
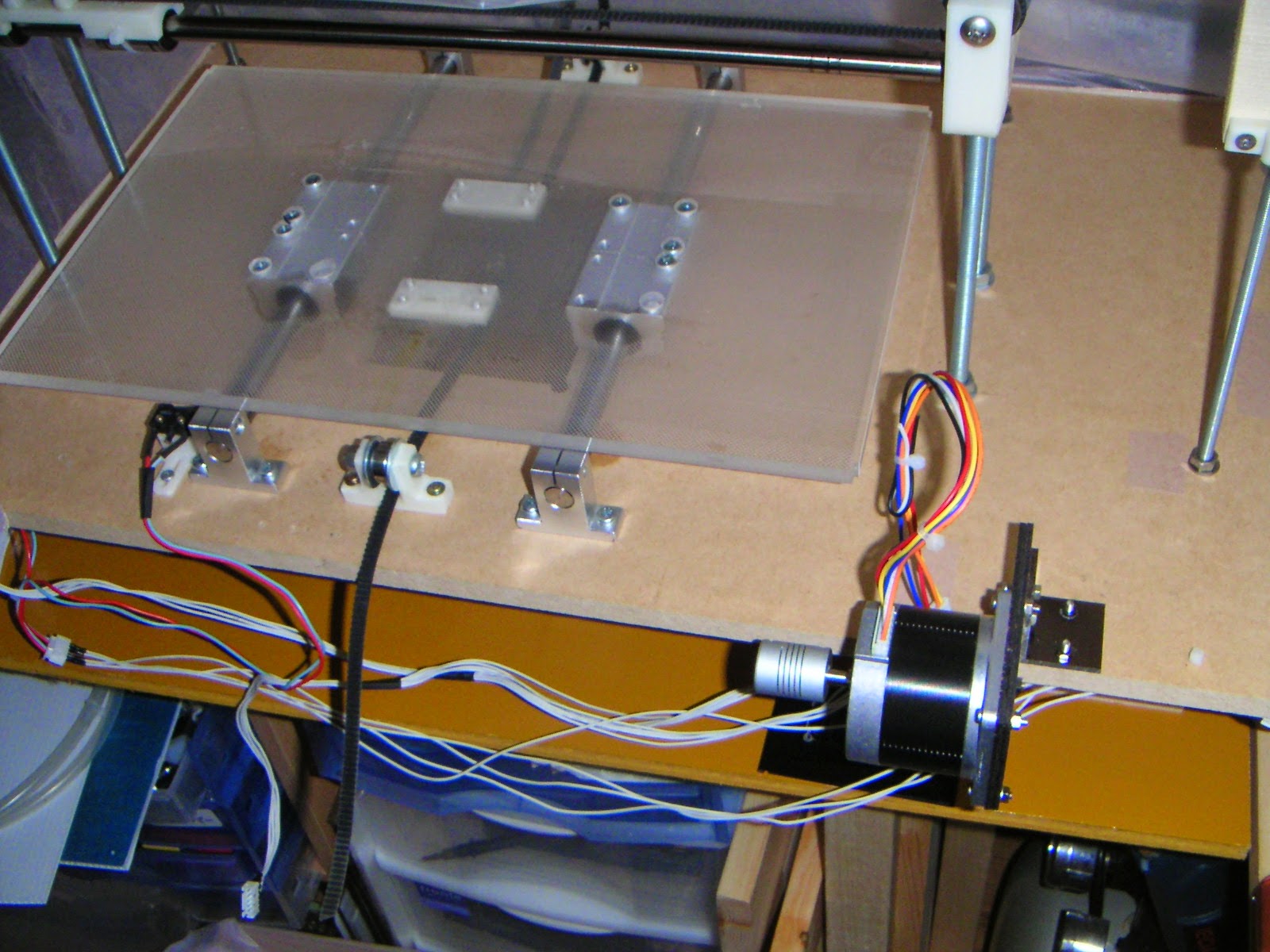
壱號機のY軸はXY分離型の設計になっており、ステージを前後方向に動かします。このステージにはA4大で厚さ10mmくらいのアクリル板を使っており、さらにその上に位置決め冶具やらジャッキを二つやら載せるということで結構重たいものになっております。一方で、それを駆動しているモータは40mm角で長さが30mmしかありません。秋葉のジャンクで買ったものですのでスペックは一切不明ですが、どう見ても余裕があるとはいえません。実際ちょいと手で押さえてやるだけで簡単に脱調します。やっとこさ動いているというところだと思われます。
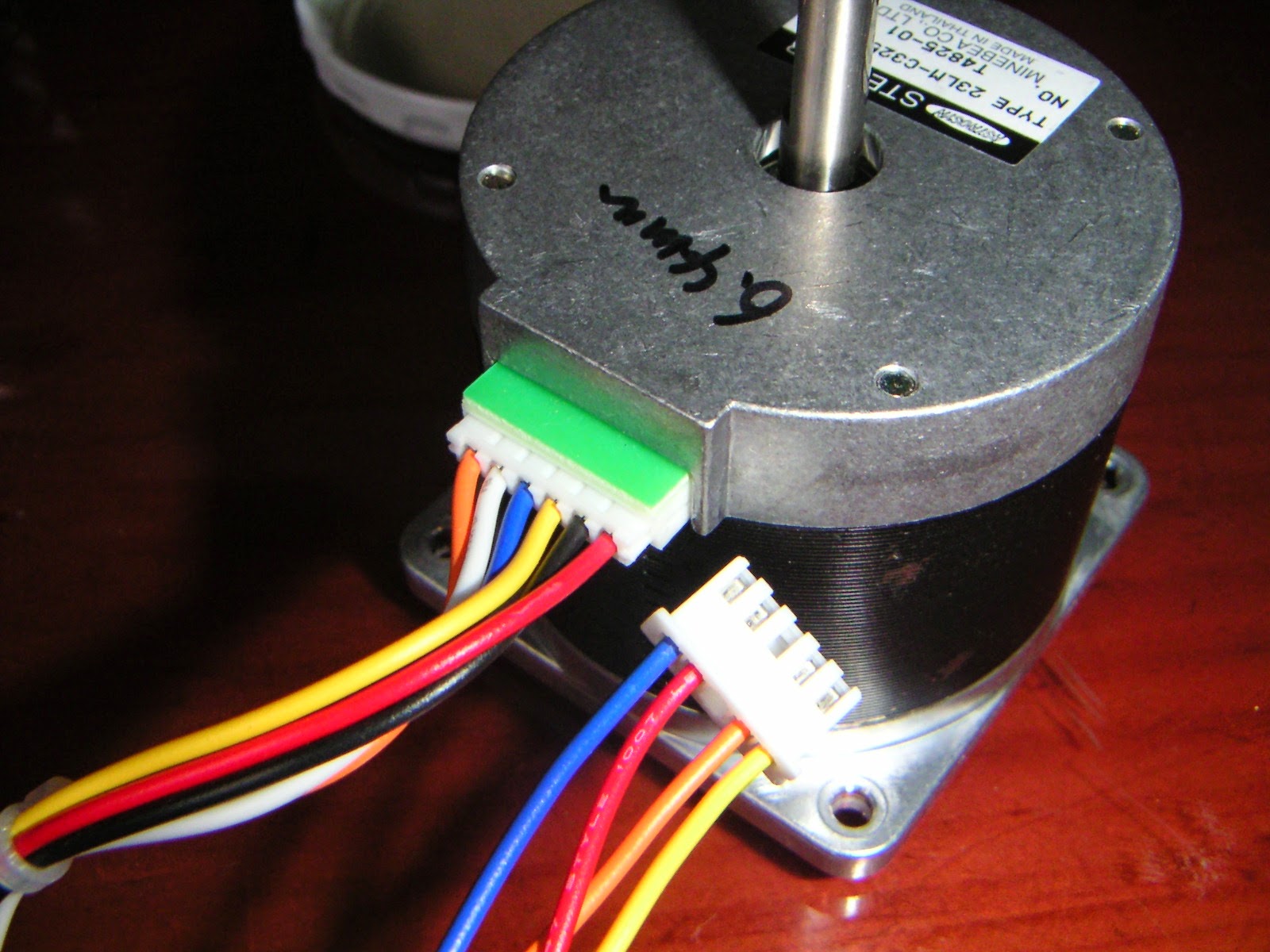
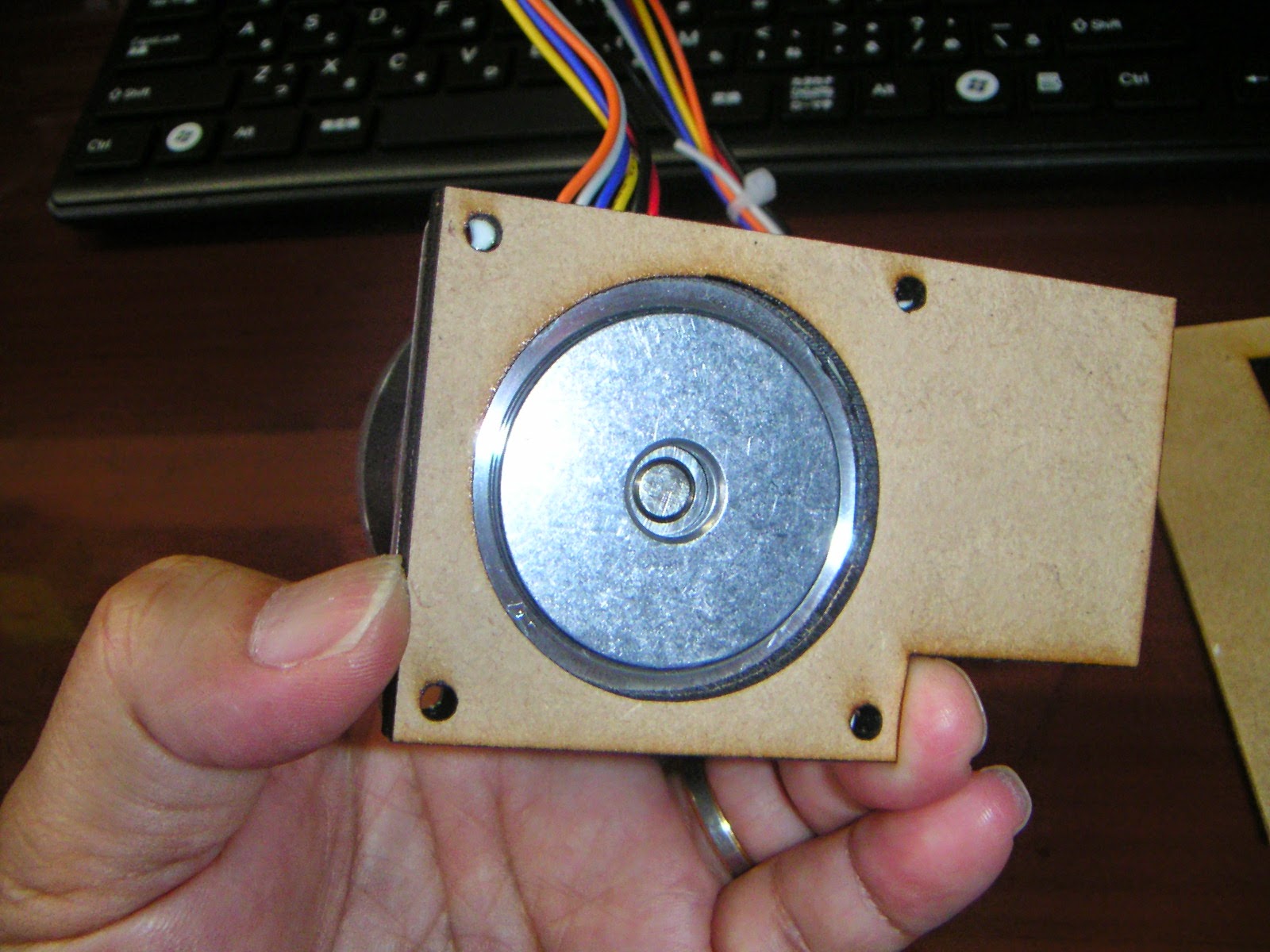
これではあまりに怖いので、少し大きなモーターに代えることにしました。50mm角で長さも40mm以上あり、今使っているものに比べるとふた周りくらい大きい印象です。これもジャンクで買ったのでスペックはわからないのですが、モータの出力は大きさに比例しますのでパワーアップするのは間違いないと思われます。
