
DINレール買ってきました。
Aliexpressでこれを買っているのですが、到着まで待ちきれませんでした。

買ってきたのは秋葉ではなくここ、サトー電気です。先日Kama_AGEさんがいらっしゃったときに聞いていたお店です。横浜店はなんと会社から一駅の小机にあったのです。今まで全く知りませんでした。

行ってみると、DINレールはもちろんのこと、一通りのパーツがそろっているではないですか。すばらしい。間口はそれほど広くないのですが奥の方に閉架書庫というかなんというか、注文すると持ってきてもらえる棚が沢山見えています。
ということで、DINレールはもちろんですが、自宅からすぐに行けるあるいは会社帰りに気軽に寄れるところにパーツ屋さんがあるということが分かったうれしい出来事でした。問題はサトー電気が開いている時間には帰れないということですかね(笑
さて、買ったのは500mmのレールです。

これを使って早速長いスライダーを作ってみました。
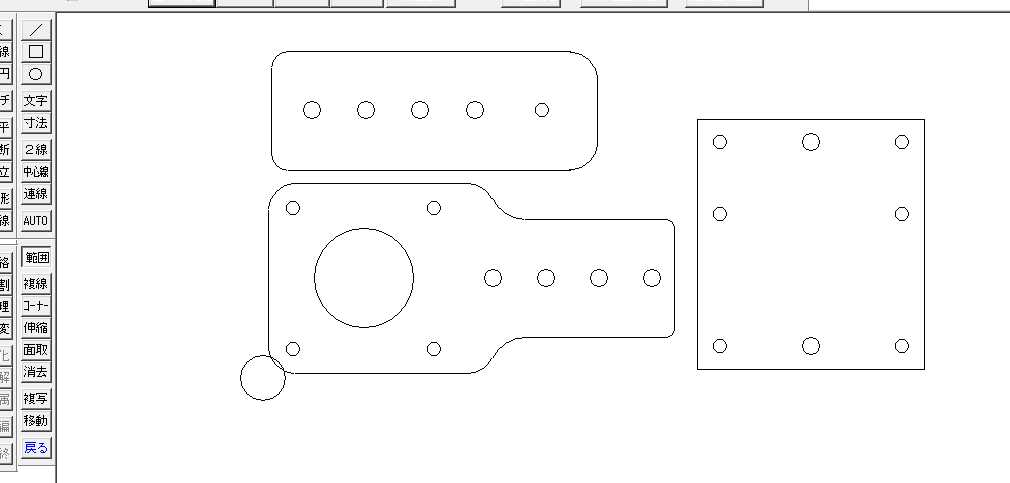
ちょいちょいとfusion360で設計を行って、アクリルで作るパーツをdxfに落とします。
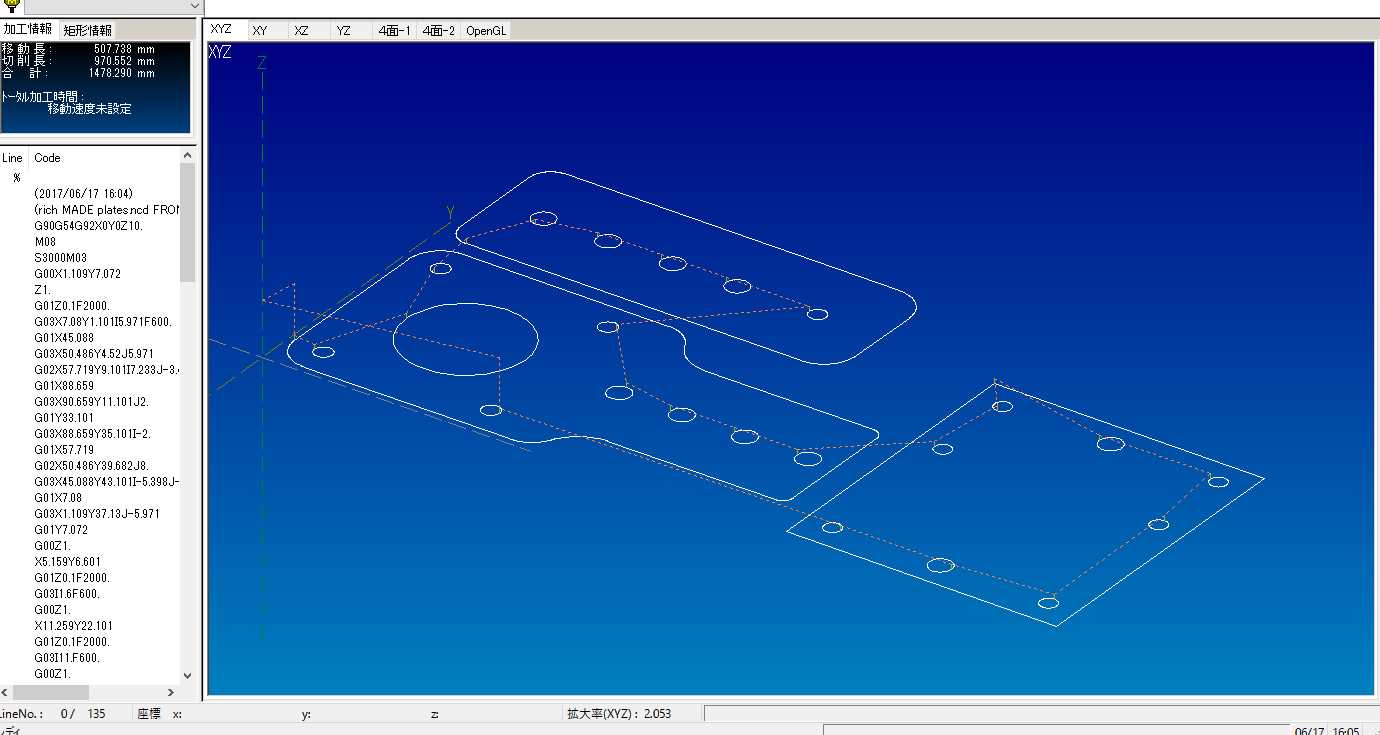
原点とCAMレイヤーを定義したら、NCVCでGコード化します。
アクリル板をセットして、
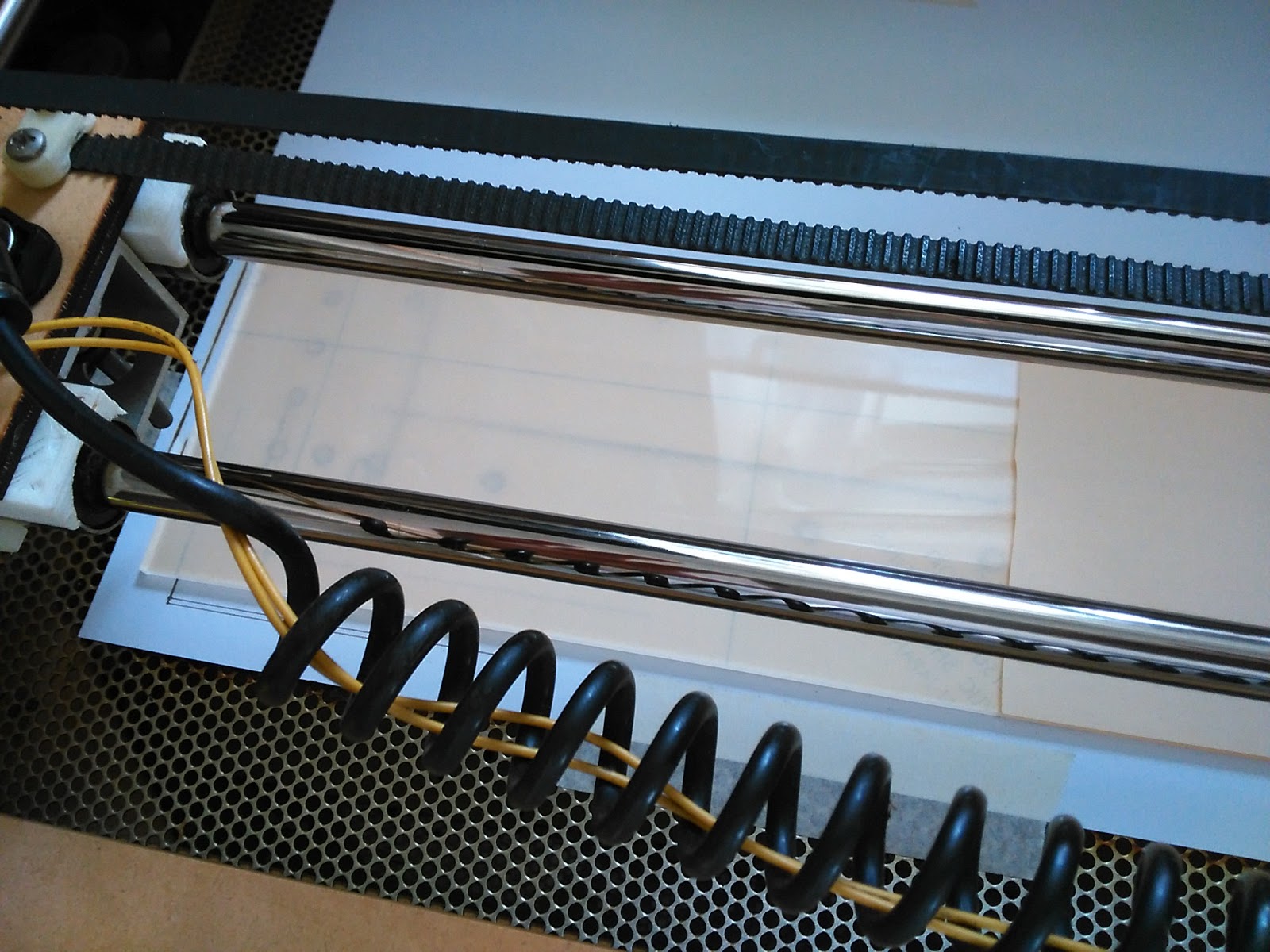
切断します。動画で。
もう一本
切れました。
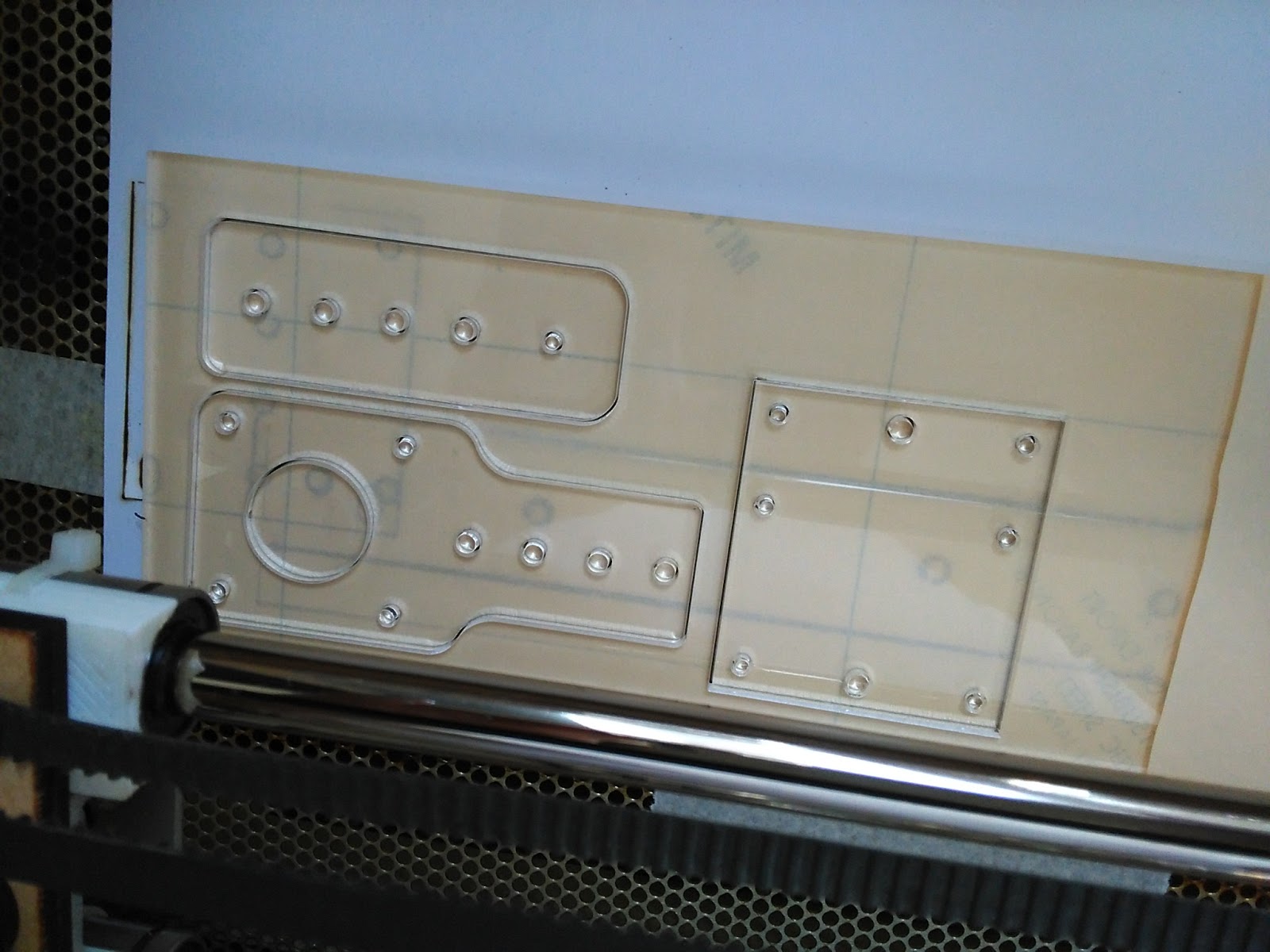
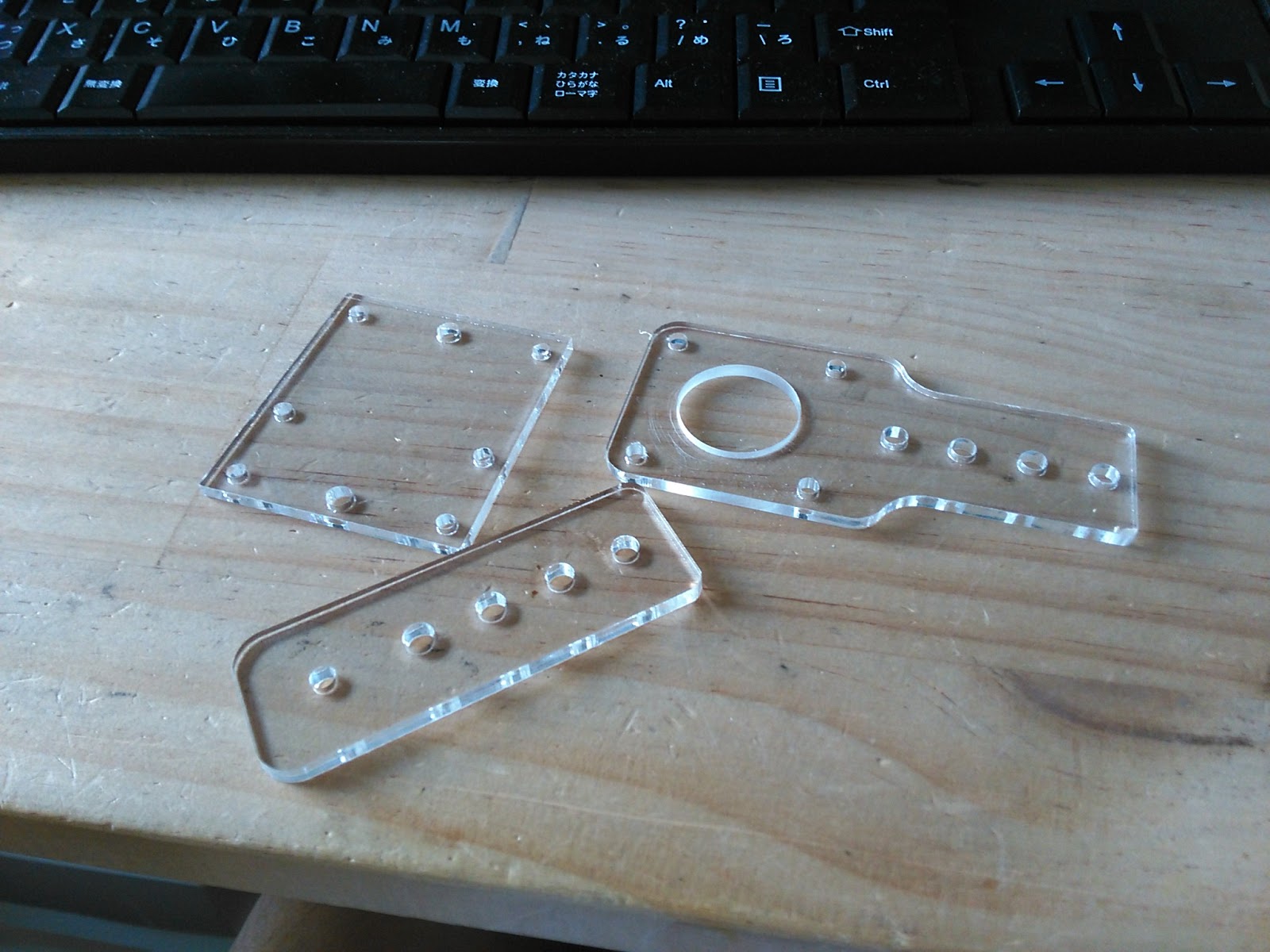
外して、
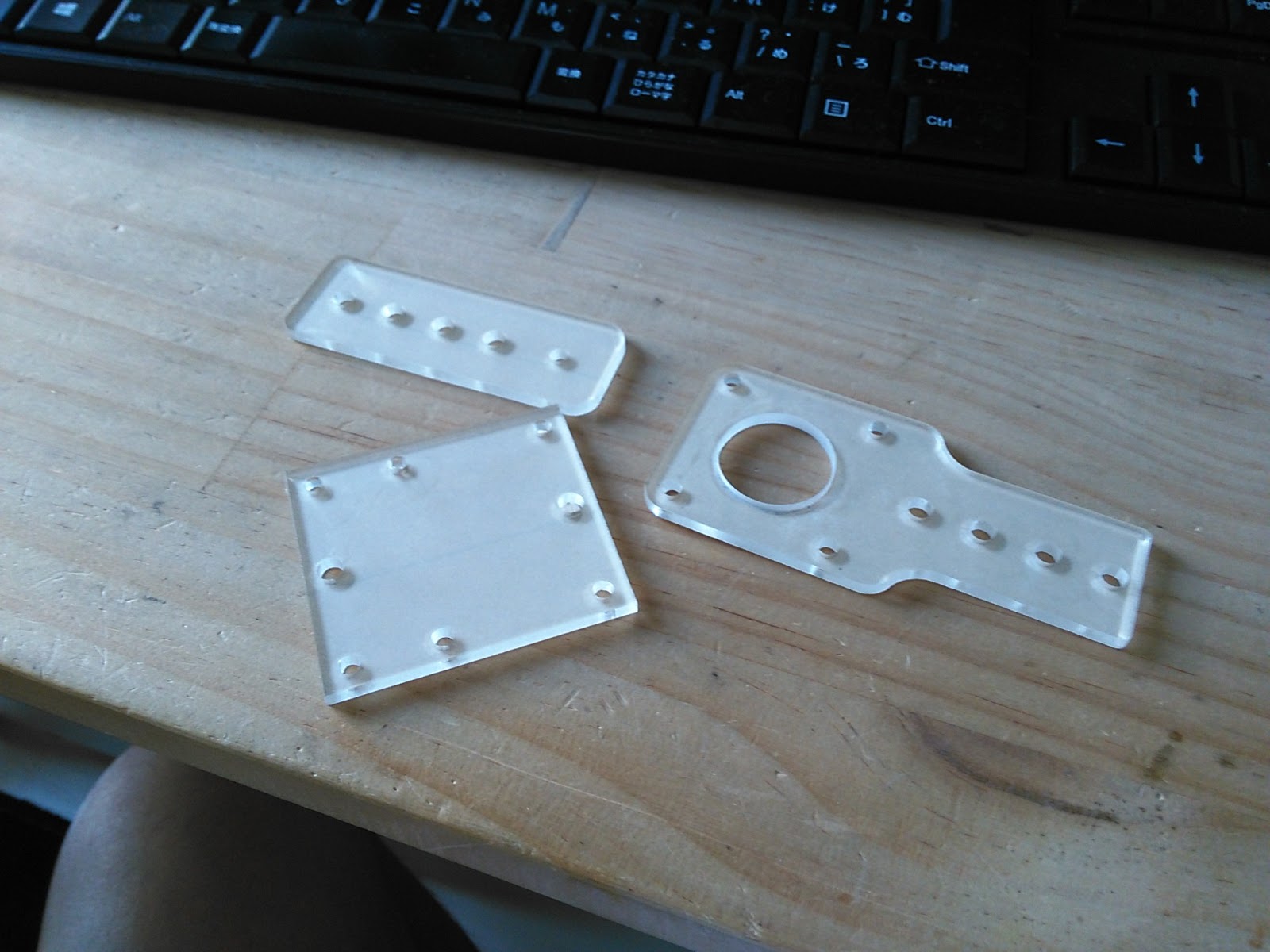
