
ダメダメなグラインダからモータの積み替えを検討します。
が、ここで問題が。
みら太な日々でモータと言えばステッピングモータであります。これまでたくさんのステッピングモータ、モータドライバ等をいじって楽しんできましたが、それ以外の種類のモータとなるとほとんど経験が無いのであります。ごく一部でDCモータ(いわゆるマブチモータ)やくまどりモータ、AC誘導モータを使ってきたくらいかな。
ということで、そもそもステッピングモータ以外のモータをほとんど持っておりませんのでとりあえずおもちゃ箱や倉庫のわけが分からない未分類箱からモータを引っ張り出すことから始めました。
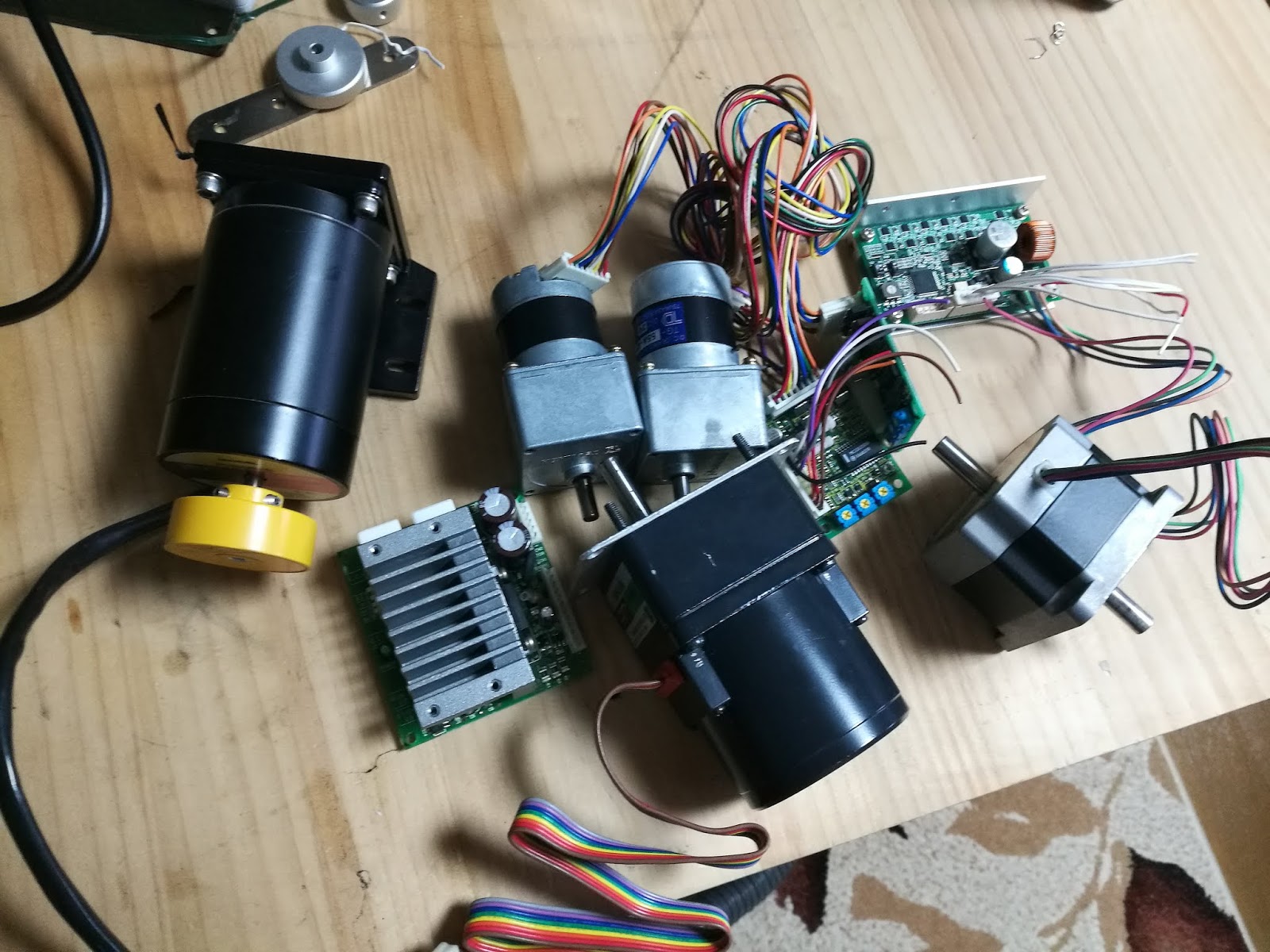
で、出てきたもの。
まずACサーボモータ(笑 いやこんなちゃんとしたモータ要らんし。小さいし。

そもそも大型のモータが無いですね。小さいやつでは絶対にトルクが足りんのです。
ほかに手あたり次第持ってきてみると、でかめのやつがちらほら。
これはでかくてちゃんとしてそう、と思ったらステッピングモータでした(笑
しかもVEXTAの5相

これは…これもステッピングモータ(笑 しかも5相
5相なんで使いにくくておもちゃ箱に放り込まれてたんですね。

残りを見てみると….
を?
を?
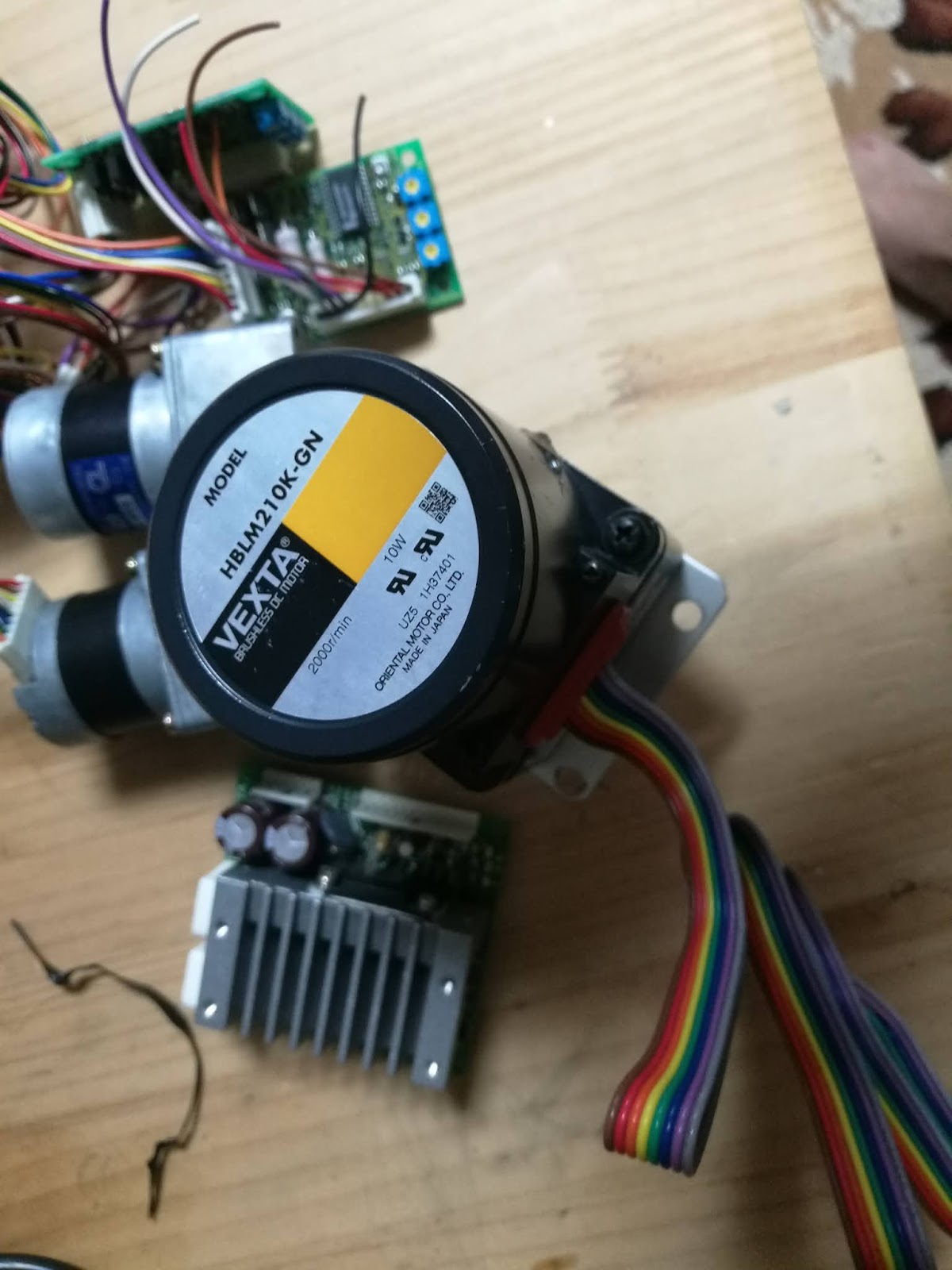
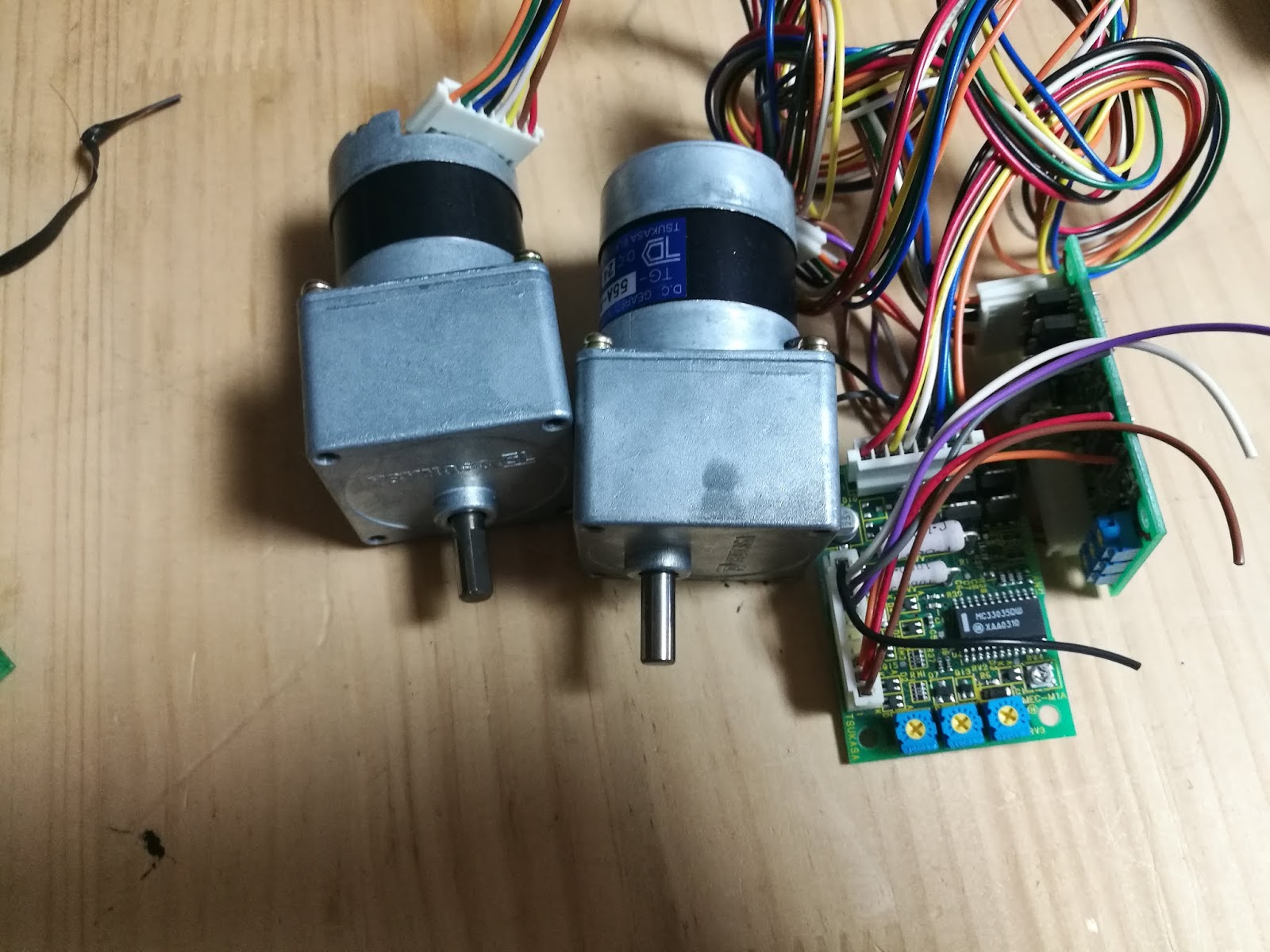
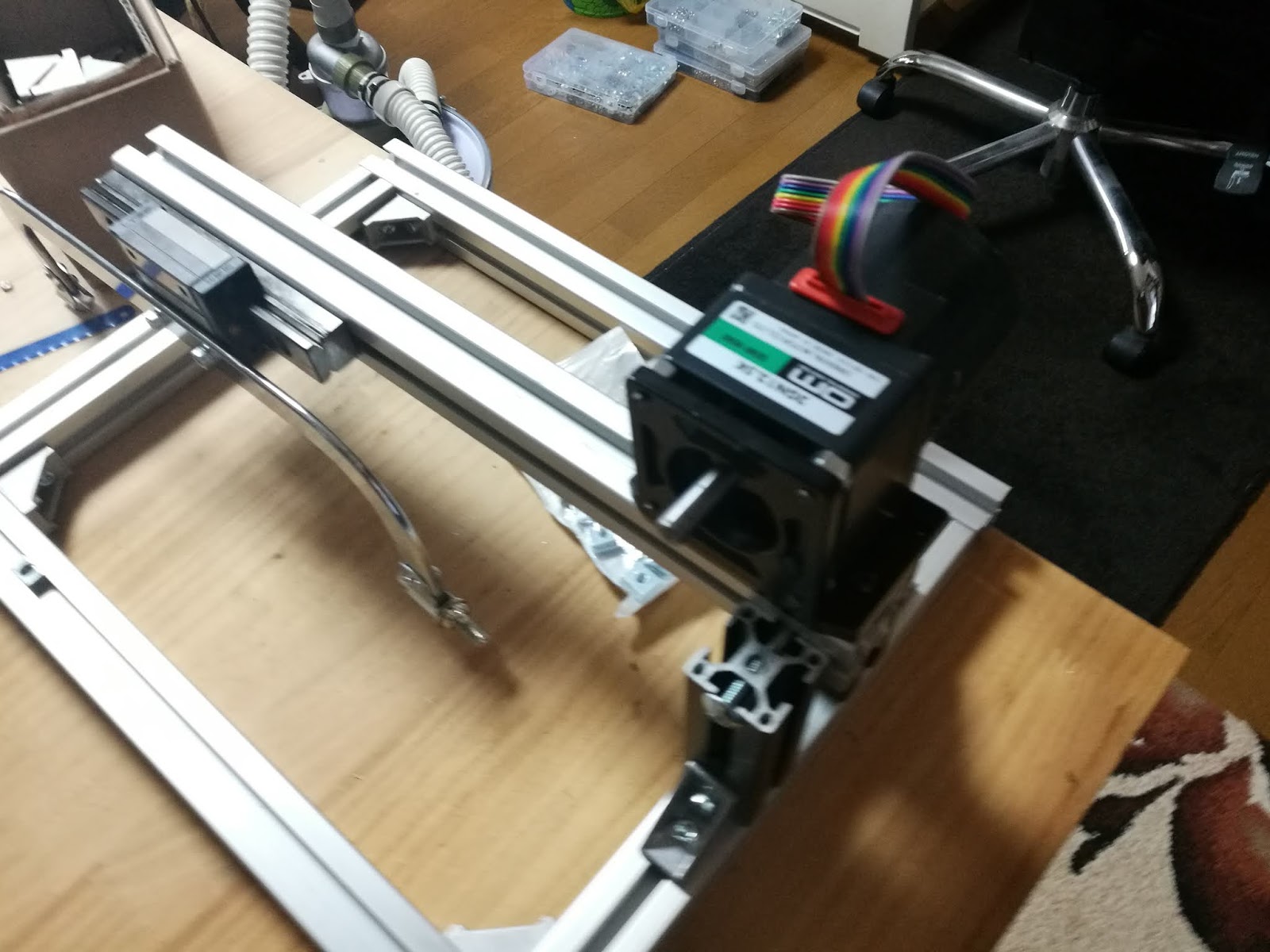
こいつらギアードモータじゃやないですか。そしてモータ自体はDCブラシレスです。
ギアードであるということは回転数が低い代わりにトルクがバカでかいはずなのでレシプロソーにはうってつけであります。
特にこ奴。でかいしギアードだしモータドライバもあります。このあたりが使えるんじゃないですか?
DCブラシレスとか触ったことないのでドライバがないと回せる気がしませんが、基板はちゃんとしてそうなので、接続情報さえあればなんとかなるかも。