ということで、これに交換です。

まずはメカパーツ箱をみて、どんな構成にするかを考えます。

今のモータに比べて大きくなりますので、単純に置き換えるとステージが引っかかります。ので、ステージの横にモータを置いて、シャフトを伸ばしてくる必要があります。
こんな感じで行きましょう。
ではさくっと設計します。
壱號機の組図を書き換えていきます。まず使う部品を図面化して、
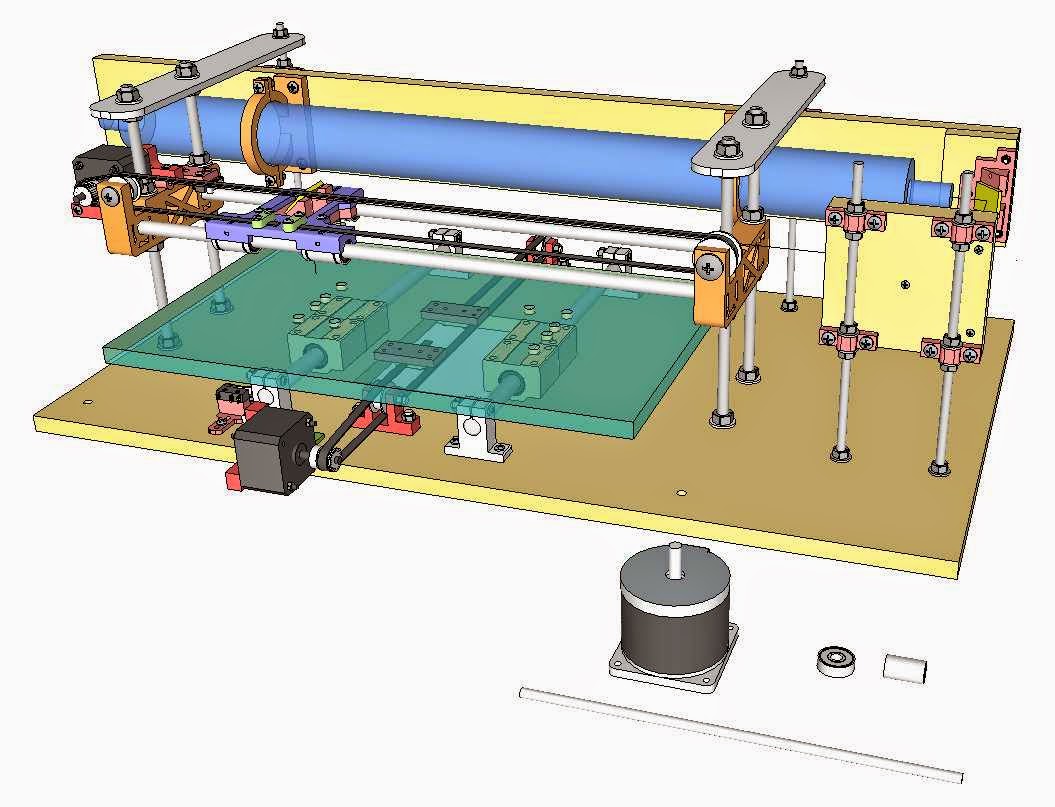
こんな感じにモータをオフセットしましょう。
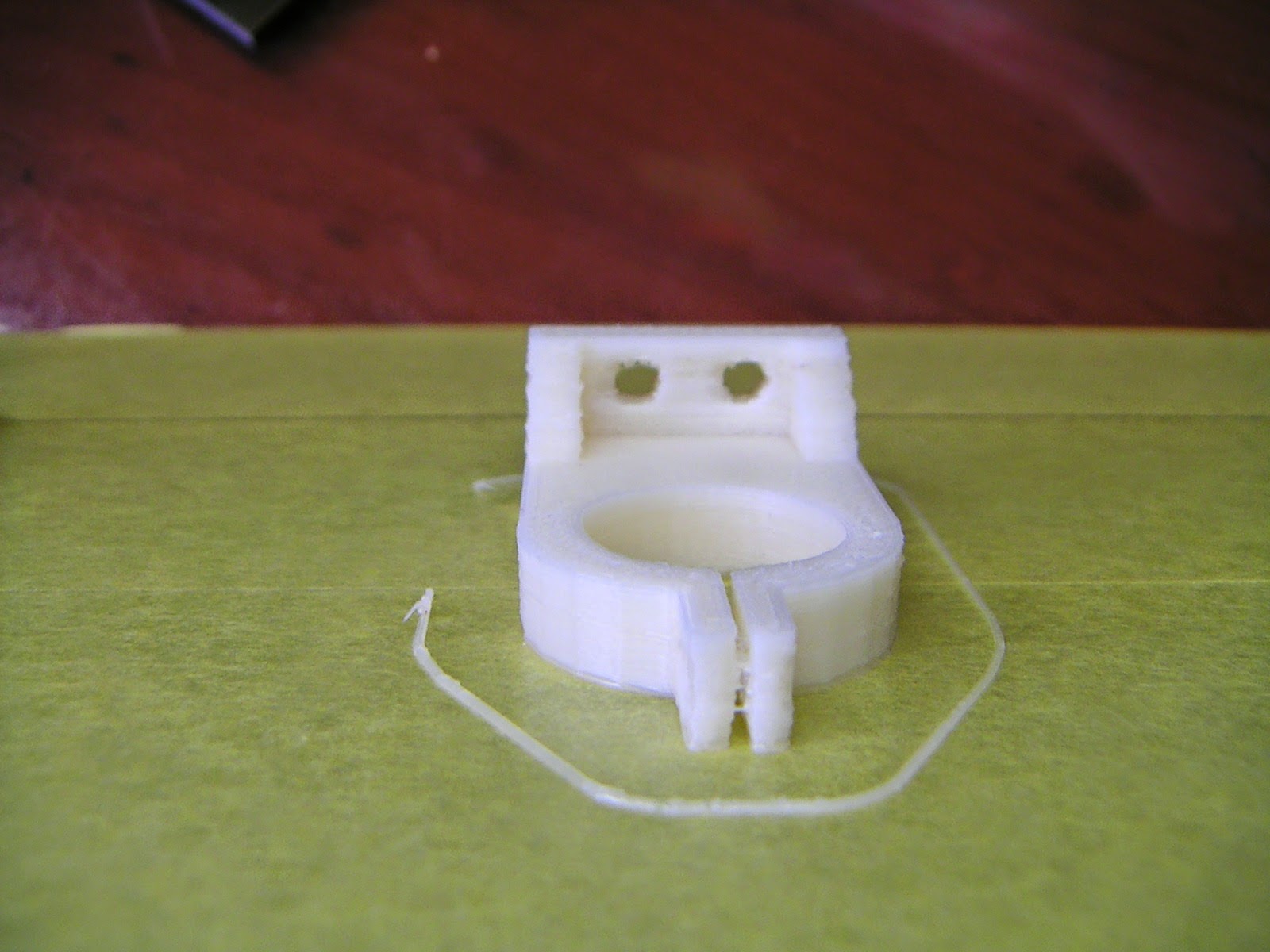
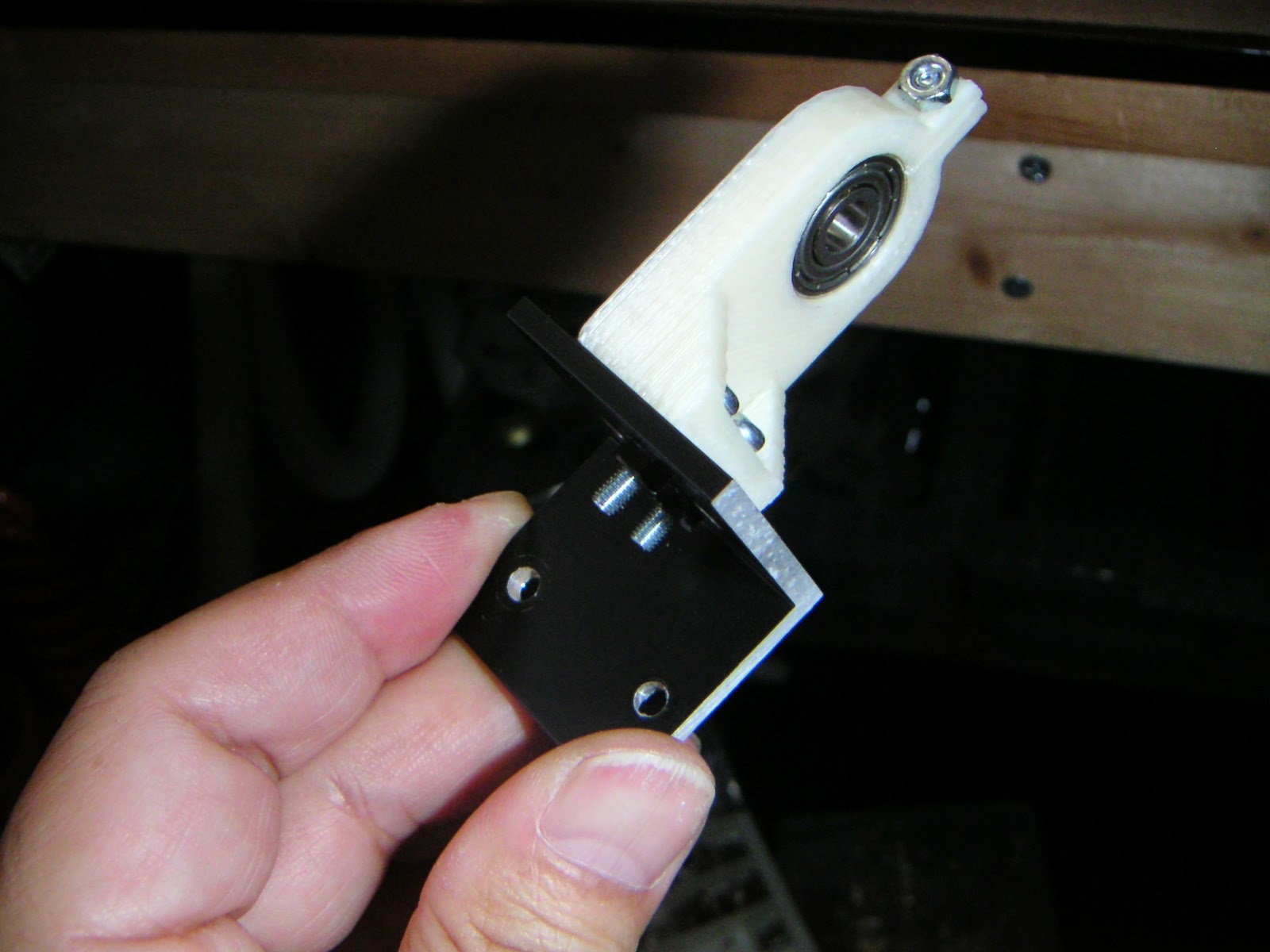
シャフトの他端はベアリングで受けることにします。このベアリングホルダを作らないといけません。
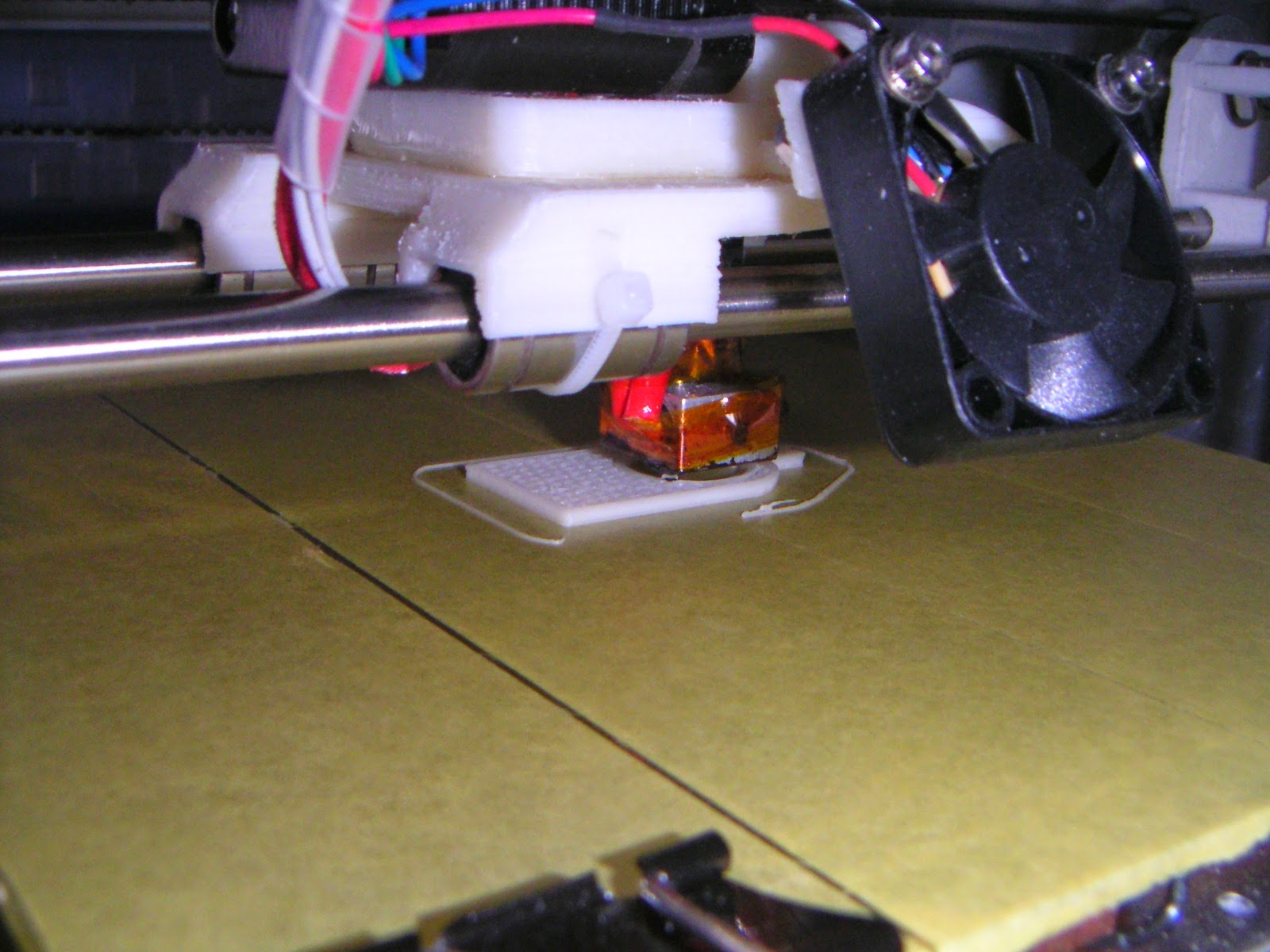
ということで、3Dプリンタさんの登場です。
