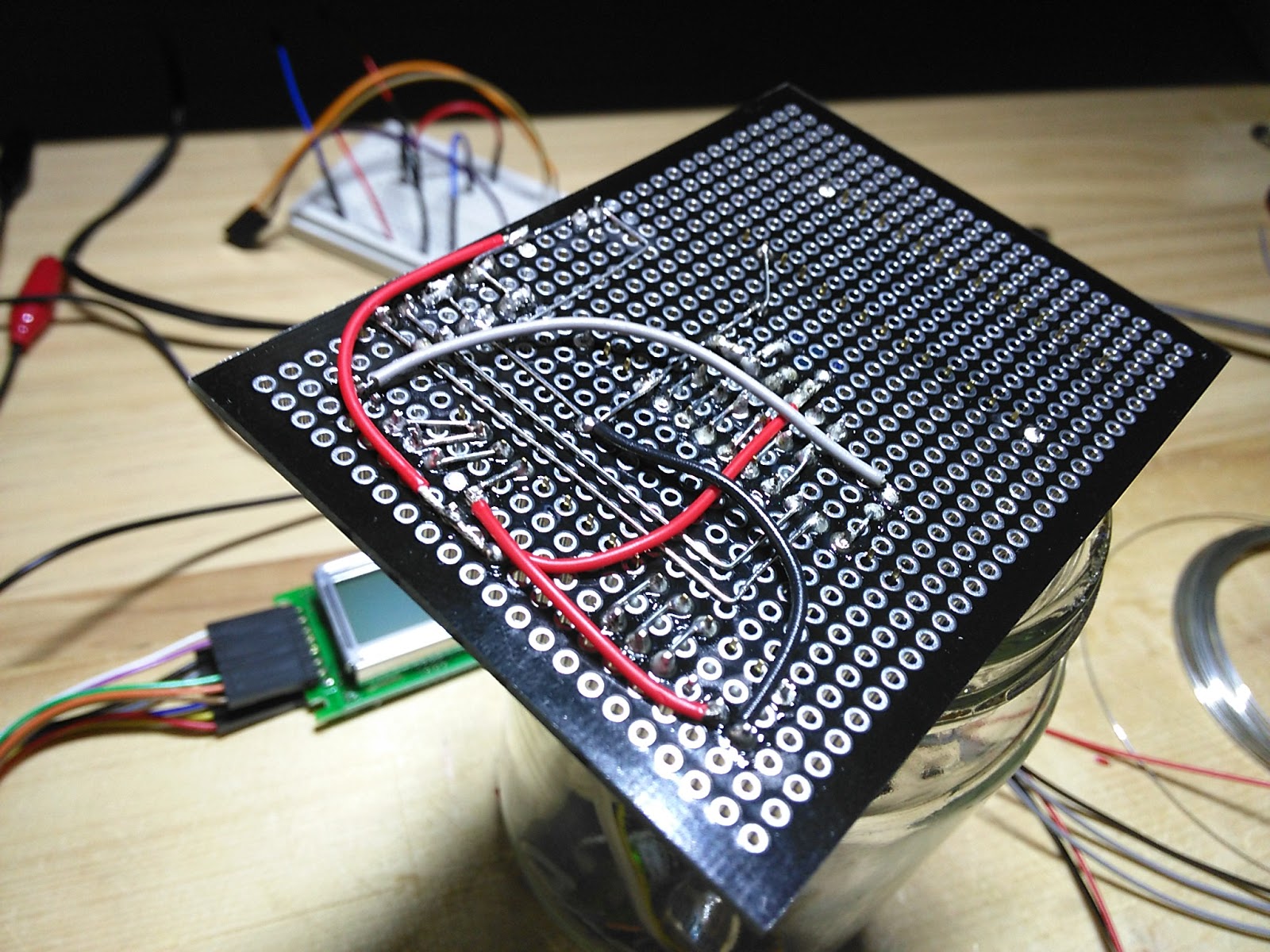
ユニバーサル基板の裏面には製作者の性格だけでなく、生き様、哲学、思想信条までもが現れるのであります(笑
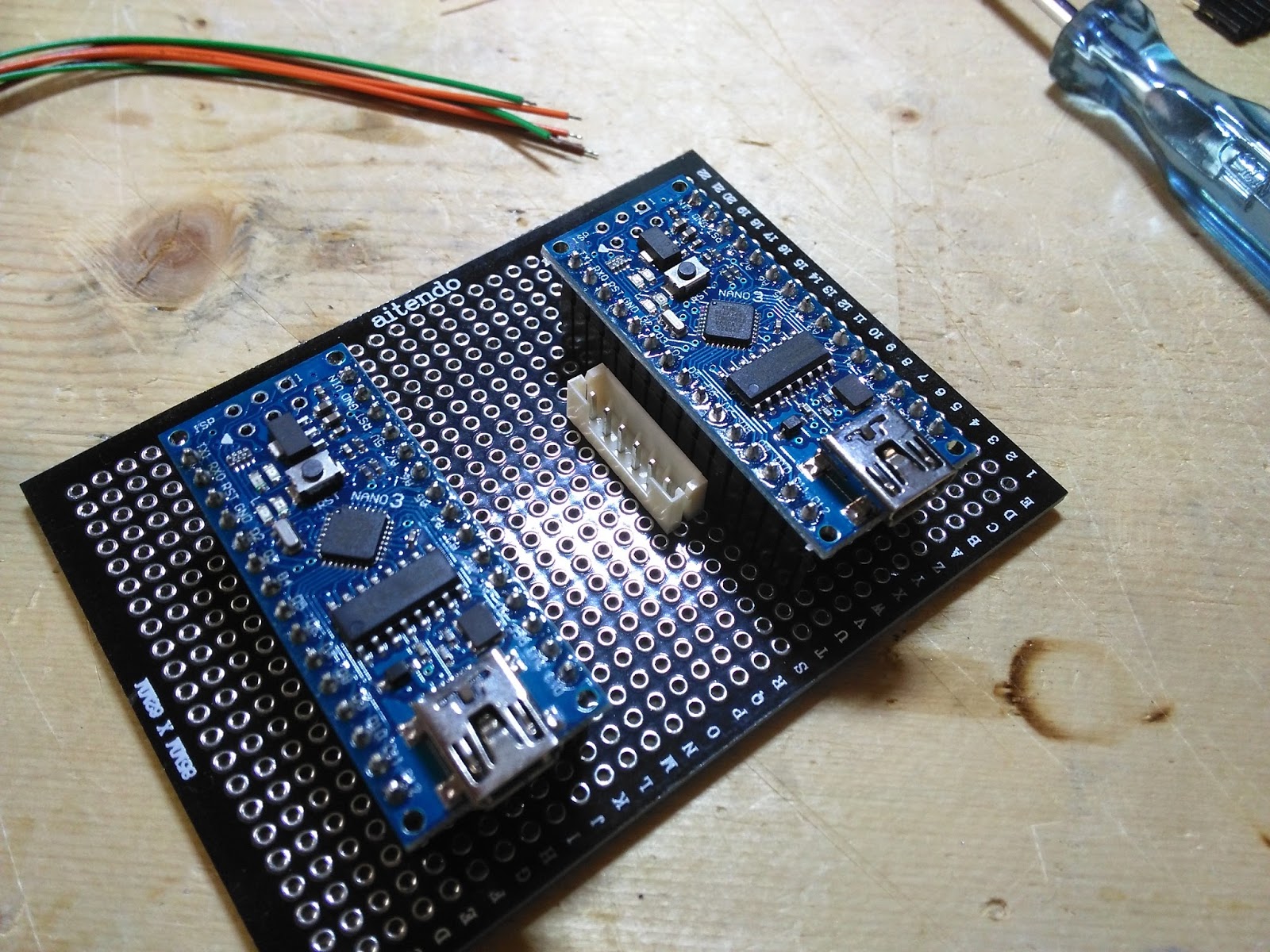
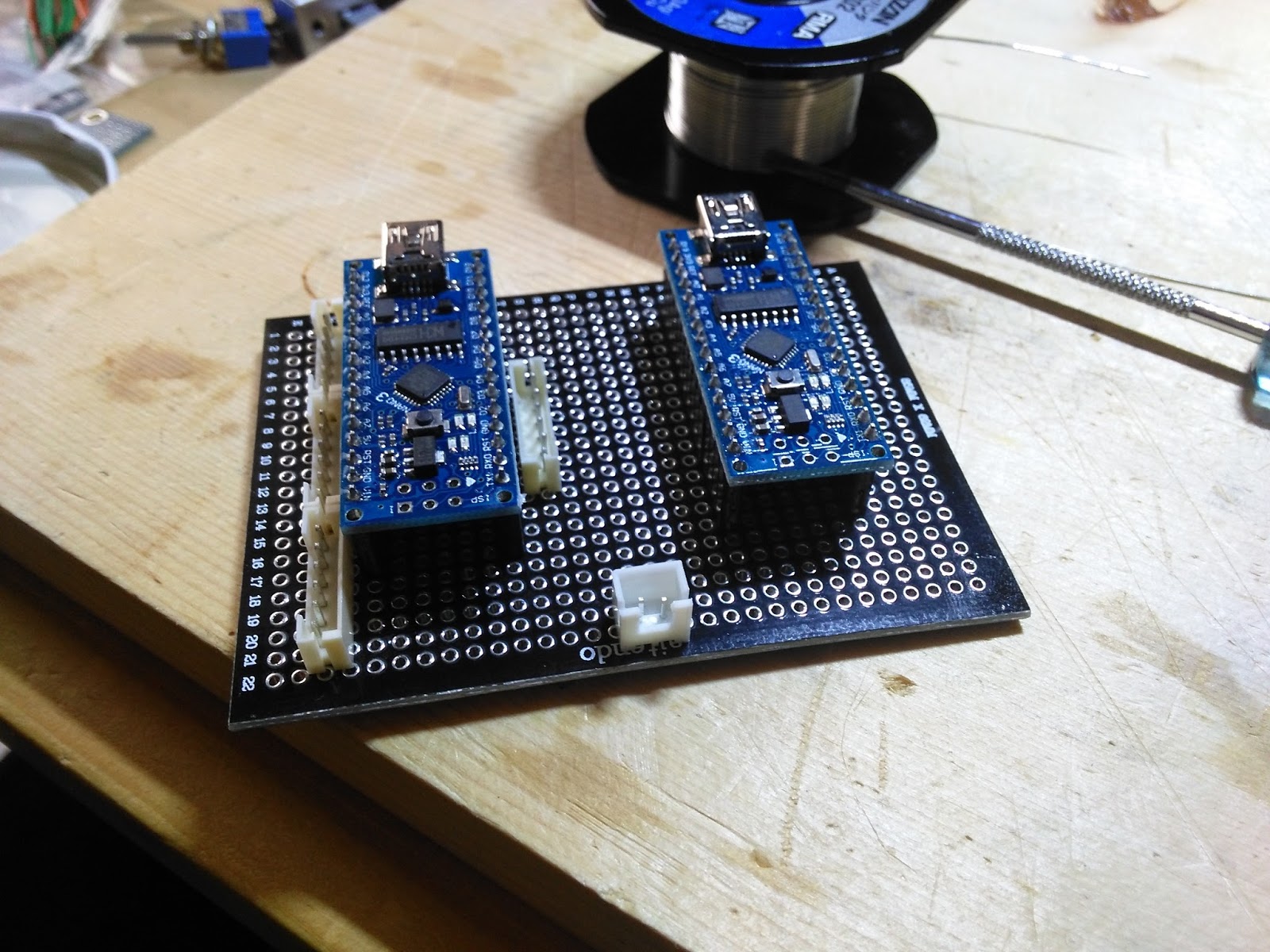
左をサイドバーとUVクリアリングの制御に使います。右側はまだどう使うか考えておりませんので、コネクタ等も載せておりません。
信号系を終了し、電源周りの配線に入ります。