ということでよくよく見てみます。
まずモータ本体はこれ。

ドライバ基板はこれ。


ということで、これでトライすることに決定します。
必要なものを集めましょう。電源は24Vなので、まずはその電源。写真が逆ですみません。


ロジックには5Vが必要ということなので、24Vをこのちっちゃなモジュールでダウンコンバートすることにします。
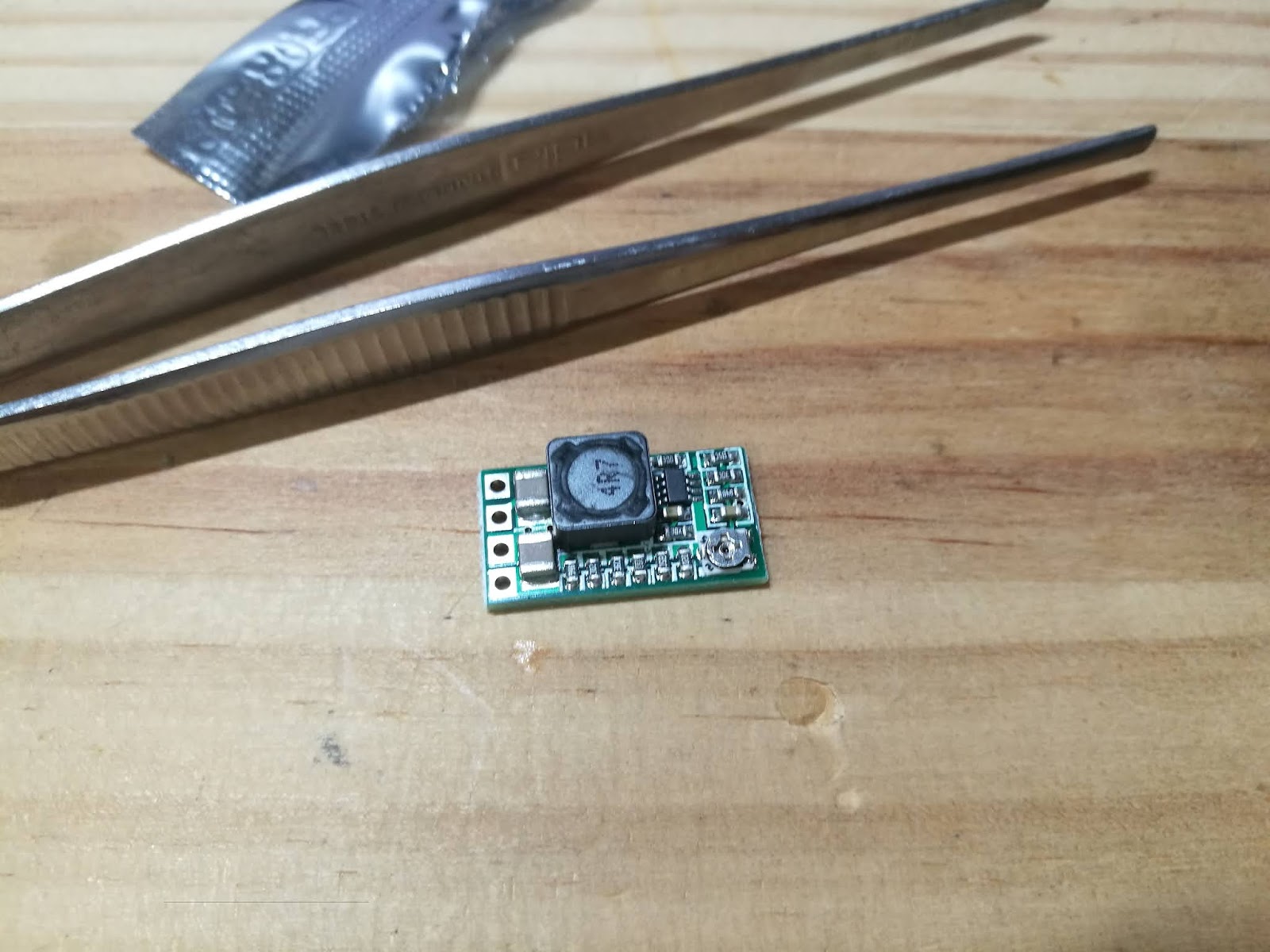
このモジュールちっちゃいのに役に立ちます。最大24Vを1.8Vから自由に設定してダウンコンバートできます。
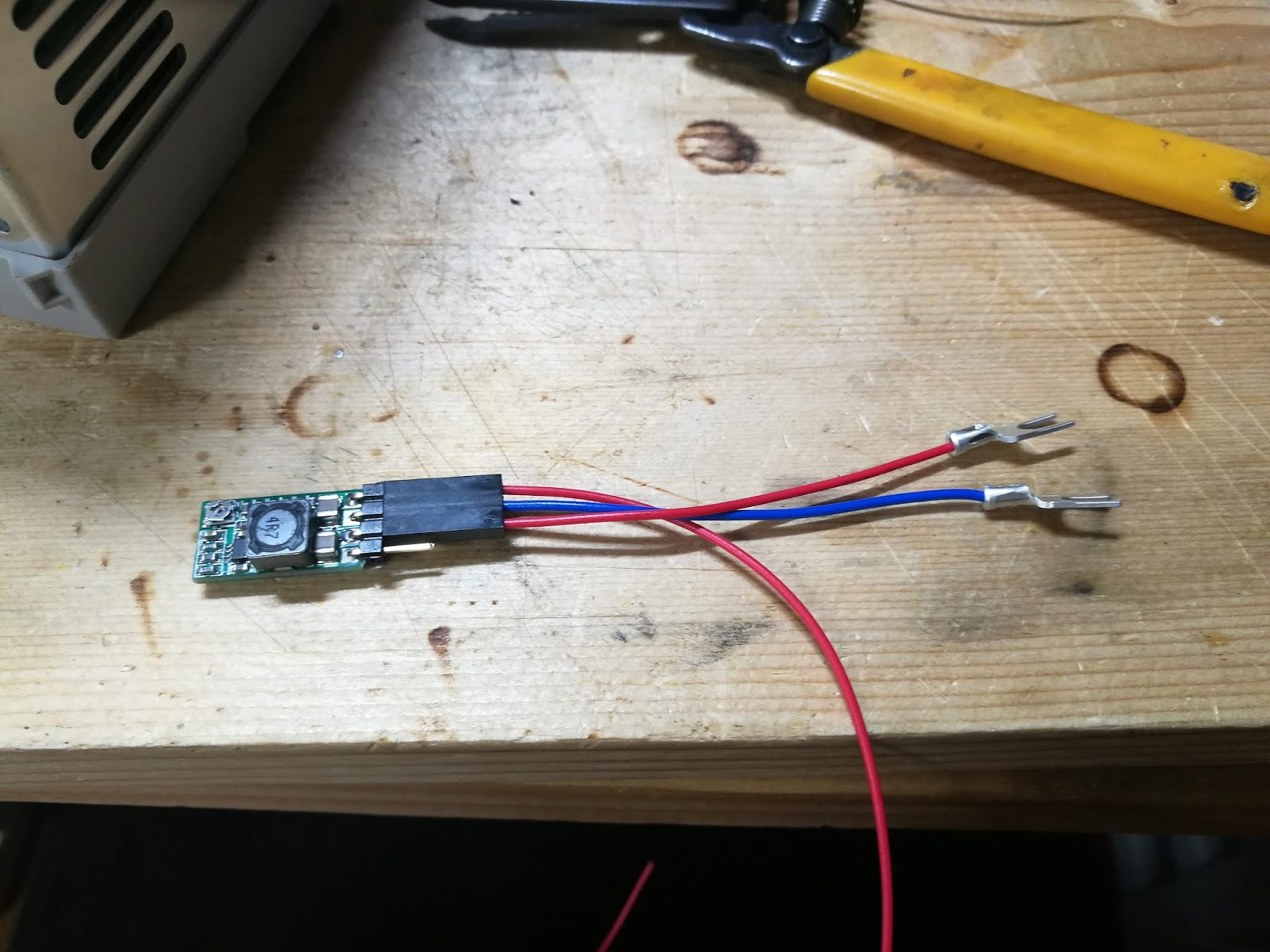
これです。