3D図をSTLで出力してプリントします。
さて、プリンタが動いている間にモータの電気周りの準備です。
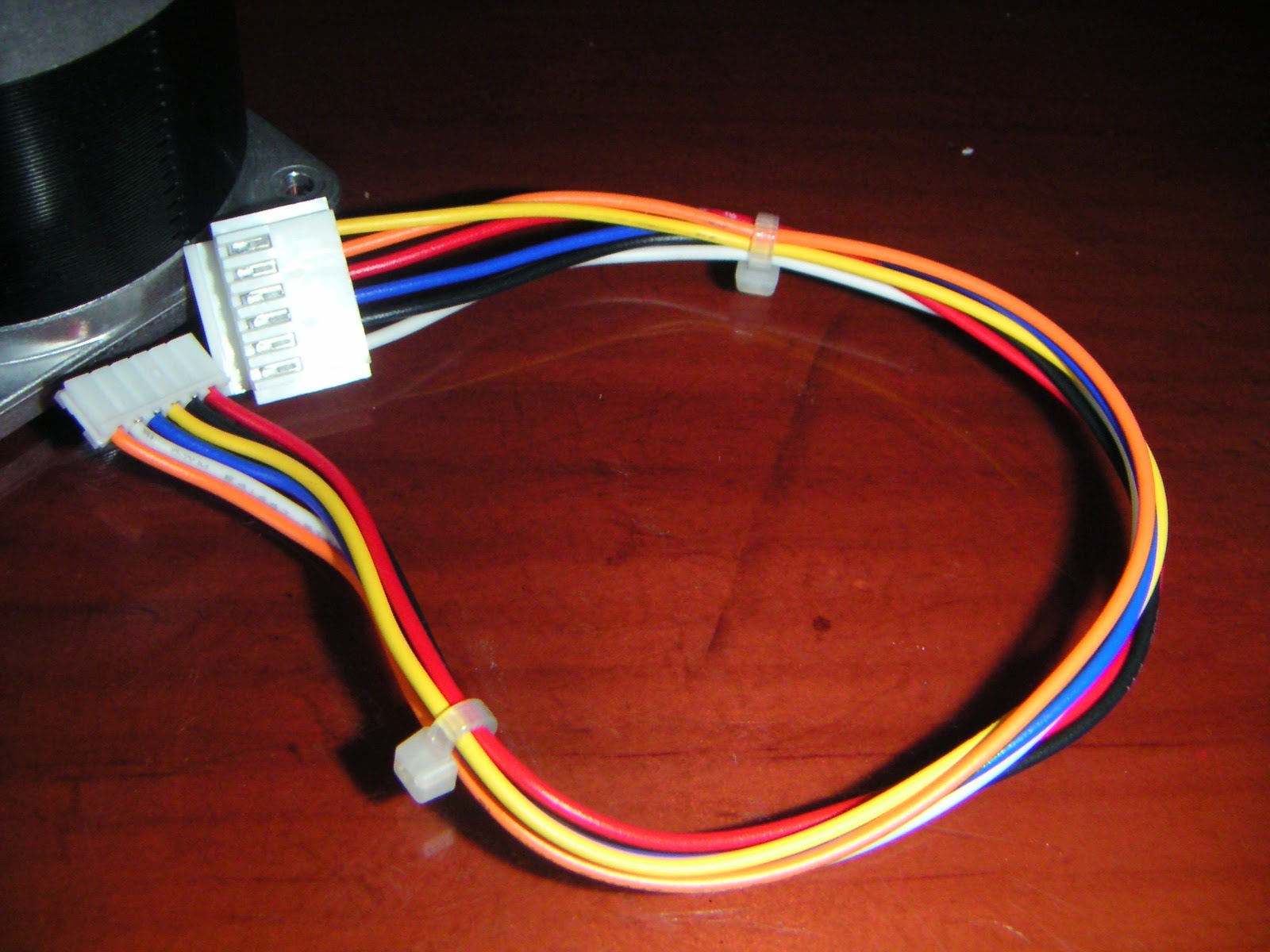
このモータは6本線が出ています。おそらく二相ユニポーラでしょう。
であれば3本ずつ二組のコイルに分かれており、3本はT字型にセンタータップが出ているはずです。
ということで確認。
適当に左側の端子から3本を選んで、黒と黄色の間が80Ω位。

黒と赤の間がやはり80Ω位。ということは、赤と黄色の間に黒のセンタータップが出ているという配線でしょう。確認します。

赤と黄色の間が160Ωと前二つの合計の抵抗になっています。推測した配線で間違いありません。

残りの3本も同じ配線でした。ということでこれで構成はわかりました。
ここで注意すべきことがあります。
いま使用しているモータの配線は下のようになっています。4本線です。
使っているモータドライバはアレグロ社のA4988を搭載したものです。これは二相バイポーラモータ用のドライバで、ユニポーラ配線は出来ません。ではどうするのかというと、ユニポーラをバイポーラ配線で動かします。 上の160Ωの二本を直列で使い、センタータップを使わないというものです。