保護紙剥いで出来上がり。
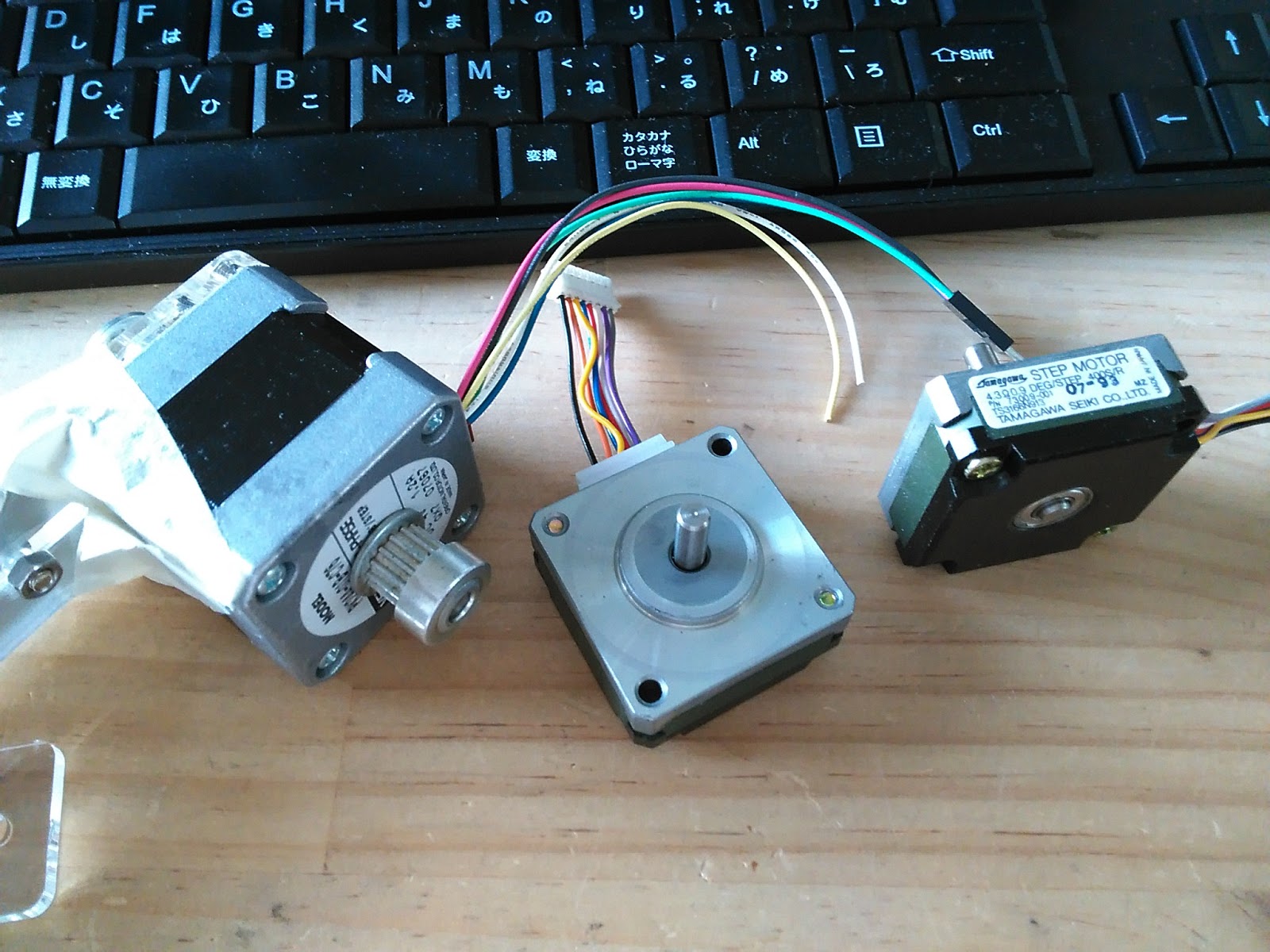
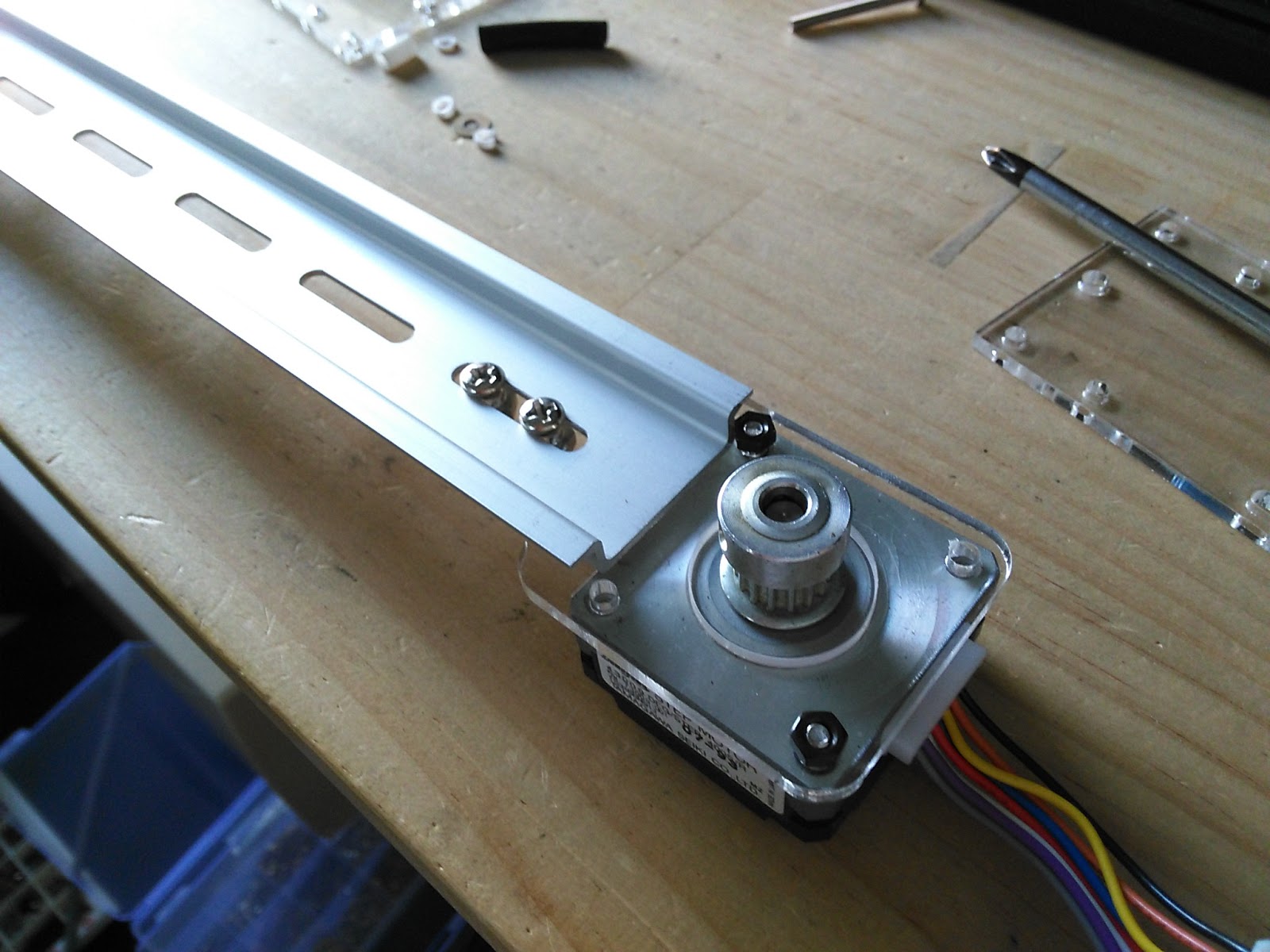
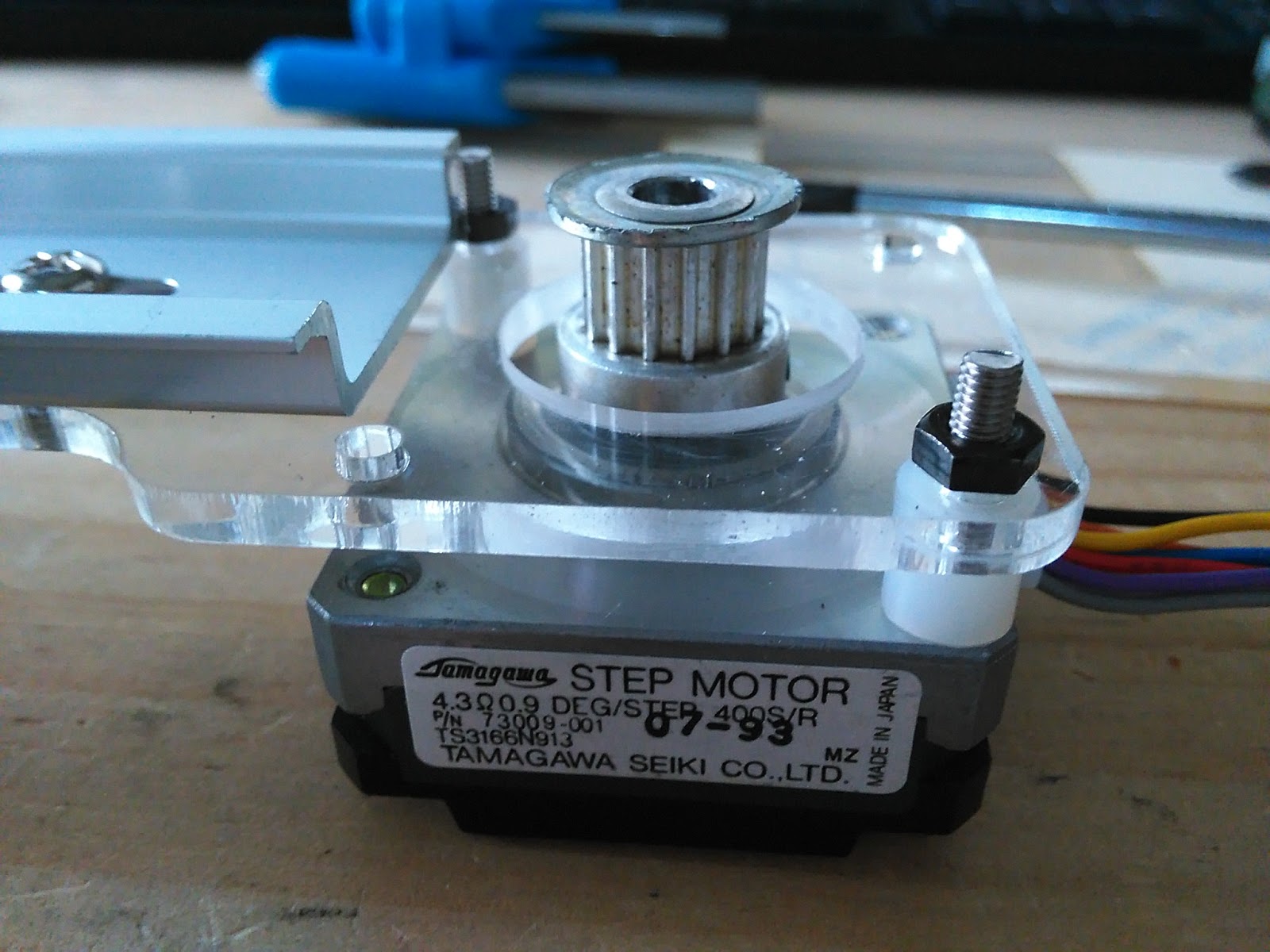
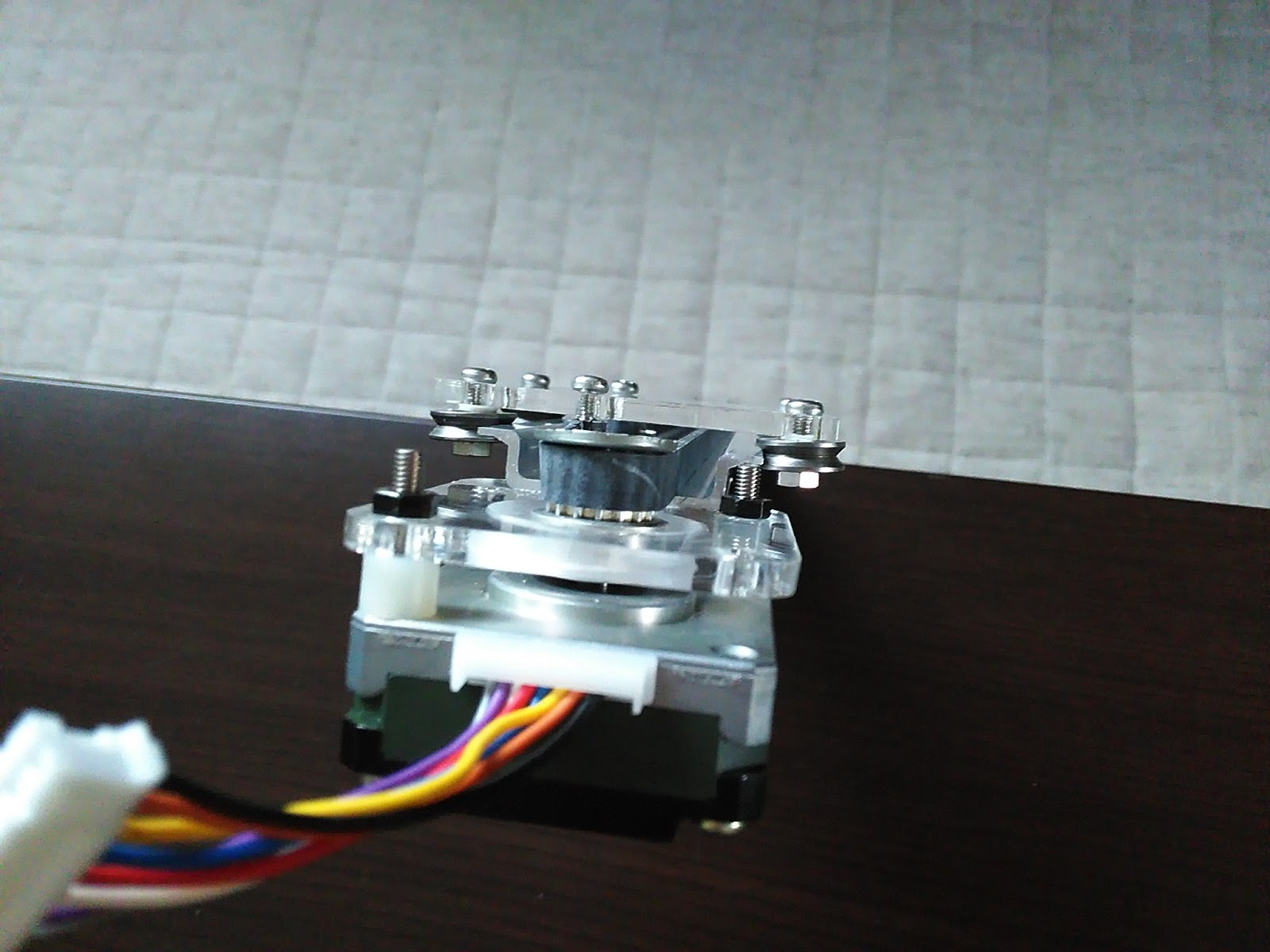
モータはこの薄い奴を使うことにします。DINレールスライダーはせっかく薄くできているので、その雰囲気を壊さないようにしたいという選択です。
このモータは大阪日本橋のDigitでかなり前に購入したもの。薄いので今回の用途にはぴったりです。
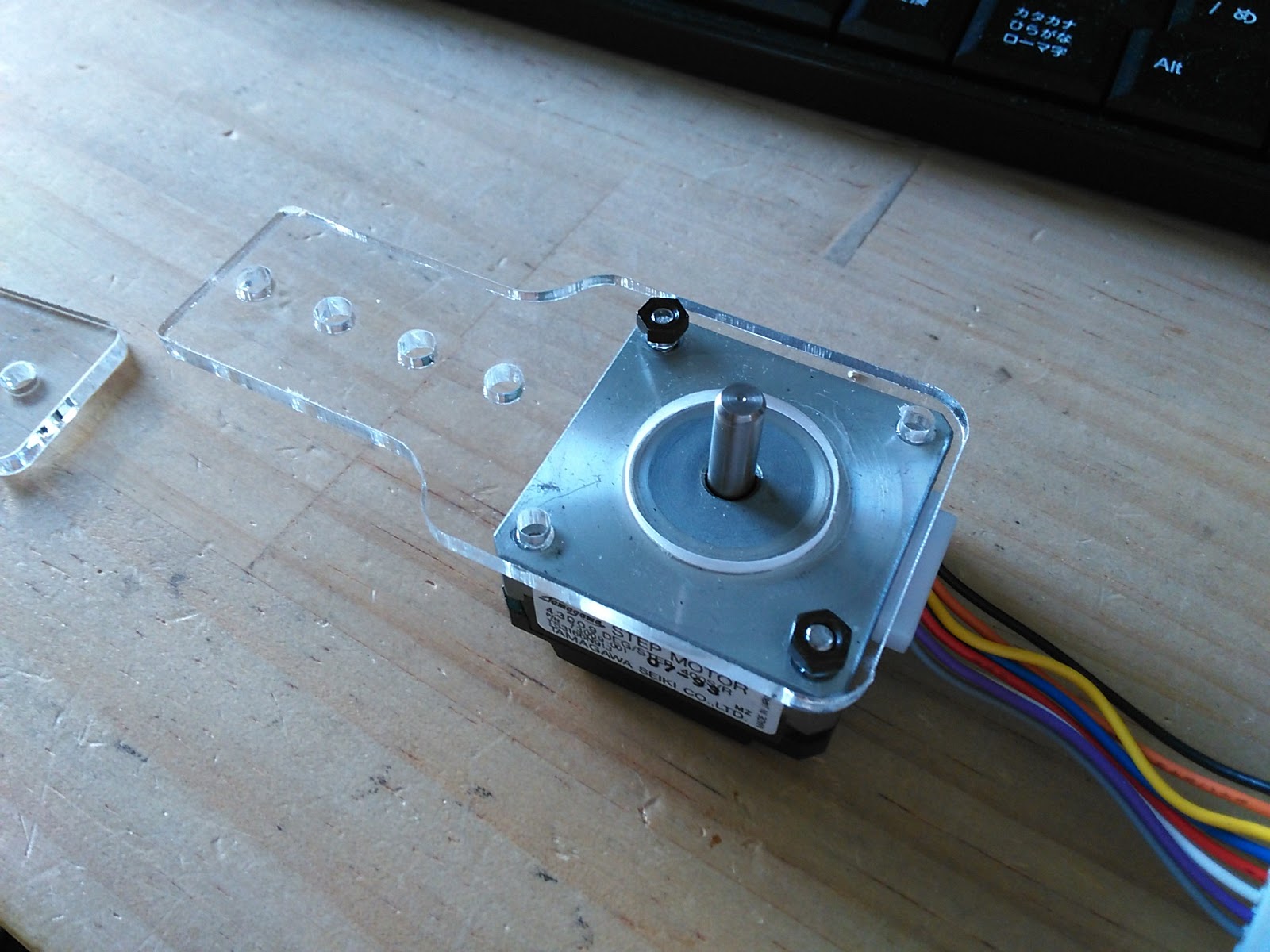
切り出したアクリル板に仮止めして具合を見ていきます。
タイミングプーリーはこんな感じですかね。