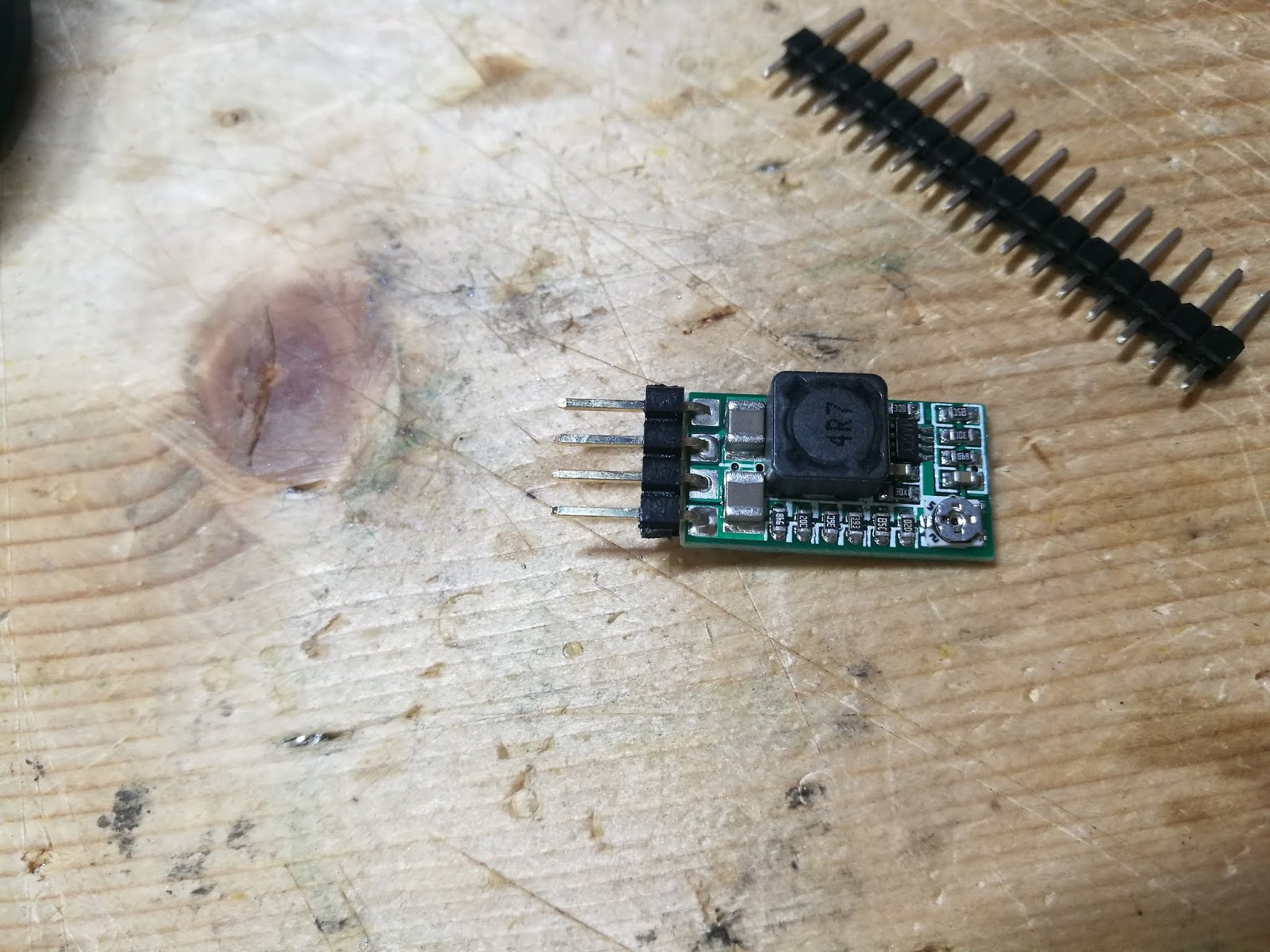
とりあえず電源近くにぶら下げられるようにピンヘッダハンダ付けしておきます。
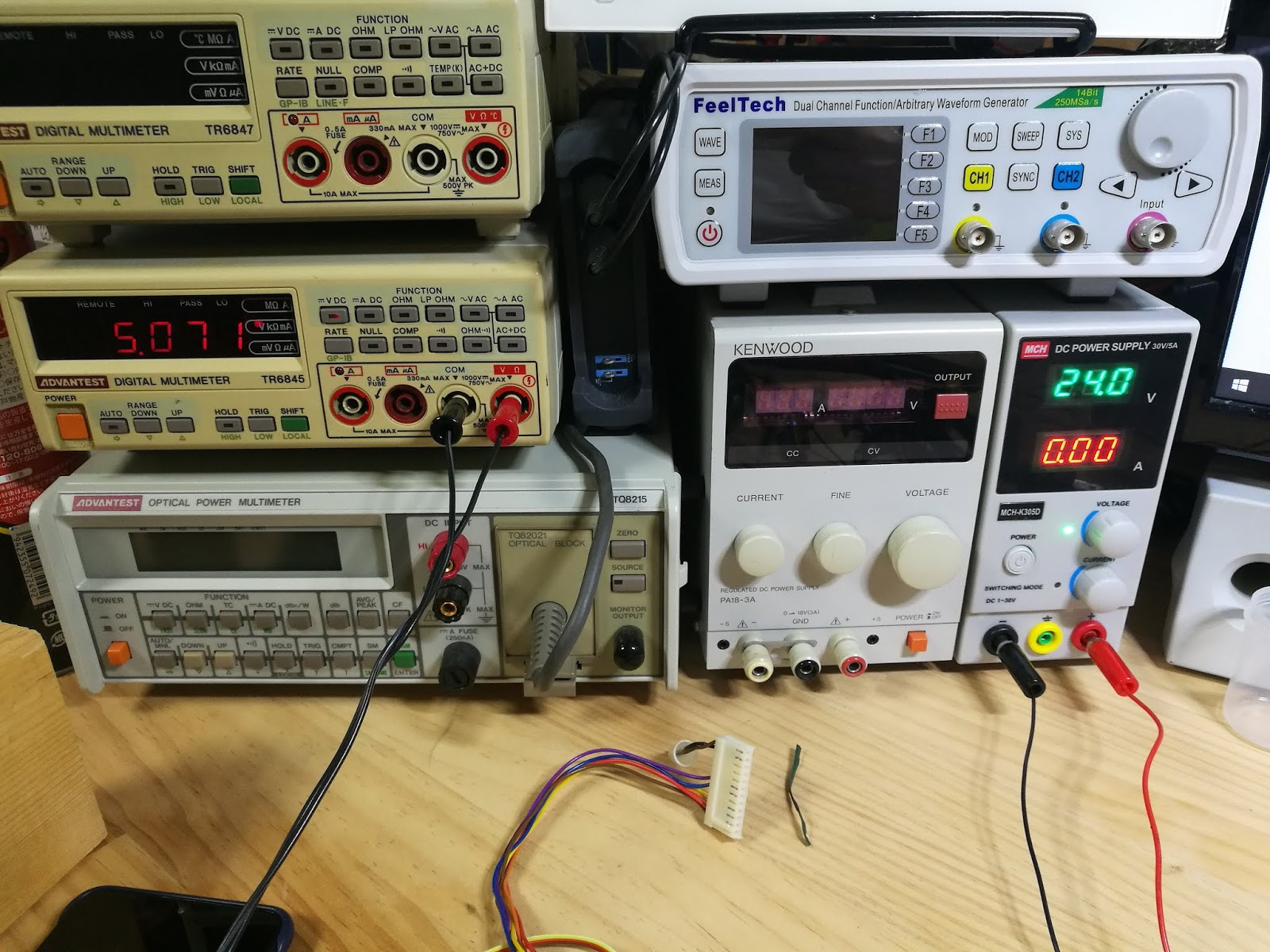
テストしてみましょう。
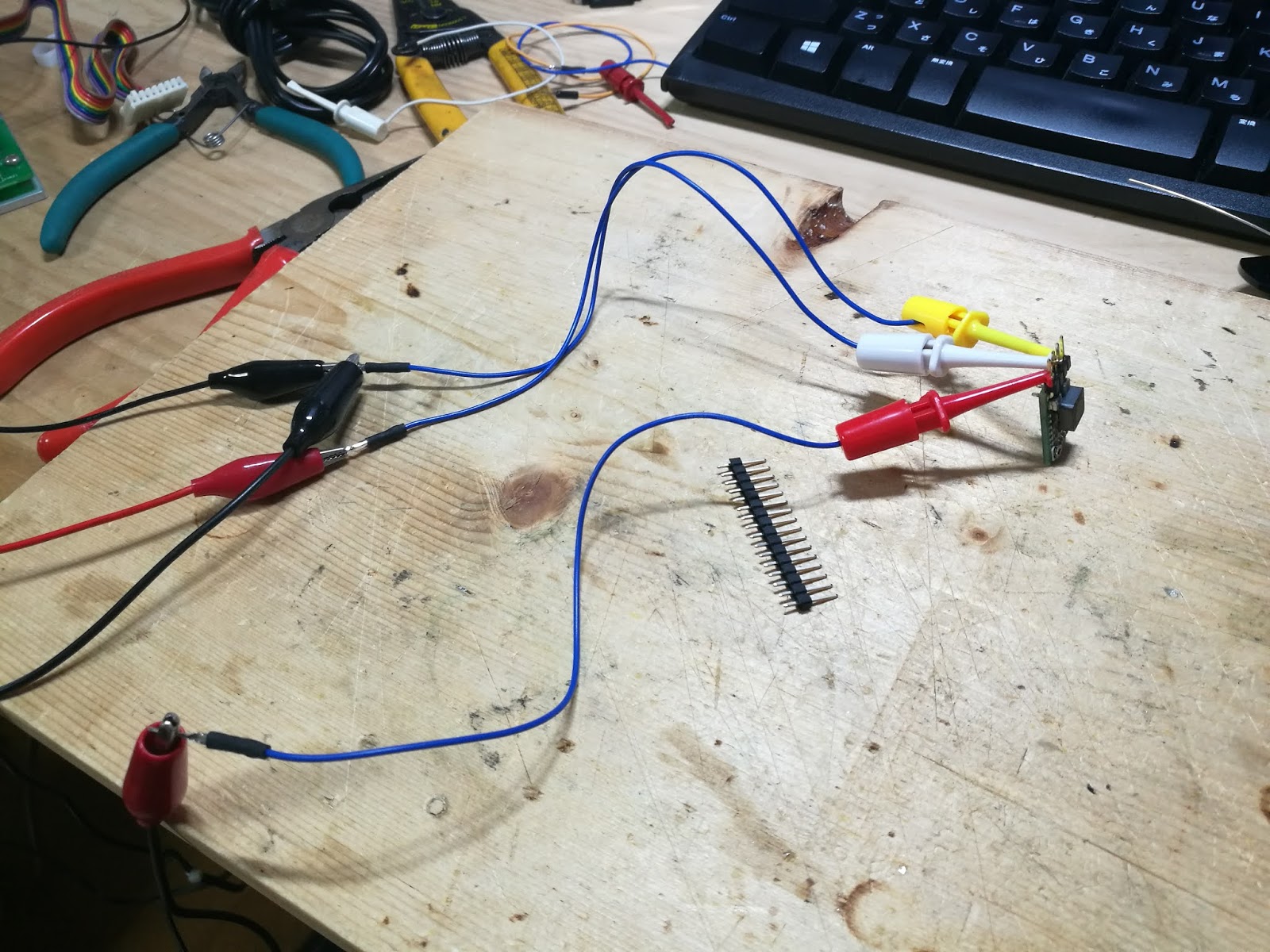
24V(右下の電源)入れたら5V出力(左中央のマルチメータ)しています。
ちなみに、トリマは初期約12Vに設定されていました。また、Enableピンは解放のままでいいようです。
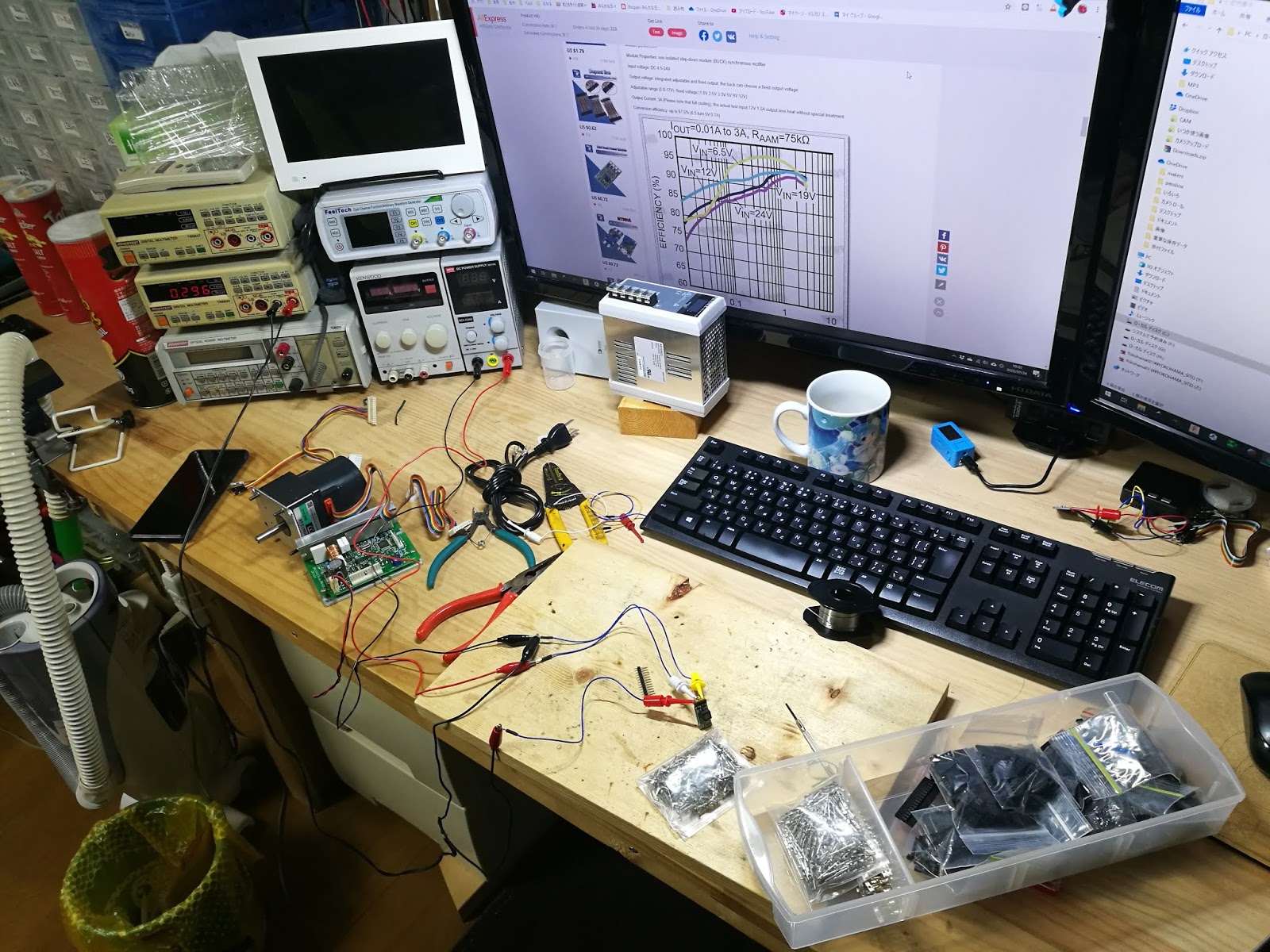
工房を整理して計測器をメイン作業台上に持ってきたので格段に使いやすくなりました。
電源接続用のY端子つけておきます。
この電源でも確認しておきます。なんでか写真が逆だな。
ばっちり安定しています。