LCDへ延ばすケーブルはフラットケーブルと若松ハーネスを繋いで使います。本数が多いので散らからないようにするのと、結線を間違えないようにするためです。
LCD側端はQiコネクタのメスをつけたままです。

LCD引き出し部分出来ました。
サイドバーとUVクリアリングのLEDは左右それぞれひとつずつのコネクタにまとめます。
すっきり ……でもないか。

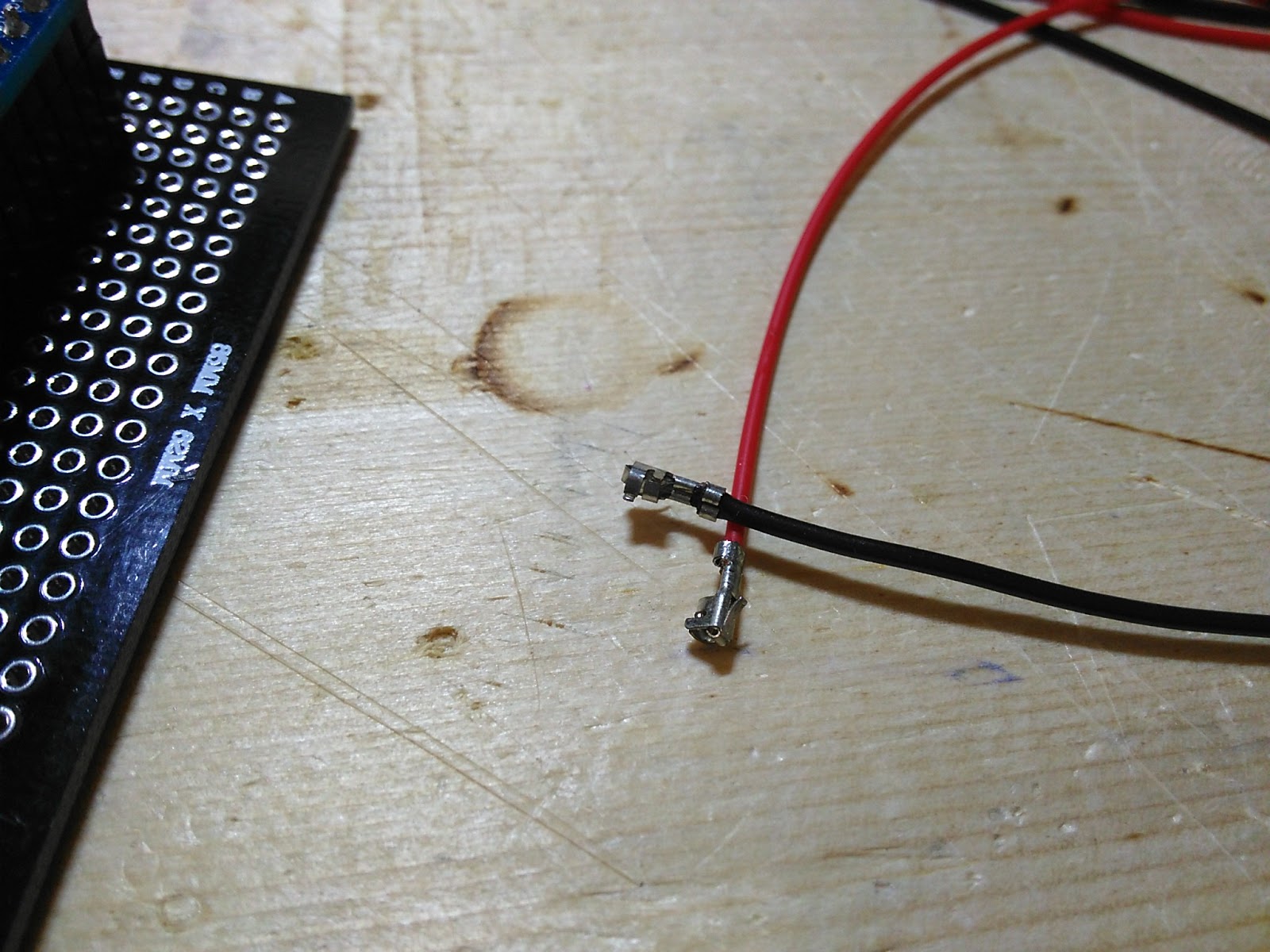
電源引き出しはXHコネクタの2Pを使います。ここで楽しいコネクタ作りの時間です。
コネクタカシメ工具登場。役に立っております。が、どうしても作業に違和感があります。以前も投稿に書きましたが、ダイが逆についているようなのです。