ベアリングはアクリル板に固定する際に板の表面から少しだけ浮かしてやる必要があります。そうしないと回転部分が板の表面にこすれて摩擦抵抗が出てしまいます。ワッシャでもいいのですが、今回は適切な大きさのものが無かったのでこれを切って使うことに。

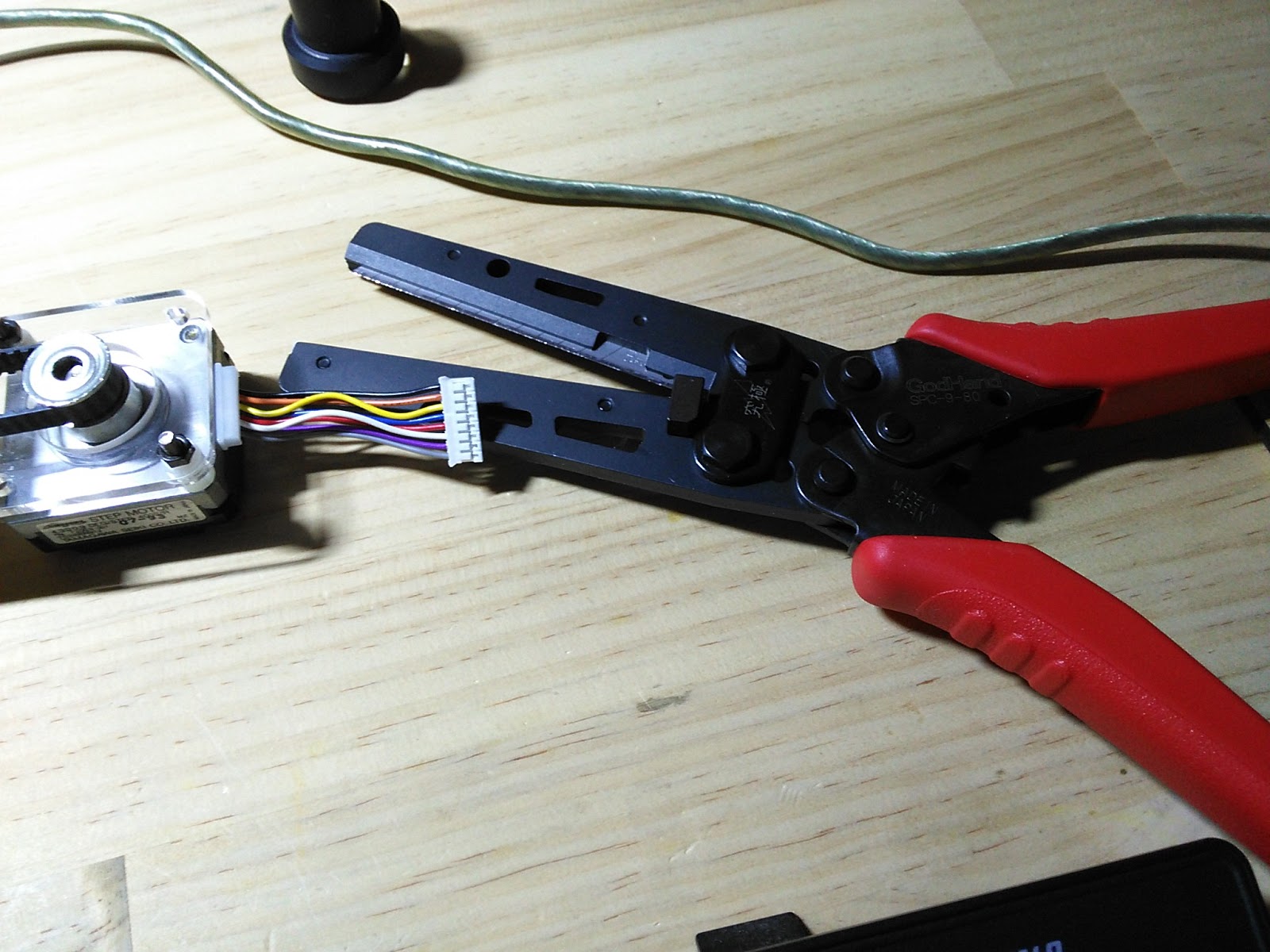
プラスチックを切るといえばこれです。これ。GodHandのアルティメットカッター。