次にモータ用の主電源に中継のSMコネクタと電源接続用のY端子つけます。
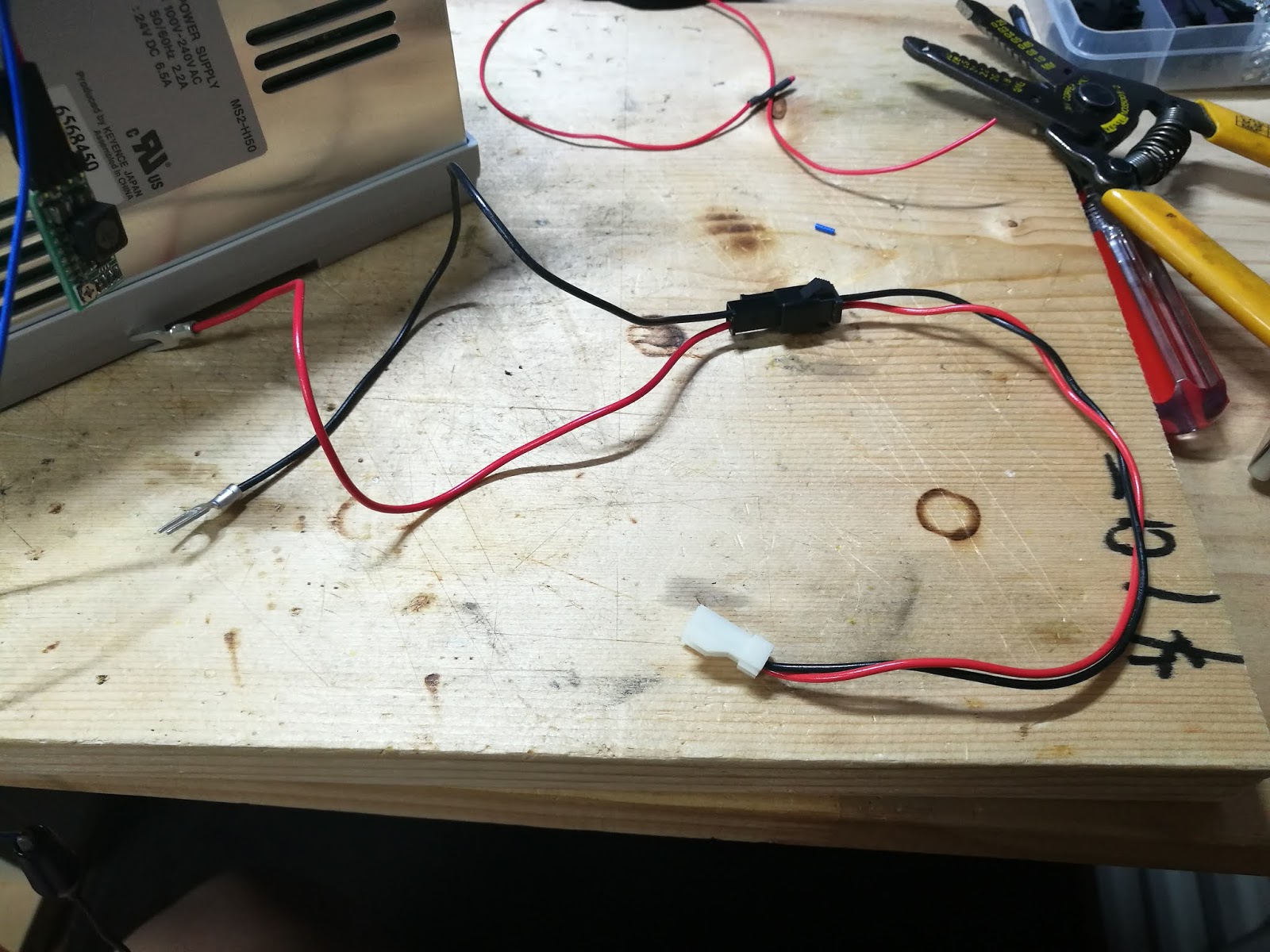
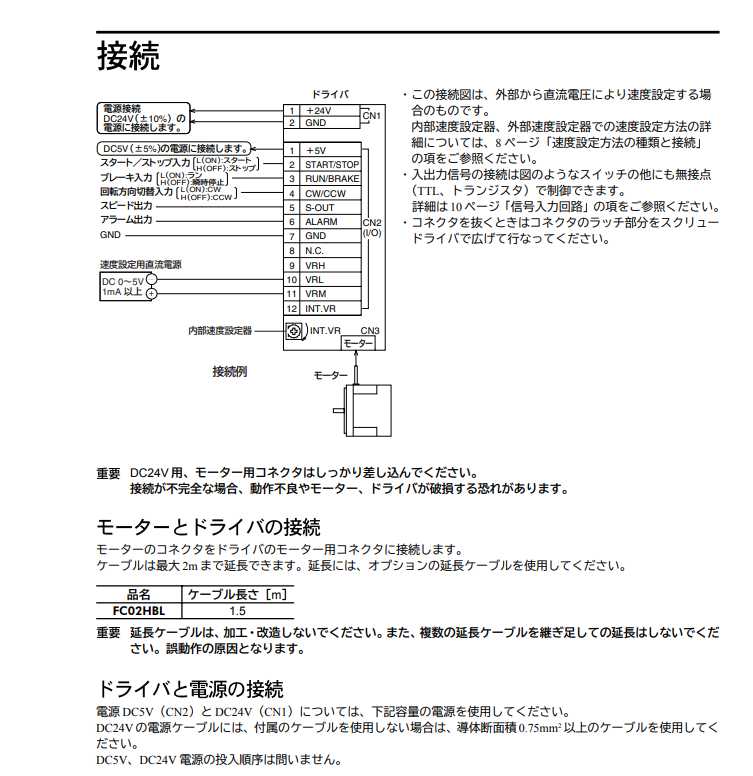
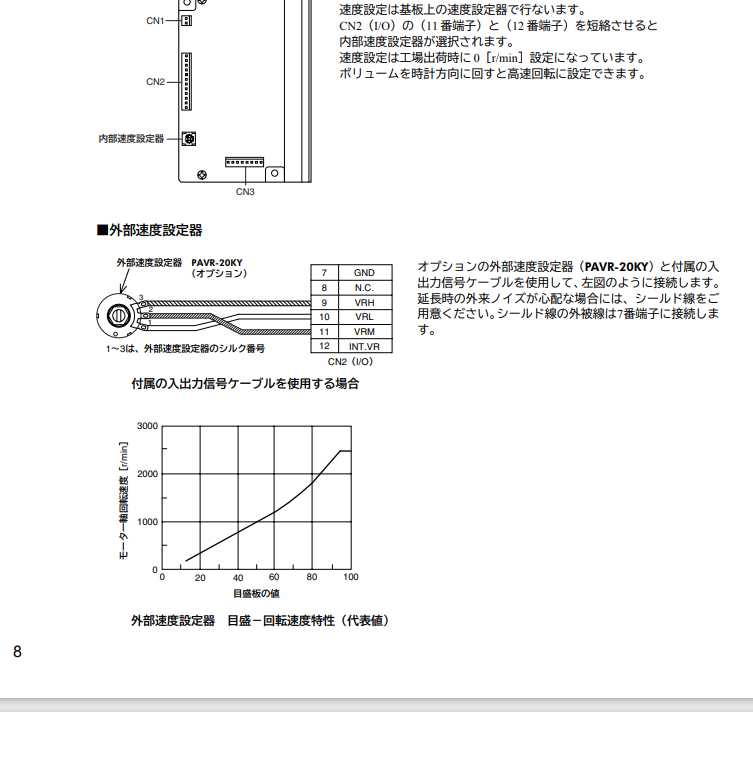
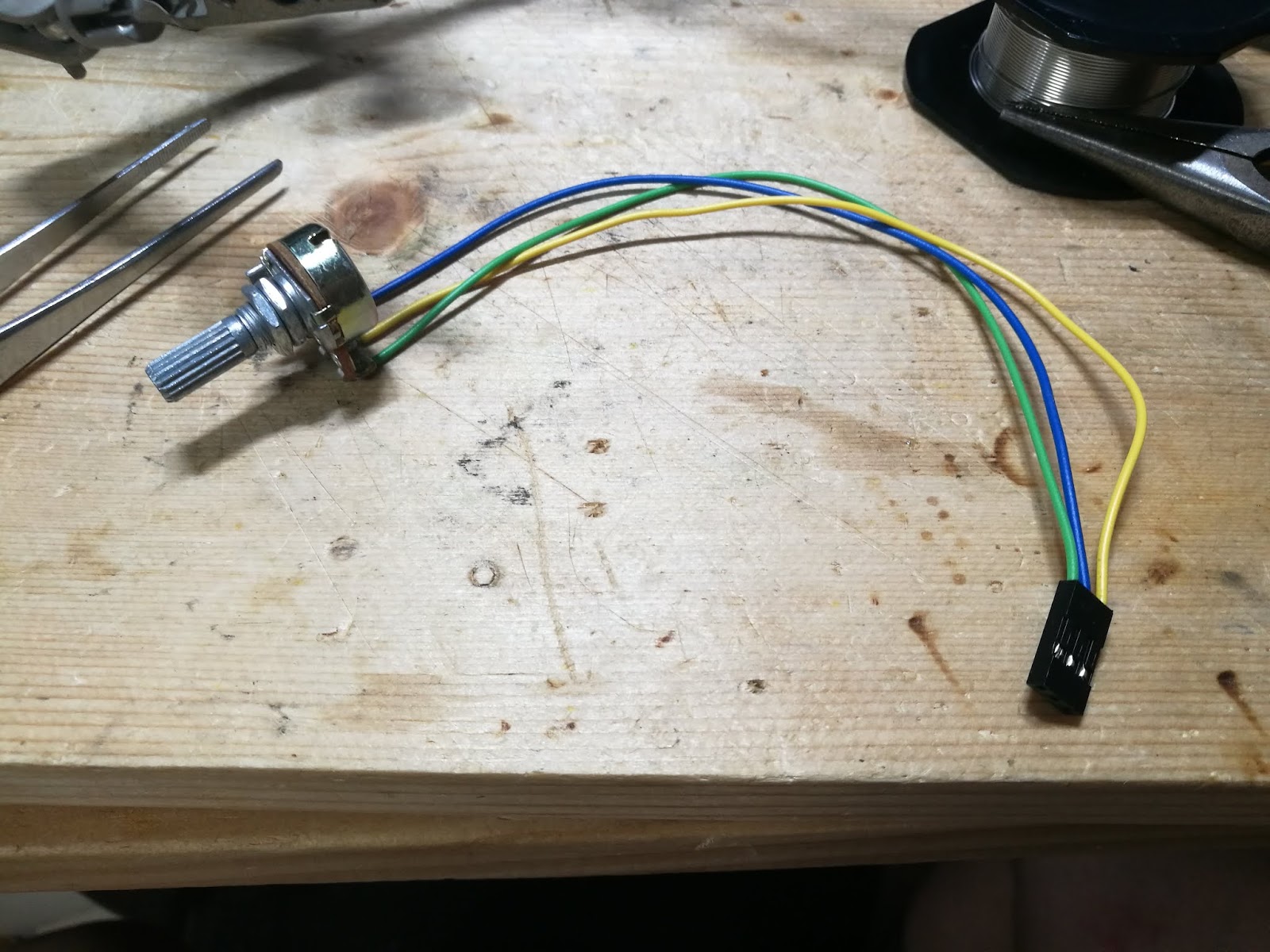
マニュアルに従って「外部速度設定器」に配線します(笑
まあごく普通の可変抵抗器なんですが、マニュアル上は 外部速度設定器 PAVR-20KY(オプション)となっております。大げさ。