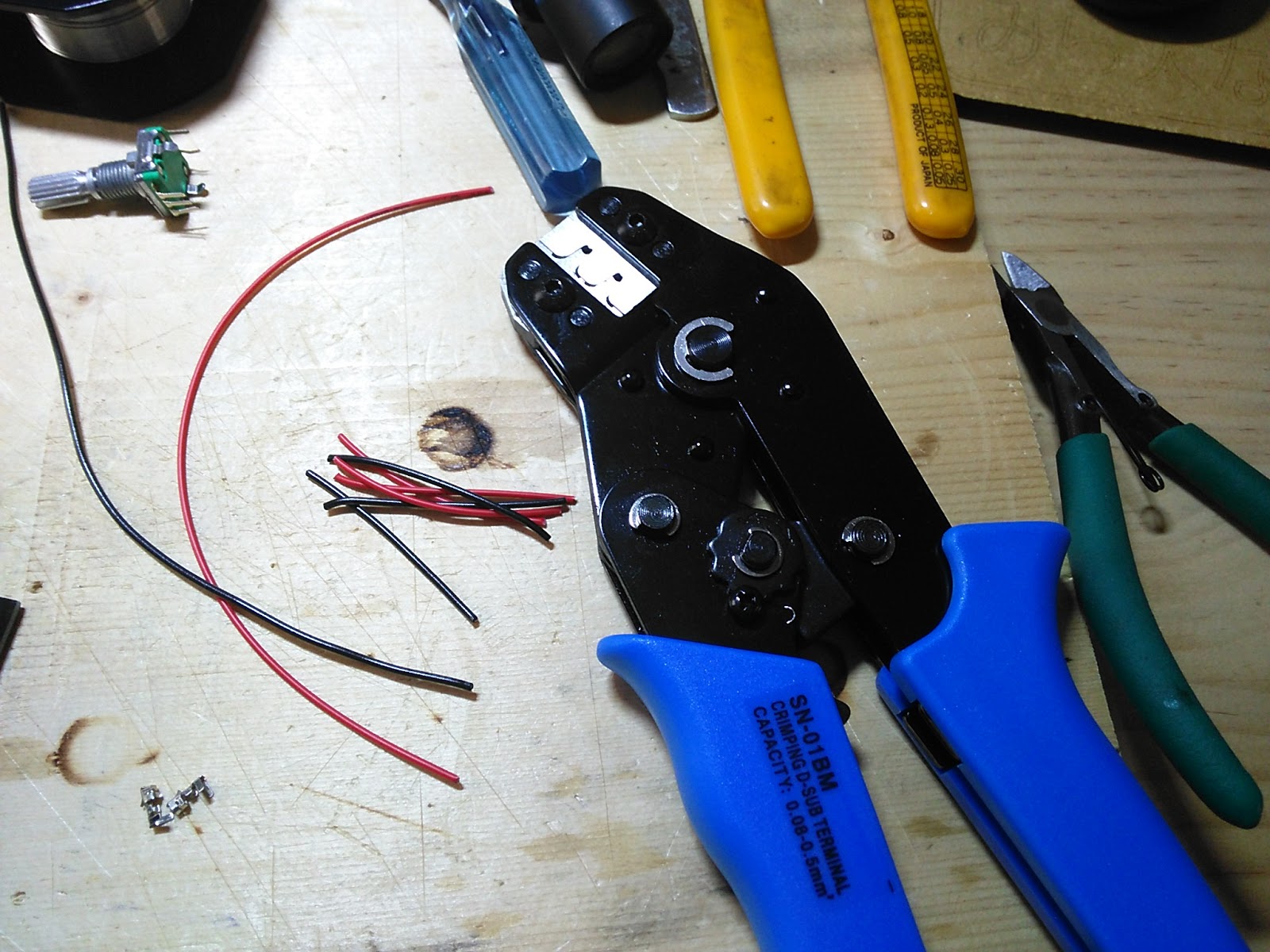
しかしながら、きれいな仕上がりには満足であります。
※この後やっぱり我慢できなくて再度カシメペンチを分解し、ついにダイを外すことに成功しました。これはまた別の投稿にします。
電源ハーネスできました。
お次はこの三連スライドボリュームです。今は二つしか使っていませんが、おそらくもう一つ必要になると思いますので実装はしておきます。
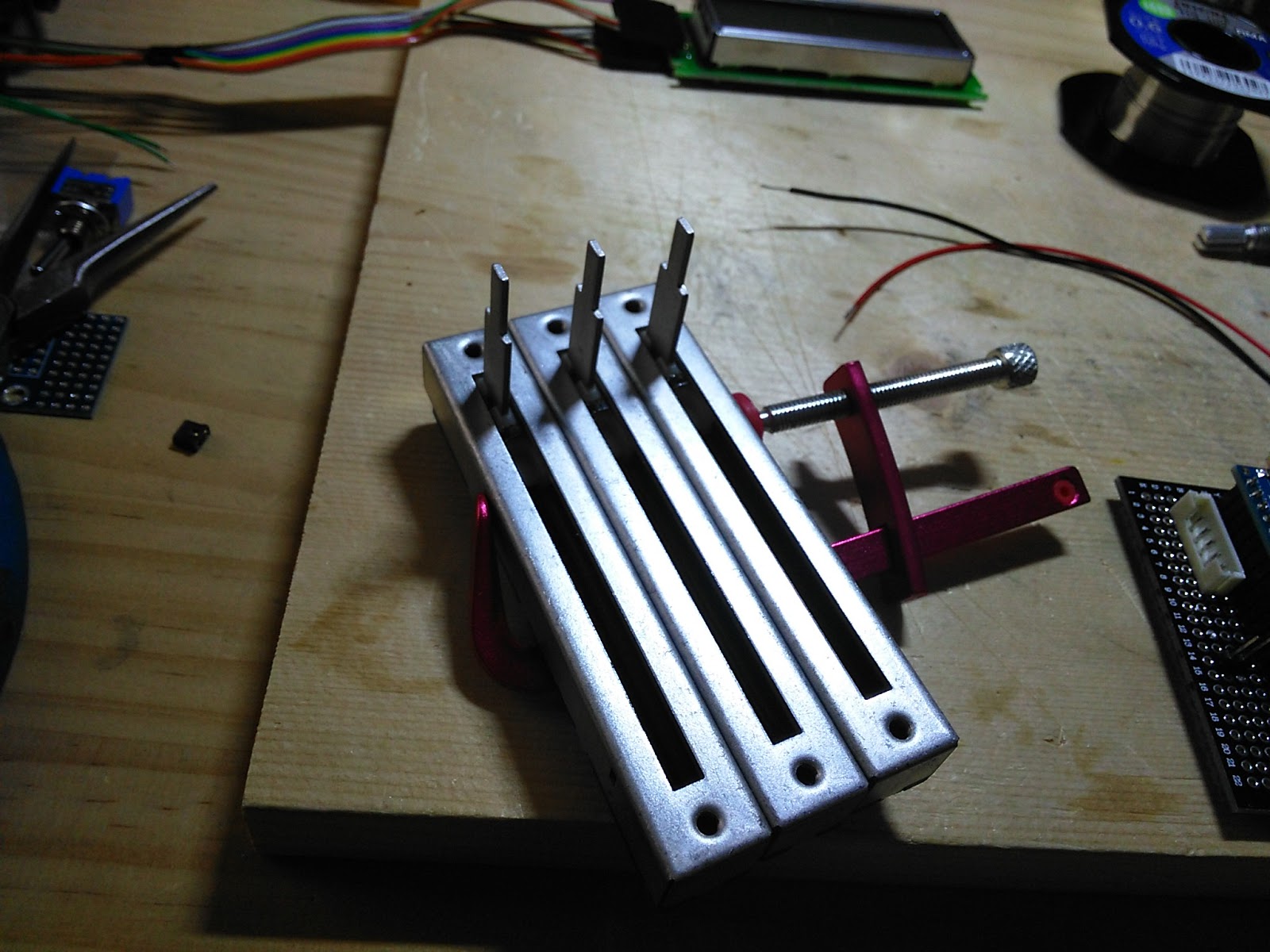
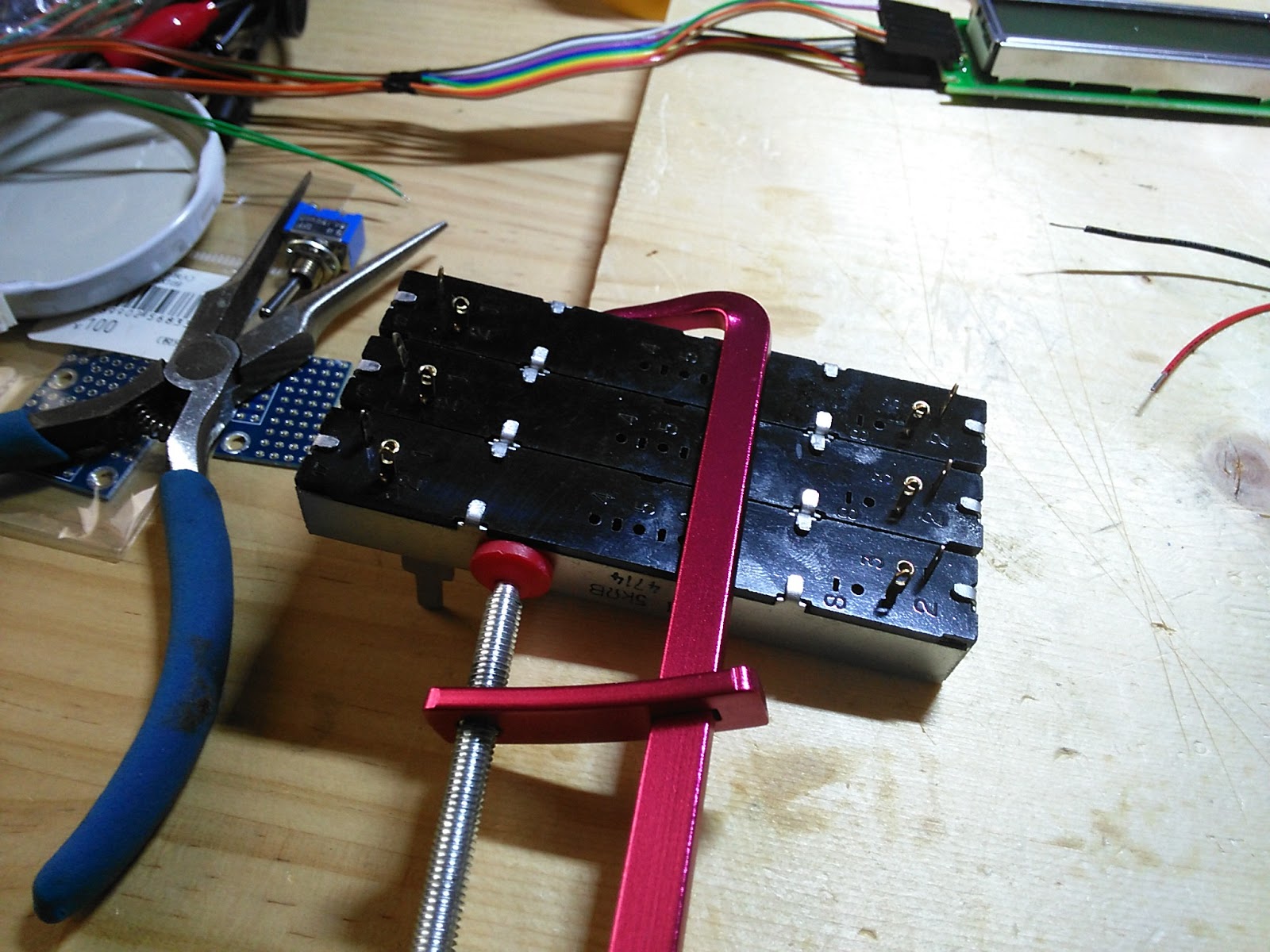