ということで配線します。
コネクタを作ります。

一個一個作るのは大変ですが、使い勝手のよさには代えられません。

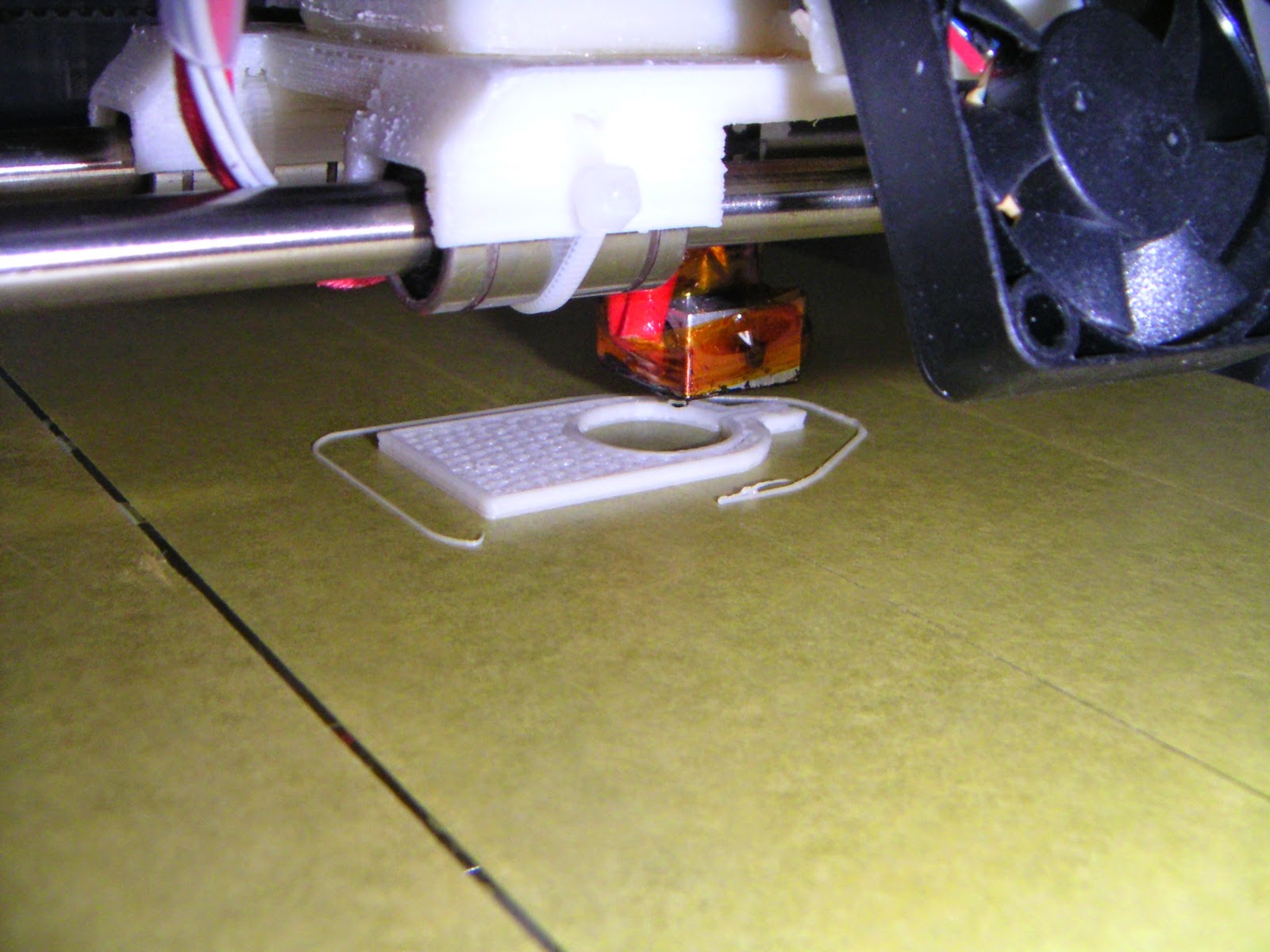
そんなことをやっている間に、ベッドがあったまってベアリングホルダのプリントが始まりました。
順調順調。
さて、モータに戻ります。ユニポーラの6本線をバイポーラの4本線につなぎました。
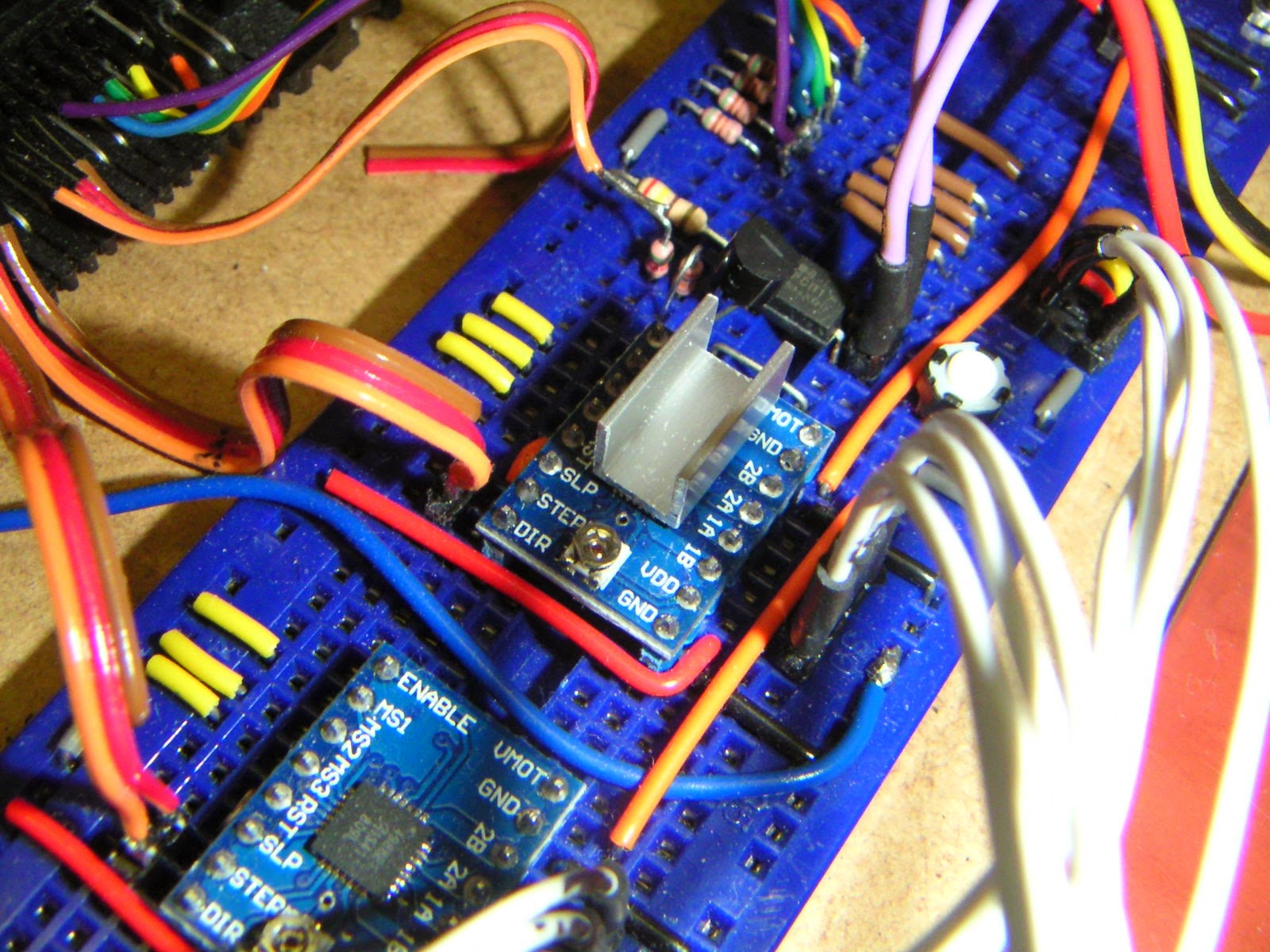
モータが大きくなる分電流もたくさん流したいので、モータドライバに放熱板をつけることにします。
使うのはホームセンターに売っているこのアルミチャンネル。

12mmくらいの長さに切ってA4988の上に瞬間接着剤で貼り付けます。
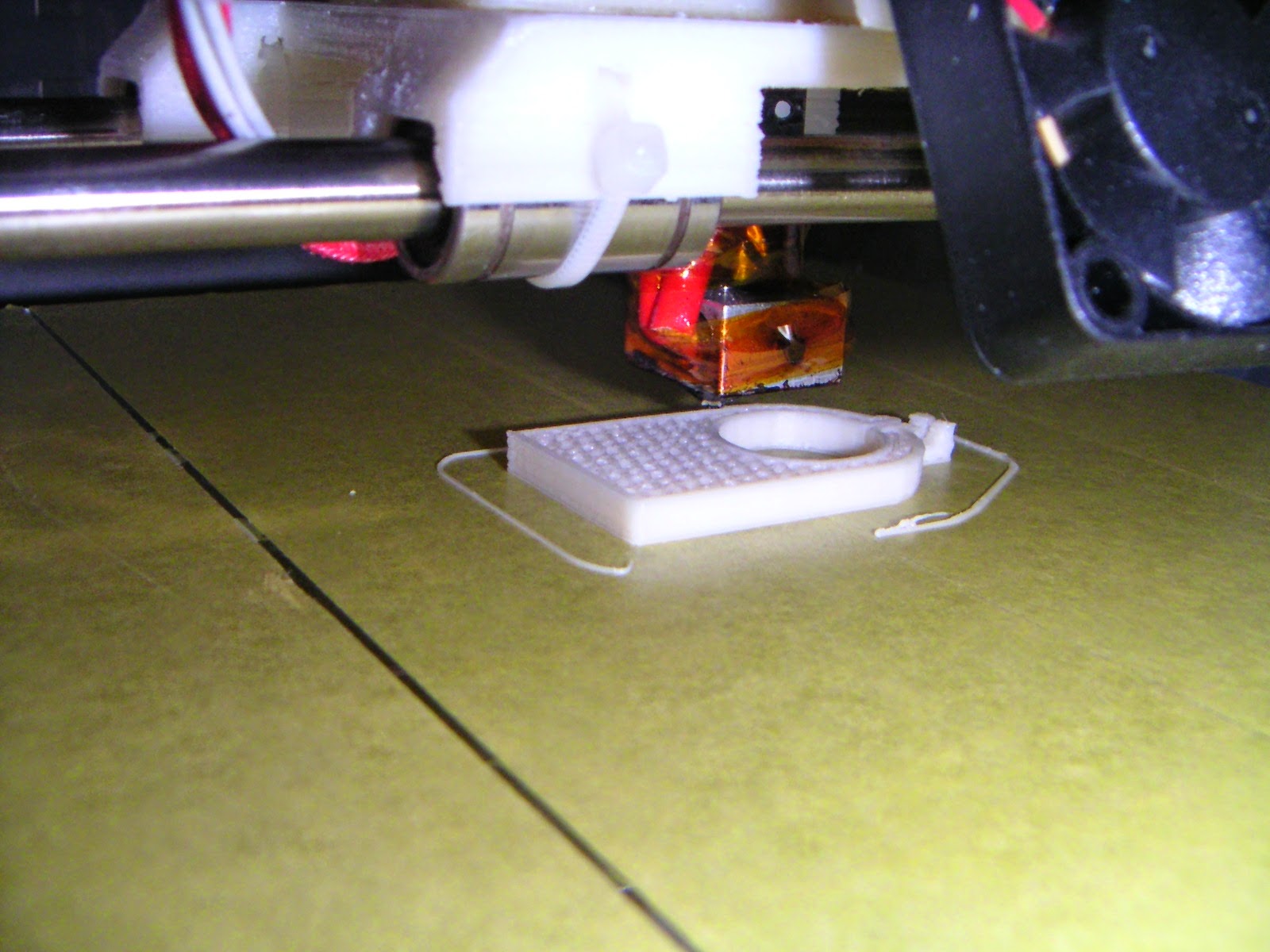
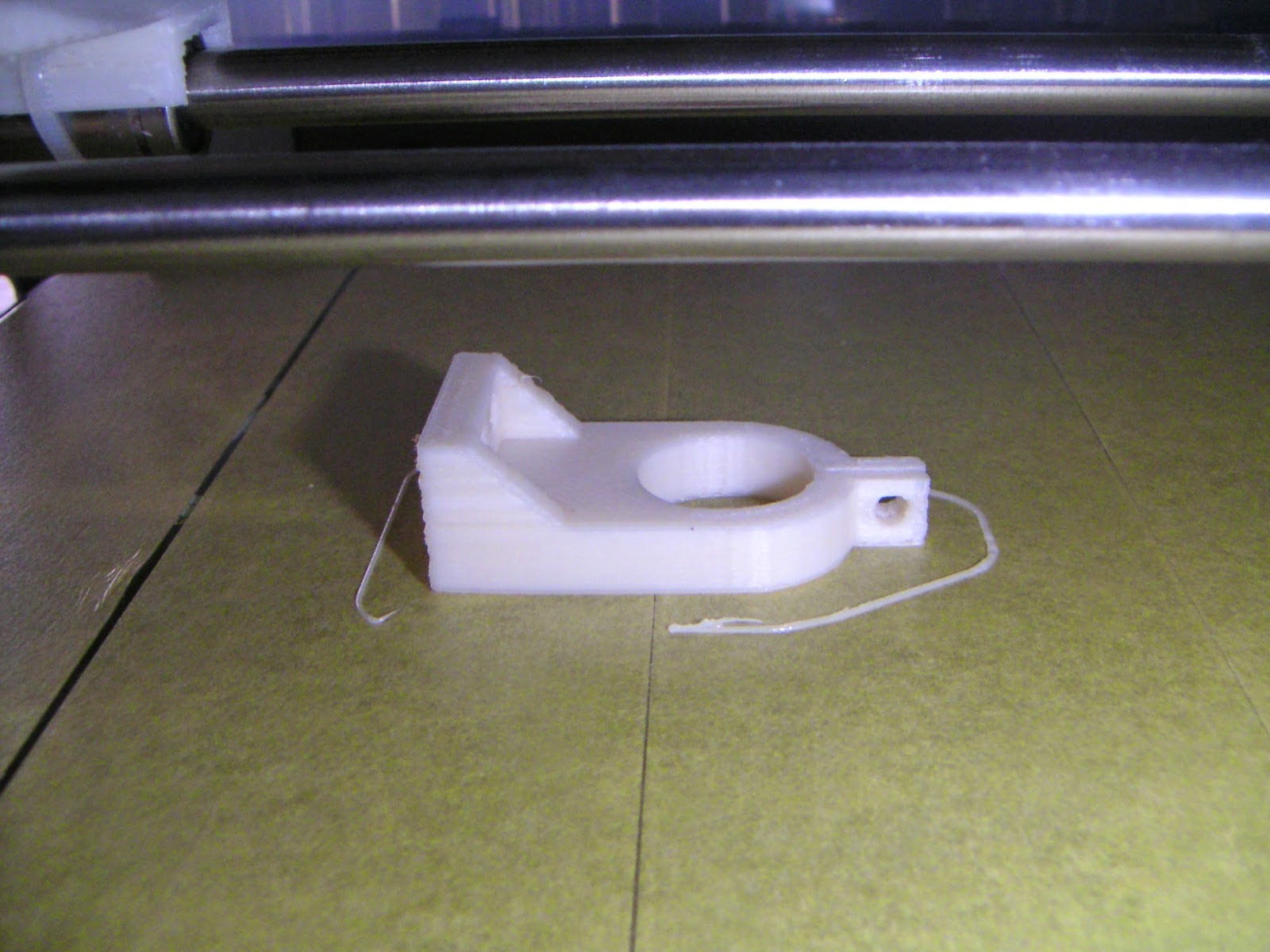