今回も完璧な仕事をしてくれました。全く素晴らしい。

モータの対面につけるプーリー。こちらは歯はついていません。

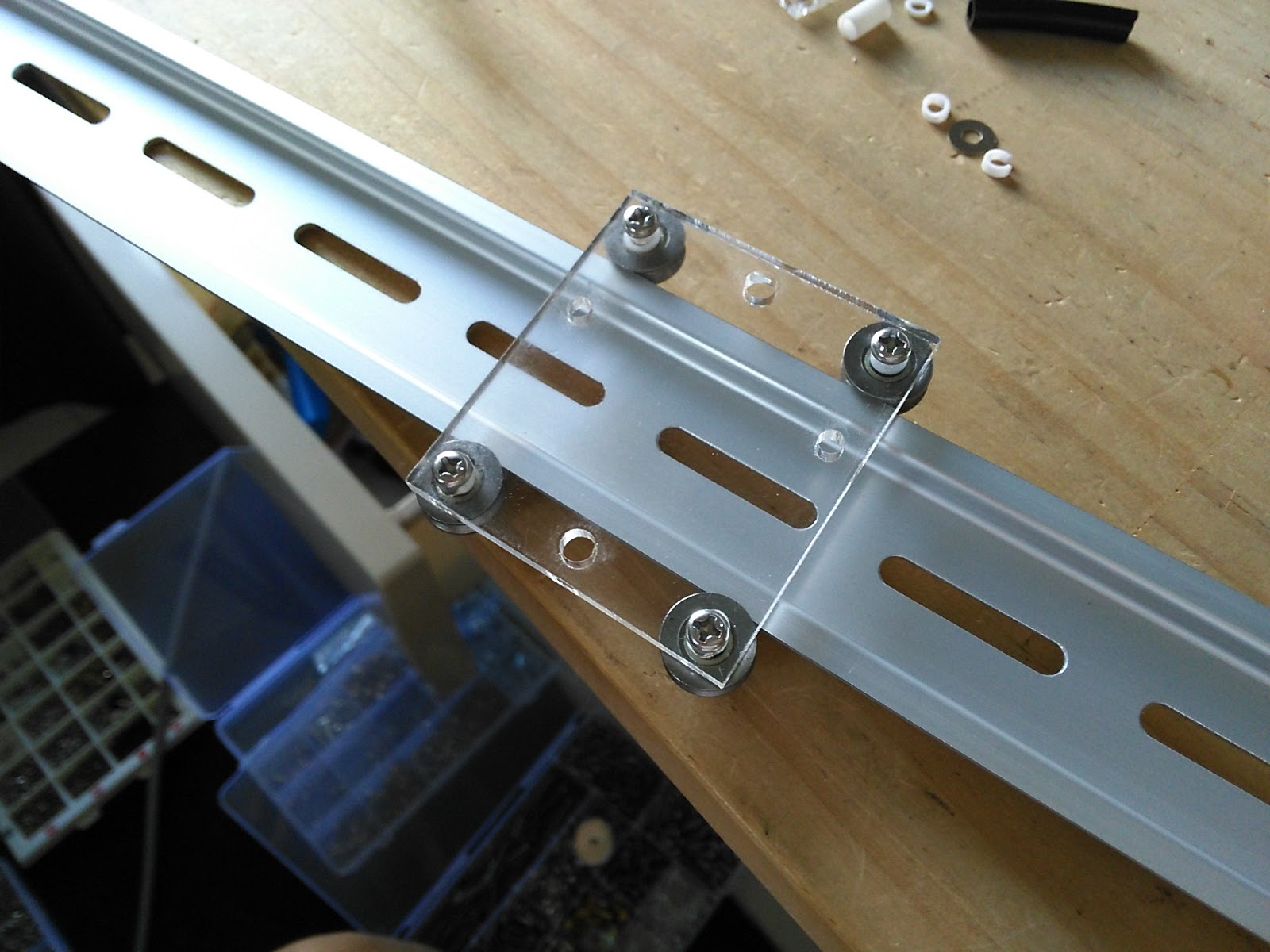
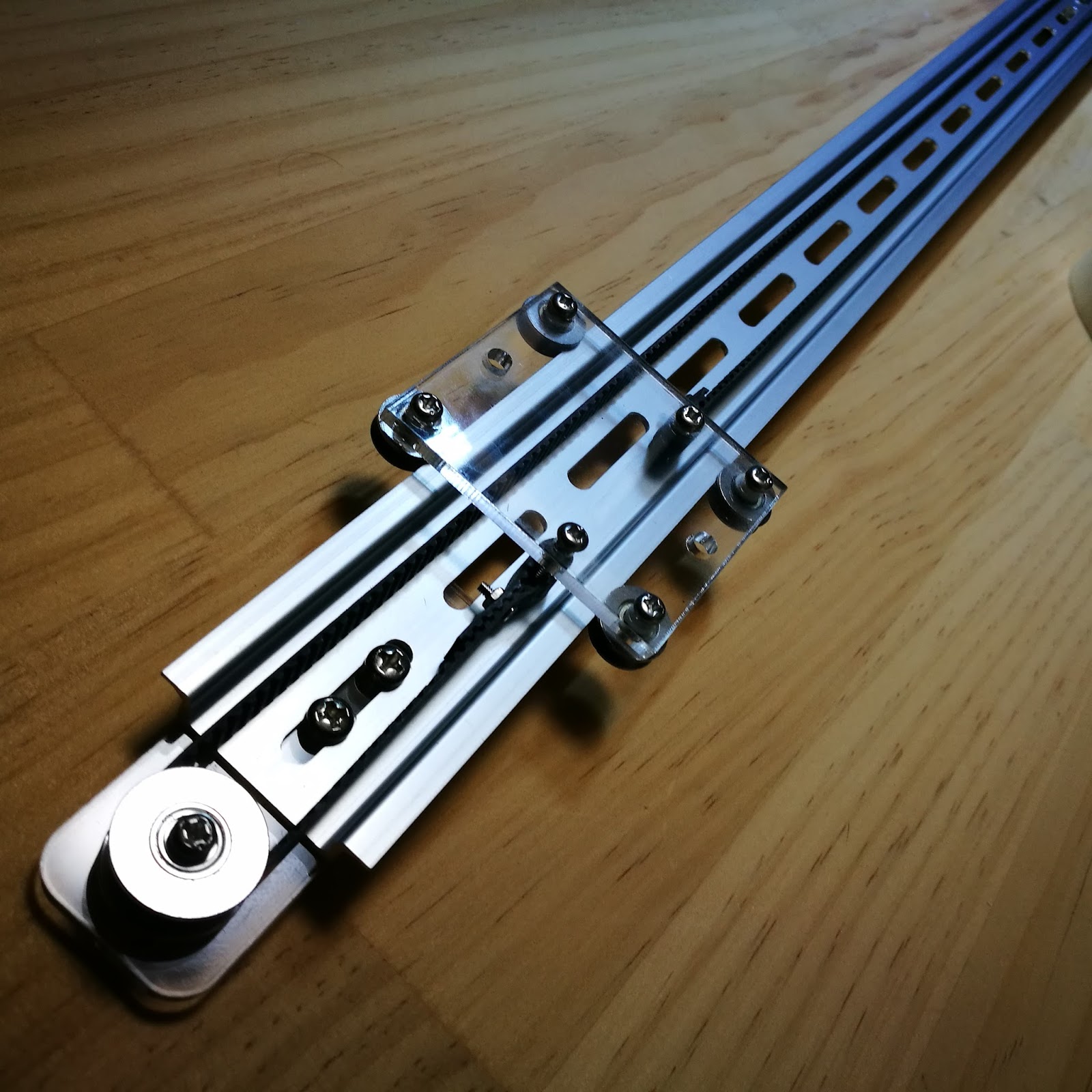
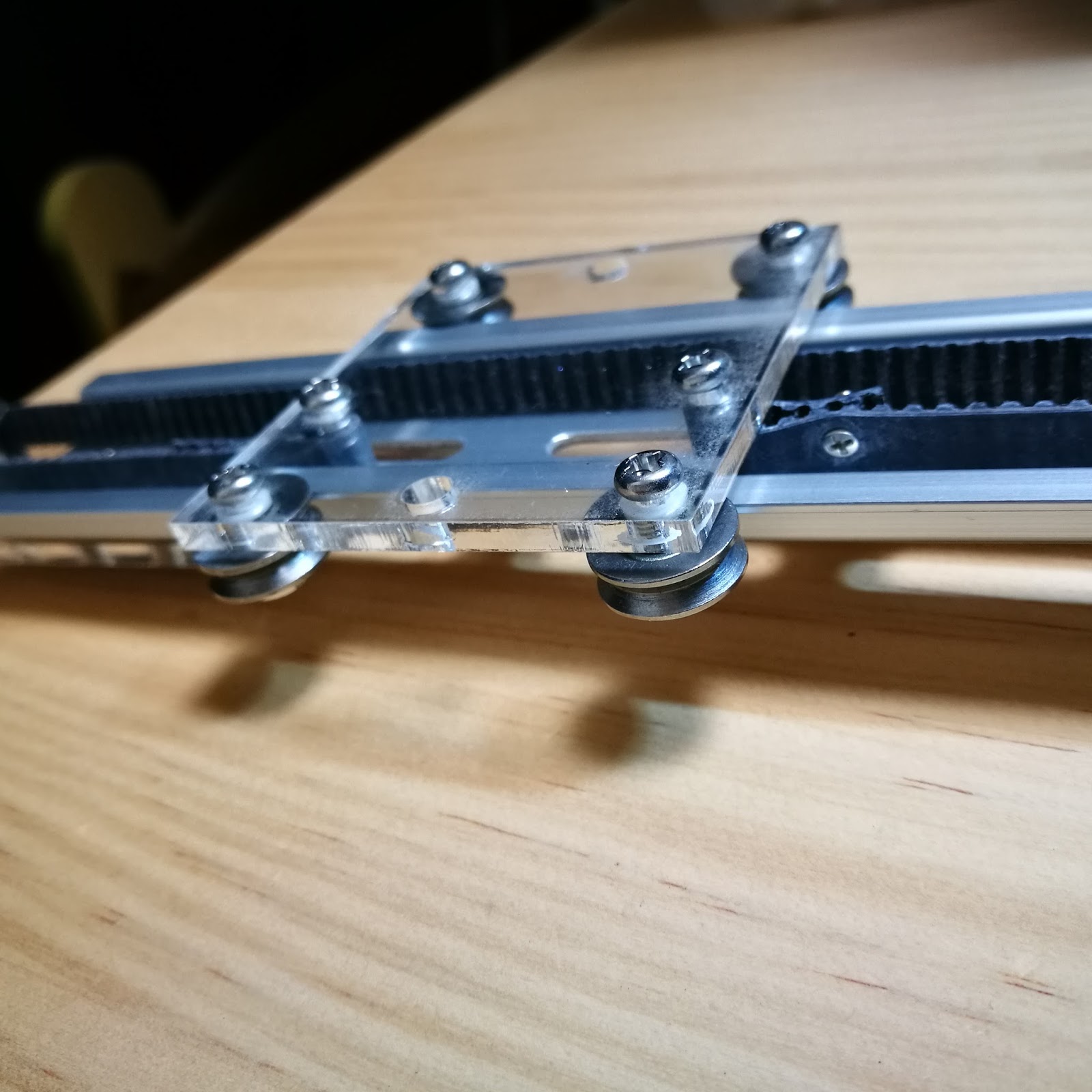
キャリッジにベアリングを固定していきます。今回はV溝ベアリングを使ってみました。
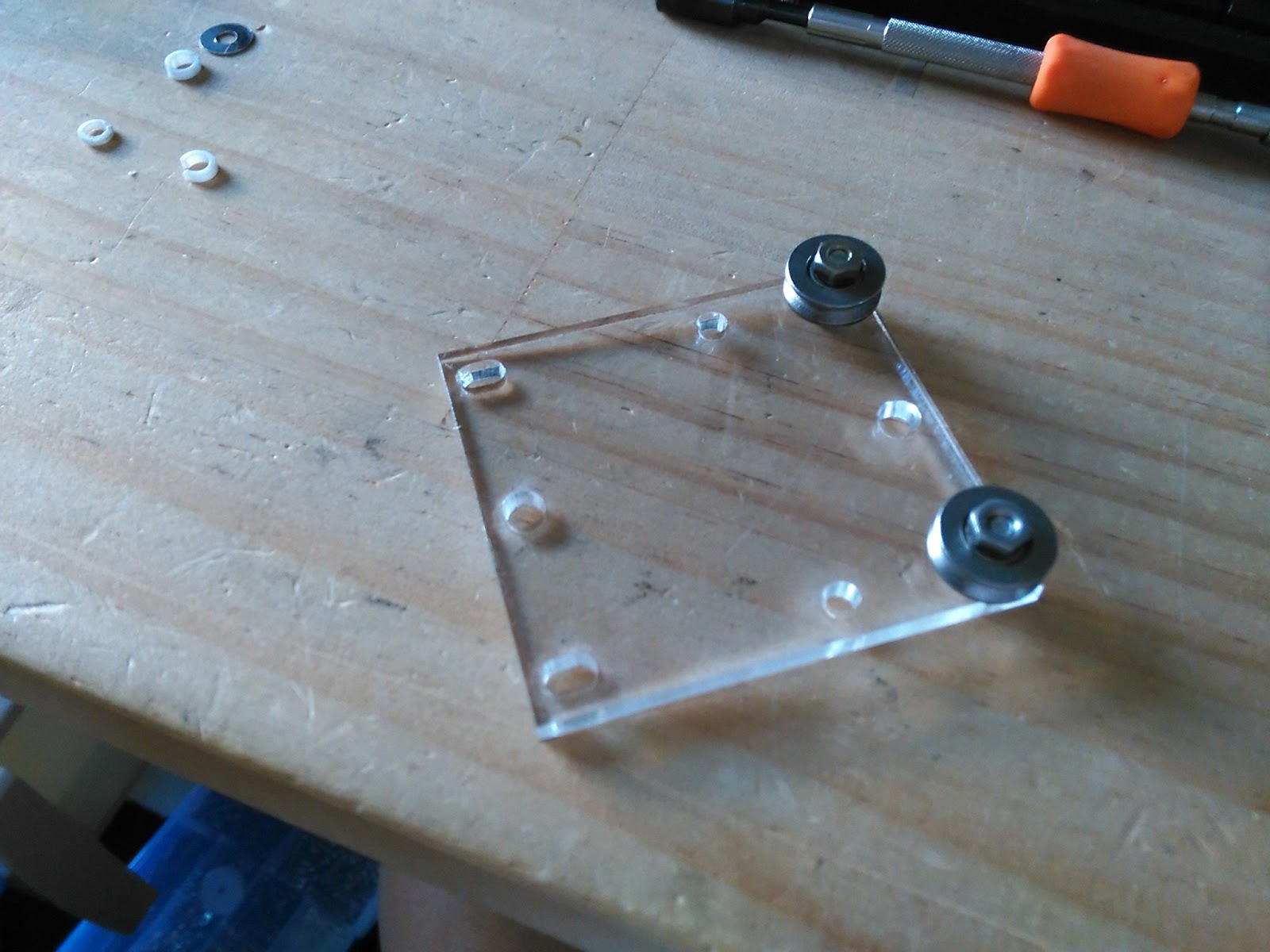
DINレールを挟み込む二対のベアリングを固定する穴の片方はスロットになっています。二つのベアリングを指で押さえながらちょうどよい締め込みになるように意識しつつ固定を行います。エキセントリックナットを使うことも考えていますが、今のところ手締めでも全くぐらつきやガタつきはなく、十分に安定しています。
プーリーつけます。ここは最後にベルトにテンションをかけるために仮止めとしておきます。DINレールに空いているスロットを使ってプーリの位置を変更することができます。これもDINレールを使う利点の一つです。