外部速度設定器の配線を完了しました。
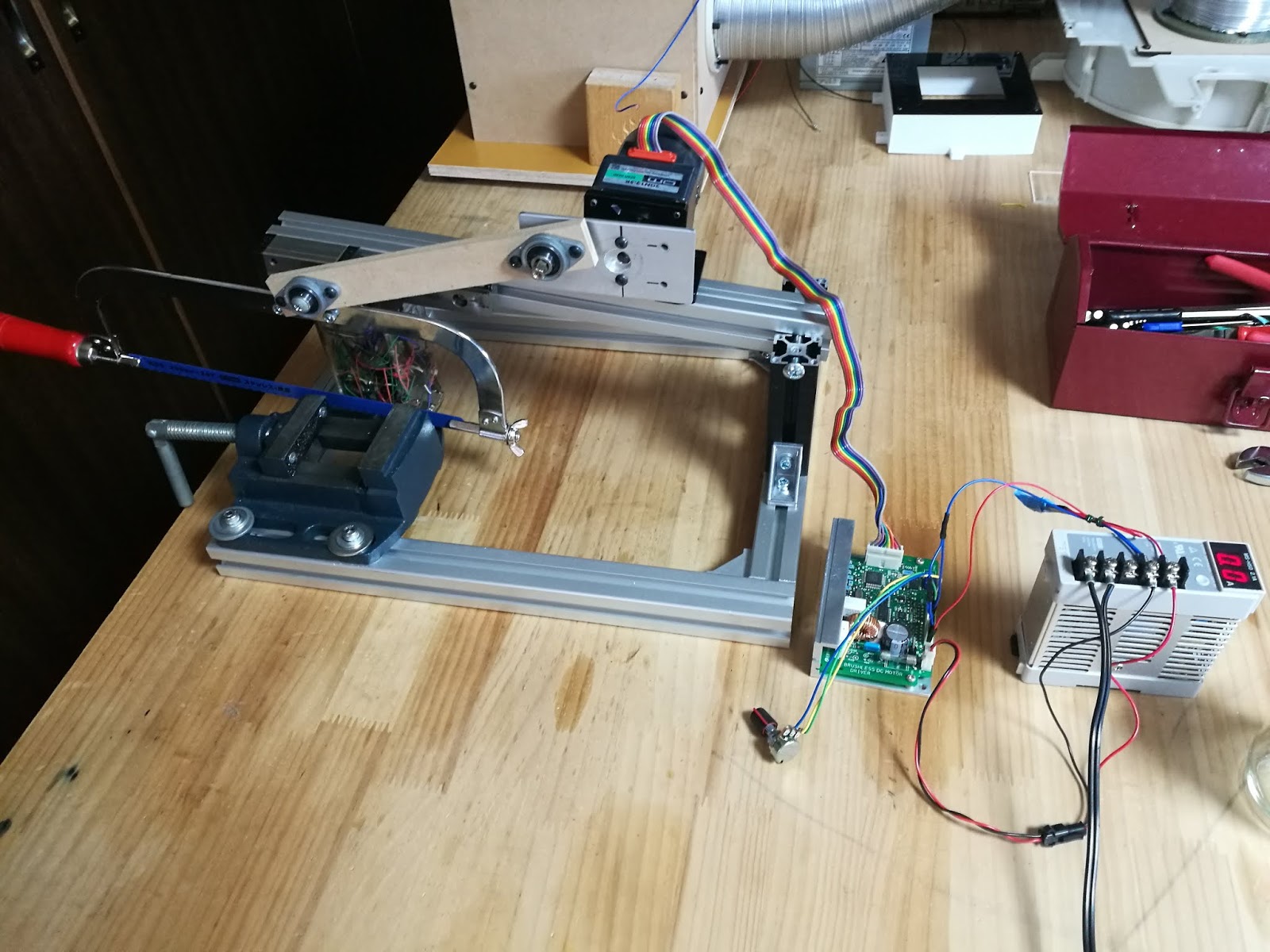
全てを接続します。

回してみましょう。
あっさり回りました。
スタートストップピンはGND接続で回転、ブレーキはGNDでオフ(つまり回る)、回転方向は解放でCCW方向でした。
電流はほとんど流れませんね。モータに10Wって書いてあったのでそこそこ流れるだろうと思って大きめの電源にしたんですが、小さいものに変更してもよさそうです。
それにしてもなんで写真が逆になるんだろう。

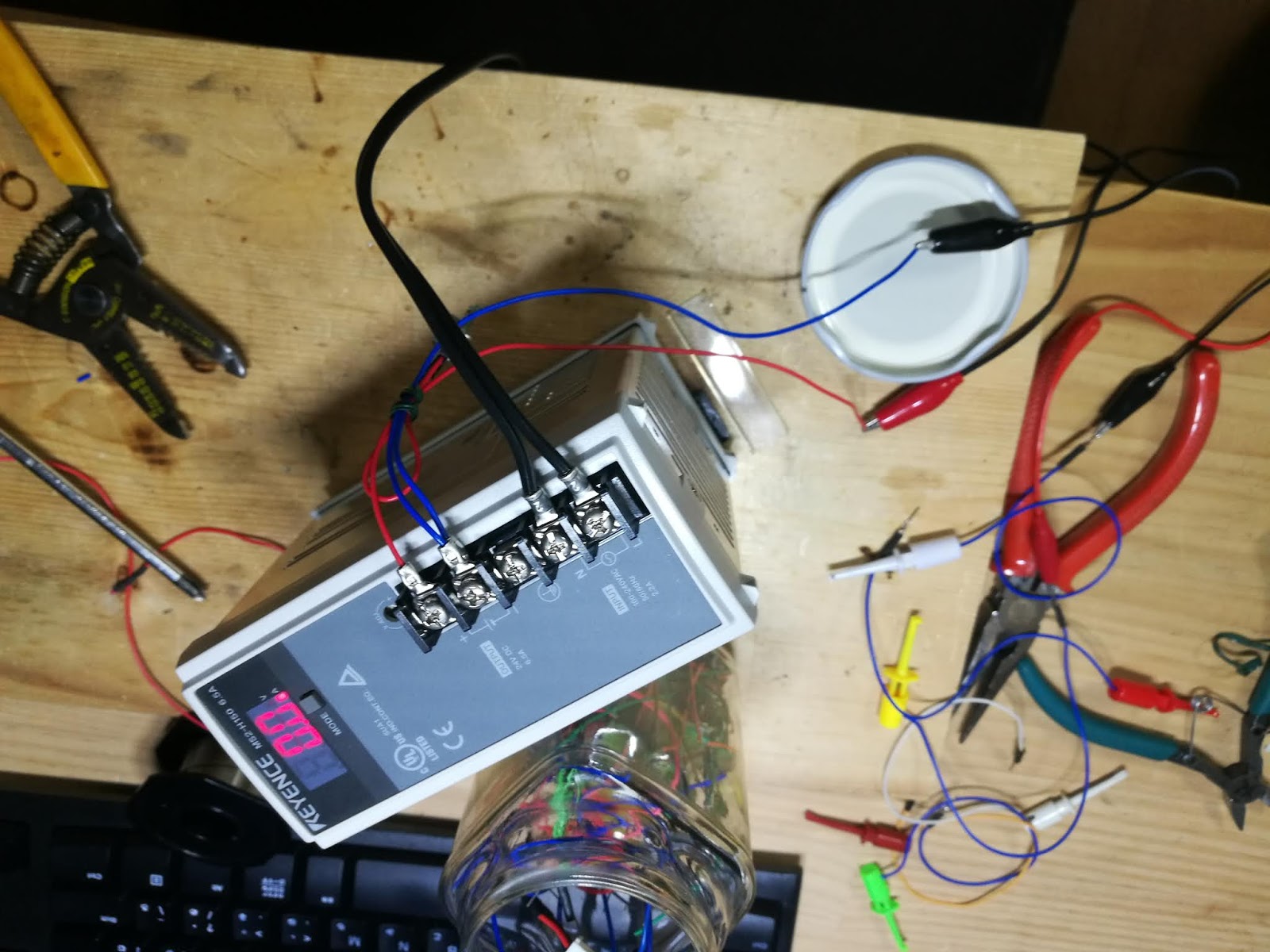
小さい電源に変更します。今度は写真が縦(笑


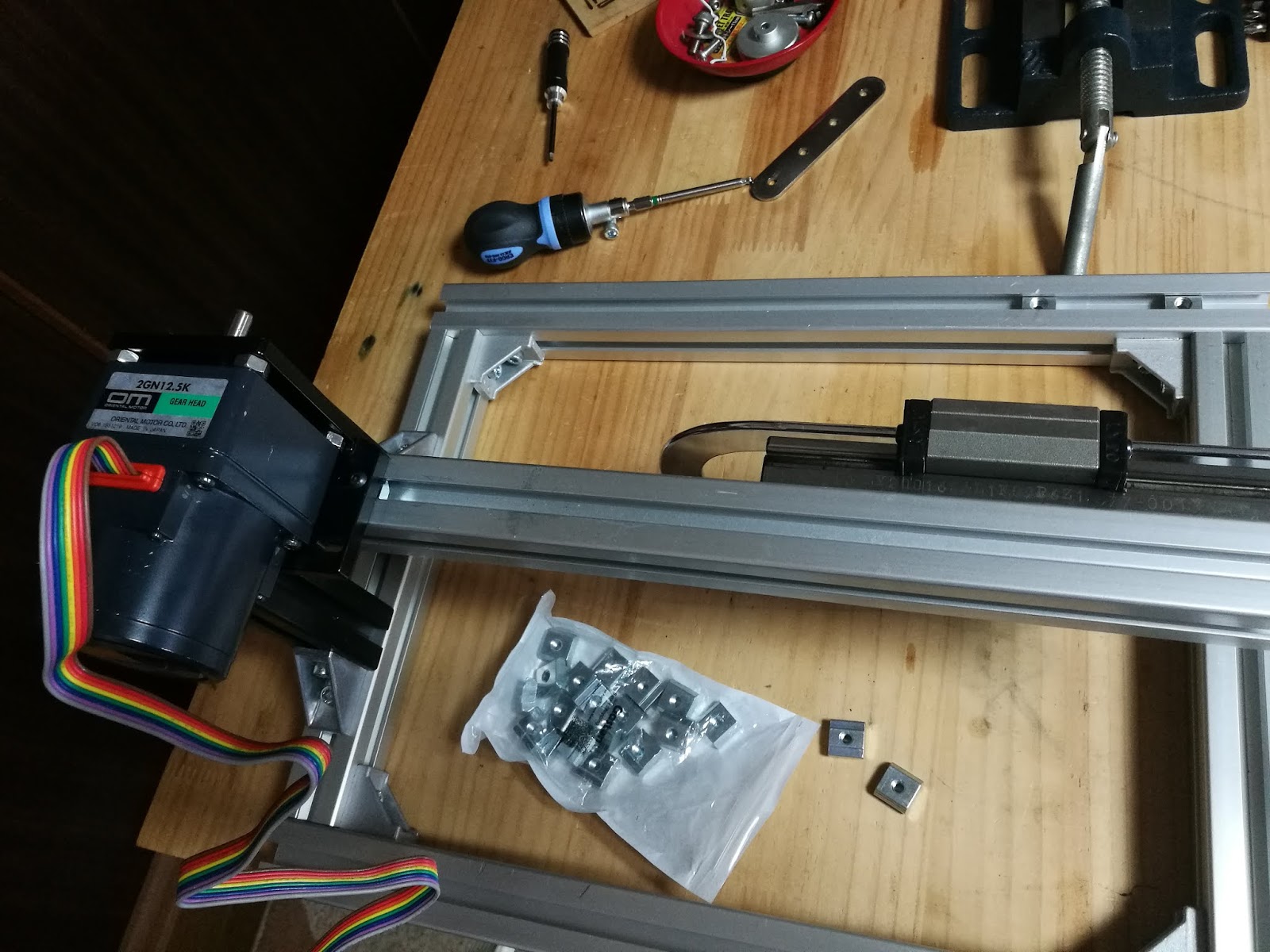
取り付けは不採用になったこのステッピングモータのブラケットが使えそうです。


外して、

無理やり組み替えます。ギアードモータは遊星ギアでもない限りモータと出力軸がずれているのが普通なのでこんな感じになります。まあ固定さえできれば問題ないのであります。