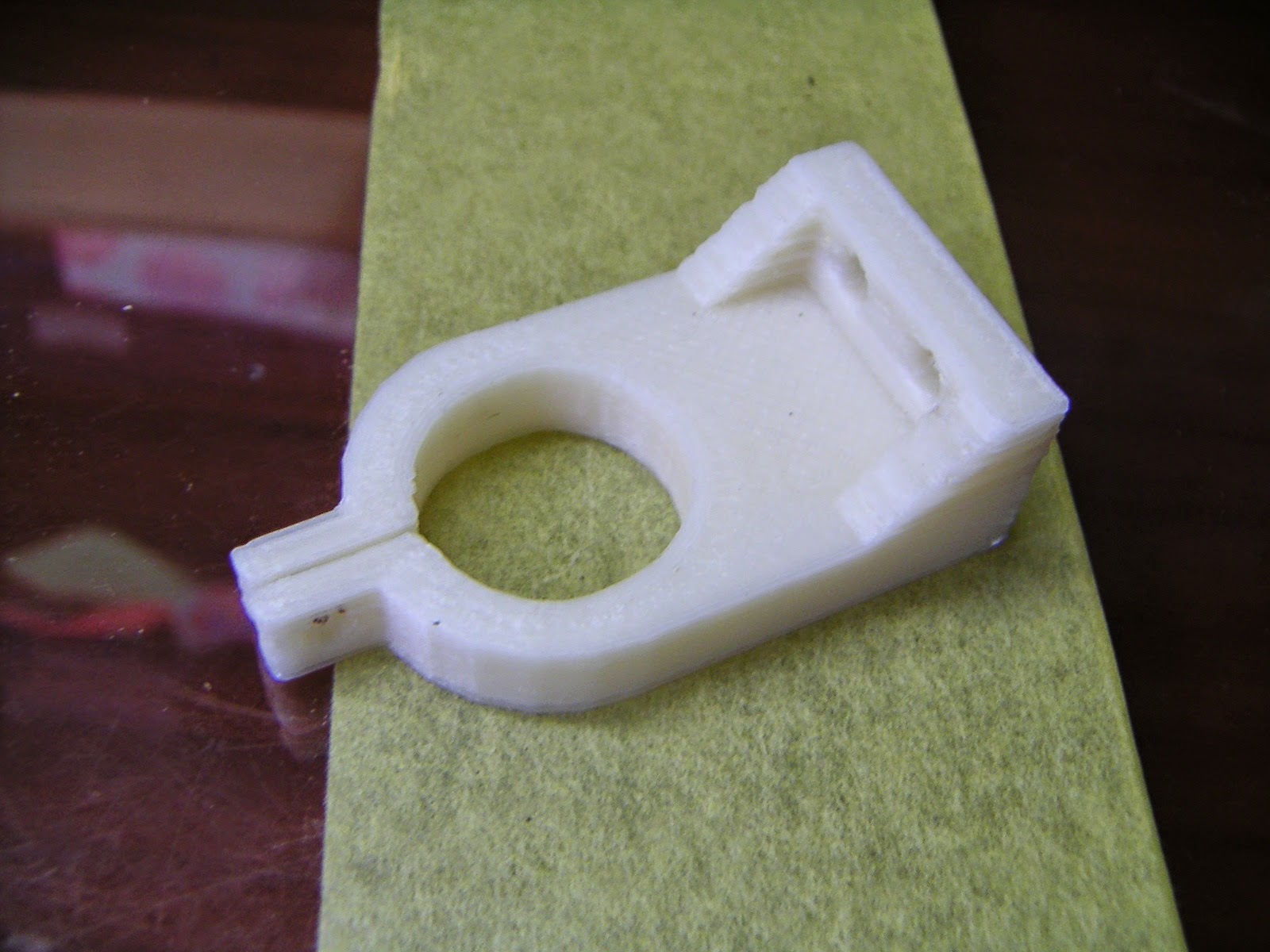
とかやっているうちにベアリングホルダのプリントが完成しました。
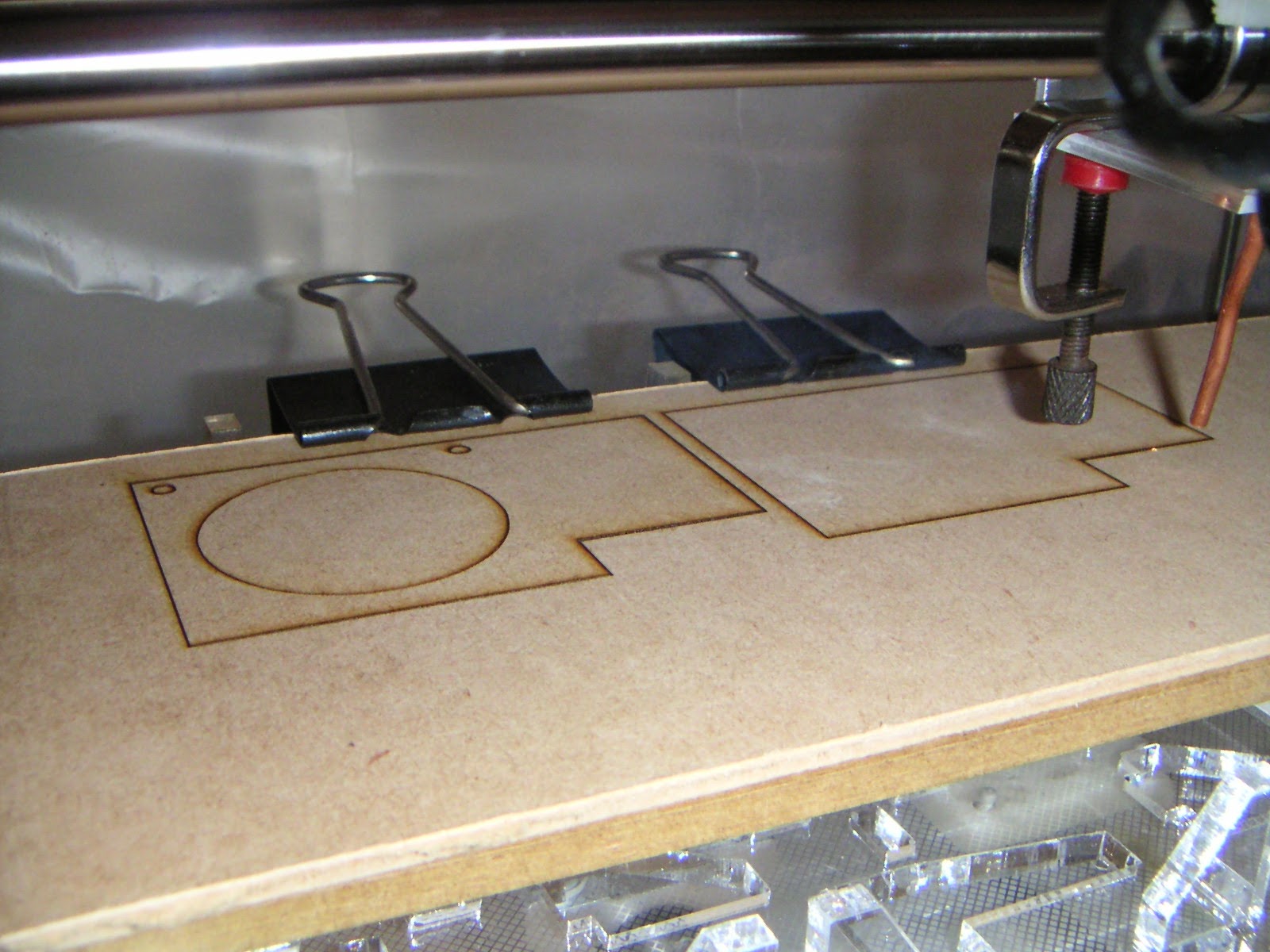
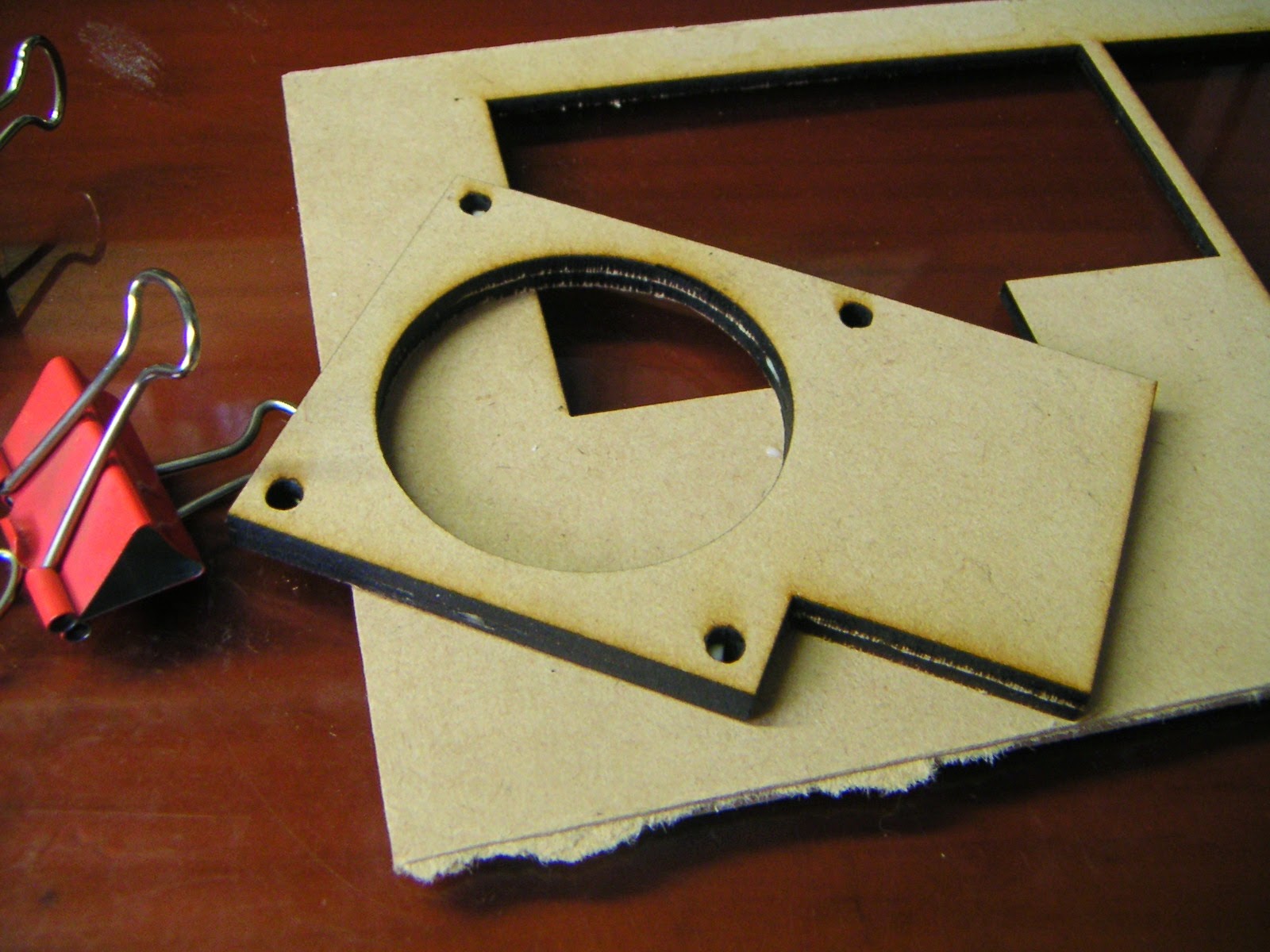
続いて、モータを保持するための板材を作ります。
これはプリントでは強度に不安がありますので、MDFをレーザカッターで切って作ることにします。
プリントしたベアリングホルダを冷やします。
きれいにプリントが出来ています。すばらしい。
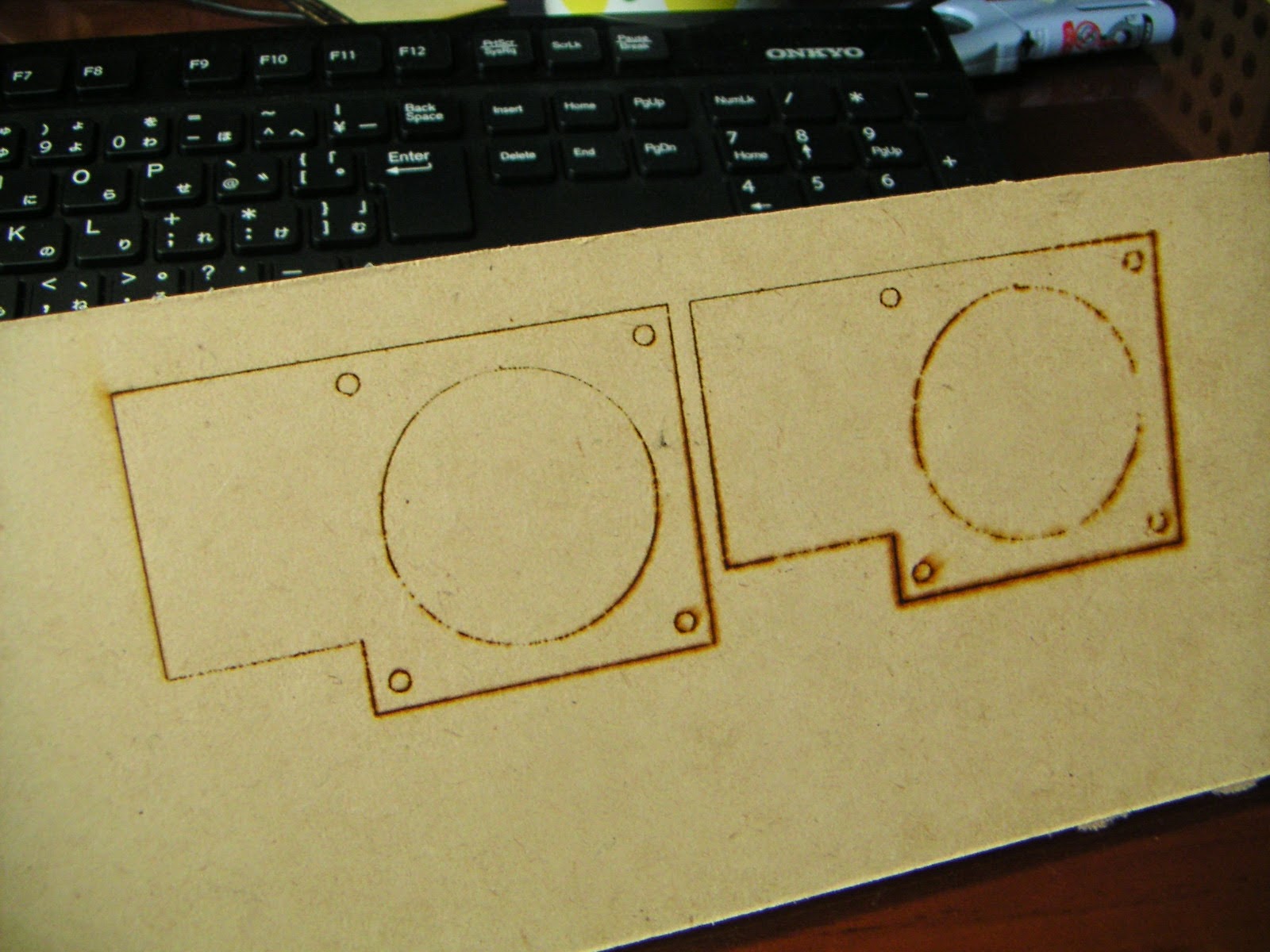
板の切り出しも終わりました。 こちらは表。
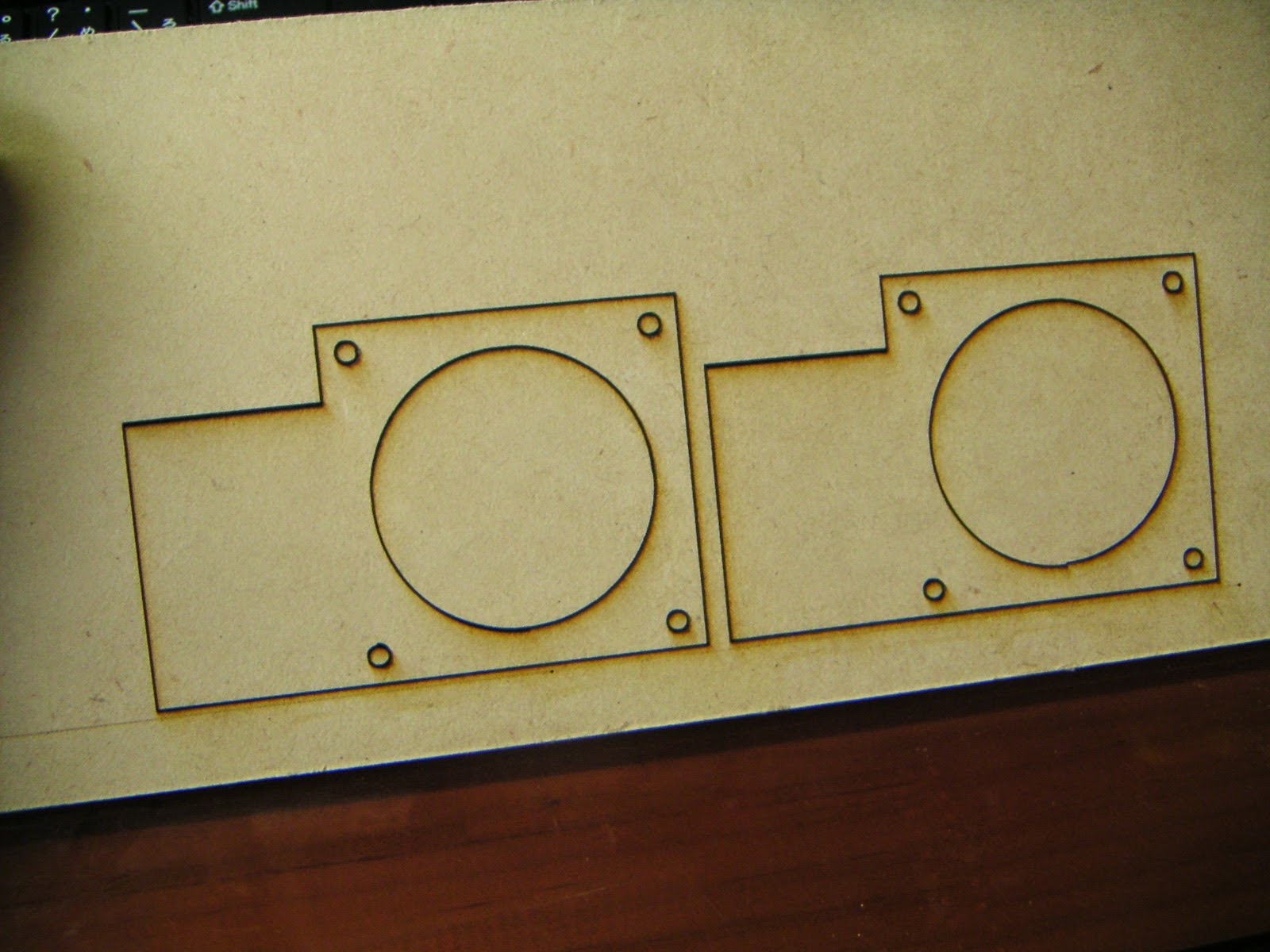
裏。
取り外して、
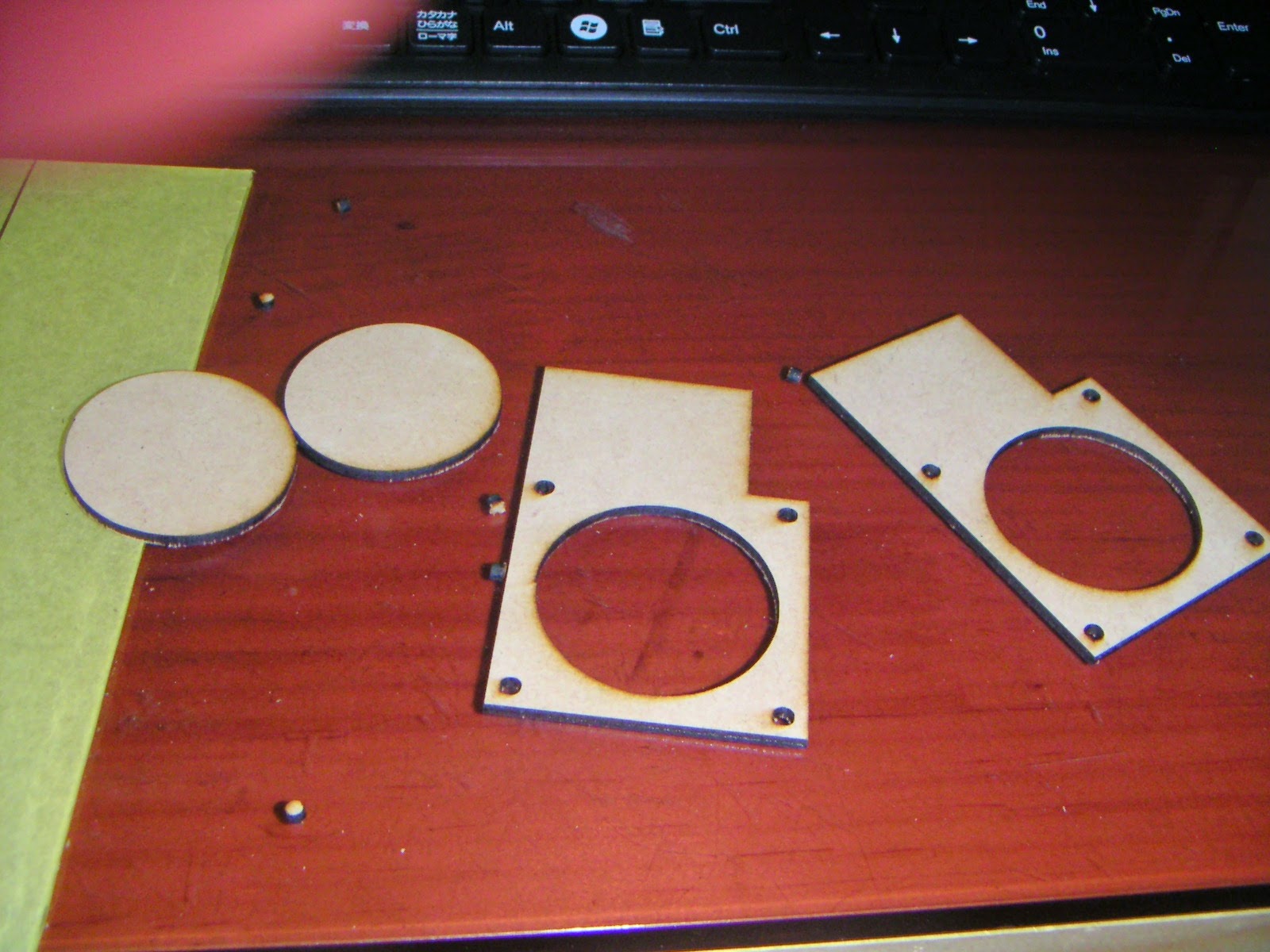
二枚を重ねて木工用ボンドで接着します。
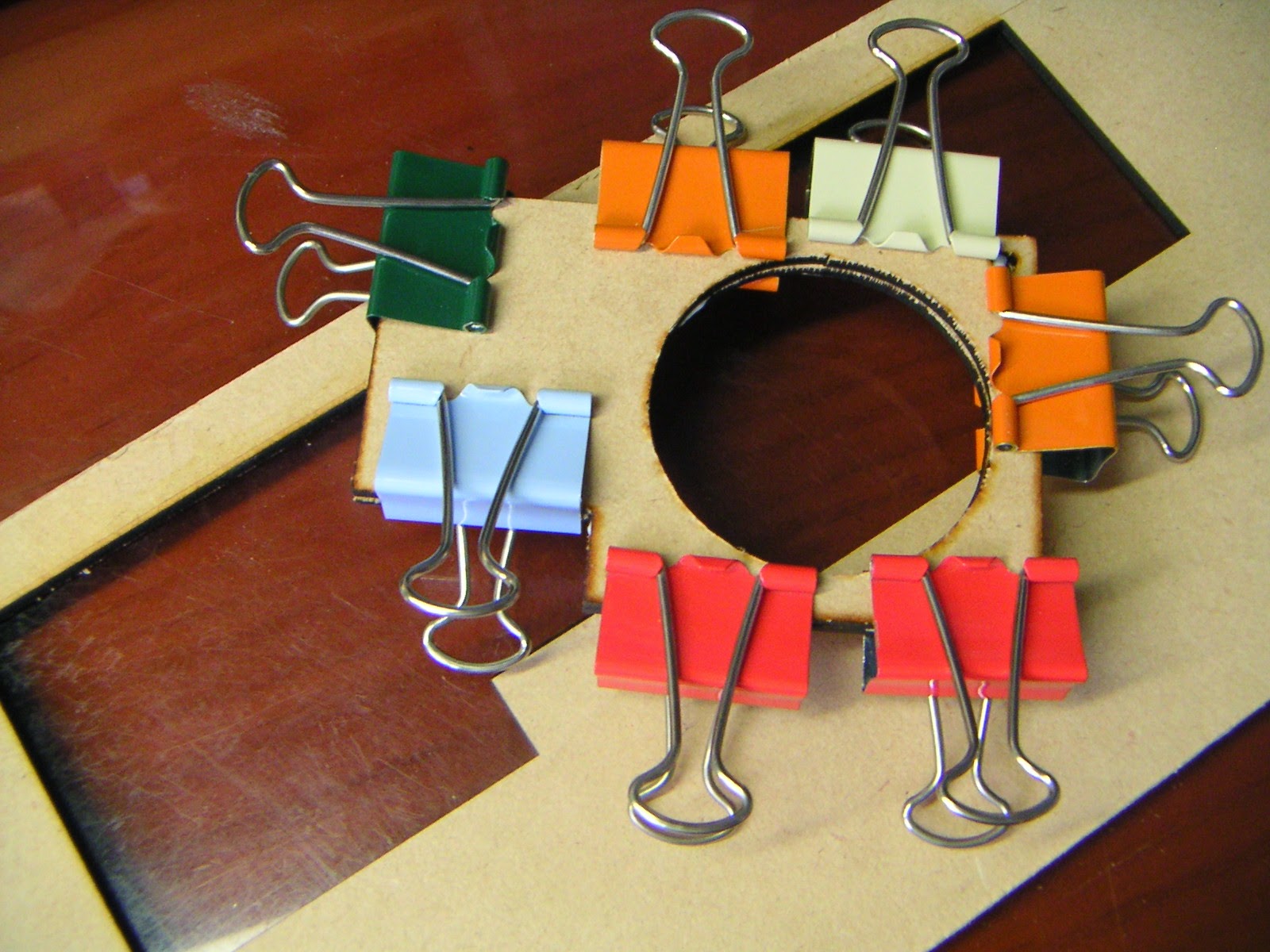