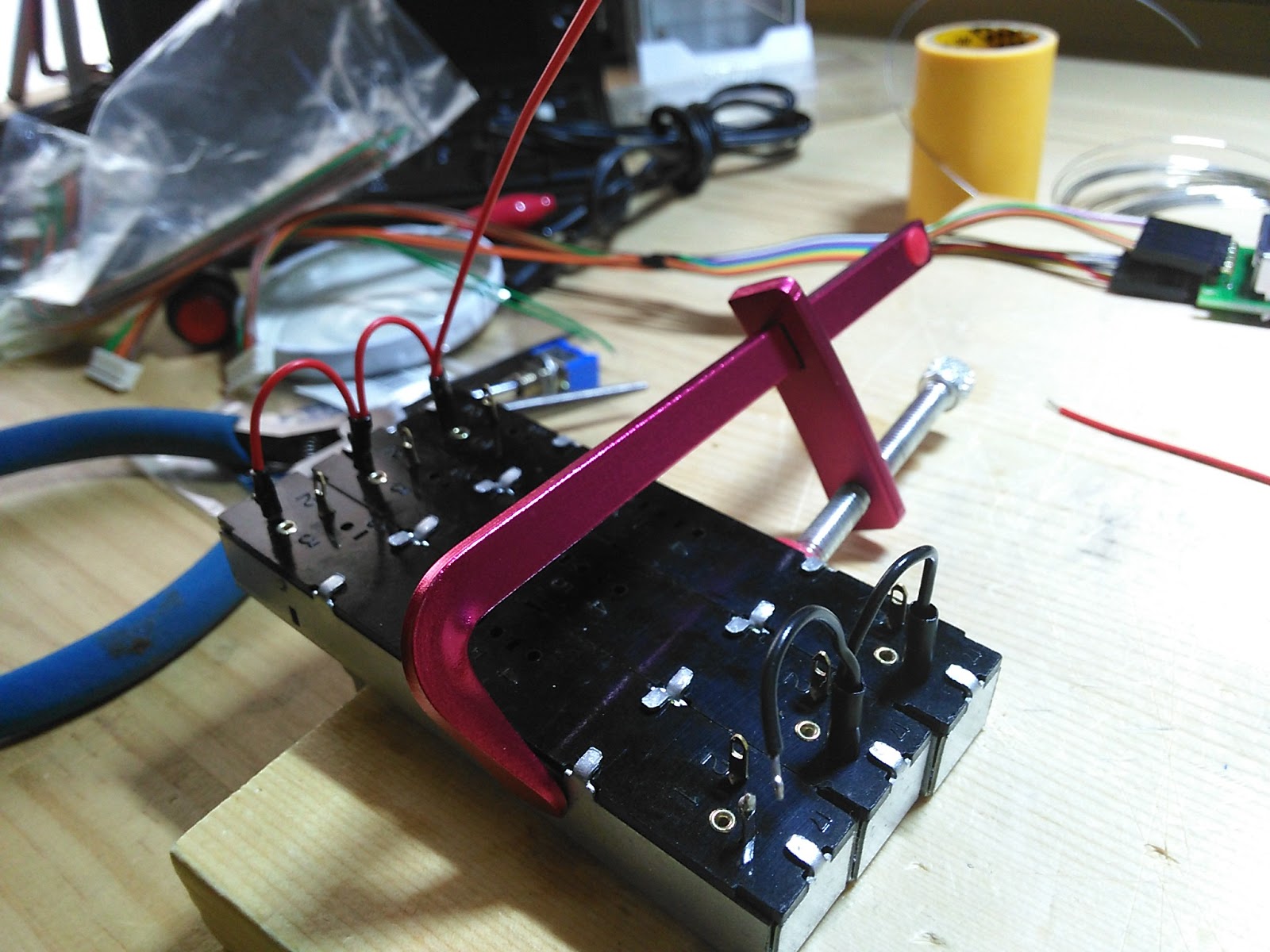
3つをまとめてクランプで固定しておいてハンダ付けしていきます。
できるだけ配線がとっちらからないようにしたいのです。
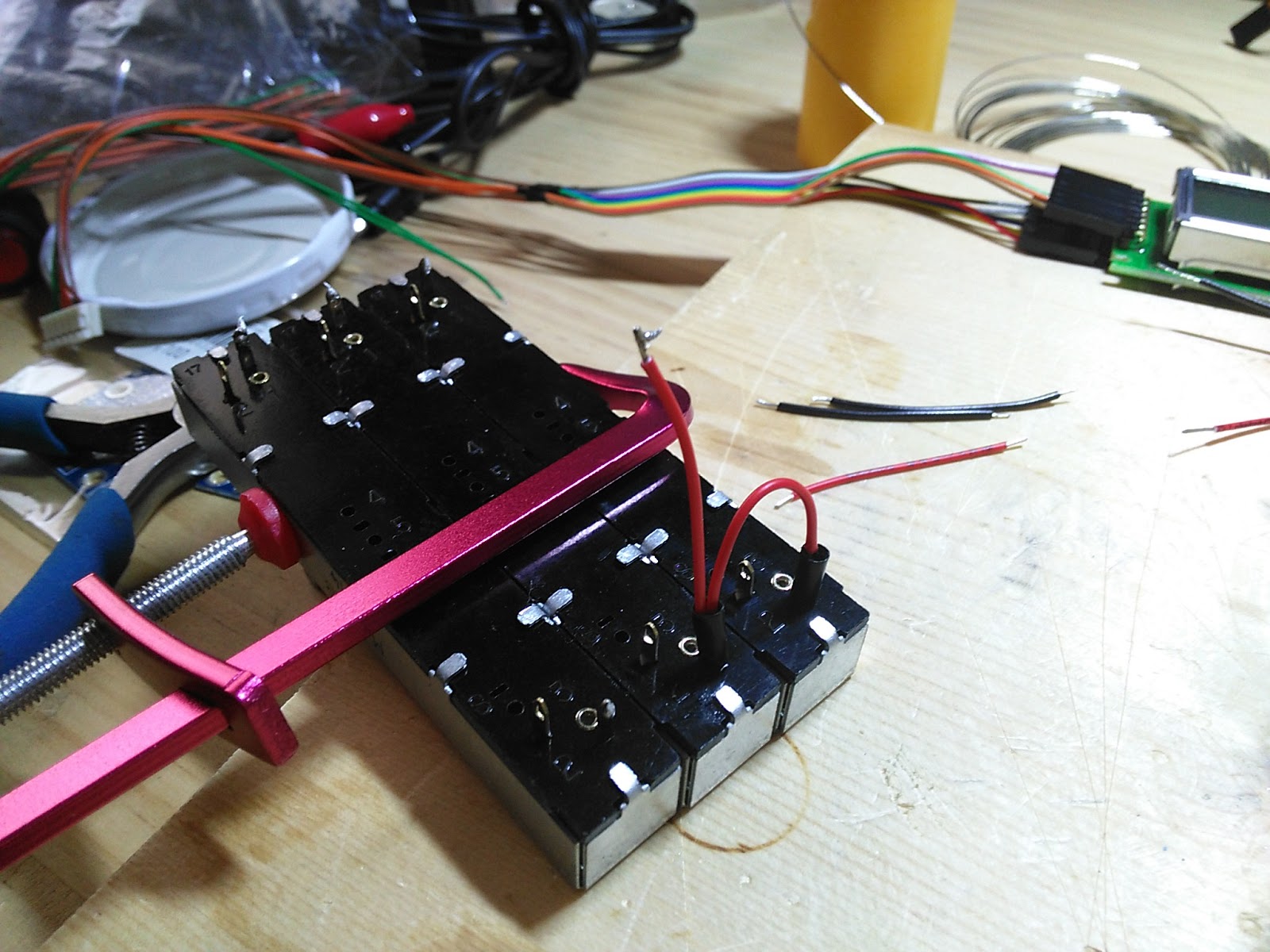
両端に電圧をかけ、スライダーに分圧が現れるように配線します。
これにも若松コネクタを取り付けて完成。
実装では挿し間違えを防ぐためにコネクタは同じ形で同じピン数ものを使わないのが常識ですが、ここはコストパフォーマンスには敵わないのです。
ハーネスだらけになりそうな予感。

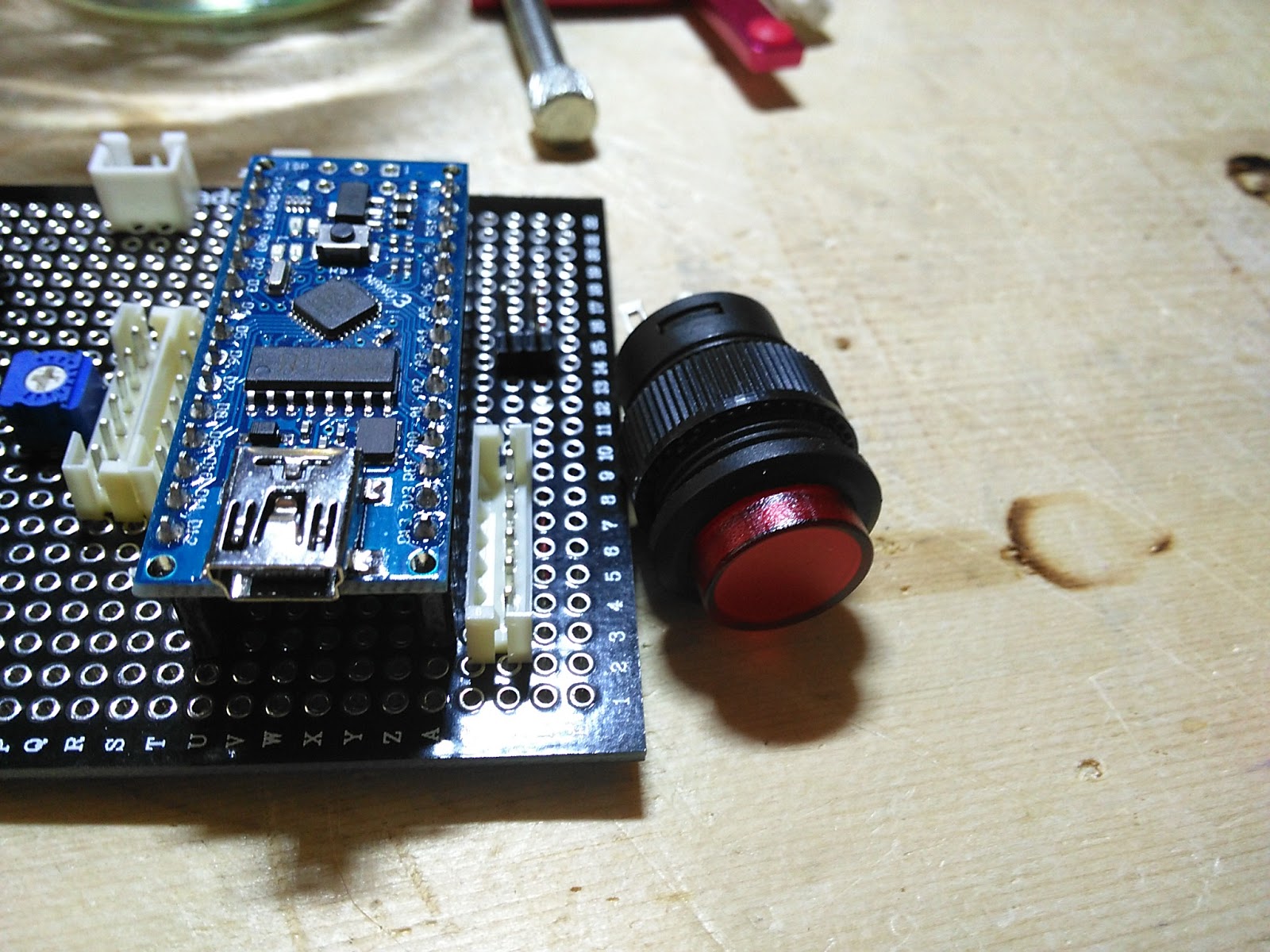