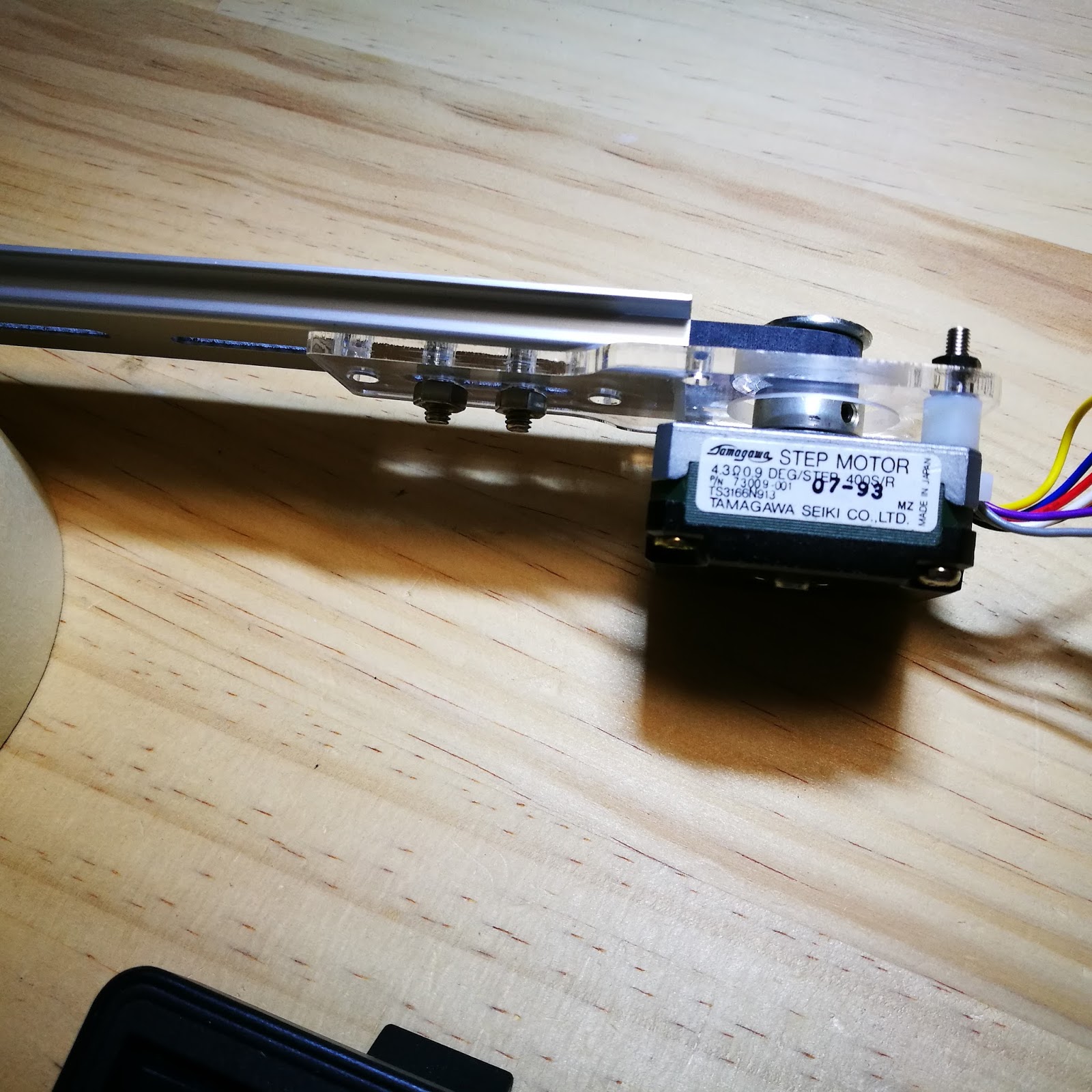
モータを取り付けます。
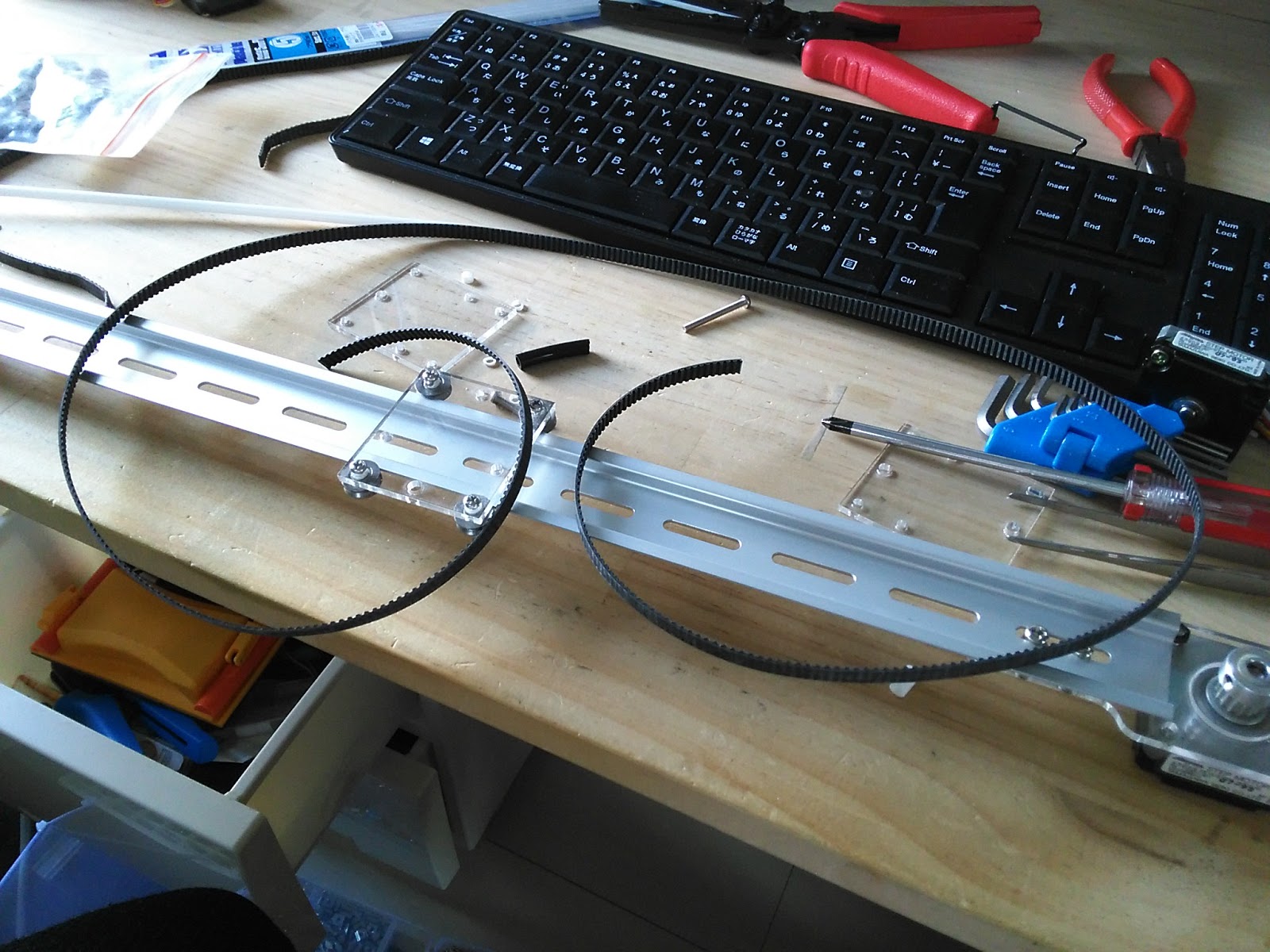
2.5Tのタイミングベルトを適切な長さに切断します。
ベルトの端はこのようにドリルで穴を開けて、
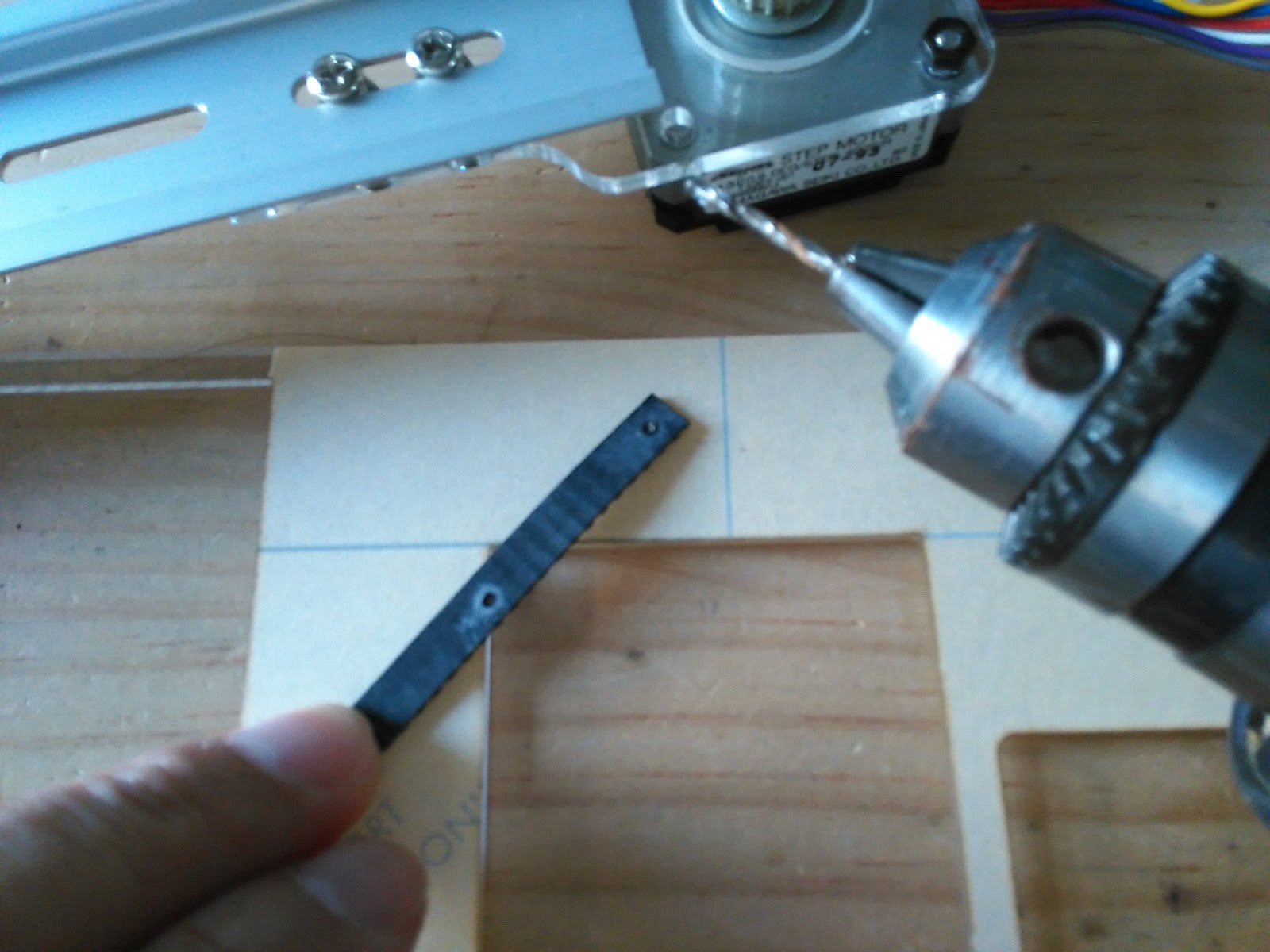
M2の小ねじを貫通させて、

反対側からナット締めてループを作ります。これを両端に作ってそれぞれ反対側からキャリッジにひっかけます。

ベルトをDINレールのくぼみの部分にぎりぎり収めるためにはモータを少しオフセットする必要がありました。タイミングプーリーをひっくり返してみましたが、そうすると芋ネジが空回りしてしまいNGでした。5mmのナイロンスペーサーでモータを浮かせます。
ベルトを回してキャリッジにひっかけ、プーリーを動かしてベルトにテンションをかければメカ部分は完成です。

薄いモータを使ったことで非常にすっきりした駆動部になっています。3Dプリンタを作るときはトルクに余裕を持たせるためにもう一段大きなモータにする必要があると思いますが、スライダーとして遊ぶうちはこれでいいでしょう。
キャリッジと対面のプーリー。シンプルで非常に美しい仕上がりです。