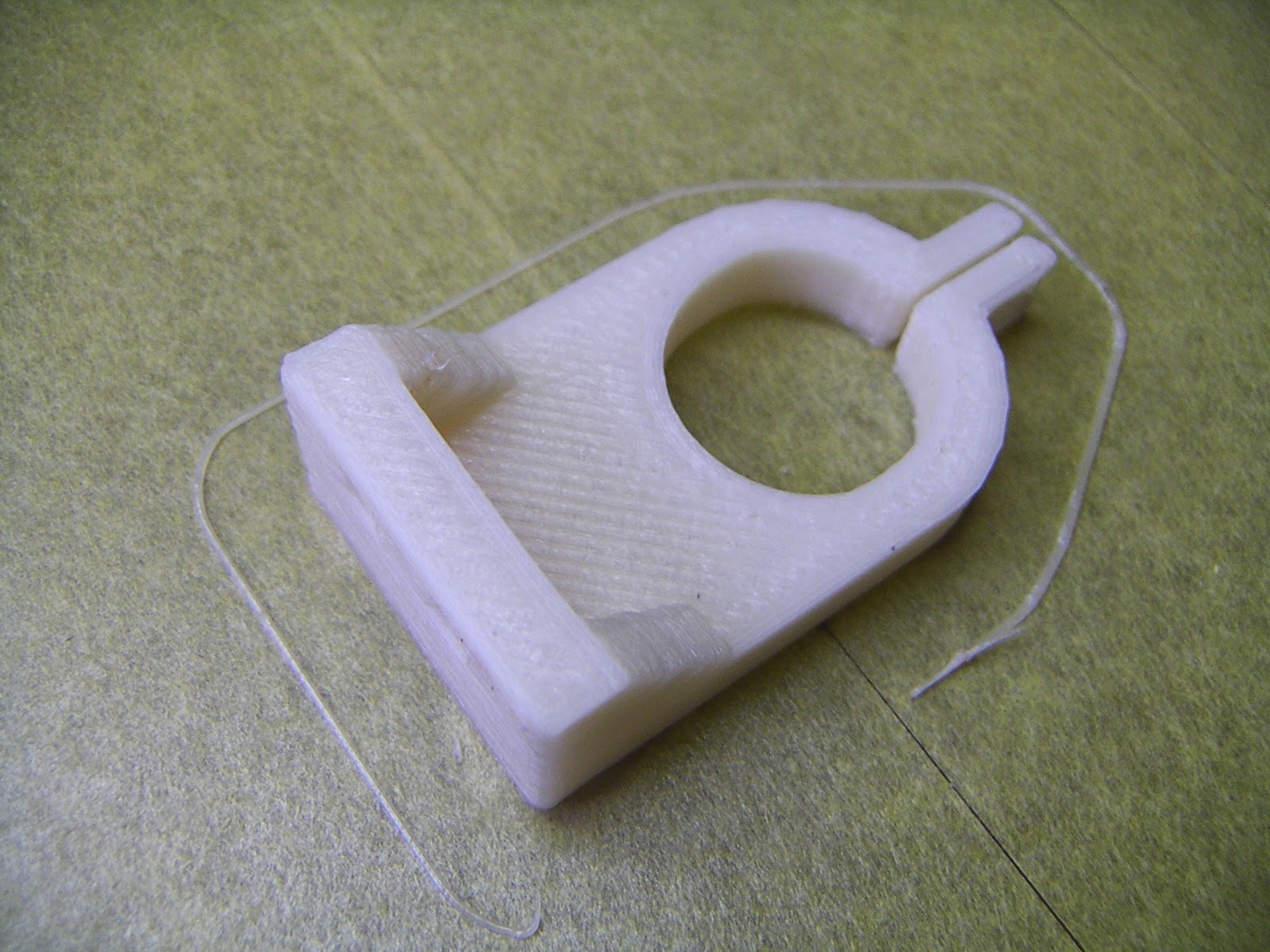
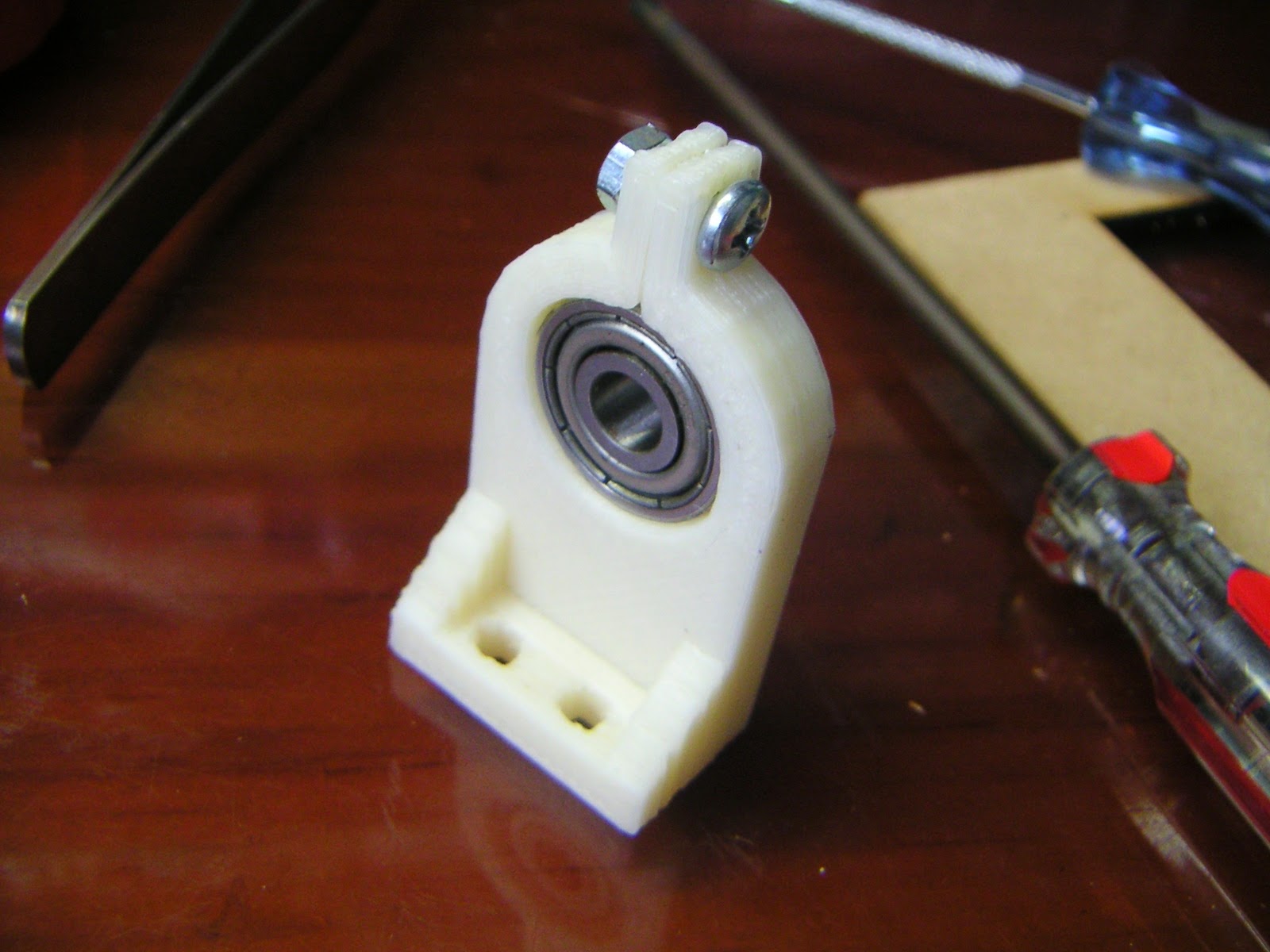
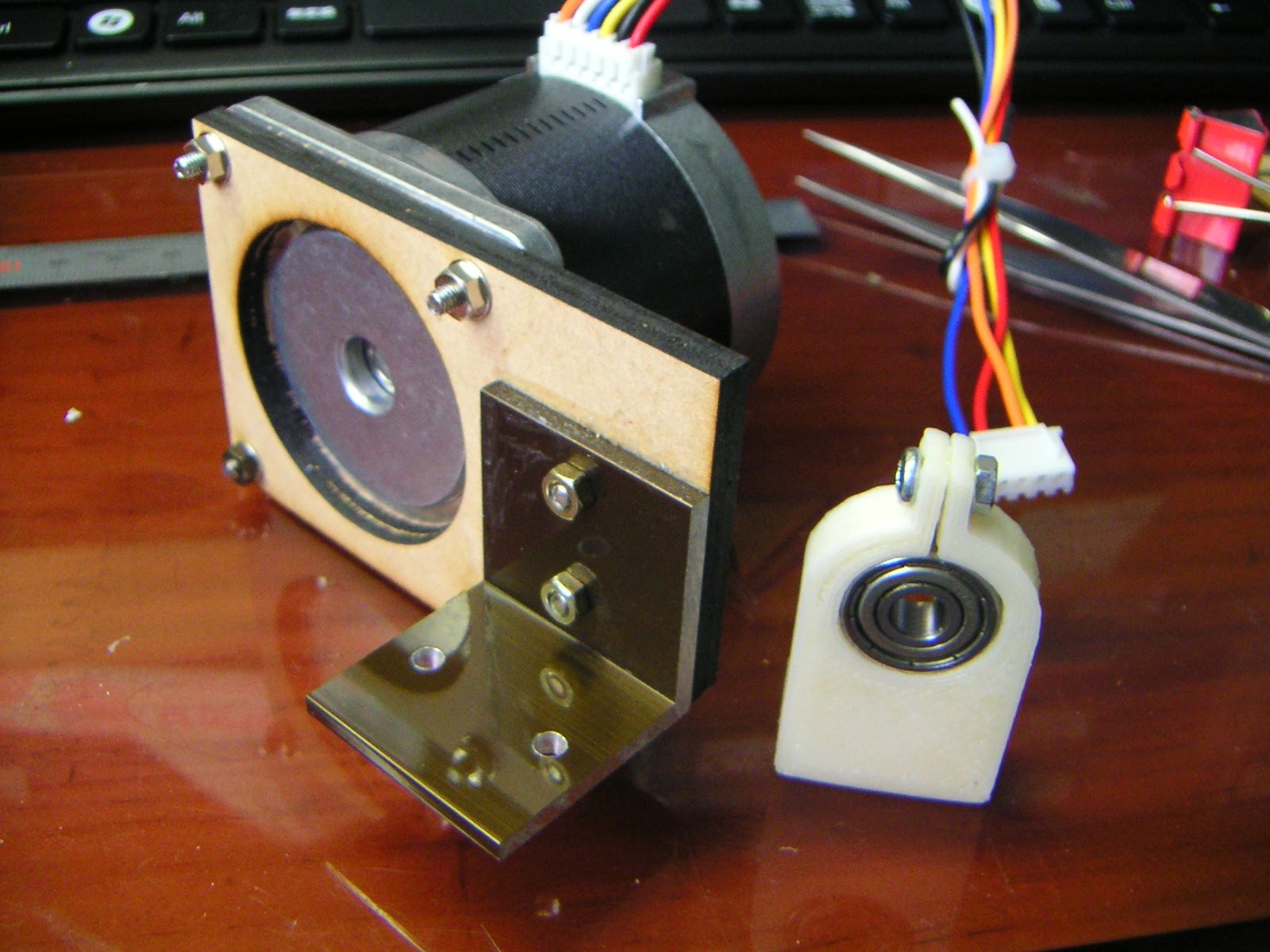
ベアリングホルダを作ります。プリンタのベッドから外して、
ベアリングを入れて、

ねじでとめれば出来上がり。
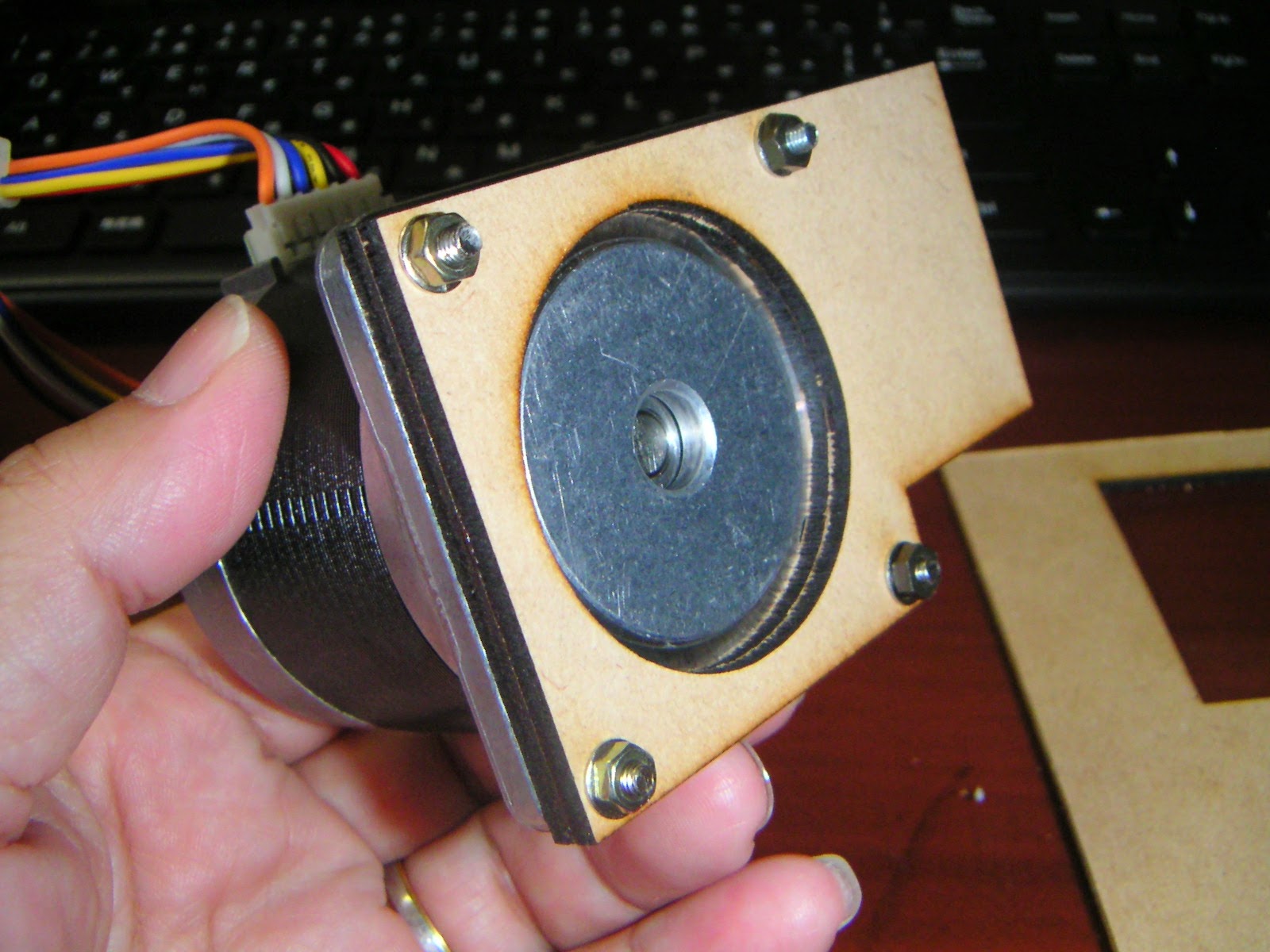
モータの保持板も接着されました。
当たり前ですが、ピッタリです。
ねじ位置もきっちりあっております。
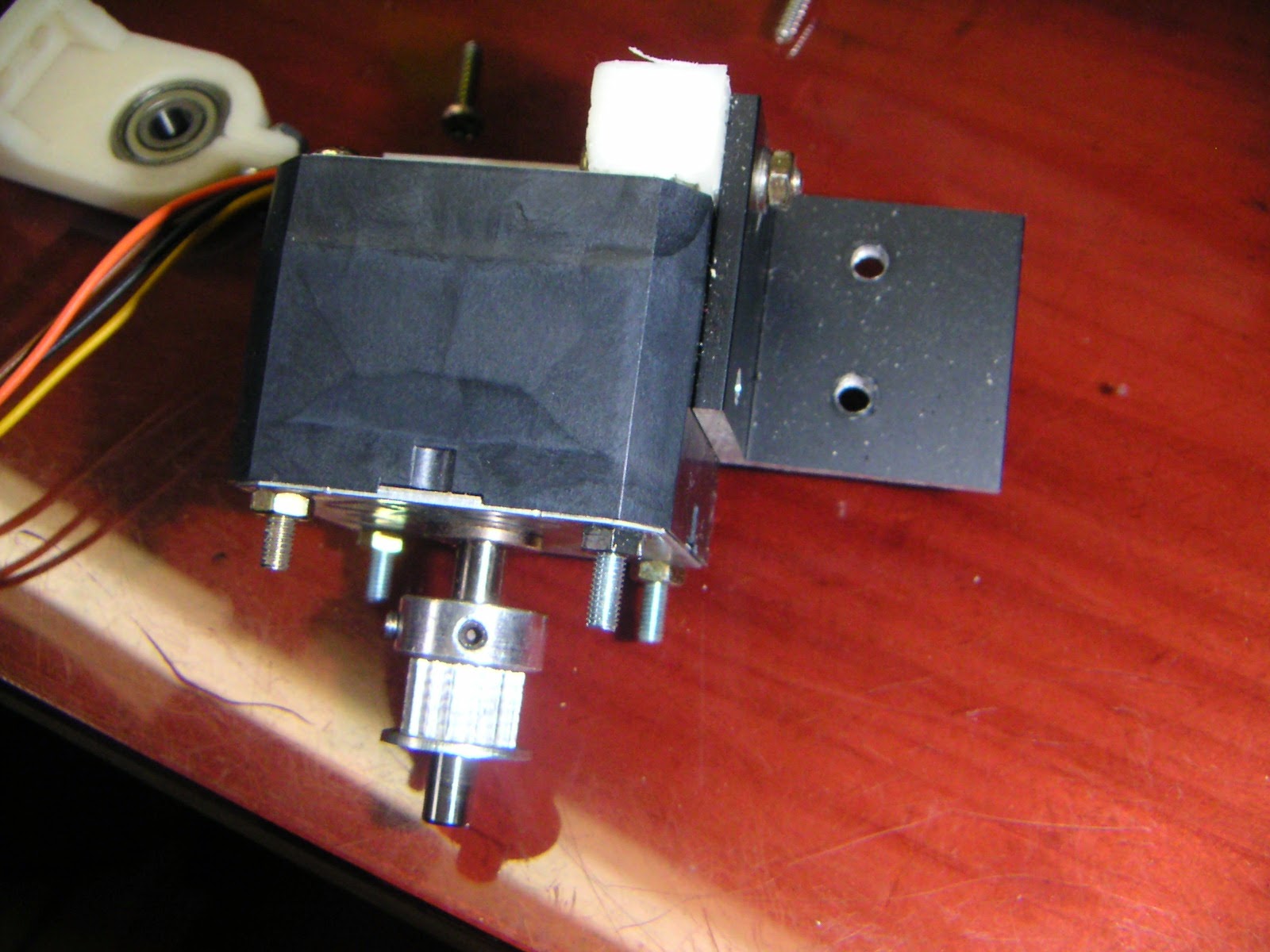
ベースに固定するためのアルミL材を取り付けます。

これで必要な部材はそろいました。
ではモータ交換を行います。
いままで使っていたモータ。こうしてみると小さいです。よく動いてたな。
とりあえずベルトはぷらぷらさせておいて、
モータの取り付け位置をおおよそ決めてベースに穴を開けます。

M3のボルトナットで固定します。片持ちの片持ちで機械的には無理がありますが、びくともしませんので良しとします。