組み替えます。
残念賞だったグラインダを外します。
ついでに鋸も変更することにします。
これまで取り付けていた小型の鋸は軽くて良さそうなのですが、刃が薄いため、荷重がかかったときにいまいちよれよれしているのが気になっていたのです。
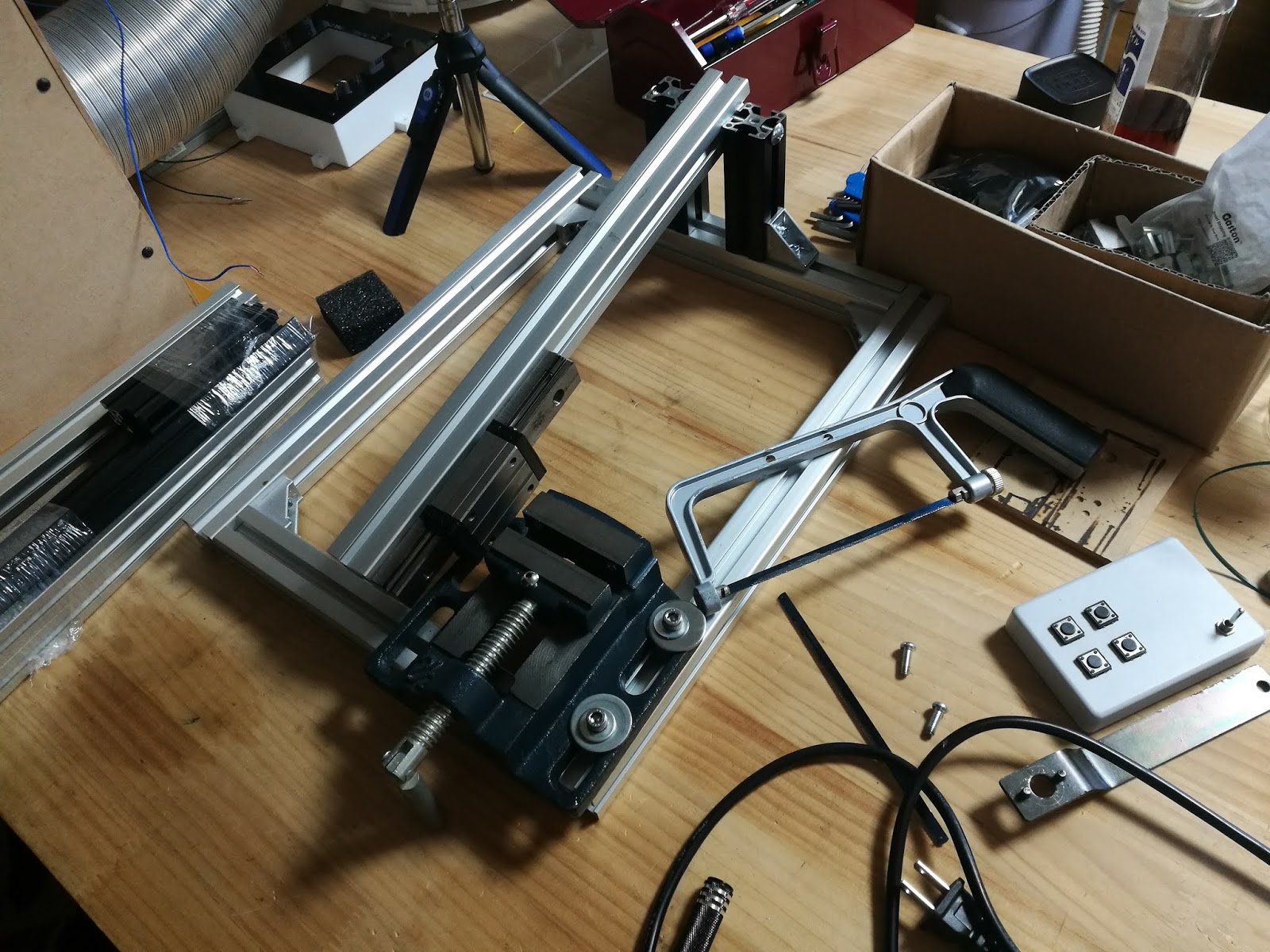
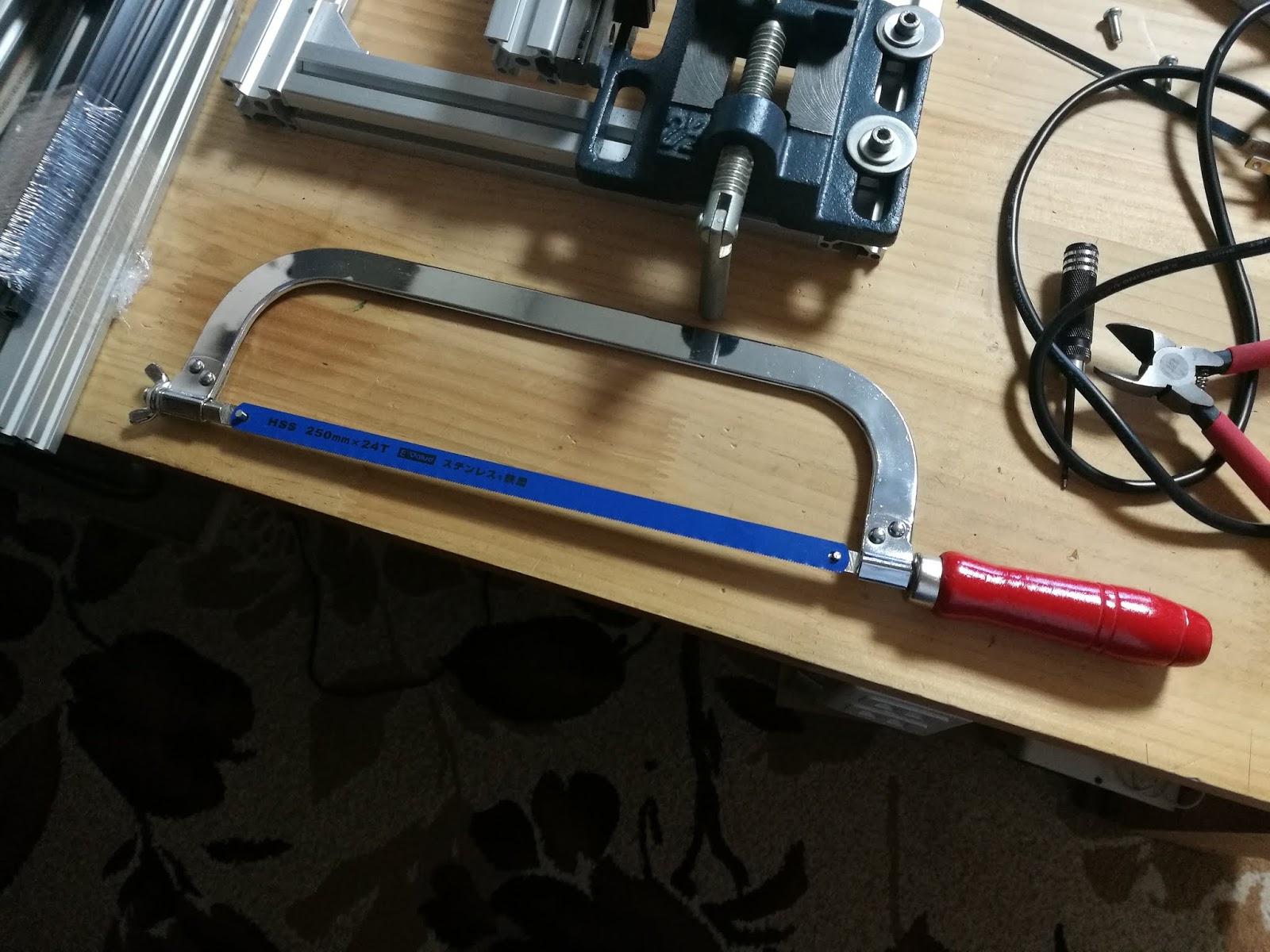
ということで、いわゆるちゃんとした金鋸を使うことにします。このタイプの方がワークに合わせていろいろな種類の刃を選択することができます。
穴位置を出して、

穴開けます。今度は鉄材なので切削油注しながらゆっくり開けます。

きれいに開きました。

取り付けて状態確認。この時に刃がねじれてないことをよく確認することが大事です。
リニアガイドを手で動かしたときにガイドの動く方向と鋸刃の動く方向が平行であることが重要です。ここが斜めになっているとワークをまっすぐに切ることができません。
これは手で切っているときには気にするところではないので注意が必要です。特に私が使うような安物の鋸ではずれているのが当たり前と思った方が良いのです(笑
ずれている場合は鋸の胴を万力で挟んで無理やり曲げて矯正します。

モータの取り付けは先ほどのブラケットがあるので楽です。角ナット入れて、

ねじ止めするだけ。
後ろから。
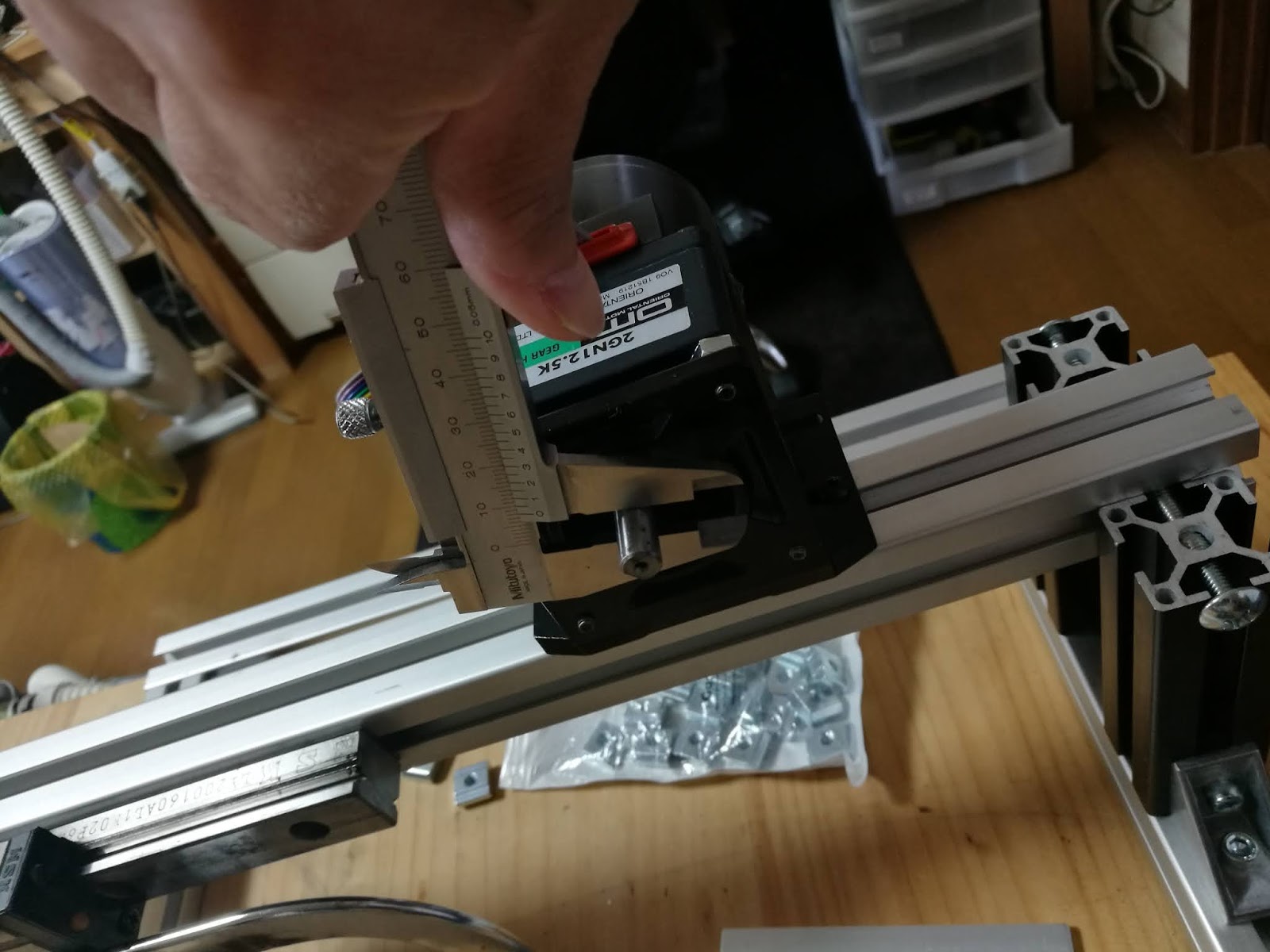
さて、モータを固定すればあと少しのような気がしますが、ここでもう一工夫必要な作業が残っています。それはモータの軸への駆動リンクの固定です。
グラインダは元から出力軸にねじが切ってありますので、それに合うナットを二つ使えば駆動リンク(今使っているのは3mmtのアルミ板に穴を開けたもの)を簡単に固定できます。一方でこのギアードブラシレスモータはキー用に一部が平たく削られた8mmφの丸シャフトが出ているだけです。このままでは駆動リンクの固定ができません。
しばし考えたのちに良いアイデアを思いつきました。
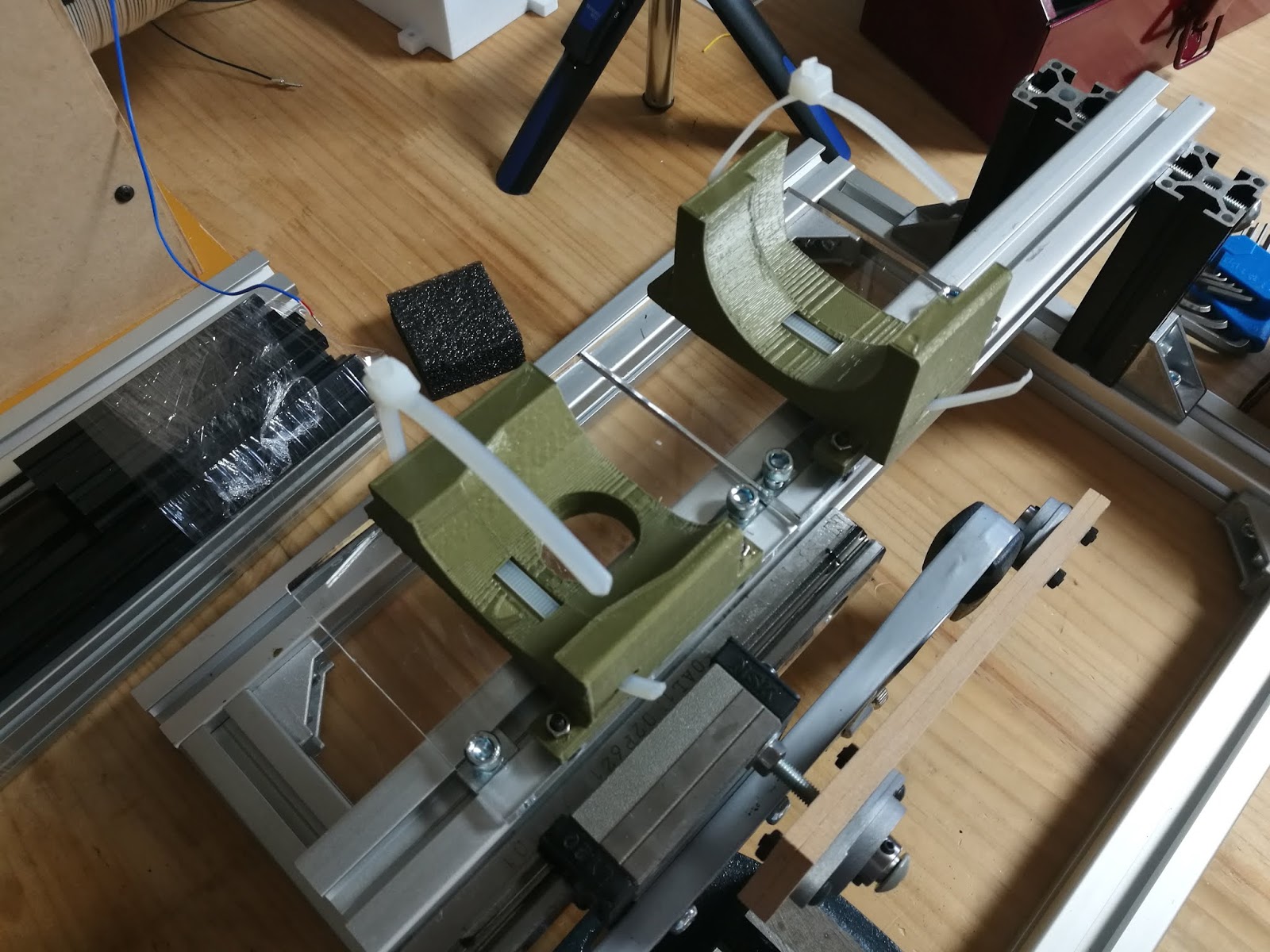
それは先ほど検討したステッピングモータのお尻についているようなスタビライザ/ダンパを使うという方法です。下の写真の黄色いやつです。