こんなにシンプルでよい構成だと思いますが、なぜ誰も作ってないのか不思議です。
いずれ強度的な問題が出るのかもと思ってはいますが、こうやって1軸のスライダーを作っている限りでは全く問題を感じません。
V溝ベアリングもU溝ベアリングもどちらも問題なく使えるようです。
今回購入したV溝ベアリングは軸部分のガタが大きく、下の写真の上下方向にキャリッジを揺らすと若干の動きがありますが、挟み込み方向、上下をZ方向とすると、XY平面であればどんなに力を入れても全くガタはありません。素晴らしい安定性です。
ベルトはこんな感じにもうぎりぎりですがちゃんとレールのくぼみに収まっています。
これがスライダー全体を薄くできる決め手と言っていいでしょう。
さて、メカ部分は出来上がりましたので、駆動側を作っていきます。ここからは電子工作であります。
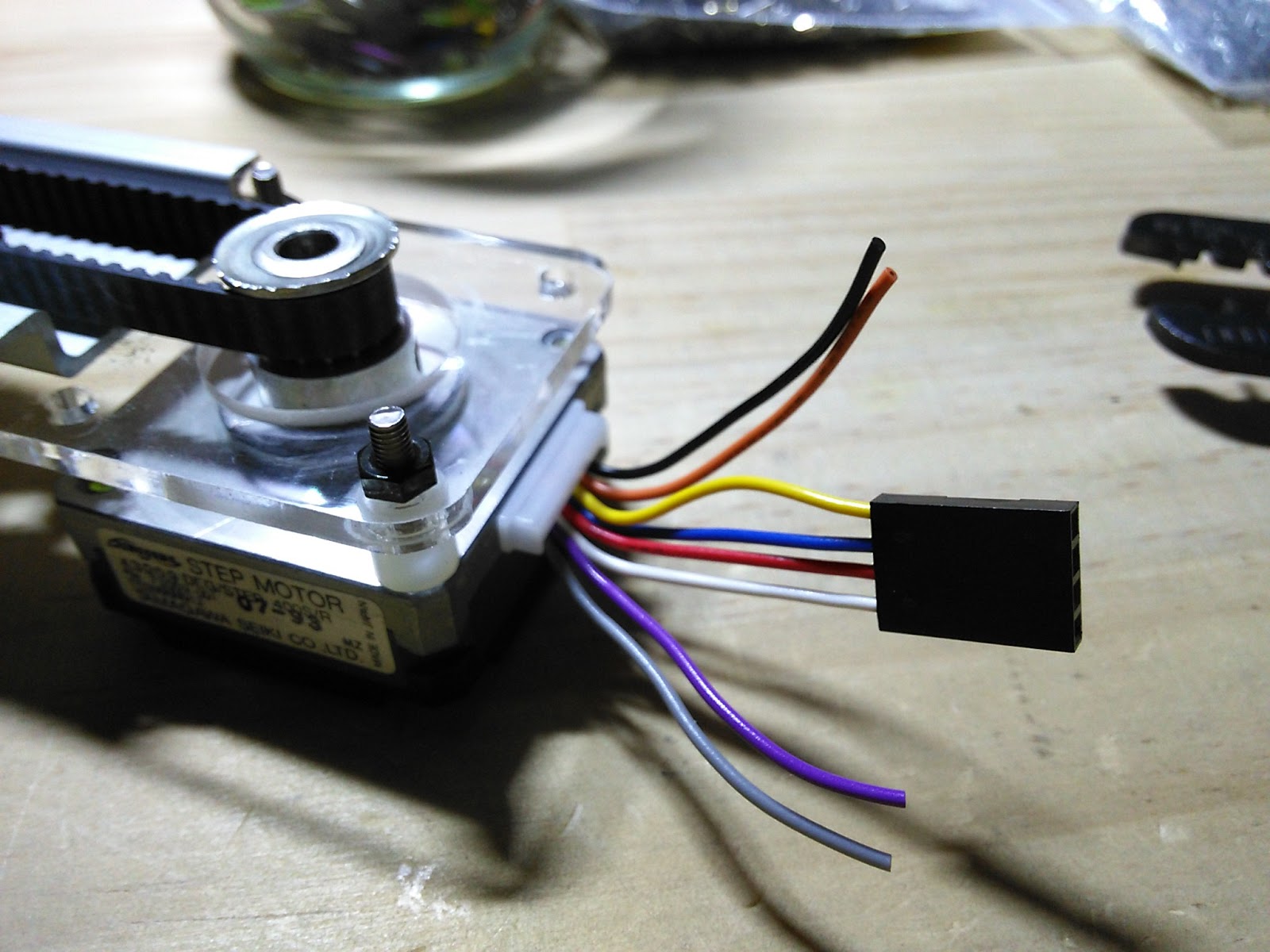
このモータからは線が8本も出ております。モータの側面のラベルには0.9DEG/STEPと記載されていますので2相駆動であることは間違いないと思われます。よって、以前投稿しましたタイプの4番、すなわち8本線の2相ユニポーラ結線と考えがちですが、このモータの場合は8本のうち4本が駆動、4本はセンサであることがわかっています。つまり2相バイポーラ結線であるということです。
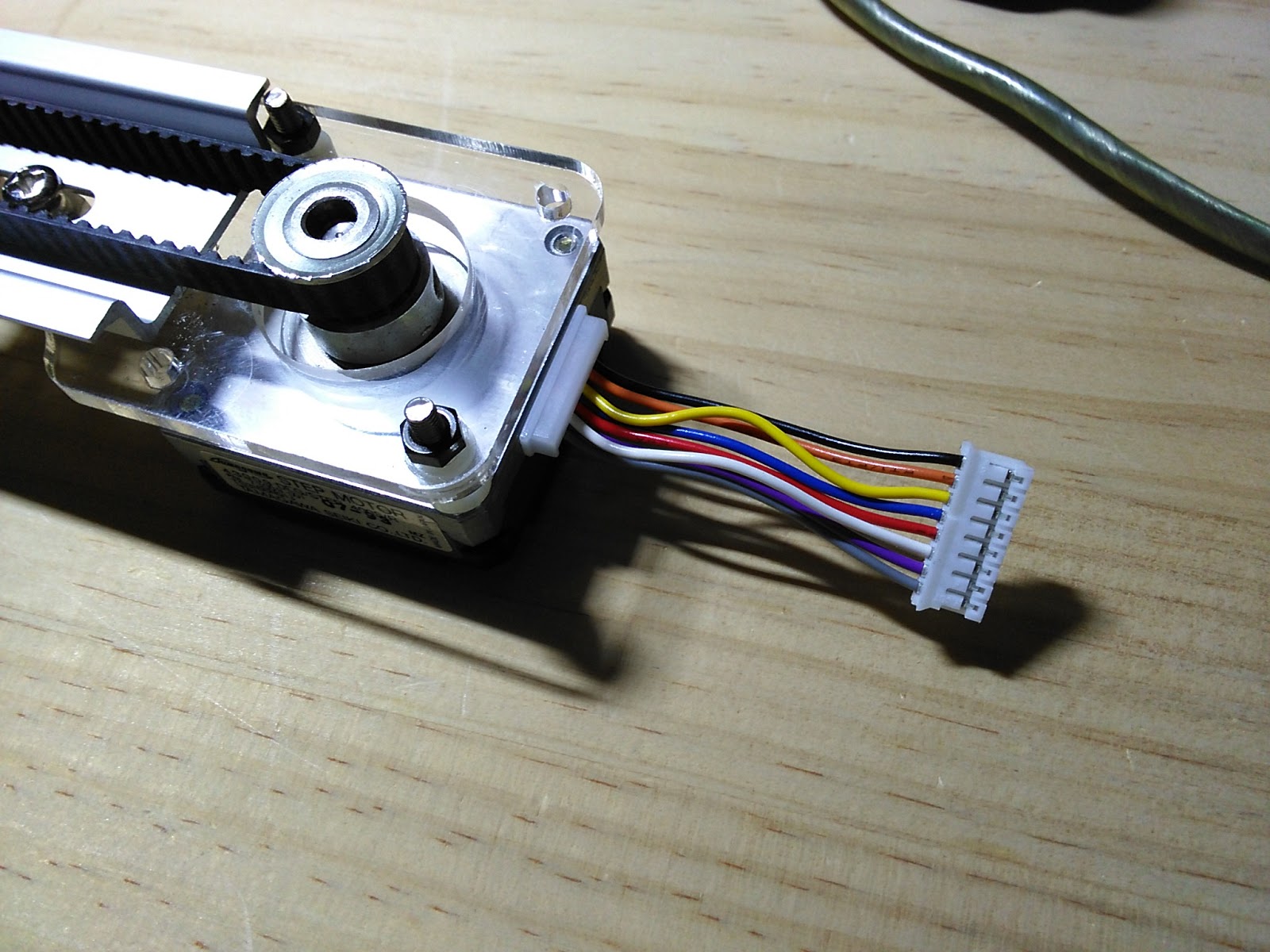
引き出し線が短いので気をつけて配線しないといけません。
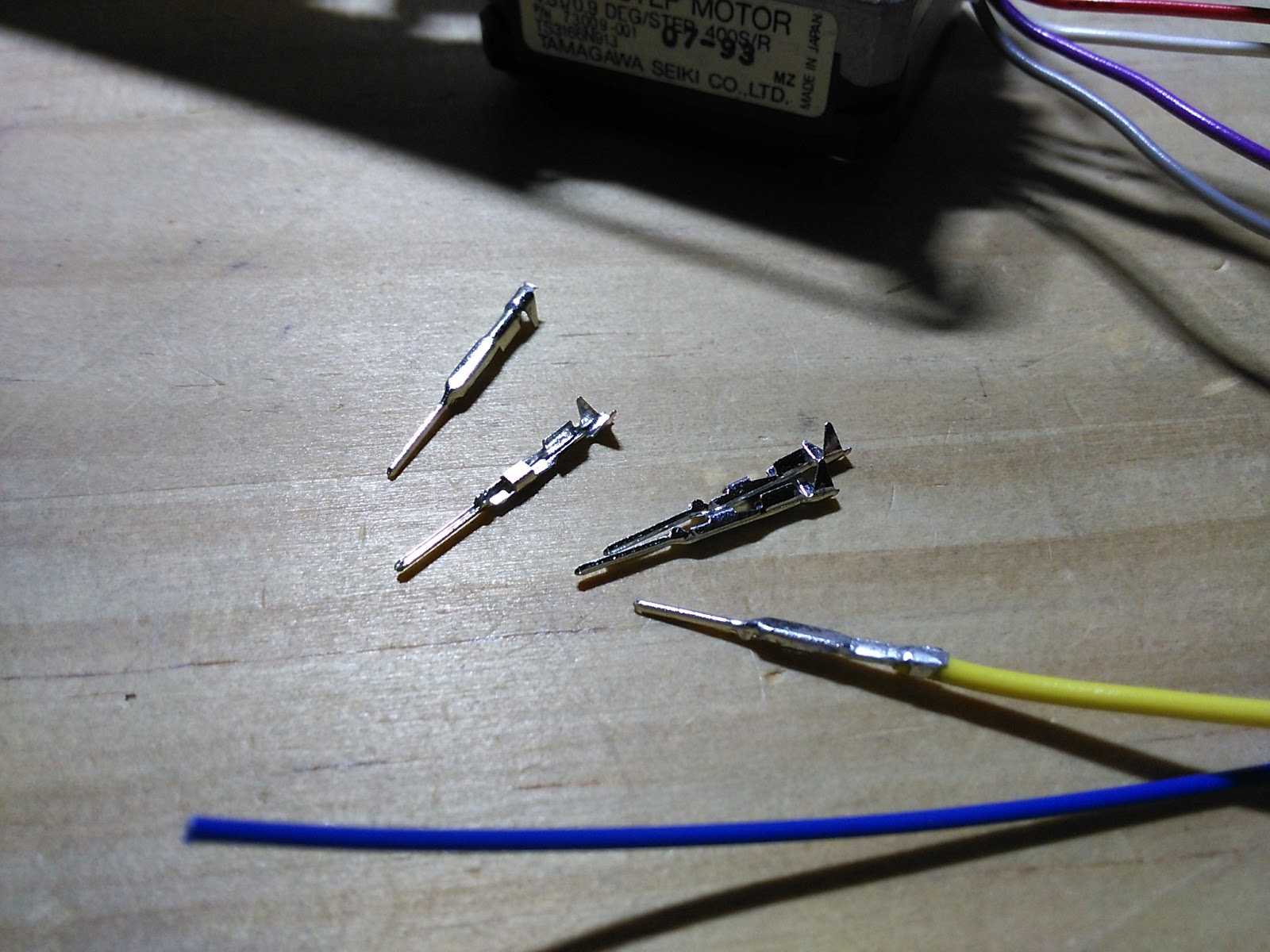
コネクタをアルティメットカッターで落として、
必要な線にコネクタを接続します。
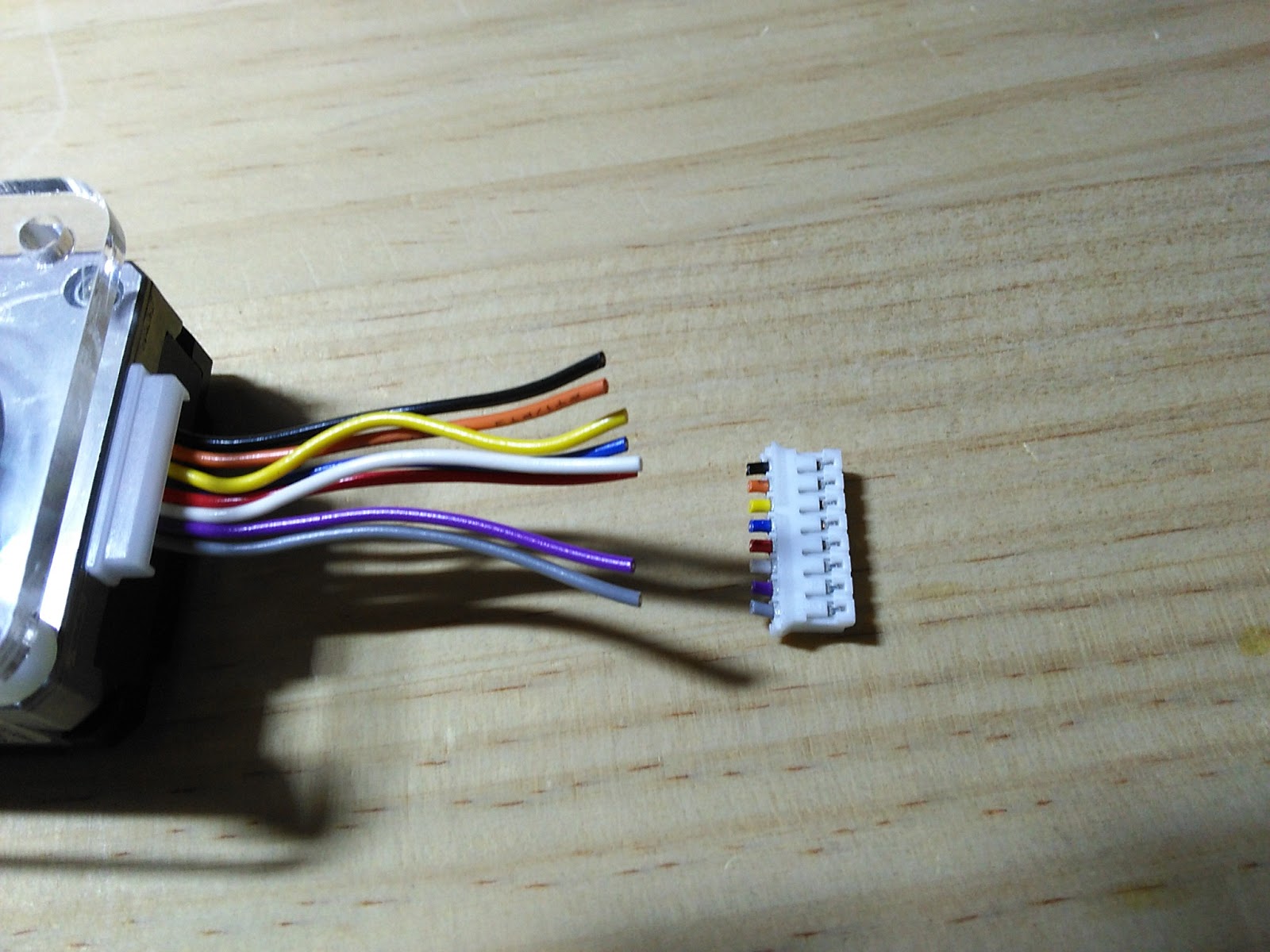
Qiコネクタを使うことにします。

いきなりですが、モータ部分のコネクタ完成。黄色と青がA相、赤と白がB相です。
延長しないと使いにくいので、同じ色のリード線を引っ張り出してきて、

延長ケーブルを作ります。
Qiコネクタはピンを締めるダイがありません。秋葉で何軒か聞いたのですが無いようです。Qiコネクタを打っている店の人がそういうのですからどうしようもないですね。変則的ですが、XHやPH用のPA09で締めていきます。ちょっと注意が必要ですが、慣れる問題なく使えます。
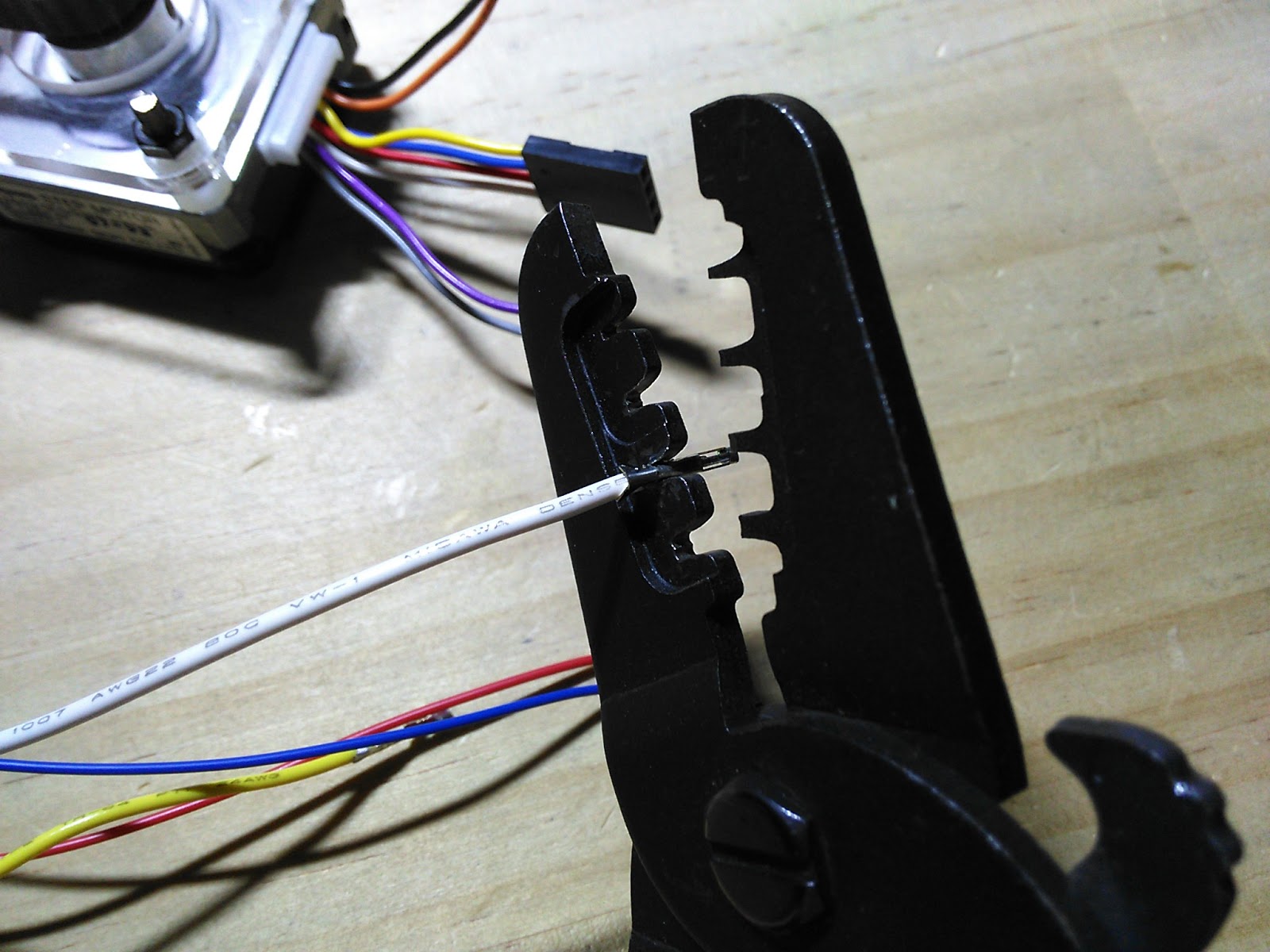
出来ました。