お次、リセットスイッチです。
choitechさんのご提案による起動シーケンスを搭載しようとしておりますので、そのためです。起動シーケンスはその名の通り起動時にしか行わない動作ですが、そういいつつもいつでも見たいじゃないですか。その時にはこのリセットボタンをポチれば見ることができるようになります。そのための実装です。
ハーネスつけます。
実はこのスイッチ、LEDが内蔵されています。aitendoで買ったものです。
当初は「起動シーケンスの時に点滅、通常動作時は点灯させるとかっこいいんじゃね」と思ったのですが、実際にLEDつけてみるとこれが何とも残念なのです。内蔵されているのはよく見る砲弾型の赤LEDで、ボタンのサイズよりも発光点が随分と小さいのです、しかも中心からずれてます(笑
ということで、やややる気がなくなりながらも、一応制御可能なようにArduinoのピンに接続できるようにします。
ここは4線なのでたくさん持っている5PのXHコネクタを使います。こんなところでバカ除けする必要はないです。はい。

出来ました。ハーネス長すぎ。多分あとで切ることになります。
LCDのコントラスト調整の半固定も実装しました。
リセットボタン内蔵LEDの電流制限抵抗をつけます。
これで今のところ必要なものは取り付け終わりました。
うら。60点というところかな。
全てのハーネス類。

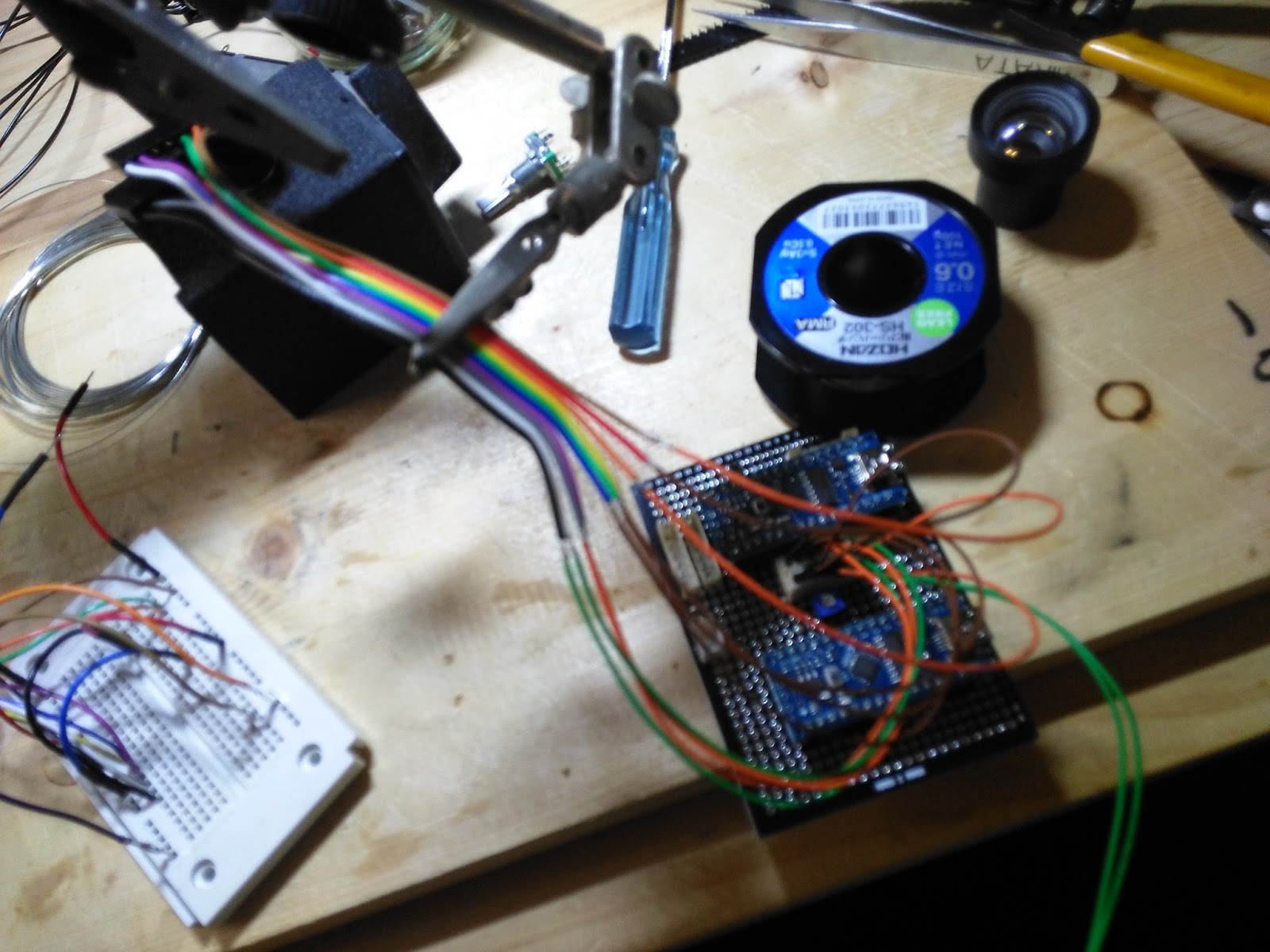
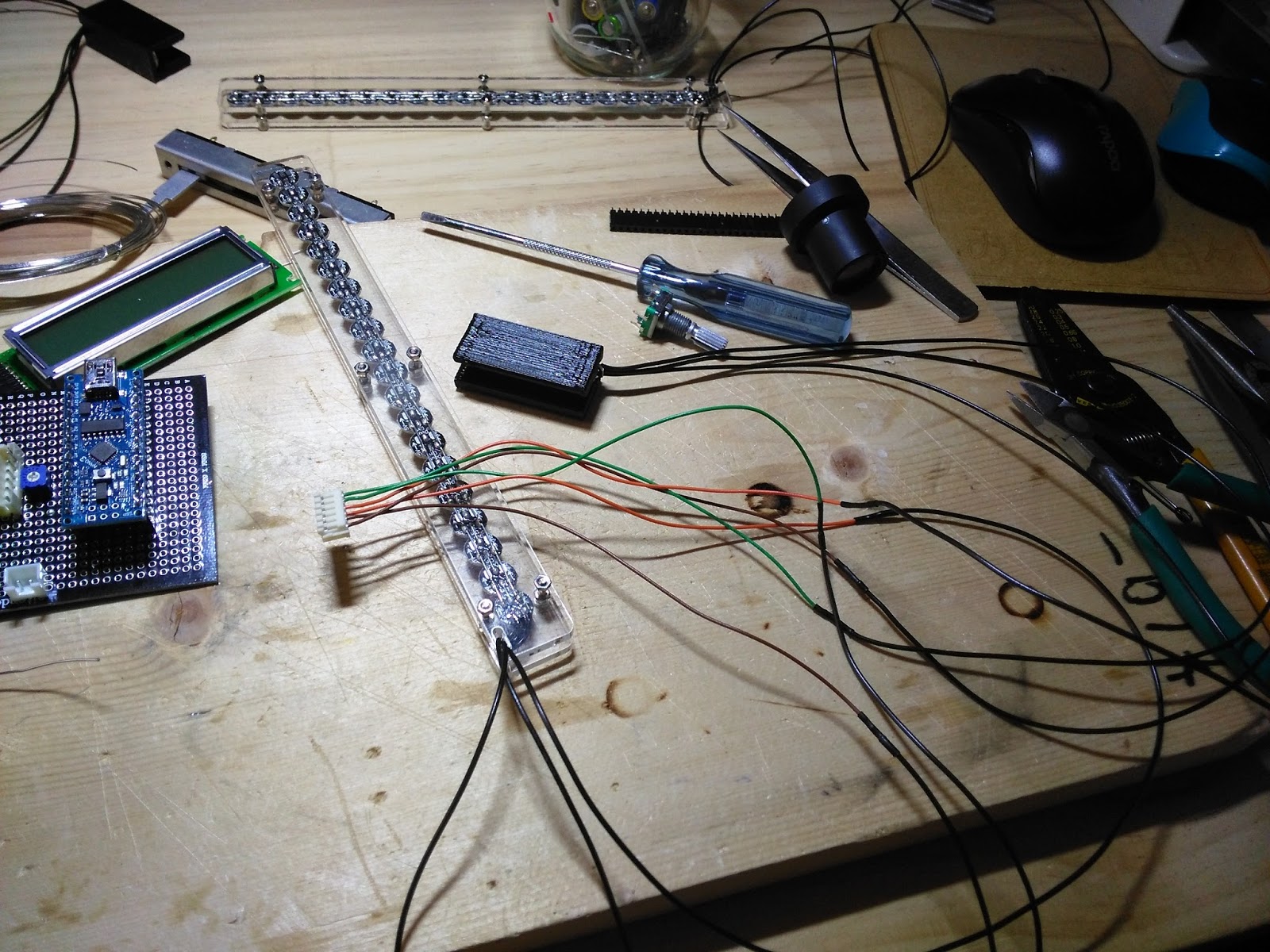
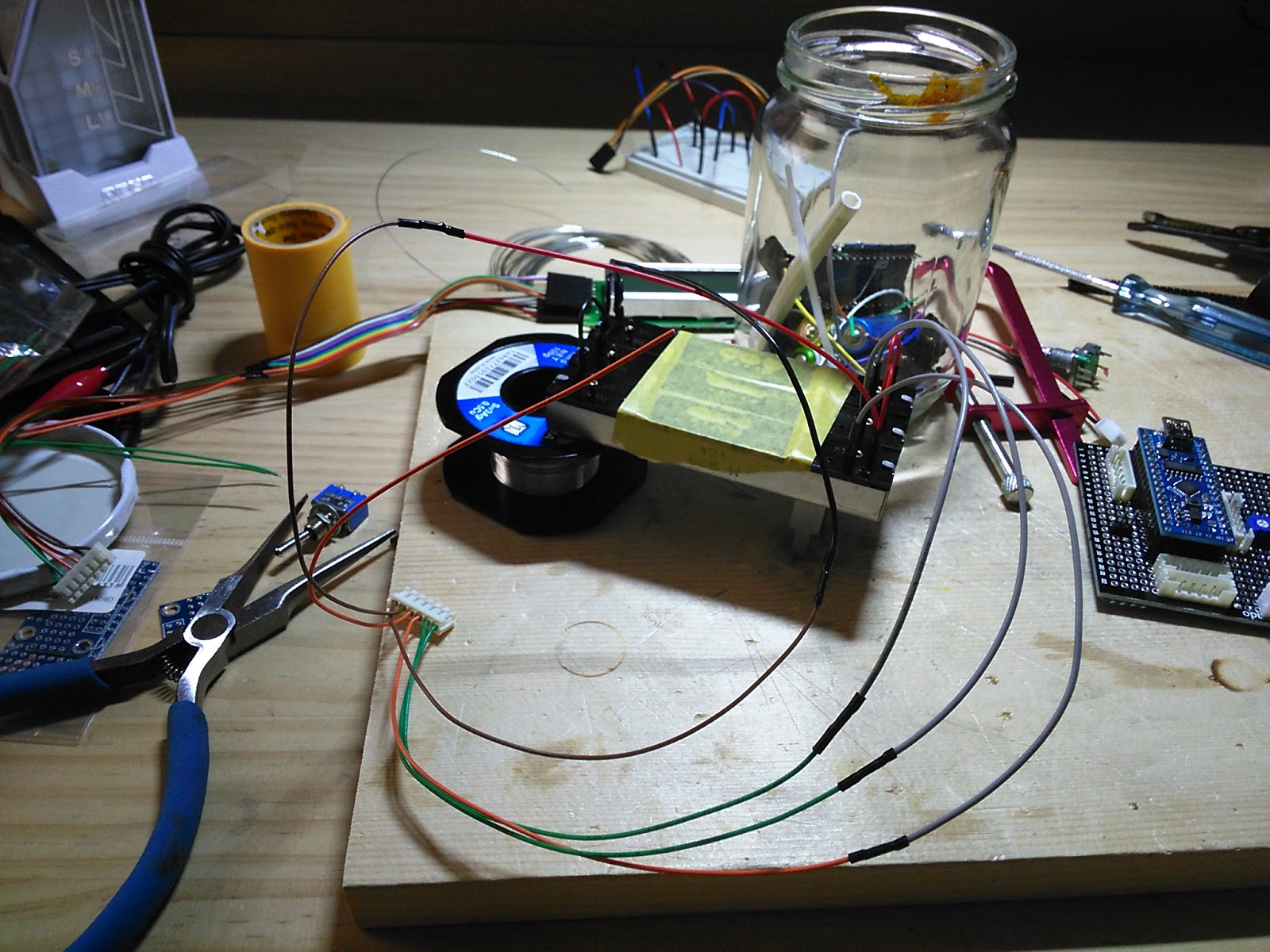
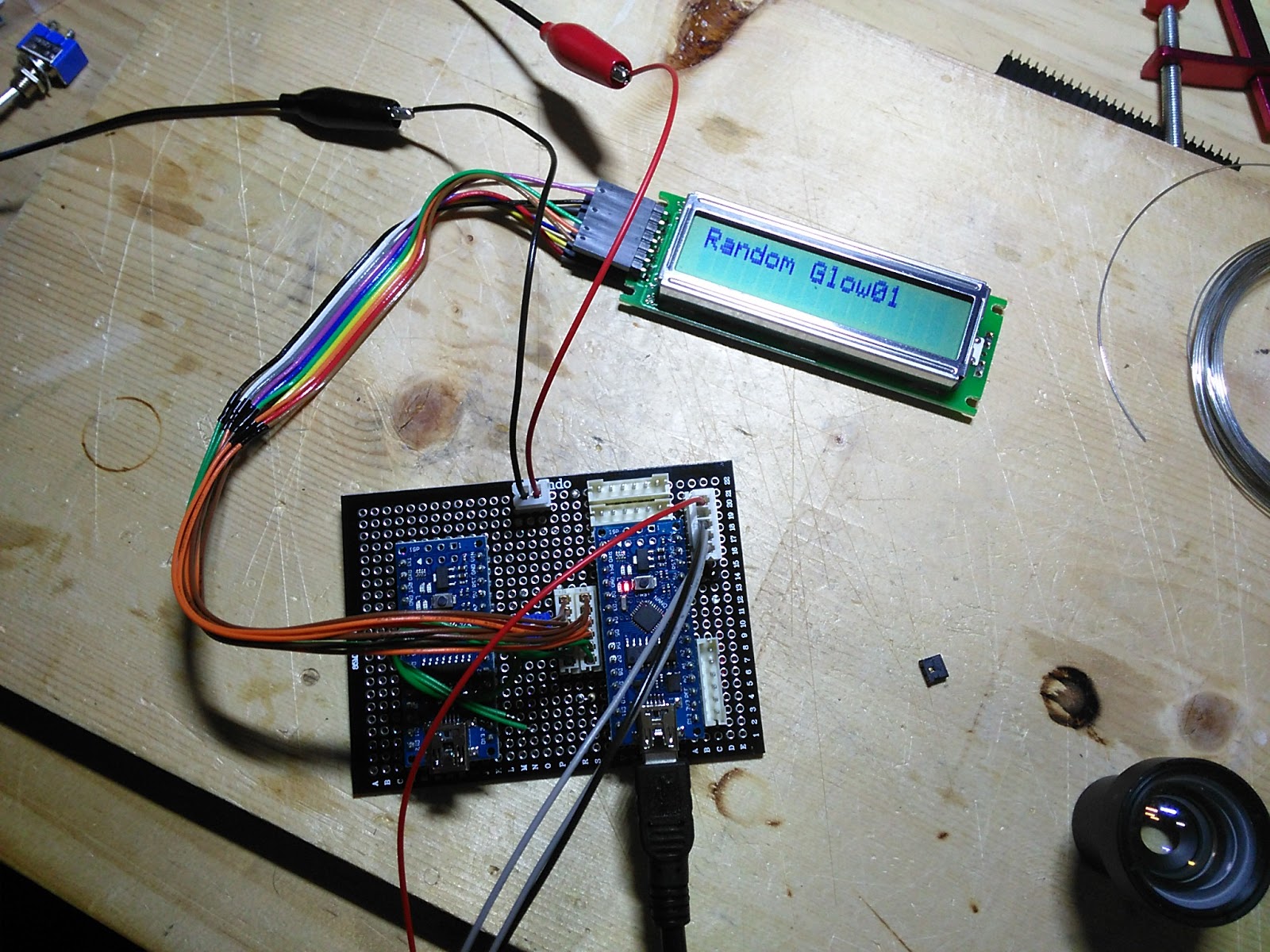
LCDから順に接続して動作の確認を行います。
WS2812を繋ぐときにはArduinoとは別に定電圧電源から給電を行います。
ArduinoはPCのUSB電力で駆動します。グランドのみ共通にし、互いの電圧はぶつからないようにします。