スタビライザはイモネジでシャフトにかみついており、シャフトに合わせて回転します。
そして回転面にはある程度の大きさがありますので、ここにねじ穴開ければ駆動リンクを固定することもできそうです。
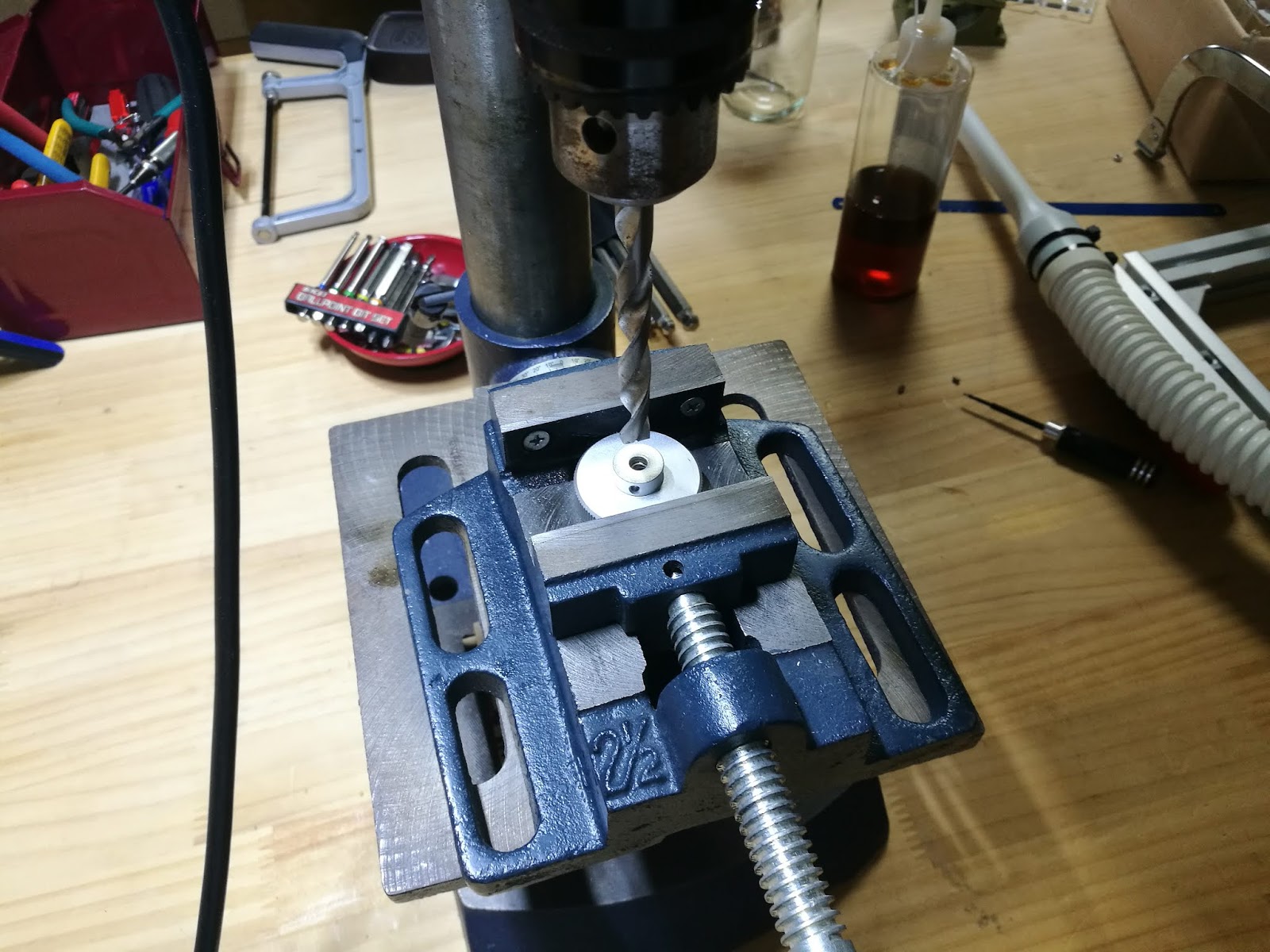
ということで、再びおもちゃ箱をひっくり返します。すると、使えそうなものがありました。が、シャフト穴径が5mmしかありません。
材はアルミみたいですのでこの穴を8mmまで広げて使うことにしました。
バイスに固定してボール盤で穴を広げます。

8mmφの錐をもみ込んでいきます。

次いで駆動リンクを固定するための貫通穴もあけます。
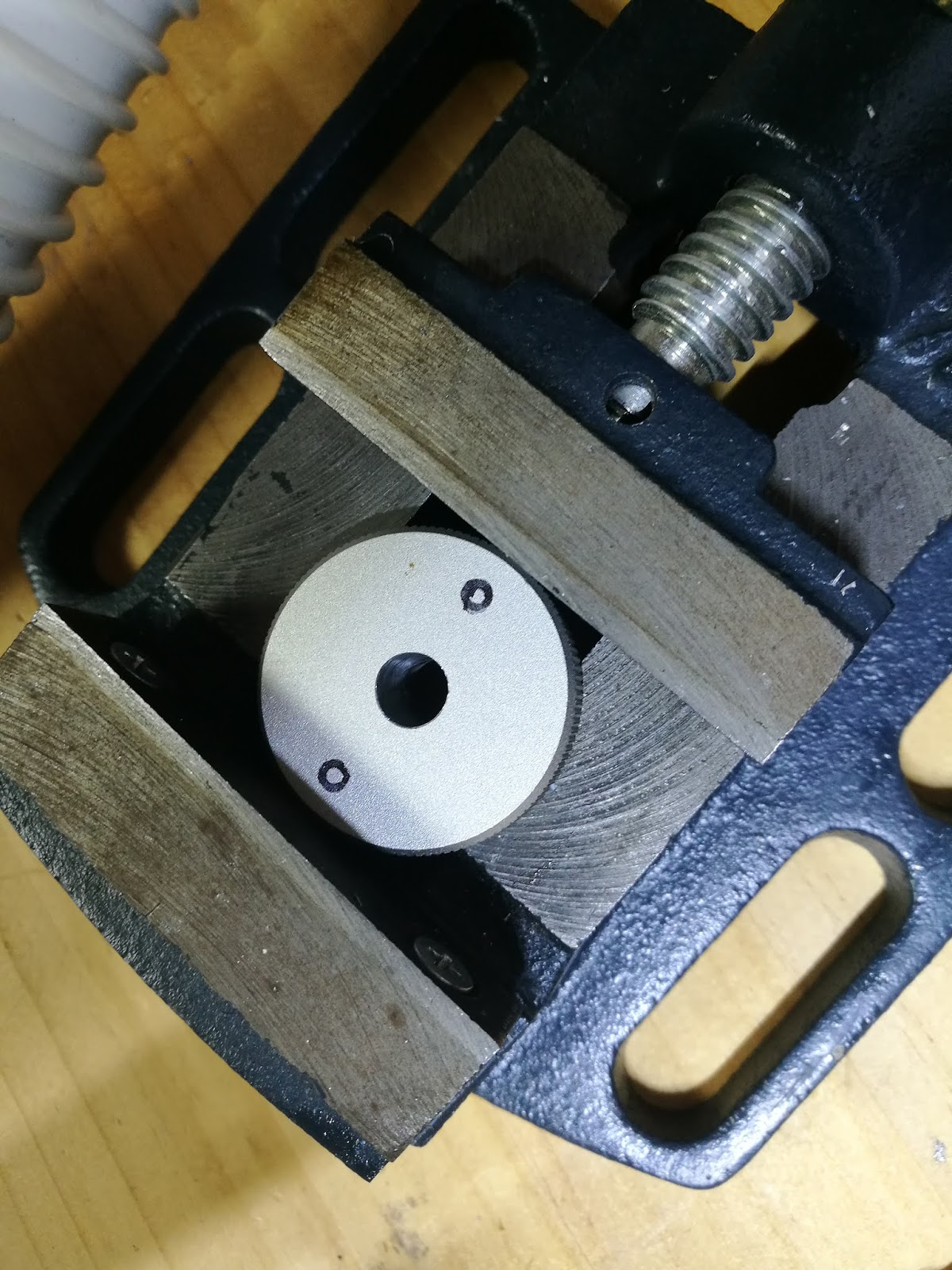
ここはねじ切りした方がエレガントではありますが、面倒なので馬鹿穴+ボルトナット方式で行きます。