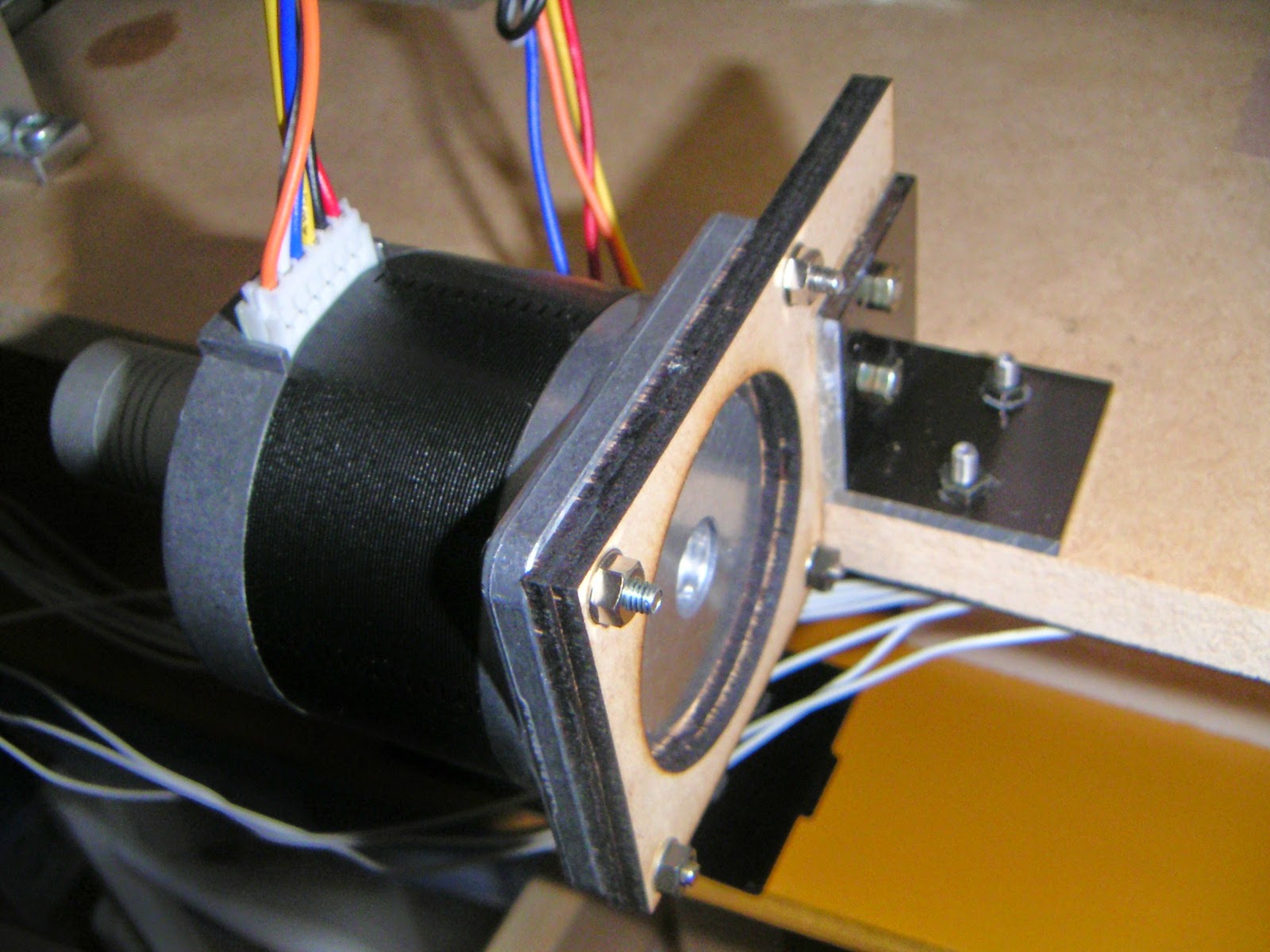
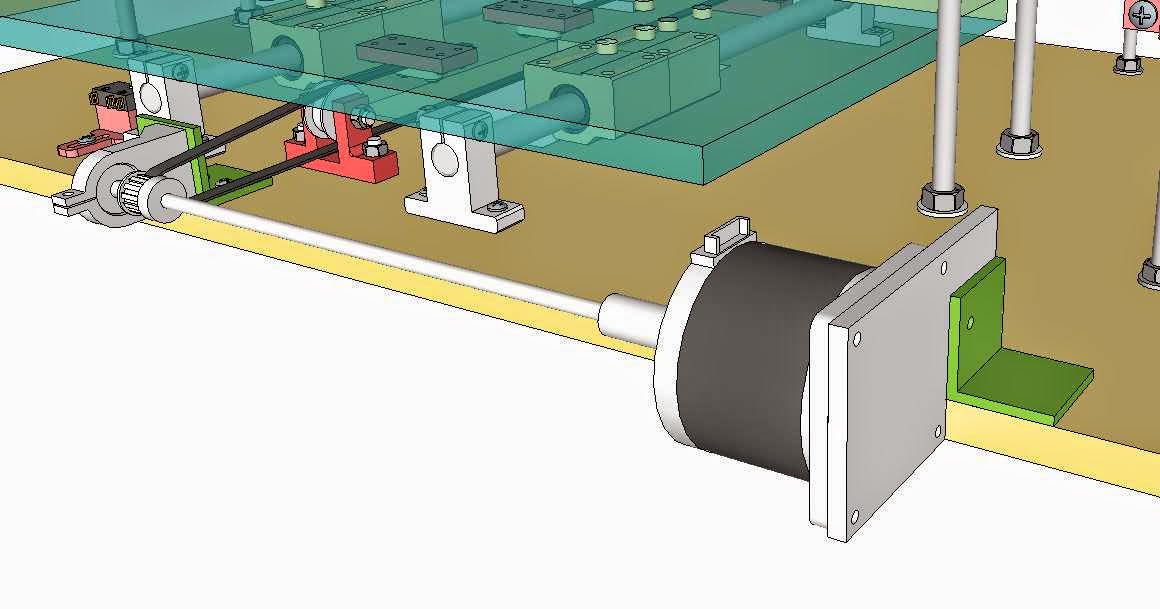
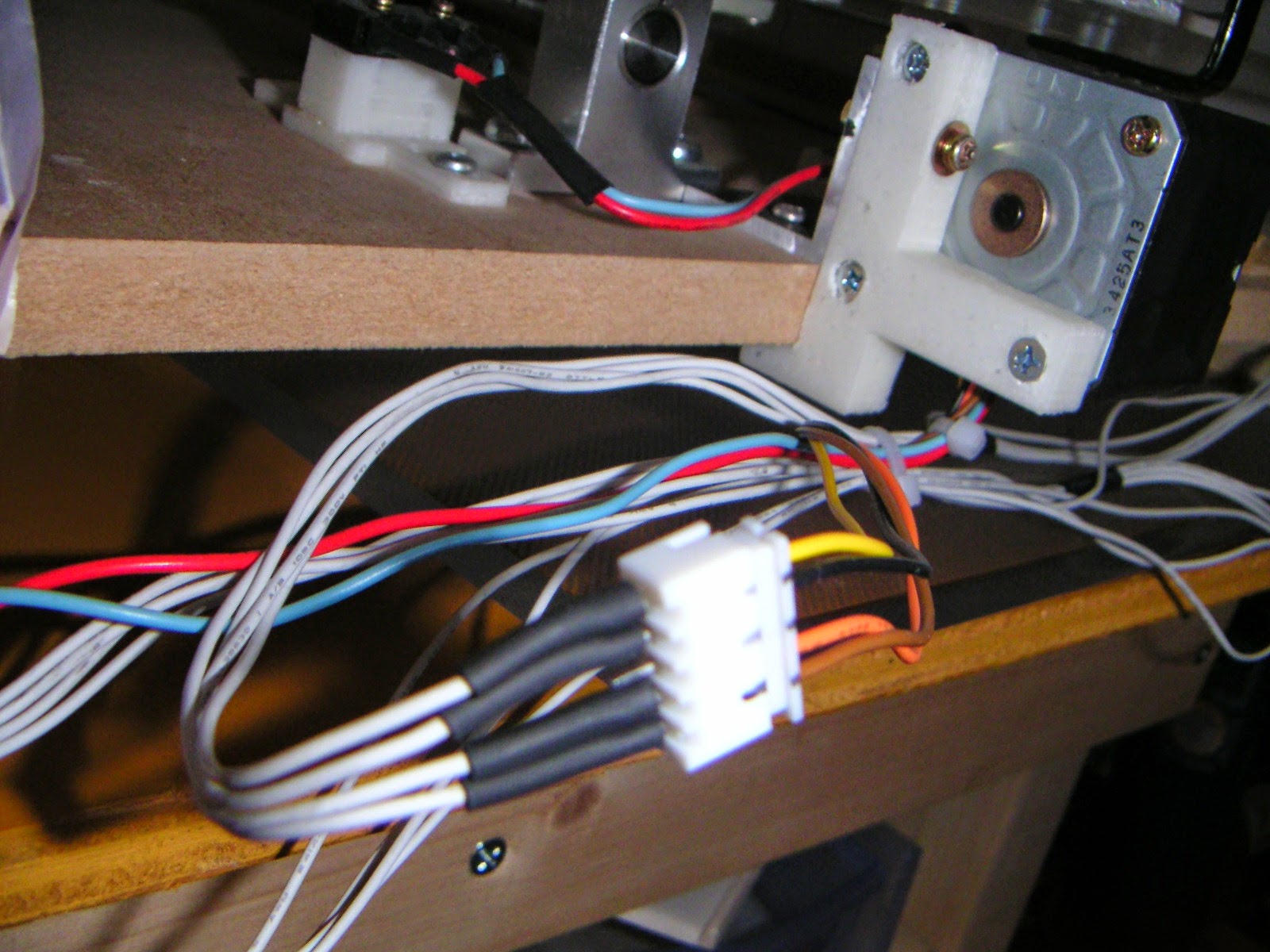
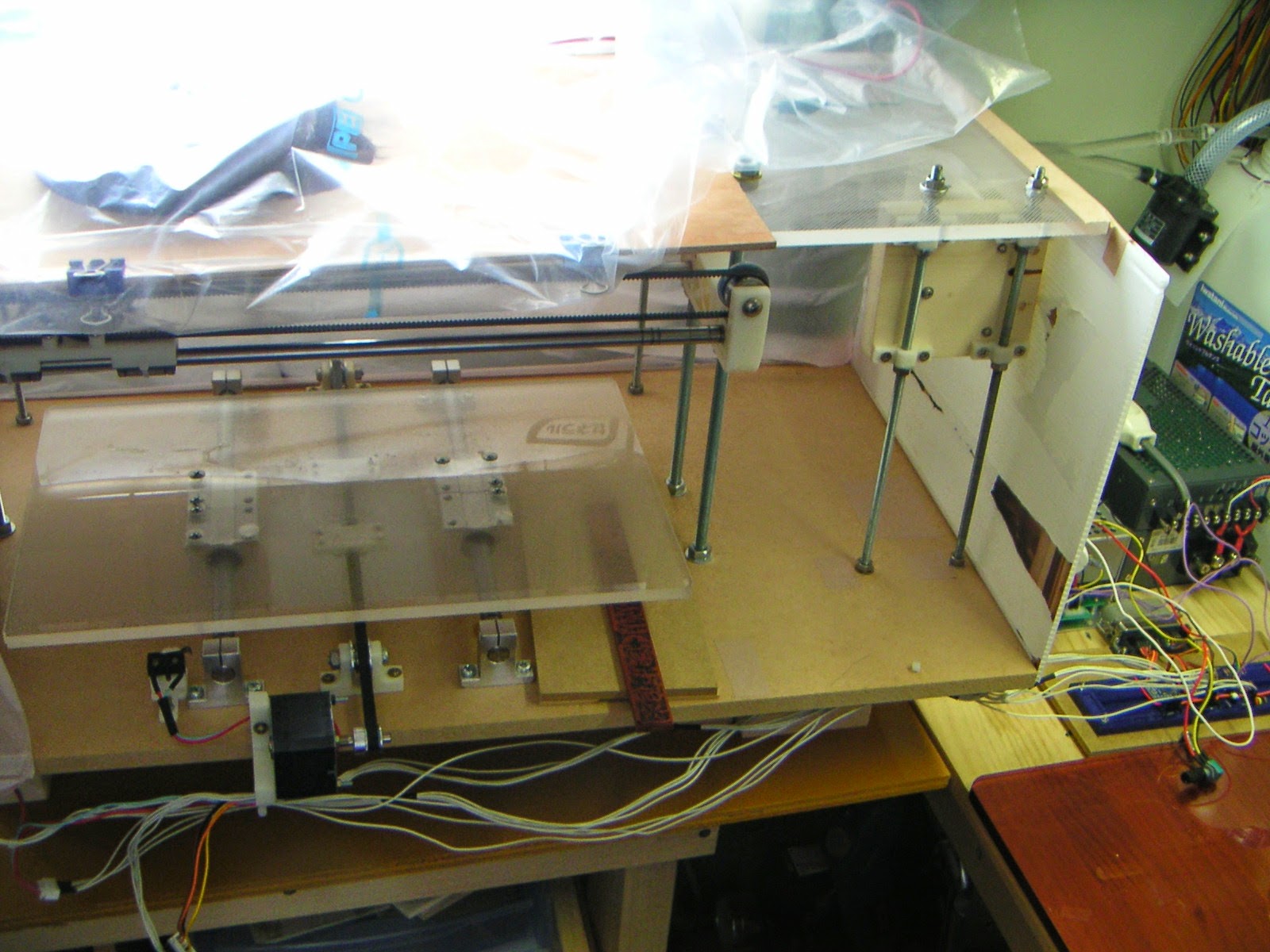
こんな位置につけました。これでY軸ステージが手前に動いてきてもモータとぶつかることはありません。
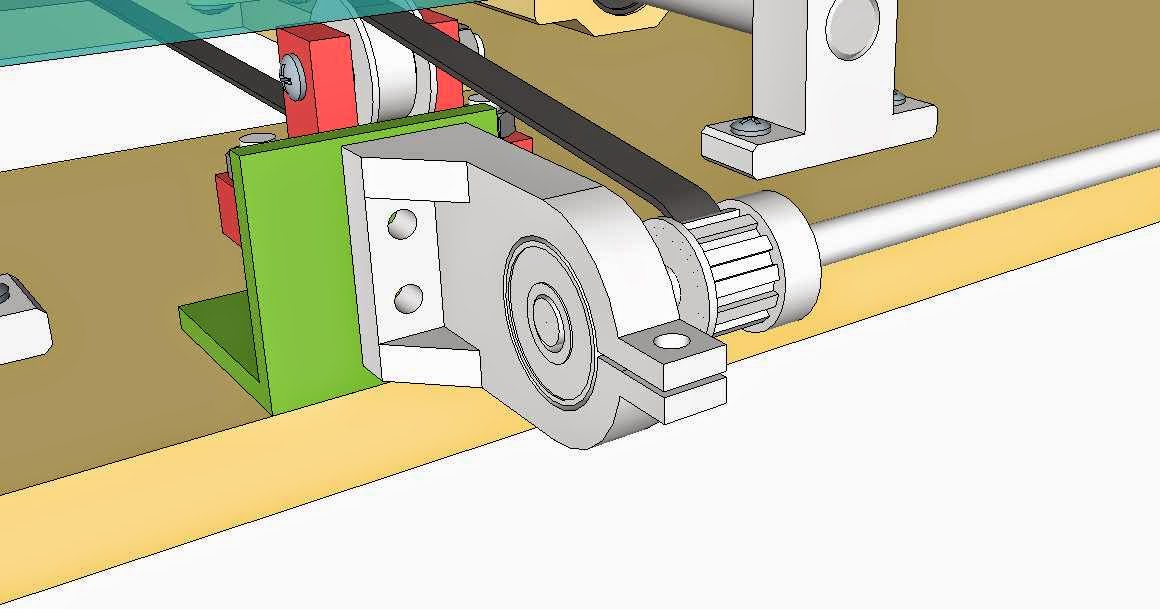
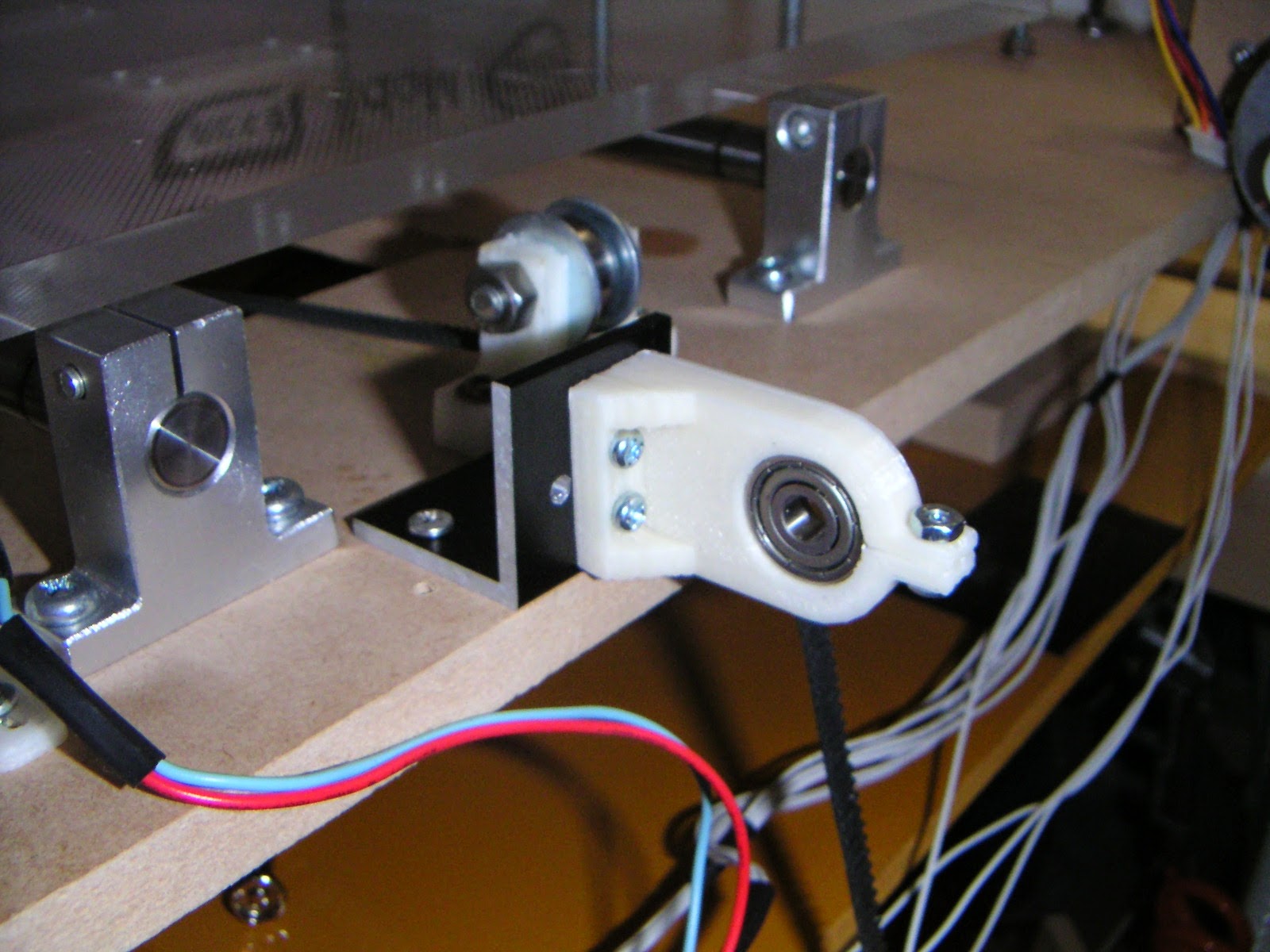
ベアリングホルダにもアルミL材をボルト止めし、
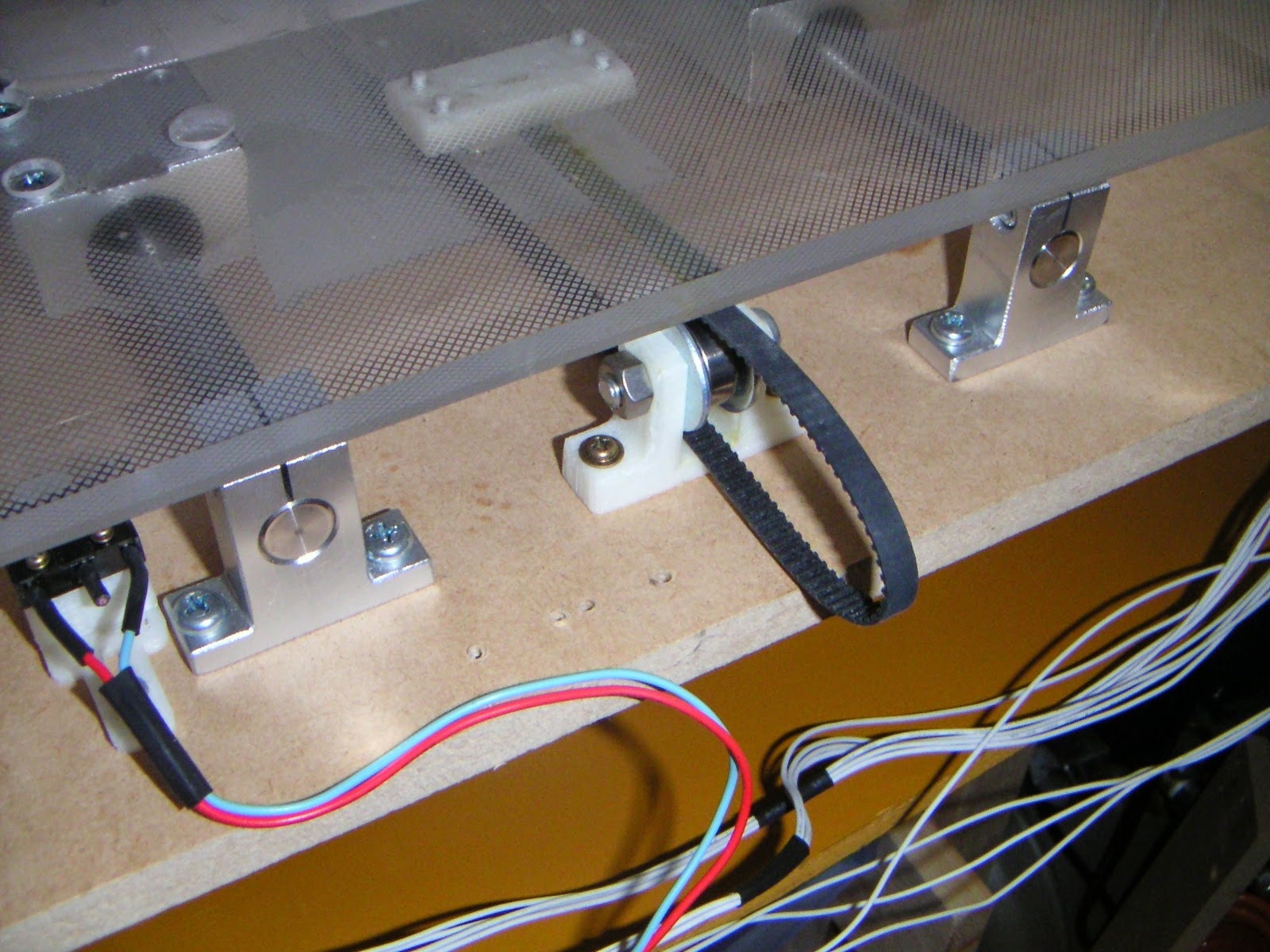
位置を見ながらベースに固定します。
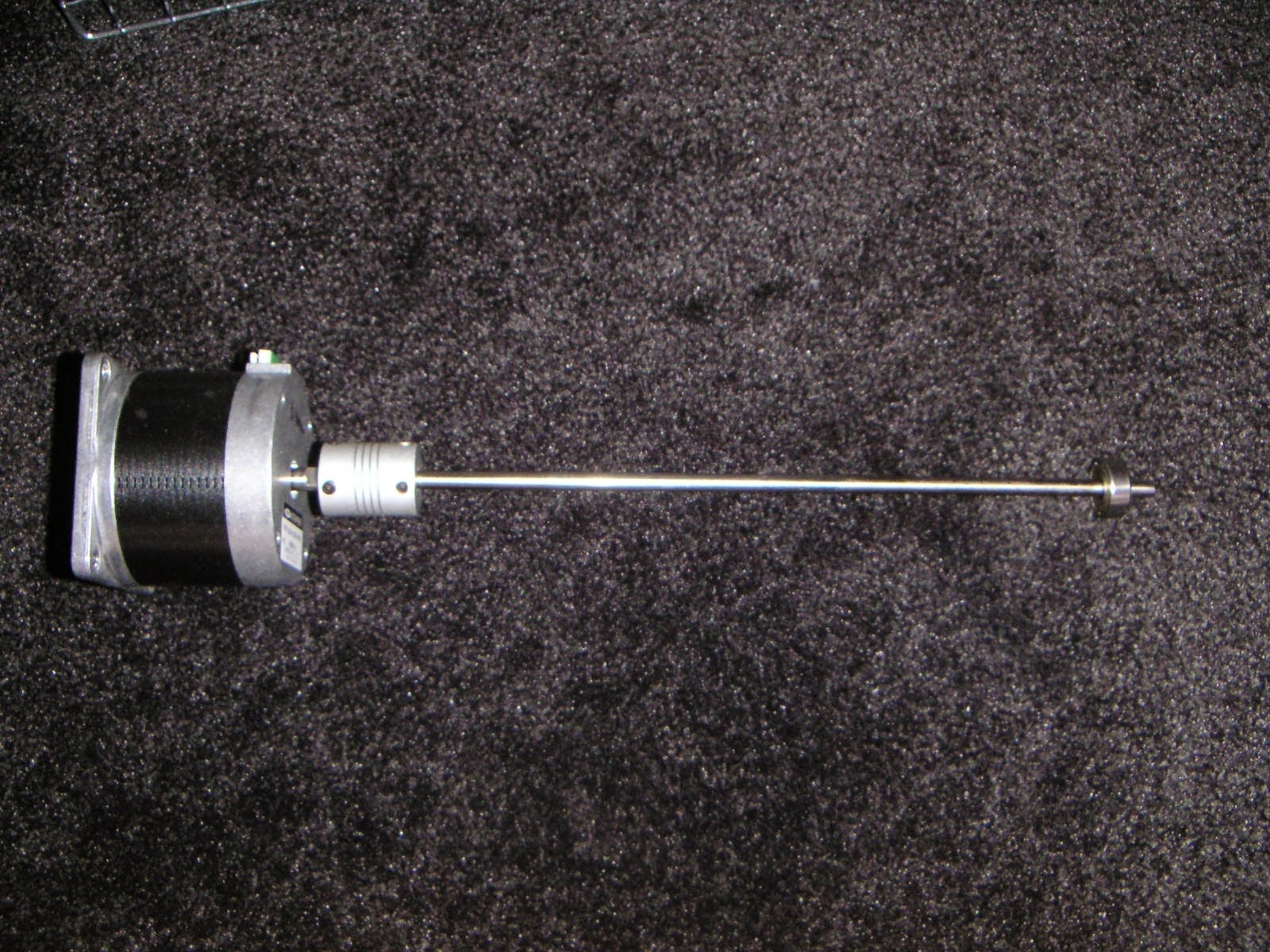
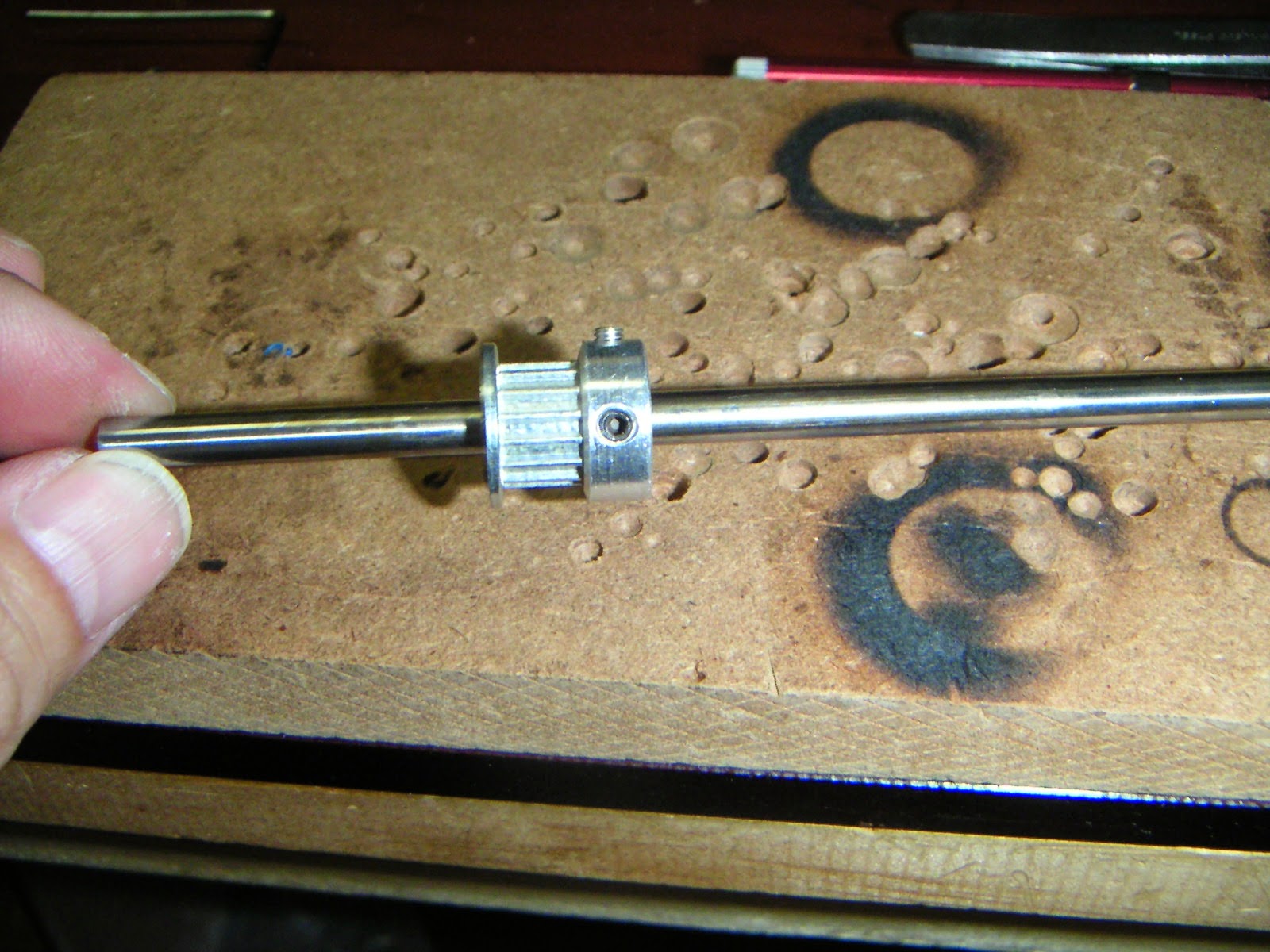