しかし、この配線にするとPCがないとイルミネーションが動かなくなってしまいます。ので、基板上にはジャンパを設けており、プログラムが終わってPCを外した後でジャンパを繋げばArduinoも定電圧電源から電力供給が行われるようになっております。
これでモバイルブースターなどでイルミネーションを動かすことができます。
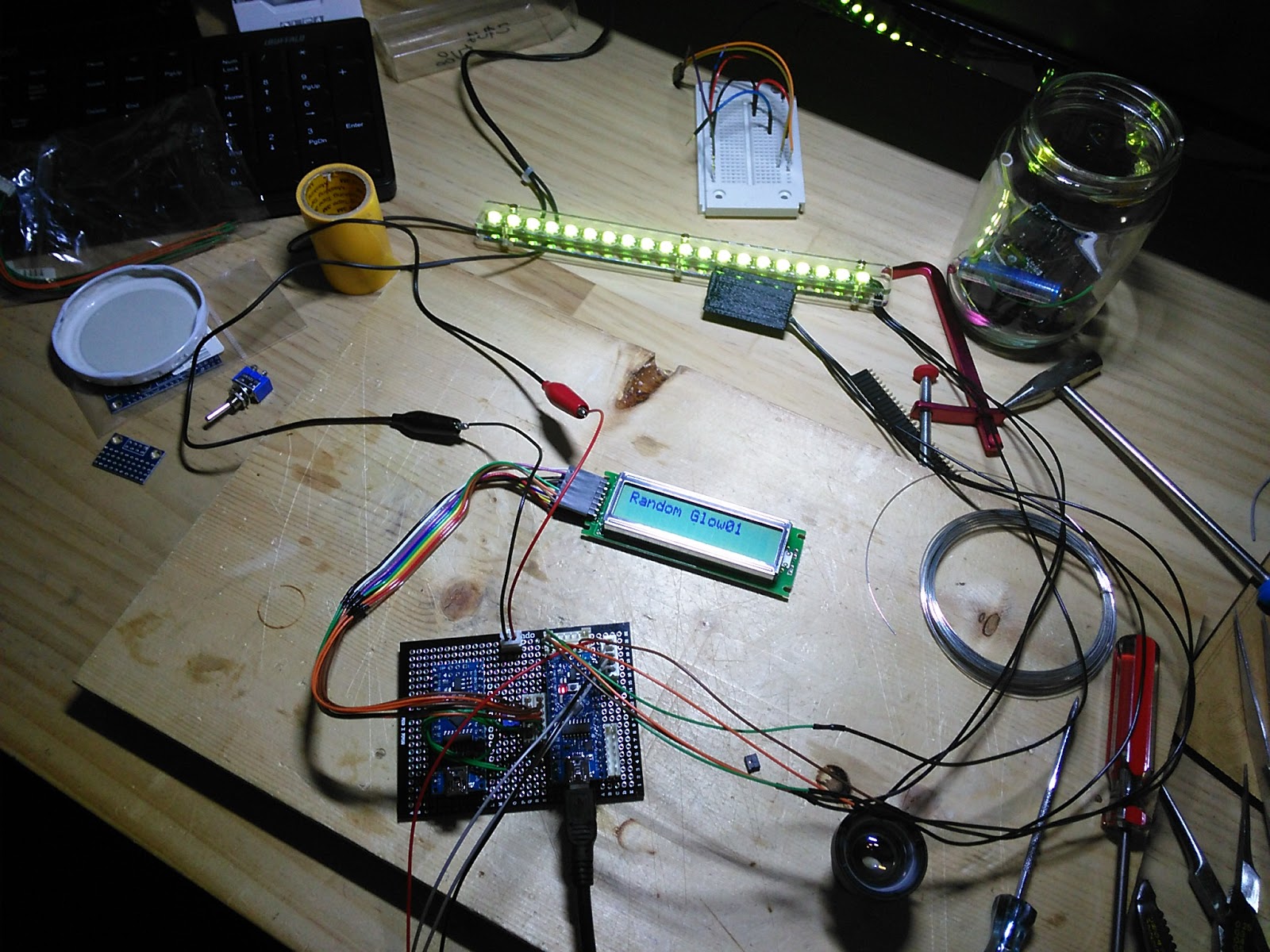
LEDもつないで動作確認を行います。
最終的にスライドボリュームもつなぎます。
無事動作を確認できました。実装完了です。
次はこれをケースに収めてシートへ固定する必要があります。
だんだん完成に近づいております。