穴が空いたら駆動リンクに位置合わせして、駆動リンク側にも穴を開けます。

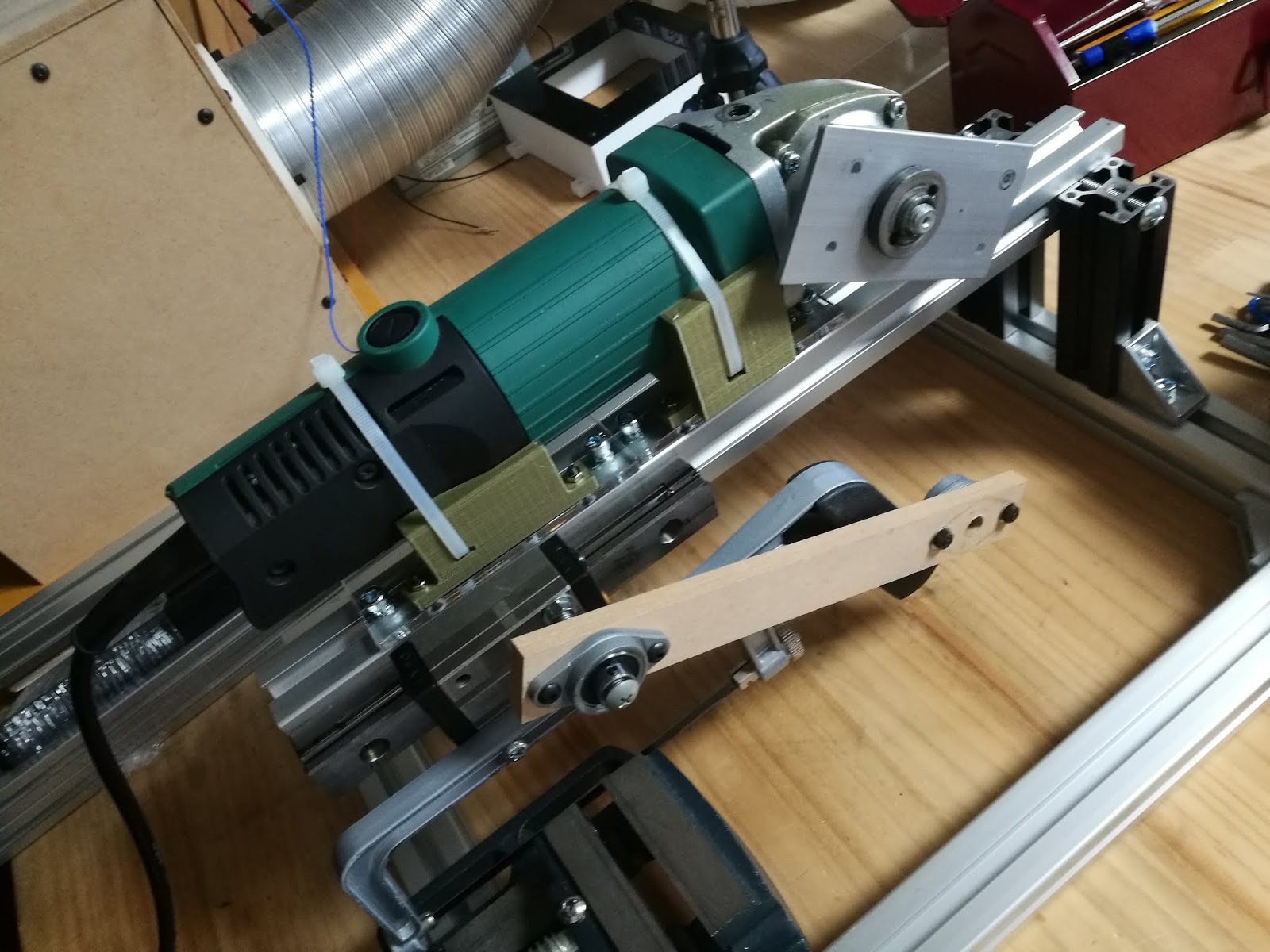
そして加工したスタビライザ改をモータ軸に軽くたたき込んでイモネジでしっかり固定します。あとはリンクを繋いでクランクの伸びいっぱいの位置でスライドが脱輪しないようにモータ位置を調整します。
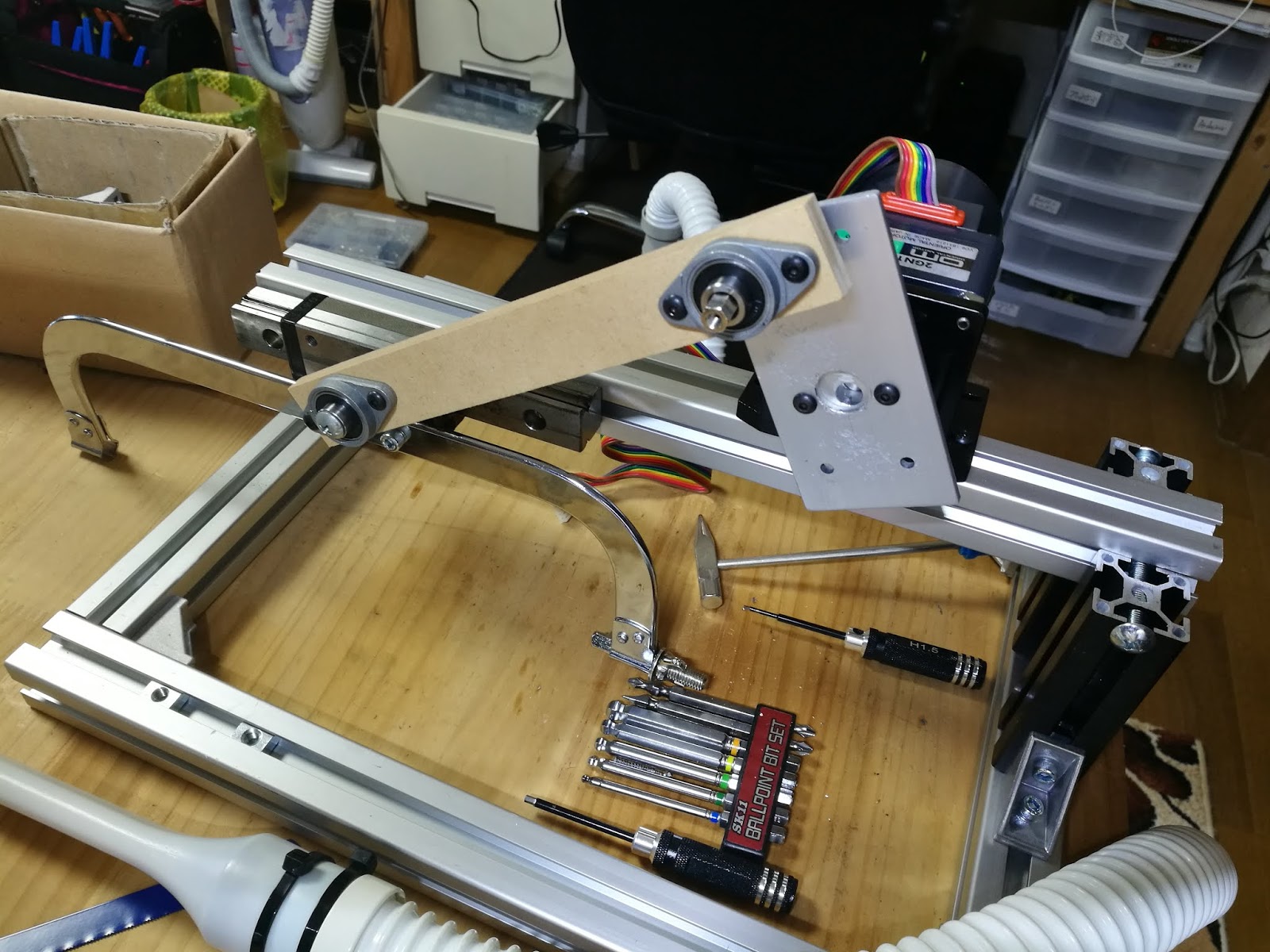
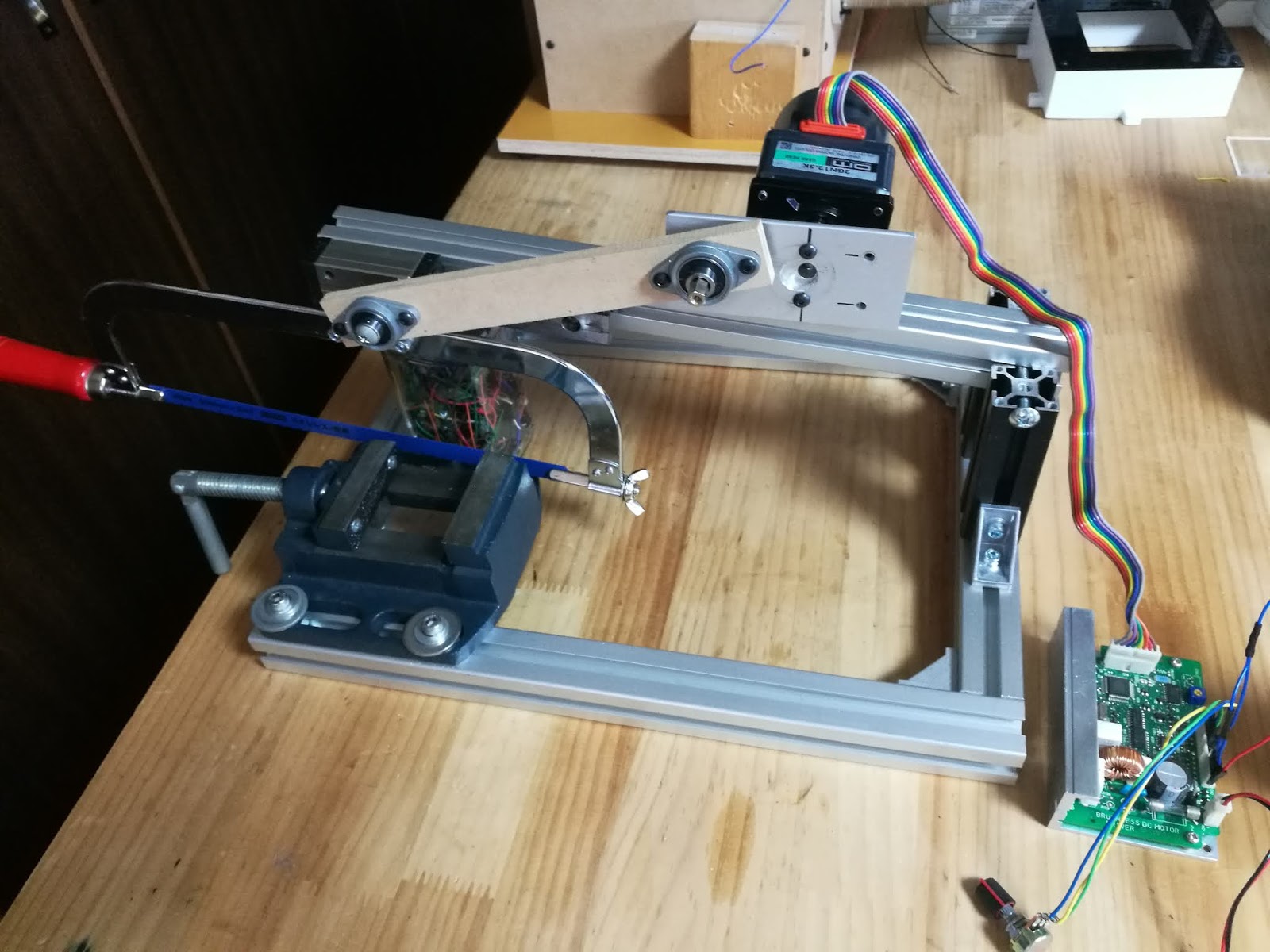
完成しました。今度はグラインダに比べてかなりトルクが上がっているはずです。
スペックも何にも調べてないですが、動けばOKなのであります。
ドライバを繋いで、
動かしてみます。
いい感じです。外部速度設定器(笑)もちゃんと機能しております。絞り切ったところで鋸が停止するのも使いやすくていいですね。
では切ってみます。今度はどうでしょうか。
おおお!今度はいい感じで動きます。
ただ、止まった状態から動き出すことはできません。やはりトルクが足りてないようです。この状態でも使うことはできますが、やはり停止状態から動かしたいです。
ということで、もう少しトルクが上がるように駆動リンクにジョイントを取り付ける位置をもう少し軸側に寄せた穴を新たに開けて動かしたりしてみましたが、いまいちであります。動くこともあるのですが、始動時のリンク位置によって動かないこともあります。
さてどうしたものかといくらか試行錯誤してみました。
切断自体は気持ちよく進むんです。
しばしの試行錯誤の結果、刃の向きを逆にすることでうまく行きました。
よく知られているように日本と欧米では鋸の切れ方向が逆です。日本の鋸は使い手から見たときに引くときに切れ、欧米の鋸は押すときに切れます。で、金鋸は欧米型ということで、デフォルトは押すときに切れる刃の取り付けです。そのため今の取り付けはモータ側から見て押すときに切れるようになっています。これを逆にしたということです。
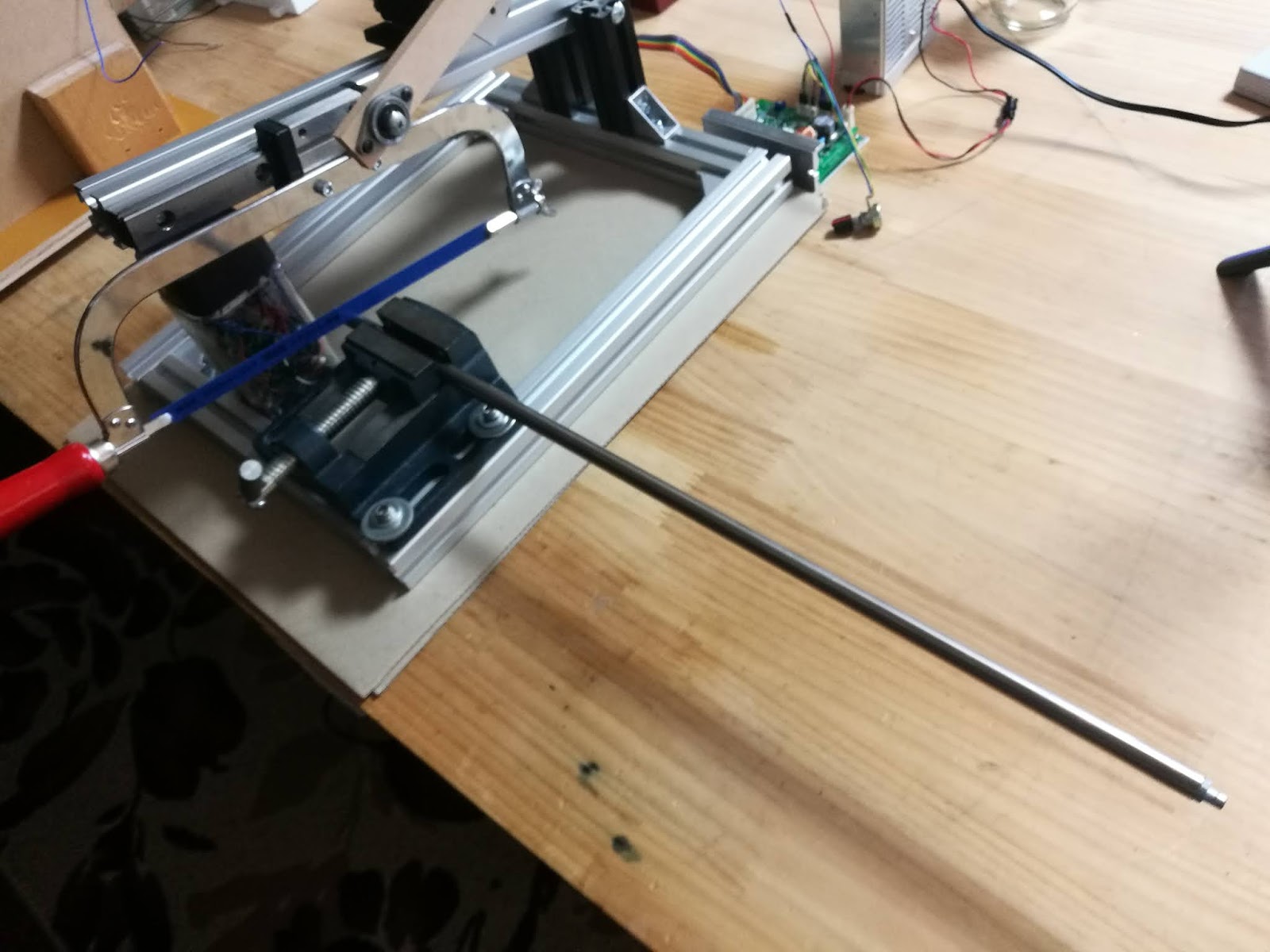
では同じシャフトを停止状態期から切断するところまでを2分程度の動画でどうぞ。
切断が完了すると鋸が自重で下に落ちてしまいますので、インスタントコーヒーの瓶で受けるようにしています。ストッパーや安全周りの改善はこれからです。
試してませんが、回転方向を逆にすることでも違いが出ると思います。現在のモータの回転軸はスライドの往復軸から上にオフセットされており、CW回転させていますので鋸の往復の軸に最も近く動いているのは駆動リンクについているジョイントが下に来る時、すなわち鋸を押しているときです。この状態が最も鋸をスライドさせる力が強いと思って決めたのですが、それでもトルクが足りなかったということでしょう。
切断物の切断面は非常にきれいです。切断の最後のところに若干のバリが残りますが、これもやすりで軽く仕上げてやれば十分だと思います。



さて、これでとりあえず使えそうなレシプロソーが手に入りました。実戦投入します。
さて、なんでそもそもこれを作ったのかというと、レーザ加工機のZ軸ステージの昇降用に使うリニアガイドのレールを切断したいがためです。
いきなりの大きな寄り道でしたが、次回からはちゃんとレーザ加工機に戻りたいと思います。