CANONの小型スキャナから取り出した5mmφのシャフトを使います。
これにベルトプーリーを仮止めして、
ベアリングに持たせながらベルトをかけます。
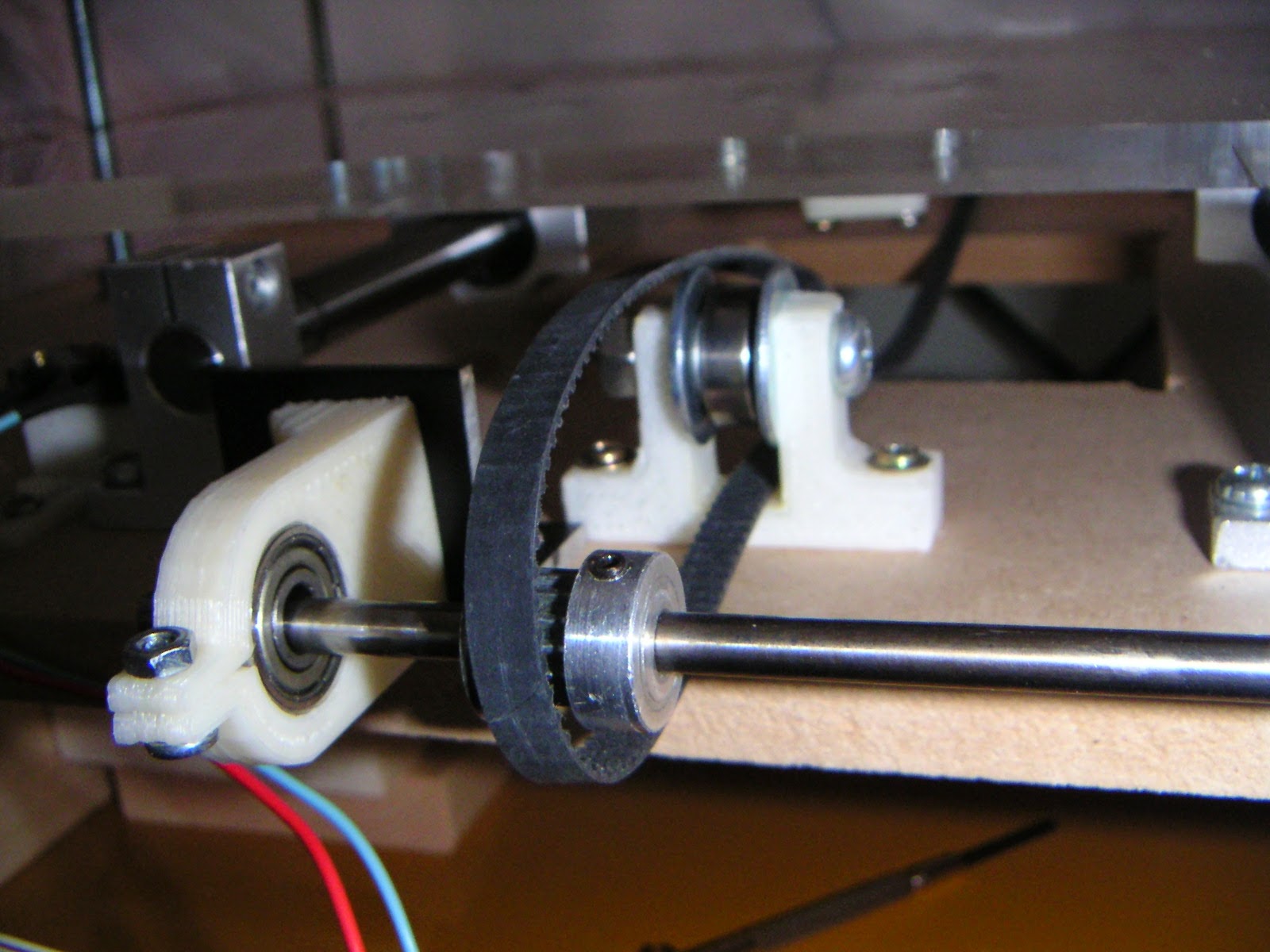
モータ側はフレキシブルカップリングを使います。
ベルトを締めこんでプーリーの位置を調整して本締めします。
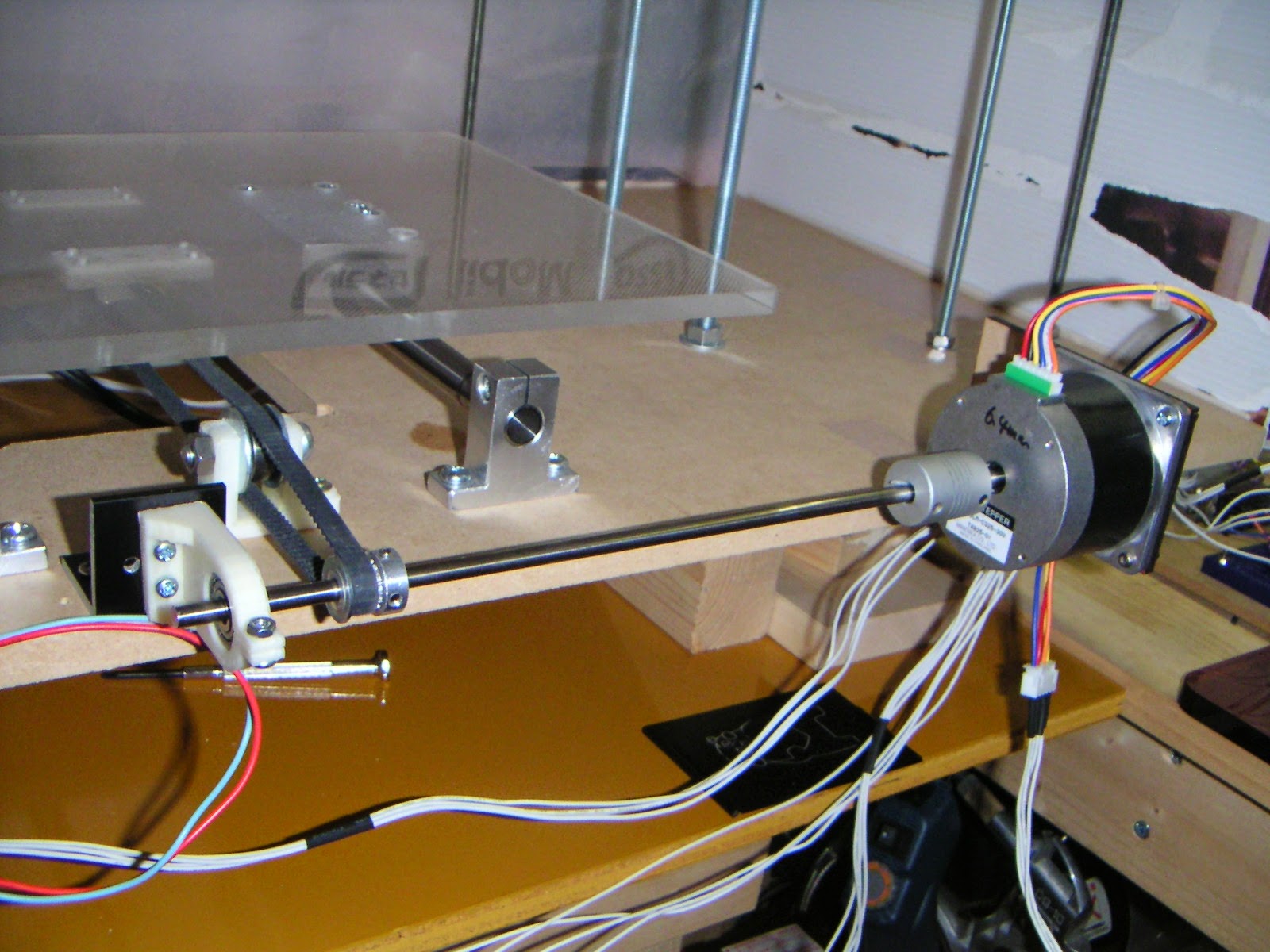
これで完成。
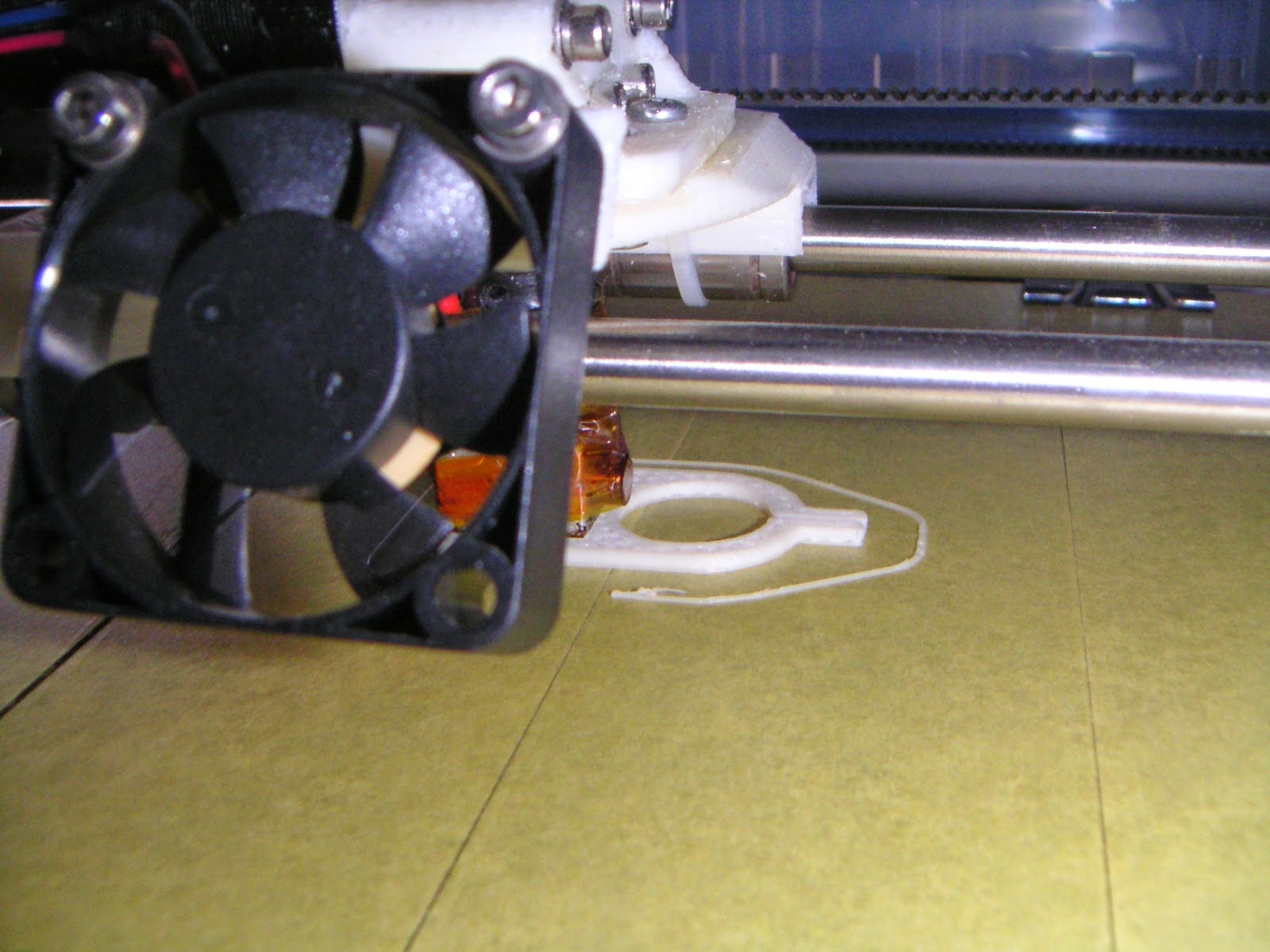
動かしてみます。
これは力強い。少々手でいじめてもまったく問題無しです。無理するとベルトが歯飛びを起こしそうです。これはよいです。
日曜日の朝に急に思い立って、交換完了して動作確認したのが13時でした。
設計、3Dプリント、レーザーカット、組み付けで5時間くらいです。まったくもってすばらしいです。一昔前ならこんなこと考えることも出来ませんでしたよね。3Dプリンタ&レーザカッター様様です。
買ってよかった3Dプリンタ。作ってよかったレーザカッター。