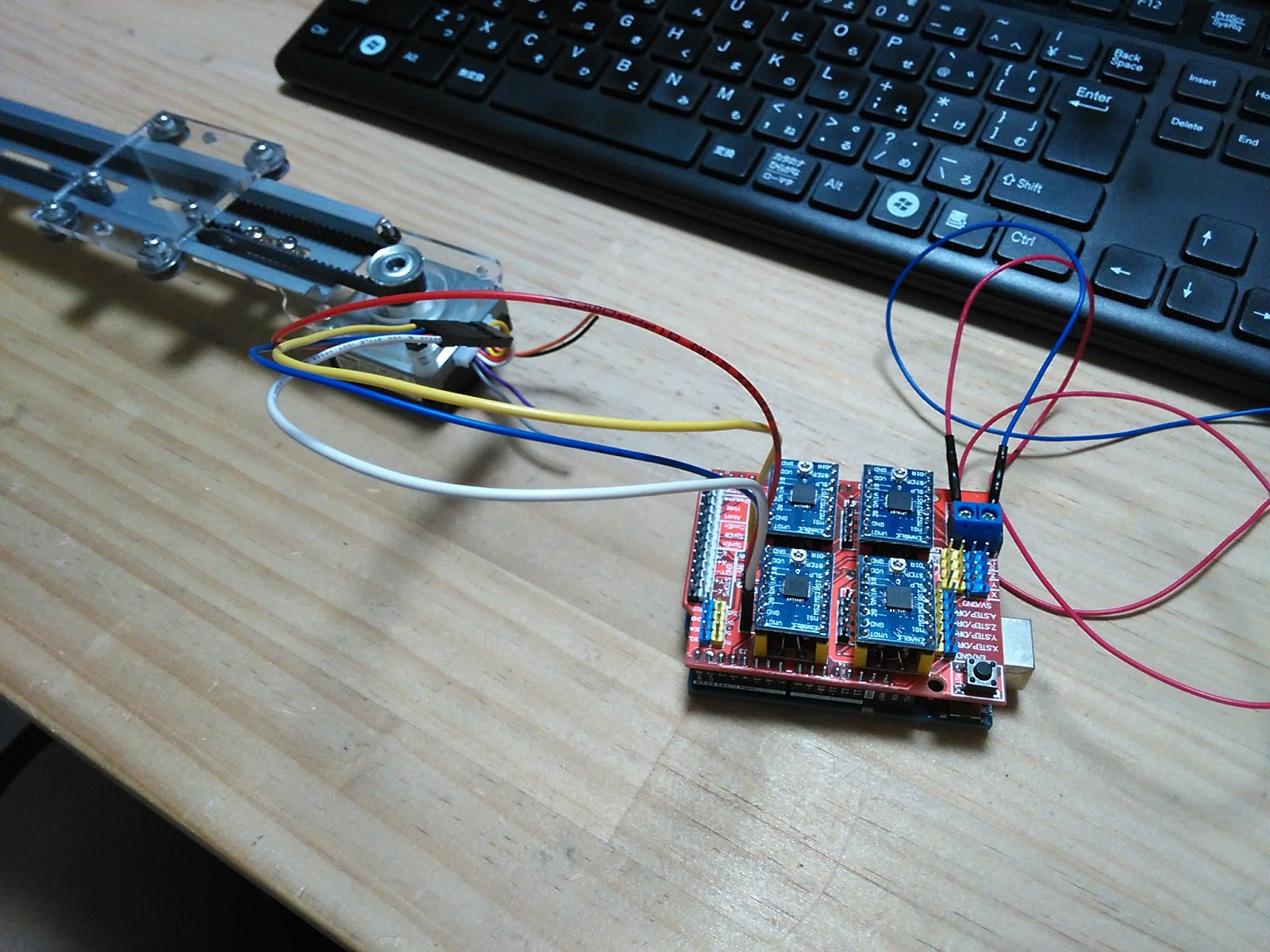
駆動テストはGRBLを使ってみました。
ArduinoのGRBLシールドをaitendoで買っていたのですが、ずっと放置していたので今回これも併せてテストすることに。
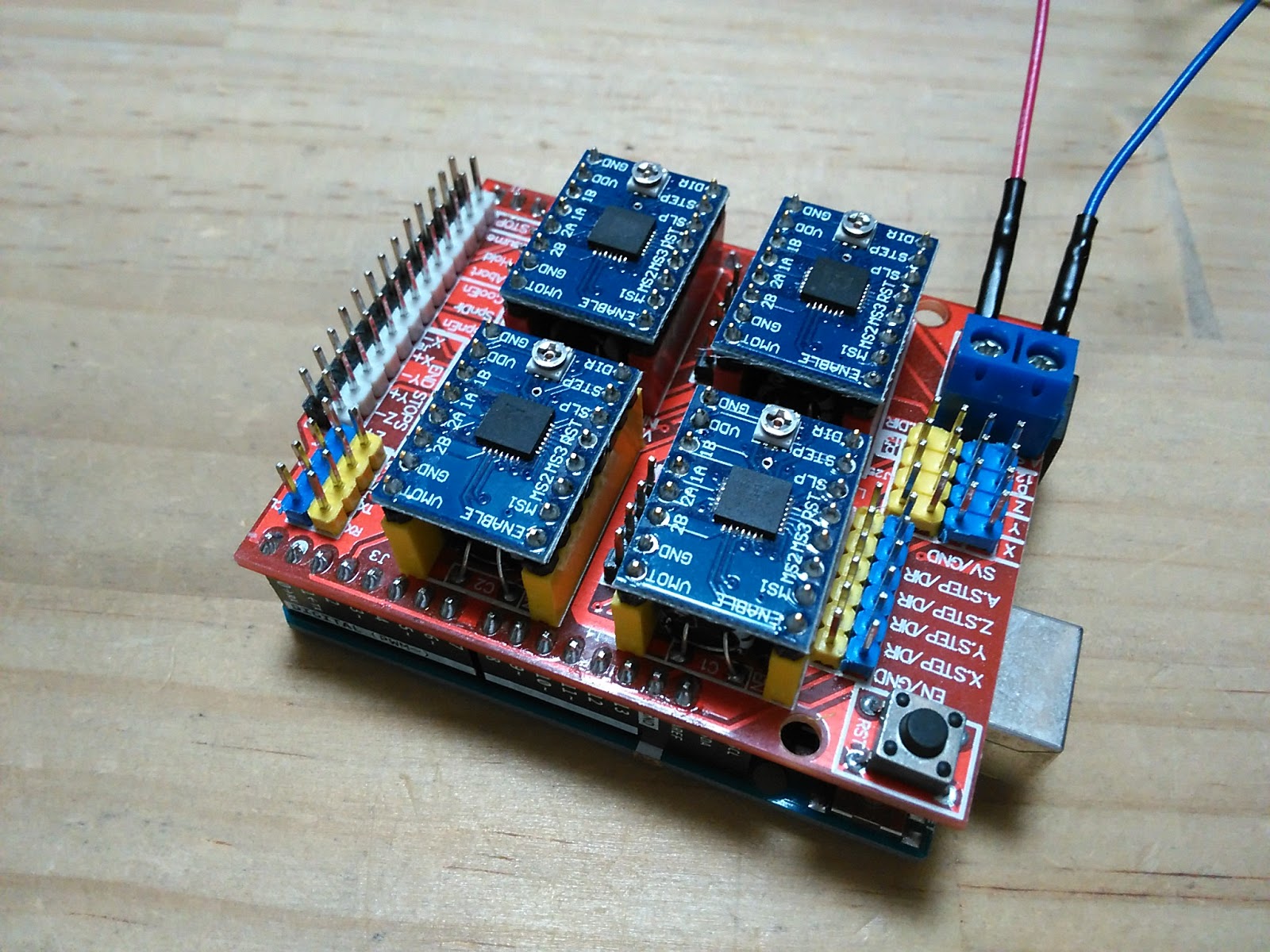
Arduinoは珍しく純正品を使用(笑
GRBLの仕様や結線についてはネット上にたくさん情報がありますので、それをご参照ください。
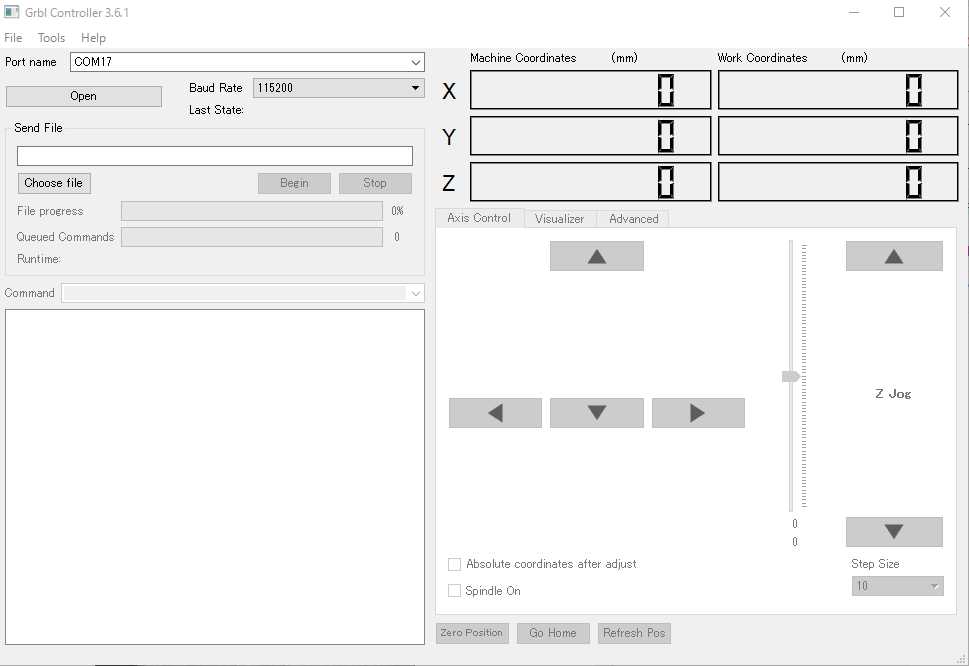
Gコードを送るソフトウェアはGRBLコントローラを使います。
シンプルすぎて使いにくいのですが、テストの用途には十分です。stepレシオとかとりあえずどうでもいいのでとにかく動かしてみます。
では動いているところを動画で。
全く問題ありません。DINレールスライダーすばらしいです。
ぜひぜひこれをベースにして3Dプリンタを作りたいです。
せっかくなのでちょっと遊んでみます。
たった一軸だけですが、こんな風にスマホ固定スタンドをキャリッジの上に乗せて、
このスタンドにスマホをセットして動画を撮るとこんな映像を撮影することができます。
もう一本
ね、キャリッジ上でスタンドが微妙に揺れていますが、映像自体はなんかプロっぽいと思いません?
カメラをレールに乗せてスライドさせるテクニックはテレビドラマでもよく使われますし、専用のスライダーがKickstarterで資金集めをしたりしています。
これと同じものがこんなにも簡単に作れてしまうんですよ。
ということで、ちょっとした思いつきで作り始めたDINレールスライダーでしたが、思いのほかいい感じに仕上がりました。
これを全面に使って3Dプリンタの設計を行いたいと思います。